1.本发明涉及具有奖品抓取部的奖品获取游戏装置。
背景技术:
2.以往,已知具有奖品抓取部的奖品获取游戏装置(参照专利文献1)。该奖品获取游戏装置包括物体抓取装置(奖品抓取部),该物体抓取装置包括可动式基部、装接到该基部的一对臂部、以及对应于各臂部的驱动机构。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利特开2012-45204号公报
技术实现要素:
6.然而,在现有的奖品获取游戏装置中,由于臂部和驱动机构等部件未构成一体化,所以导致物体抓取装置(奖品抓取部)的组装和部件更换较为麻烦。
7.本发明的目的在于使奖品抓取部的部件的组装和更换变得容易。
8.为了实现上述目的,第一发明所涉及的奖品获取游戏装置,其特征在于,具有:奖品抓取部,其包括基础构件和装接在所述基础构件上的吊臂单元,其中,所述吊臂单元包括:驱动源;基于所述驱动源的驱动而位移的吊臂保持部;以及由所述吊臂保持部保持的臂部,所述吊臂单元作为一个整体相对于所述基础构件可装卸。
9.在第一发明所涉及的奖品获取游戏装置中,包括驱动源、吊臂保持部和臂部在内的多个部件被单元化(一体化)而构成吊臂单元。尤其,吊臂单元作为一个整体而相对于基础构件可装卸。
10.由此,能够使得相对于基础构件的吊臂单元的组装和更换变得容易。其结果,能够使奖品抓取部的组装和部件更换变得容易。
11.后述的奖品获取游戏装置1相当于这里的奖品获取游戏装置。后述的基础构件510相当于这里的基础构件。后述的吊臂单元520相当于这里的吊臂单元。后述的奖品抓取部500相当于这里的奖品抓取部。后述的开合电机m1相当于这里的驱动源。后述的吊臂保持部550相当于这里的吊臂保持部。后述的吊臂560相当于这里的臂部。
12.第二发明所涉及的奖品获取游戏装置,其特征在于,在第一发明所涉及的奖品获取游戏装置中,具有:控制基板,用于控制所述驱动源的驱动,其中,所述控制基板设置在所述基础构件上。
13.在第二发明所涉及的奖品获取游戏装置中,用于控制驱动源的驱动的控制基板设置在基础构件上。
14.由此,即使在基础构件中设置有多个吊臂单元时,也可以通过一个控制板集中控制多个吊臂单元所涉及的驱动源,而不必为每个吊臂单元设置控制基板。其结果,能够抑制部件数量的增加。
15.后述的吊爪基板530相当于这里的控制基板。
16.第三发明所涉及的奖品获取游戏装置,其特征在于,在第一或第二发明所涉及的奖品获取游戏装置中,所述吊臂单元包括动力传输单元,所述动力传输单元是将动力传输机构进行单元化而构成的,所述动力传输机构用于将所述驱动源的动力传输到所述吊臂保持部。
17.在第三发明所涉及的奖品获取游戏装置中,用于将驱动源的动力传输到吊臂保持部的动力传输机构被单元化。
18.由此,能够使得动力传输单元的组装和更换变得容易。
19.后述的动力传输单元540相当于这里的动力传输单元。后述的动力传输单元540的动力传输机构相当于这里的动力传输机构。
20.第四发明所涉及的奖品获取游戏装置,其特征在于,在第一至第三发明中任一个所涉及的奖品获取游戏装置中,所述吊臂单元包括用于检测所述吊臂保持部的位置的位置检测单元。
21.在第四发明所涉及的奖品获取游戏装置中,可以将包括驱动源、吊臂保持部、臂部和位置检测单元在内的多个部件统一组装(一体组装),从而能够使得奖品抓取部的组装和部件更换变得容易。
22.后述的电位计580相当于这里的位置检测单元。
23.第五发明所涉及的奖品获取游戏装置,其特征在于,在第一至第四发明中任一个所涉及的奖品获取游戏装置中,所述吊臂单元包括用于检测由所述吊臂保持部所保持的臂部的类型的吊臂类型检测单元。
24.在第五发明所涉及的奖品获取游戏装置中,可以将包括驱动源、吊臂保持部、臂部和吊臂类型检测单元的多个部件统一组装(一体组装),从而能够使得奖品抓取部的组装和部件更换变得容易。
25.第六发明所涉及的奖品获取游戏装置,其特征在于,在第五发明所涉及的奖品获取游戏装置中,所述吊臂类型检测单元根据设置在所述臂部上的识别部的样式来检测所述臂部的类型。
26.在第六发明所涉及的奖品获取游戏装置中,能够以简单的结构检测臂部的类型。
27.后述的吊臂类型识别基板570相当于这里的吊臂类型检测单元。
28.第七发明所涉及的奖品获取游戏装置,其特征在于,在第一至第六发明中任一个所涉及的奖品获取游戏装置中,所述基础构件构成为可装接多个所述吊臂单元。
29.在第七发明所涉及的奖品获取游戏装置中,能够构成多种规格的奖品抓取部。
30.根据本发明,能够使得奖品抓取部的组装和部件更换变得容易。
附图说明
31.图1是示出奖品获取游戏装置1的外观的立体图。
32.图2是第一示例所涉及的设置有奖品布置机构30的奖品布置框单元20的立体图。
33.图3是第二示例所涉及的设置有奖品布置机构30的奖品布置框单元20的立体图。
34.图4是示出对应“两爪规格”的奖品抓取部500的构成的立体图。
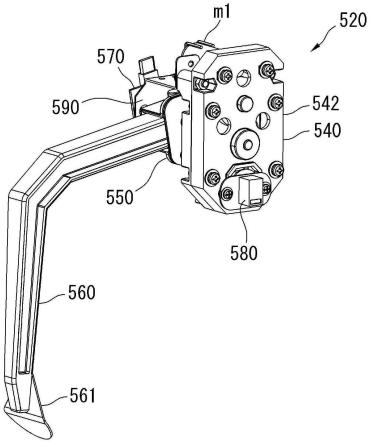
35.图5是示出吊臂单元520的正面一侧的立体图。
36.图6是示出吊臂单元520的背面一侧的立体图。
37.图7是吊臂单元520的分解立体图。
38.图8是示出对应“三爪规格”的奖品抓取部500的构成的立体图。
39.图9是示出奖品获取游戏装置1的控制系统的构成的方框图。
40.附图标记说明
41.1 奖品获取游戏装置
42.500 奖品抓取部
43.501 吊爪盒
44.510 基础构件
45.520 吊臂单元
46.530 吊爪基板
47.540 动力传输单元
48.550 吊臂保持部
49.560 吊臂
50.570 吊臂类型识别基板
51.580 电位计
52.590 基部构件
53.m1 开合电机。
具体实施方式
54.下面,参照附图说明本发明的实施方式。
55.在本实施方式中,对本发明所涉及的奖品获取游戏装置应用于奖品获取游戏装置1的示例进行说明,奖品获取游戏装置1用于执行奖品获取游戏。
56.在“奖品获取游戏”中,玩家(用户)通过对操作部16进行操作来移动奖品抓取部500而使布置在奖品布置区域ae中的奖品p掉落到开口区域oe中,从而能够赢取奖品p。
[0057]“奖品p”可以是通过获取而给予玩家的物品,也可以是即使获取到也不直接给予玩家,而是在获取后可兑换成其他物品(给予玩家的物品)。
[0058]
[奖品获取游戏装置1的构成]
[0059]
接着,说明各奖品获取游戏装置1的构成。
[0060]
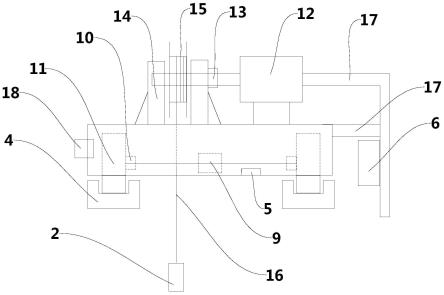
图1是示出奖品获取游戏装置1的外观的立体图。
[0061]
这里,在图1所示的示例中,示出了在一台框体(机体)10中设置有两台奖品获取游戏装置1的例子。即,两台奖品获取游戏装置1使用共同的框体10。此外,也可以在一台框体10中设置一台奖品获取游戏装置1。又,也可以在一台框体10中设置三台或三台以上的奖品获取游戏装置1。
[0062]
另外,在以下的说明中,有时将设置在框体10中的各个奖品获取游戏装置1称为“机台”。即,在一台框体10中设置两个机台(左机台和右机台)。
[0063]
如图1所示,奖品获取游戏装置1包括框体10、配置在框体10中的奖品布置框单元20、装接到奖品布置框单元20的奖品布置机构30、装接到框体10的抓吊单元40、装接到框体10的各种发光设备(未图示)、装接到框体10的扬声器(参照图9)、以及配置在框体10内的主
控制基板50(参照图9)。
[0064]
[框体10]
[0065]
接着,说明框体10的构成。
[0066]
框体10形成为箱状。框体10中设有用于进行奖品获取游戏的游戏区域(游玩区域)ge。框体10包括上框体11和下框体12。
[0067]
上框体11的前面、背面、左侧面和右侧面均由诸如玻璃或丙烯酸板等透明板材构成。因此,玩家可以从框体10的外部观察到形成在框体10内部的游戏区域ge。
[0068]
上框体11的前面由滑动门构成并且可以打开和关闭。因此,操作员可以通过打开上框体11的前面而在游戏区域ge中诸如布置、移动奖品p或设置、改变奖品布置机构30。
[0069]
下框体12的前面上设置有控制面板13。控制面板13上设有投币口14、触摸面板显示器15、及操作部16。
[0070]
玩家可以通过投币口14投入硬币(货币)。通过将硬币投入投币口14,玩家可以获得用于玩奖品获取游戏的积分。另外,还可以设置使用预付卡或信用卡等存储介质的电子货币的支付设备,从而可以通过支付电子货币来获得积分。
[0071]
触摸面板显示器15具有显示各种图像的功能和接收用户的输入操作的功能。具体地,触摸面板显示器15包括触摸面板15a(参照图9)和显示部15b(参照图9)。触摸面板15a是诸如电容型、压敏型的输入装置,并且接收通过用户的手指、触摸笔等的输入操作。显示部15b由液晶显示器、有机el(电致发光,electro-luminescence)显示器等实现。
[0072]
在显示部15b上显示玩家获得的积分的余额等各种信息。即,每次将硬币投入投币口14以获得积分,则显示部15b上显示的积分余额会增加。又,每玩一次奖品获取游戏,则显示部15b上显示的积分余额会减少。
[0073]
操作部16接收玩家的操作。操作部16包括第一操作按钮16a和第二操作按钮16b。操作按钮16a和16b可供玩家进行按下操作。第一操作按钮16a接收在奖品获取游戏期间沿x方向(左右方向)移动奖品抓取部500的操作。第二操作按钮16b接收在奖品获取游戏期间沿y方向(深度方向)移动奖品抓取部500的操作。
[0074]
操作部16也可以构成为包括第三操作按钮,该第三操作按钮接收在奖品获取游戏期间沿z方向(上下方向)移动奖品抓取部500的操作。或者,作为操作部16也可以构成为具备在奖品获取游戏期间接收沿水平方向(左右方向和深度方向)移动奖品抓取部500的操作的摇杆(joy stick)、以及接收沿z方向(上下方向)移动奖品抓取部500的操作的下降按钮。
[0075]
此外,在下框体12的前面上,设有与开口区域oe(参照图2和图3)连通的奖品取出口17。这里,奖品布置机构30的下方布置有奖品滑道(未图示)。此外,在奖品布置机构30的下方设置有奖品获取传感器17a(参照图9)。奖品获取传感器17a响应于从开口区域oe落下来的奖品p的检测(奖品p的获取)而向主控制基板50输出预定的检测信号。此外,奖品取出口17的内部设置有奖品落下传感器17b(参照图9)。奖品落下传感器17b响应于掉落到奖品取出口17内的奖品p的检测(奖品p的获取)向主控制基板50输出预定的检测信号。
[0076]
处理部51基于来自奖品获取传感器17a的检测信号的输入来检测奖品p的获取,并执行后述的获取时发光演出。此外,当从奖品落下传感器17b有检测信号的输入的状态持续预定时间时,处理部51视为检测到特定错误。当发生诸如奖品p意外掉落、忘记取出奖品p、或者人或异物进入奖品取出口17内时,视为检测到“特定错误”。另外,对于奖品获取传感器
17a和奖品落下传感器17b,可以任意地分别切换检测状态和非检测状态。
[0077]
然后,掉落到开口区域oe的奖品p被奖品获取传感器17a检测到后,借由奖品滑道引导至奖品取出口17,并由奖品落下传感器17b检测到。由此,玩家可以得到从奖品取出口17取出的奖品p。
[0078]
此外,在下框体12的前面上设置有开合门(未图示)。开合门的内部设置有各种控制基板(主控制基板50等)。
[0079]
[奖品布置框单元20]
[0080]
接着,说明奖品布置框单元20的构成。
[0081]
图2是第一示例所涉及的设置有奖品布置机构30的奖品布置框单元20的立体图。图3是第二示例所涉及的设置有奖品布置机构30的奖品布置框单元20的立体图。
[0082]
如图1至图3所示,奖品布置框单元20设置在框体10中。奖品布置框单元20包括基础框架(未图示)、可升降地装接到基础框架的整体升降架220、以及可升降地装接到整体升降架220的六组独立升降架231至236。
[0083]
整体升降架220包括左框架单元221、右框架单元222、以及连接左框架单元221和右框架单元222的连接框架(未图示)。
[0084]
左框架单元221和右框架单元222具有左右对称结构。左框架单元221和右框架单元222均构成为网格状。
[0085]
整体升降架220可升降地装接到基础框架上。具体地,各个框架单元221、222上设置有整体升降滑动部件(未图示)。此外,基础框架上设置有整体升降导轨(未图示),设置在各个框架单元221、222上的整体升降滑动部件被该整体升降导轨支撑而能够升降。通过将整体升降滑动部件设置在整体升降导轨中,整体升降架220被装接到基础框架上。整体升降滑动部件可沿整体升降导轨在上下方向上滑动。由此,整体升降架220可以相对于基础框架而升降。
[0086]
进一步地,基础框架上设置有整体升降锁定机构(未图示)。整体升降锁定机构可以锁定(固定)整体升降架220相对于基础框架的升降。由此可以将整体升降架220锁定到任意高度。
[0087]
六组独立升降架231至236具有基本相同的构造。各个独立升降架231至236包括基架237、一对导杆238、及独立升降滑动部件(未图示)。
[0088]
基架237形成为方柱状。基架237设置成沿深度方向延伸。这里,在以下的说明中,在基架237的四个侧面中,将上侧的侧面称为“上侧面”,将下侧的侧面称为“下侧面”,并且将内侧(游戏区域ge侧)的侧面称为“内侧面”。
[0089]
在基架237的四个侧面中,至少在内侧面上设有t形槽tg。在本实施方式中,在基架237的四个侧面中的内侧面和上侧面上设置有t形槽tg。
[0090]
各个t形槽tg沿着基架237的长度方向(基架237延伸的方向)直线地延伸。各个t形槽tg沿着基架237的长度方向从一端设置到另一端。
[0091]
各个导杆238形成为圆柱状。各个导杆238设置成从基架237的下侧面向下方延伸。一对导杆238沿着基架237的长度方向以预定的间隔排列设置。
[0092]
在本实施方式中,在左框架单元221上装接有三组独立升降架231至233。三组独立升降架231至233沿着深度方向以预定的间隔排列设置。各独立升降架231至233装接成相对
于左框架单元221可升降。尤其,三组独立升降架231至233可独立地分别升降。
[0093]
具体地,在各个独立升降架231至233中,在导杆238的下端部设置有独立升降滑动部件(未图示)。此外,左框架单元221设置有独立升降导轨(未图示),设置在独立升降架231至233上的独立升降滑动部件被该独立升降导轨支撑而能够升降。通过将一对导杆238插通到设置在左框架单元221的上表面上的导孔(未图示)中,并且将独立升降滑动部件设置到独立升降导轨中,从而将各个独立升降架231至233装接到左框架单元221。而且,各个导杆238可相对于插通有该导杆238的导孔沿上下方向滑动。进一步地,独立升降滑动部件可沿着独立升降导轨在上下方向上滑动。由此,各个独立升降架231至233可相对于左框架单元221升降。尤其,各个独立升降架231至233的基架237可相对于左框架单元221升降。
[0094]
此外,在右框架单元222上装接有三组独立升降架234至236。三组独立升降架234至236沿深度方向以预定的间隔排列设置。各个独立升降架234至236装接成相对于右框架单元222可升降。尤其,三组独立升降架234至236可独立地分别升降。
[0095]
具体地,在各个独立升降架234至236中,在导杆238的下端部设置有独立升降滑动部件(未图示)。此外,右框架单元222设置有独立升降导轨(未图示),设置在独立升降架234至236上的独立升降滑动部件被该独立升降导轨支撑而能够升降。通过将一对导杆238插通到设置在右框架单元222的上表面上的导孔(未图示)中,并且将独立升降滑动部件设置到独立升降导轨中,从而将各个独立升降架234至236装接到右框架单元222。而且,各个导杆238可相对于插通有该导杆238的导孔沿上下方向滑动。进一步地,独立升降滑动部件可沿着独立升降导轨在上下方向上滑动。由此,各个独立升降架234至236可相对于右框架单元222升降。尤其,各个独立升降架234至236的基架237可相对于右框架单元222升降。
[0096]
各个独立升降架231至236包括独立升降锁定机构(未图示)。各个独立升降架231至236中的独立升降锁定机构可以锁定(固定、保持)该独立升降架231至236相对于整体升降架220的升降。由此,能够将各个独立升降架231至236锁定到任意高度。
[0097]
在框体10内设有进行奖品获取游戏的游戏区域ge。奖品布置机构30是用于在游戏区域ge中布置奖品p的机构。即,通过奖品布置机构30将奖品p布置在游戏区域ge中。此时,作为布置方式,可以根据奖品布置机构30的构造来选择载置、悬挂、夹持等多种方式。
[0098]
具体地,在本实施方式中,由于奖品布置机构30使得在游戏区域ge中形成奖品布置区域ae和开口区域oe。
[0099]“奖品布置区域ae”是用来布置奖品p的区域。
[0100]“开口区域oe”是在奖品p落下来后可以取到该奖品p的区域。
[0101]
[奖品布置机构30]
[0102]
接着,说明奖品布置机构30的构成。
[0103]
奖品布置机构30可装接在六组独立升降架231至236中的一个或多个独立升降架231至236。此时,奖品布置机构30被装接在基架237上。
[0104]
奖品布置机构30由一个组成部件或通过组合多个组成部件而构成。
[0105]
在本实施方式中,作为构成奖品布置机构30的组成部件,备有楼层框架ff、楼层面板fp、柔性杆(未图示)等。通过组合这些组成部件中的一个或多个来构成奖品布置机构30。
[0106]
以下,对各个组成构件进行说明。
[0107]
楼层框架ff通过将四根框架连接成环形(无端头形状)而构成。由此,楼层框架ff
在平面图中是大致矩形的框体。这里,作为楼层框架ff,也可以预备具有不同尺寸的多种的楼层框架ff。在楼层框架ff的侧面上设置有一个或多个固定件。固定件可以嵌合到在基架237上所设有的t形槽tg中。楼层框架ff可以通过固定件装接到基架237的上侧面或内侧面上。
[0108]
楼层面板fp在平面图中形成为大致方形的平板形状。楼层面板fp可以装接到楼层框架ff的上面(下面)。楼层面板fp通过螺钉固定到楼层框架ff的上面。
[0109]
柔性杆由两根管状体构成,即,通过将一个管状体的全部或一部分插入(嵌合)到另一个管状体的内部来构成柔性杆。一个管状体可收纳(缩进)至另一个管状体的内部,并也可从该另一个管状体的内部伸出来,通过在该收纳或伸出方向上的滑动,可以改变(调整)柔性杆的长度方向的尺寸。柔性杆的两端部设有固定件。固定件可以嵌合到在基架237上所设有的t形槽tg中。而且,通过固定件可以将柔性杆装接到基架237的上侧面或内侧面上。
[0110]
[奖品布置机构30的构成示例]
[0111]
接着,说明奖品布置机构30的构成示例。
[0112]
如上所述,在本实施方式中,通过组合楼层框架ff、楼层面板fp、柔性杆等,可以构成具有各种形状的奖品布置机构30。
[0113]
下面,示出奖品布置机构30的一个示例。
[0114]
[第一示例所涉及的奖品布置机构30]
[0115]
首先,说明第一示例所涉及的奖品布置机构30。
[0116]
如图2所示,第一示例所涉及的奖品布置机构30通过在左框架单元221和右框架单元222之间桥接一对楼层框架ff而构成。此时,里侧的楼层框架ff经由小型楼层框架ffs装接到左框架单元221和右框架单元222上。
[0117]
即,在构成前侧的楼层框架ff的一对纵框架中,其中一个纵框架装接到构成独立升降架231的基架237的内侧面和构成独立升降架232的基架237的内侧面上。此外,在构成前侧的楼层框架ff的一对纵框架中,其中另一个纵框架装接到构成独立升降架234的基架237的内侧面和构成独立升降架235的基架237的内侧面上。
[0118]
进一步地,独立升降架232和235的基架237设置在相比独立升降架231和234的基架237更低的位置。
[0119]
由此,前侧的楼层框架ff被设置成其上表面朝向里侧倾斜的状态。在前侧的楼层框架ff的上面装接有楼层面板fp。由此,楼层面板fp的上表面构成了第一奖品载置面a。此时,第一奖品载置面a朝向里侧倾斜。
[0120]
在独立升降架233的基架237的上侧面装接有一个小型楼层框架ffs。又,在独立升降架236的基架237的上侧面装接有另一个小型楼层框架ffs。
[0121]
在构成里侧的楼层框架ff的一对纵框架中,其中的一个纵框架装接到一个小型楼层框架ffs的上侧面和构成独立升降架233的基架237的内侧面上。又,在构成里侧的楼层框架ff的一对纵框架中,其中另一个纵框架装接到另一个小型楼层框架ffs的上侧面和构成独立升降架236的基架237的内侧面上。
[0122]
由此,里侧的楼层框架ff被设置成其上表面朝向前侧倾斜的状态。在里侧的楼层框架ff的上面装接有楼层面板fp。由此,楼层面板fp的上表面构成了第二奖品载置面b。此
时,第二奖品载置面b朝向前侧倾斜。
[0123]
这里,在第一示例所涉及的奖品布置机构30中,一对楼层框架ff装接到不同的独立升降架231至236上。由此,可以分别调整第一奖品载置面a和第二奖品载置面b的高度。
[0124]
即,可以通过相对于整体升降架220升降各个独立升降架231、232、234和235来调节第一奖品载置面a的高度。又,通过改变(调整)独立升降架231和234的基架237与独立升降架232和235的基架237之间的位置关系(高度关系),可以改变(调整)第一奖品载置面a的倾斜角度。
[0125]
此外,可以通过相对于整体升降架220升降独立升降架233、236来调整第二奖品载置面b的高度。此外,通过改变(调整)楼层框架ff在小型楼层框架ffs上的固定位置,可以改变(调整)第二奖品载置面b的倾斜角度。
[0126]
由此,能够调整第一奖品载置面a与第二奖品载置面b的相对位置关系(高度关系)。
[0127]
通过使整体升降架220相对于基础框架升降,可以在保持第一奖品载置面a与第二奖品载置面b的相对位置关系(高度关系)的状态下,一并调整奖品抓取部500与各奖品载置面的相对位置关系(高度关系)。
[0128]
第一示例所涉及的奖品布置机构30在游戏区域ge中形成奖品布置区域ae和开口区域oe。即,在游戏区域ge中,在一对奖品载置面a、b上形成奖品布置区域ae,在一对奖品载置面a、b之间形成开口区域oe。
[0129]
尤其,在游戏区域ge中,奖品p可以布置成桥接在一对奖品载置面a、b之间。
[0130]
在第一示例所涉及的奖品布置机构30中,使用奖品抓取部500将被一对奖品载置面a、b支撑的奖品p掉落到开口区域oe中,使得奖品p能够被获取到。
[0131]
[第二示例所涉及的奖品布置机构30]
[0132]
接着,说明第二示例所涉及的奖品布置机构30。
[0133]
如图3所示,在第二示例所涉及的奖品布置机构30中,一个楼层框架ff桥接在左框架单元221和右框架单元222之间。
[0134]
具体地,配置在左框架单元221上的三组独立升降架231至233当中,独立升降架232的基架237和独立升降架233的基架237上装接有构成楼层框架ff的一对纵框架中的一个纵框架。另外,配置在右侧框架单元222上的三组独立升降架234至236之中、独立升降架235的基架237和独立升降架236的基架237上装接有构成楼层框架ff的一对纵框架中的另一个纵框架。
[0135]
此时,独立升降架233和236的基架237配置在低于独立升降架232和235的基架237的位置。由此,楼层框架ff被配置成其上表面朝向里侧倾斜的状态。
[0136]
此外,构成楼层框架ff的前侧的横框架上装接有两个球体部件333。各个球形部件333通过t形槽螺母固定到设置在横框架的侧面上的t形槽tg中。
[0137]
这里,在第二示例的奖品布置机构30中,通过改变(调整)独立升降架232、235的基架237与独立升降架233、236的基架237的位置关系(高度关系),可以改变(调整)各个球体部件333的倾斜角度。
[0138]
通过使整体升降框架220相对于基础框架升降,可以在保持各个球体部件333的倾斜角度不变的状态下,一并调整奖品抓取部500与各个球体部件333之间的相对位置关系
(高度关系)。
[0139]
即,在通过独立升降锁定机构239锁定独立升降架231至236相对于整体升降架220的升降的状态下,使整体升降架220可相对于基础框架升降。
[0140]
第二示例所涉及的奖品布置机构30在游戏区域ge中形成奖品布置区域ae和开口区域oe。即,在各个球体部件333的球体部中设置有奖品悬挂部件c、d。在各个奖品悬挂部件c、d中,可以用d形环dr悬挂奖品p。由此,在奖品悬挂部件c、d的下方形成奖品布置区域ae。在各个奖品悬挂部件c、d悬挂的奖品p的下方形成开口区域oe。
[0141]
尤其,在游戏区域ge中,奖品p可以布置成悬挂在开口区域oe的上方的状态。
[0142]
在第二示例所涉及的奖品布置机构30中,可以通过奖品抓取部500将挂在奖品悬挂部件c、d上的d形环dr从奖品悬挂部件c、d脱下来,从而实现连接在该d形环dr上的奖品p的获取。
[0143]
[抓吊单元40]
[0144]
接着,说明抓吊单元40的构成。
[0145]
抓吊单元40包括奖品抓取部500、用于在水平方向上移动奖品抓取部500的移动装置420、以及用于升降奖品抓取部500的升降装置430。
[0146]
移动装置420包括x方向导轨(未图示)、y方向导轨(未图示)、x方向电机m2(参照图9)和y方向电机m3(参照图9)。
[0147]
x方向导轨装接在框体10的顶面(内侧)。x方向导轨沿左右方向直线地延伸。
[0148]
y方向导轨被装接到x方向导轨上。y方向导轨可沿x方向导轨滑动。y方向导轨沿深度方向线性地延伸。可以通过x方向电机m2来驱动y方向导轨沿x方向导轨移动。
[0149]
升降装置430装接在y方向导轨上。升降装置430可沿y方向导轨滑动。可以通过y方向电机m3来驱动升降装置430沿y方向导轨移动。
[0150]
升降装置430包括能够馈送或卷绕线材的卷轴(未图示)和用于驱动卷轴的升降电机m4(参照图9)。线材的端部装接到奖品抓取部500上。由此,可以通过升降电机m4来驱动卷轴馈送出线材,使奖品抓取部500下降。此外,可以通过升降电机m4来驱动卷轴卷绕线材,使奖品抓取部500上升。
[0151]
如上所述,抓吊单元40可以通过各个电机m2、m3和m4来驱动奖品抓取部500在左右方向、深度方向和上下方向上移动。此外,通过开合电机m1的驱动,能够使一对吊臂560开合。
[0152]
[奖品抓取部500]
[0153]
接着,对奖品抓取部500的构成进行说明。
[0154]
图4是示出对应“两爪规格”的奖品抓取部500的构成的立体图。图5是示出吊臂单元520的正面一侧的立体图。图6是示出吊臂单元520的背面一侧的立体图。图7是吊臂单元520的分解立体图。图8是示出了对应“三爪规格”的奖品抓取部500的构成的立体图。
[0155]
奖品抓取部500通过伸缩自如的支撑部413装接到升降装置430的底面上。
[0156]
如图4所示,对应“两爪规格”的奖品抓取部500包括吊爪盒501(参照图1)、基础构件510、一对吊臂单元520和吊爪基板530。
[0157]
吊爪盒501是大致圆柱形的盒体。基础构件510、一对吊臂单元520和吊爪基板530容纳在吊爪盒501中。此时,各吊臂单元520的吊臂560的末端一侧通过设置在吊爪盒501的
侧面上的通孔突出到吊爪盒501的外部。
[0158]
基础构件510由不锈钢等金属板材制成。基础构件510也可以由树脂制成。基础构件510的上面上连接有支撑部413的下端部,同时连接有从升降装置430的卷轴延伸出来的线材的下端部。由此,可以响应于升降装置430的线材的馈送或卷绕来使基础构件510(奖品抓取部500)升降。
[0159]
一对吊臂单元520装接在基础构件510的下面一侧上。一对吊臂单元520具有彼此相同的结构。
[0160]
如图5至图7所示,各吊臂单元520包括基部构件590、开合电机m1、动力传输单元540、吊臂保持部550、吊臂560、吊臂类型识别基板570和电位计580。
[0161]
具体地,各吊臂单元520是通过将基部构件590、开合电机m1、动力传输单元540、吊臂保持部550、吊臂560、吊臂类型识别基板570、电位计580等单元化(一体化)而构成。由此,各吊臂单元520作为一个单元(一个整体)而相对于基础构件510可装卸。
[0162]
基部构件590由不锈钢等金属板材制成。
[0163]
开合电机m1装接在动力传输单元540上。在本实施方式中,使用步进电机作为开合电机m1。开合电机m1的驱动由吊爪基板530控制。
[0164]
动力传输单元540装接在基部构件590的正面一侧。动力传输单元540包括动力传输机构(未图示)和收纳该动力传输机构的变速箱542,动力传输机构将开合电机m1的动力传输至吊臂保持部550(旋转轴551)。动力传输机构由多个齿轮组成。具体地,动力传输单元540是通过将动力传输机构和变速箱542单元化(一体化)而构成。由此,动力传输单元540作为一个单元(一个整体)而相对于基部构件590可装卸。
[0165]
吊臂保持部550通过旋转轴551装接到动力传输单元540。吊臂保持部550设置有安装部552,吊臂560的基端部安装在安装部552上。安装部552形成为方筒状,可插入(嵌合)吊臂560的基端部。另外,吊臂保持部550设置有锁定机构553,用于锁定安装在安装部552上的吊臂560的基端部。
[0166]
锁定机构553包括形成为圆柱状的操作杆553a和设置在操作杆553a下端的接合件(未图示)。锁定机构553设置成使得操作杆553a在上下方向上穿过安装部552。此时,接合件设置在安装部552的内部。
[0167]
当将吊臂560安装到吊臂保持部550上时,吊臂560的基端部插入到安装部552内。则,锁定机构553的接合件与设置在吊臂560的基端部上的接合孔(未图示)接合。由此,吊臂560的基端部在嵌合到安装部552的状态下被锁定(固定),并且吊臂560被安装到吊臂保持部550上。即,吊臂560保持在吊臂保持部550上。
[0168]
另一方面,当从吊臂保持部550移除吊臂560时,向下推动操作杆553a的上端部。则,锁定机构553的接合件从设置在吊臂560的基端部上的接合孔释放。由此,通过向下推动操作杆553a的上端部,同时从吊臂保持部550拔掉吊臂560的基端部,则能够从吊臂保持部550移除吊臂560。
[0169]
吊臂保持部550上设置有插通孔554,用于供旋转轴551插通。吊臂保持部550能够在从闭合极限位置(未图示)到打开极限位置(参照图4)的范围内以旋转轴551为中心位移(旋转)。由此,能夠使安装在吊臂保持部550上的吊臂560可与吊臂保持部550的位移(旋转)相应地、在从闭合极限位置(未图示)到打开极限位置(参照图4)的范围内位移。
[0170]
此时,在奖品抓取部500中,当一对吊臂保持部550向闭合极限位置一侧位移时,一对吊臂560向闭合方向位移。另一方面,当一对吊臂保持部550向打开极限位置一侧位移时,一对吊臂560向打开方向位移。
[0171]
吊臂560形成为大致l形的杆状。吊臂560的形状可以适当变更为例如弧形、波浪形、平板形、钩形等。金属制的爪部件561装接在吊臂560的下端部上。
[0172]
在本实施方式中,备有大小、长度、爪部件561的形状等不同的多种类型的吊臂560。例如,作为多种类型的吊臂560,备有小型吊臂560a、中型吊臂560b和大型吊臂560c。可以任意选择多种类型的吊臂560中的任一种安装到吊臂保持部550上。
[0173]
具体地,如图7所示,吊臂560的基端部上设置有吊臂类型识别部562。吊臂类型识别部562包括平行设置的一对识别基板562a。一对识别基板562a具有彼此相同的结构。各识别基板562a上设有4个识别部s1至s4。可以根据在各吊臂560上的4个识别部s1至s4中形成有通孔的识别部s1至s4的组合(pattern,图案)来识别该吊臂560的类型。
[0174]
即,在各吊臂560中,4个识别部s1至s4中形成有通孔的识别部的组合是与该吊臂560的类型相对应的组合。换言之,根据吊臂560的类型不同,4个识别部s1至s4中形成有通孔的识别部的组合是不同的。例如,在小型吊臂560a中,4个识别部s1至s4中的识别部s1上形成有通孔,而识别部s2至s4上没有形成通孔。在中型吊臂560b中,4个识别部s1至s4中的识别部s1和s2上形成有通孔,而识别部s3和s4上没有形成通孔。又,在大型吊臂560c中,4个识别部s1至s4中的识别部s1至s3上形成有通孔,识别部s4没有形成通孔。
[0175]
吊臂类型识别基板570装接在基部构件590的背面一侧。吊臂类型识别基板570包括吊臂类型检测传感器(未图示)。
[0176]
吊臂类型检测传感器包括4套光传感器(反射式光传感器)。具体地,吊臂类型检测传感器包括与识别部s1对应的光传感器、与识别部s2对应的光传感器、与识别部s3对应的光传感器和与识别部s4对应的光传感器。对应于识别部s1的光传感器包括向识别部s1照射红外光的发光元件和接收来自识别部s1的反射光的受光元件。对应于识别部s2的光传感器包括向识别部s2照射红外光的发光元件和接收来自识别部s2的反射光的受光元件。对应于识别部s3的光传感器包括向识别部s3照射红外光的发光元件和接收来自识别部s3的反射光的受光元件。对应于识别部s4的光传感器包括向识别部s4照射红外光的发光元件和接收来自识别部s4的反射光的受光元件。
[0177]
这里,在基部构件590的背面上设有通孔n1至n4,用于从各光传感器的发光部照射出来的红外光通过。另外,在吊臂保持部550的各个侧面上设有通孔h1至h4,用于从各光传感器的发光部照射出来的红外光通过。
[0178]
在吊臂560装接到吊臂保持部550的状态下,通孔h1设置在与识别部s1相对应的位置。在吊臂560装接到吊臂保持部550的状态下,通孔h2设置在与识别部s2相对应的的位置。在吊臂560装接到吊臂保持部550的状态下,通孔h3设置在与识别部s3相对应的的位置。在吊臂560装接到吊臂保持部550的状态下,通孔h4设置在与识别部s4相对应的的位置。
[0179]
如后所述,在本实施方式中,在吊臂保持部550配置在打开极限位置的状态(吊臂560位于打开极限位置的状态)下,判定安装在吊臂保持部550上的吊臂560的类型。由此,在吊臂保持部550位于打开极限位置的状态下,通孔n1位于与识别部s1(通孔h1)相对应的位置。在吊臂保持部550位于打开极限位置的状态下,通孔n2位于与识别部s2(通孔h2)相对应
的位置。在吊臂保持部550位于打开极限位置的状态下,通孔n3位于与识别部s3(通孔h3)相对应的位置。在吊臂保持部550位于打开极限位置的状态下,通孔n4位于与识别部s4(通孔h4)相对应的位置。
[0180]
通过如上的设置,在吊臂保持部550位于打开极限位置的状态下,从各光传感器的发光元件照射出来的红外光穿过通孔n1至n4和通孔h1至h4到达与该光传感器对应的识别部s1至s4。此时,该识别部s1至s4上没有形成通孔时,到达该识别部s1至s4的红外光被该识别部s1至s4反射,其反射光被该光传感器的受光元件接收到。另一方面,该识别部s1至s4中形成有通孔时,到达该识别部s1至s4的红外光穿过该识别部s1至s4并被动力传输单元540的背面反射,其反射光被该光传感器的受光元件接收到。
[0181]
具体地,在本实施方式中,构成吊臂类型识别部562的材料与动力传输单元540的背面相比具有更高的红外光反射率。由此,在各光传感器中,根据受光元件接收到的反射光相对于由发光元件照射的红外光的反射率来判定(检测)与该光传感器对应的识别部s1至s4是否具有通孔。
[0182]
即,来自各光传感器的受光元件的检测信号被输入到吊爪基板530。吊爪基板530的处理部则基于从各光传感器的受光元件输入的检测信号,判定与该光传感器对应的识别部s1至s4上是否形成有通孔。此时,当从各光传感器的受光元件输入的检测信号的电流值为预定的阈值以上时(与该光传感器对应的识别部s1至s4的反射率高时),吊爪基板530的处理部则判定与该光传感器对应的识别部s1至s4上没有形成通孔。另一方面,当从各光传感器的受光元件输入的检测信号的电流值小于预定的阈值时(与该光传感器对应的识别部s1至s4的反射率低时),吊爪基板530的处理部则判定与该光传感器对应的识别部s1至s4上形成有通孔。
[0183]
即,吊爪基板530的处理部基于从与识别部s1对应的光传感器的受光元件输入的检测信号,来判定识别部s1上是否形成有通孔。又,基于从与识别部s2对应的光传感器的受光元件输入的检测信号,来判定识别部s2上是否形成有通孔。又,基于从与识别部s3对应的光传感器的受光元件输入的检测信号,来判定识别部s3上是否形成有通孔。又,基于从与识别部s4对应的光传感器的受光元件输入的检测信号,来判定识别部s4上是否形成有通孔。
[0184]
并且,吊爪基板530的处理部基于在4个识别部s1至s4中形成有通孔的识别部s1至s4的组合(图案),来判定(检测)吊臂560是否安装在吊臂保持部550上、以及安装在吊臂保持部550上的吊臂560的类型。此时,当判定为所有识别部s1至s4上均形成有通孔时,则判定吊臂保持部550上没有安装吊臂560。另一方面,当判定在4个识别部s1至s4中识别部s1上形成有通孔且识别部s2至s4上没有形成通孔时,则判定安装在吊臂保持部550上的吊臂560的类型为小型吊臂560a。另一方面,当判定在4个识别部s1至s4中识别部s1、s2上形成有通孔且识别部s3、s4上没有形成通孔时,则判定安装在吊臂保持部550上的吊臂560的类型为中型吊臂560b。又,当判定在4个识别部s1至s4中识别部s1至s3上形成有通孔且识别部s4上没有形成通孔时,则判定安装在吊臂保持部550上的吊臂560的类型为大型吊臂560c。
[0185]
电位计580装接在动力传输单元540的正面一侧。电位计580由可变电阻构成。电位计580检测吊臂保持部550(吊臂560)的位置,例如旋转位置或旋转角度。即,电位计580将与旋转轴551的位置(旋转位置或旋转角度)相应的检测信号输出到吊爪基板530。吊爪基板530的处理部根据从各电位计580输入的检测信号,检测与该电位计580对应的吊臂保持部
550(吊臂560)的位置(旋转位置或旋转角度)。.
[0186]
在吊臂单元520中,开合电机m1的动力通过动力传输单元540的动力传输机构传输至插在吊臂保持部550的插通孔554中的旋转轴551上。由此,可以通过驱动开合电机m1使吊臂560位移。此时,可以通过电位计580检测吊臂560的位置(开合位置)。
[0187]
吊爪基板530装接在基础构件510的背面一侧。吊爪基板530包括处理部(未图示)。处理部由微型计算机构成,该微型计算机构成为包含有cpu(中央处理部,central processing unit)、rom(只读存储器,read only memory)、ram(随机存取存储器,random access memory)等。
[0188]
吊爪基板530最多可以控制三个电机的驱动。本实施方式所涉及的吊爪基板530可以通过控制一个吊臂单元520的开合电机m1和另一个吊臂单元520的开合电机m1的驱动来控制一对吊臂560的开合。奖品抓取部500则可以通过一对吊臂560的开合来抓取或释放奖品p。
[0189]
在本实施方式中,基础构件510构成为可装接两组吊臂单元520。然而,基础构件510也可以构成为可装接三组以上的吊臂单元520。
[0190]
即,在本实施方式中,基础构件510构成为“两爪规格”,也即通过两个吊臂560来抓取奖品p。然而,基础构件510也可以构成为“三爪规格”,即通过三个吊臂560来抓取奖品p。
[0191]
此时,在奖品抓取部500中,各吊臂单元520被单元化(一体化),作为一个单元(一个整体)相对于基础构件510可装卸。另外,吊爪基板530可以控制最多三个电机的驱动。由此,在设置有奖品获取游戏装置1的设施中,仅通过更换基础构件510并增加一个吊臂单元520,即可将奖品抓取部500从“两爪规格”变更为“三爪规格”。由此,能够实现奖品抓取部500的结构的一元化,从而减少设计工时和控制工时。
[0192]
即,在将奖品抓取部500从“两爪规格”变更为“三爪规格”时,首先,将两组吊臂单元520和吊爪基板530从基础构件510卸掉。接着,在支撑部413的下端部装接对应“三爪规格”的基础构件610来替换对应“两爪规格”的基础构件510。接着,将从基础构件510卸掉的两组吊臂单元520和新增加的一组吊臂单元520装接到基础构件610上。接着,将从基础构件510卸掉的吊爪基板530装接到基础构件610。
[0193]
由此,如图8所示,可构成对应“三爪规格”的奖品抓取部500。
[0194]
这里,各吊臂单元520相对于基础构件510、610的装接优选为一触式装接。由此,能够使得各吊臂单元520相对于基础构件510、610的拆卸、装接及更换更为容易。
[0195]
[控制系统的构成]
[0196]
接着,说明奖品获取游戏装置1的控制系统的构成。
[0197]
图9是示出奖品获取游戏装置1的控制系统的构成的方框图。
[0198]
如图9所示,奖品获取游戏装置1包括主控制基板50、驱动基板60、吊爪基板530和吊臂类型识别基板570。
[0199]
主控制基板50综合控制奖品获取游戏的进程。主控制基板50配置在下框体12内。主控制基板50包括处理部51、存储部52、通信部53、实时时钟54等。
[0200]
处理部51由包含cpu、rom、ram等的微型计算机构成。
[0201]
处理部51基于从控制面板13输入的各种检测信号、存储在存储部52中的程序或数据等,执行用于进行奖品获取游戏所需的处理。进一步地,处理部51基于从触摸面板15a输
入的各种检测信号、从通信部53接收的各种信息、存储部52中存储的程序或数据等,执行与奖品获取游戏装置1的各种设定相关的处理。具体地,处理部51与奖品获取游戏的进程相应地向驱动基板60、吊爪基板530等发送各种控制指令。
[0202]
响应于各个操作按钮16a、16b的按下操作而输出的检测信号、响应于触摸面板15a的操作而输出的检测信号、响应于投币口14有硬币投入而输出的检测信号、以及响应于奖品获取传感器17a检测到奖品p而输出的检测信号被输入到处理部51。
[0203]
存储部52由非易失性存储器等构成。存储部52中存储有用于进行奖品获取游戏或奖品获取游戏装置1的各种设定等所需的程序或数据。
[0204]
通信部53经由网络(未图示)与外部终端设备(未图示)进行通信。
[0205]
实时时钟54生成(计时)表示当前时间(年、月、周、日、时、分、秒)的信息。实时时钟54从备用电源接收电源供给来动作。从而,即使在奖品获取游戏装置1没有开启电源的期间,实时时钟54也不间断地计测当前时间。
[0206]
驱动基板60通过控制x方向电机m2、y方向电机m3和升降电机m4的驱动来控制奖品抓取部500的移动(x方向的移动、y方向的移动、z方向的移动)。
[0207]
驱动基板60设置在框体10的顶面(内侧)上。驱动基板60包括处理部等。驱动基板60的处理部由包含cpu、rom、ram等的微型计算机构成。驱动基板60的rom中存储有用于控制奖品抓取部500的移动所需的程序或数据。
[0208]
这里,奖品获取游戏装置1中设置有用于检测奖品抓取部500的x方向(左右方向)的位置的x位置检测单元55、用于检测奖品抓取部500的y方向(深度方向)的位置的y位置检测单元56、以及用于检测奖品抓取部500的z方向(上下方向)的位置的z位置检测单元57等。
[0209]
从主控制基板50发送的控制指令、x位置检测单元55输出的检测信号、y位置检测单元56输出的检测信号和z位置检测单元57输出的检测信号等被输入到驱动基板60的处理部。另外,后述的吊臂类型信息被输入到驱动基板60的处理部。
[0210]
驱动基板60的处理部根据从吊爪基板530接收到的吊臂类型信息,设定奖品抓取部500在x方向上的可移动范围(x方向上一单向的移动限制位置和x方向上另一单向的移动限制位置)。
[0211]
即,根据由吊臂类型信息所指定的安装在一个吊臂单元520上的吊臂560的类型来设定x方向上一单向的移动限制位置。另外,根据由吊臂类型信息所指定的安装在另一个吊臂单元520上的吊臂560的类型来设定x方向上另一单向的移动限制位置。此时,移动限制位置被设定为使得安装在各吊臂单元520上的吊臂560不与框体10的侧面相接触(碰撞)。
[0212]
如上所述,根据由吊臂类型信息指定的吊臂560的大小来设定奖品抓取部500在x方向上的可移动范围。即,所安装的吊臂560越大(越长),可移动范围被设定得越窄。
[0213]
进一步地,驱动基板60的处理部根据从主控制基板50接收到的控制指令、从x位置检测单元55输入的检测信号、预先设定的奖品抓取部500在x方向上的可移动范围等来控制x方向电机m2的驱动(奖品抓取部500在x方向上的移动)。
[0214]
进一步地,驱动基板60的处理部根据从主控制基板50接收到的控制指令、从y位置检测单元56输入的检测信号、预先设定的奖品抓取部500在y方向上的可移动范围等来控制y方向电机m3的驱动(奖品抓取部500在y方向上的移动)。
[0215]
又,驱动基板60的处理部根据从主控制基板50接收到的控制指令、从z位置检测单
元57输入的检测信号、预先设定的奖品抓取部500在z方向上的可移动范围等来控制升降电机m4的驱动(奖品抓取部500在z方向上的移动)。
[0216]
吊爪基板530通过控制一个吊臂单元520的开合电机m1和另一个吊臂单元520的开合电机m1的驱动来控制一对吊臂560的开合和抓取力。
[0217]
吊爪基板530配置在吊爪盒501内。吊爪基板530包括处理部等。吊爪基板530的处理部由包含cpu、rom、ram等的微型计算机构成。吊爪基板530的rom中存储有用于控制一对吊臂560的开合所需的程序或数据。
[0218]
吊爪基板530的处理部输入从主控制基板50发送的控制指令、从一个吊臂单元520的电位计580输出的检测信号、从另一吊臂单元520的电位计580输出的检测信号、来自一个吊臂单元520的吊臂类型识别基板570(4套光传感器的受光元件)的检测信号、以及来自另一吊臂单元520的吊臂类型识别基板570(4套光传感器的受光元件)的检测信号。
[0219]
如上所述,吊爪基板530的处理部根据从各吊臂单元520的吊臂类型识别基板570(4套光传感器的受光元件)输入的检测信号,来判定安装在该吊臂单元520上的吊臂560的类型。
[0220]
当吊爪基板530的处理部在待机状态下检测到任一个吊臂单元520上的吊臂560(吊臂保持部550)发生位移时,则执行校准处理。这里,吊臂560(吊臂保持部550)的位移是基于从电位计580输入的检测信号来检测的。
[0221]
如上所述,各吊臂560(各吊臂保持部550)能够以旋转轴551为中心在从闭合极限位置到打开极限位置的范围内位移(旋转)。此时,在本实施方式中,对于各吊臂560(各吊臂保持部550),可以在从闭合极限位置到打开极限位置的范围内设定一对吊臂560闭合时的闭合位置。并且,当一对吊臂560闭合时,各吊臂560将位移(闭合)到预先设定的闭合位置。而当各吊臂560的闭合位置设定为比闭合极限位置更靠近打开极限位置一侧的位置时,各吊臂560不会位移到闭合极限位置。因此,在本实施方式中,在吊臂560位于打开极限位置的状态(吊臂保持部550配置在打开极限位置的状态)下,判定安装在吊臂保持部550上的吊臂560的类型。由此,可以可靠地判定安装在吊臂保持部550上的吊臂560的类型。
[0222]
在校准处理中,首先,对于各吊臂单元520,将吊臂560(吊臂保持部550)位移到打开极限位置。接着,执行安装在各吊臂单元520上的吊臂560的类型的判定处理。此时,对于各吊臂单元520,根据从吊臂类型识别基板570(4套光传感器的受光元件)输入的检测信号来判定安装在各吊臂单元520上的吊臂560的类型。接着,将吊臂类型信息存储到ram的预定区域内,同时发送到驱动基板60。其中,吊臂类型信息包括用于指定安装在一个吊臂单元520上的吊臂560的类型的信息和用于指定安装在另一个吊臂单元520上的吊臂560的类型的信息。至此,完成校准处理。
[0223]
这里,也可以采用如下方式:根据由吊爪基板530判定的安装在吊臂保持部550上的吊臂560的类型和奖品抓取部500的角度,来相应地设定奖品获取游戏装置1的奖品抓取部500在x方向上的移动限制范围以及在y方向上的移动限制范围。即,根据奖品抓取部500的角度和由吊臂类型信息所指定的安装在一个吊臂单元520上的吊臂560的类型(小型吊臂560a、中型吊臂560b、大型吊臂560c、或未安装吊臂560),来设定安装在该吊臂单元上的吊臂560在x方向上一侧的移动限制范围,使其不会在x方向上一侧与框体10接触(碰撞),同时设定安装在该吊臂单元上的吊臂560在y方向上一侧的移动限制范围,使其不会在y方向上
一侧与框体10接触(碰撞)。又,根据奖品抓取部500的角度和由吊臂类型信息指定的安装在另一个吊臂单元520上的吊臂560的类型(小型吊臂560a、中型吊臂560b、大型吊臂560c、或未安装吊臂560),来设定安装在该另一个吊臂单元上的吊臂560在x方向上另一侧的移动限制范围,使其不会在x方向上另一侧与框体10接触(碰撞),同时设定安装在该另一个吊臂单元上的吊臂560在y方向上另一侧的移动限制范围,使其不会在y方向上另一侧与框体10接触(碰撞)。然后,可以将从x方向上一侧的移动限制位置到x方向上另一侧的移动限制位置的范围定义为x方向的移动限制范围,并将从y方向上一侧的移动限制位置到y方向上另一侧的移动限制位置的范围定义为y方向的移动限制范围。此时,安装在吊臂单元上的吊臂560越大,x方向或y方向上的移动限制范围越窄。由此,可以防止各吊臂560与框体10接触(碰撞)的情况。另外,奖品抓取部500在x方向上的移动范围也可以由操作者来设定到x方向上的移动限制范围之外,并且也可以将奖品抓取部500在y方向上的移动范围设定到y方向上的移动限制范围之外。
[0224]
吊爪基板530的处理部根据从主控制基板50接收的控制指令、从各吊臂单元520的电位计580输入的检测信号、存储在ram中的吊臂类型信息、以及预先设定的吊臂560的抓取力等,控制各开合电机m1的驱动(一对吊臂560的开合以及抓取力)。
[0225]
具体地,吊爪基板530的处理部根据存储在ram中的吊臂类型信息来控制(调整)一对吊臂560的开合及抓取力。此时,无论安装在各吊臂单元520上的吊臂560是何种类型,控制一对吊臂560的开合及抓取力,使其具有恒定的开合速度和恒定的抓取力(预先设定的抓取力)。
[0226]
[游戏处理]
[0227]
接着,说明由处理部51执行的游戏处理。
[0228]
当奖品获取游戏装置1接通电源,处理部51则开始游戏处理。
[0229]
在游戏处理中,首先执行初始设定处理。在初始设定处理中,执行各种初始设定。
[0230]
初始设定处理完成,则接着执行初始操作处理。在初始操作处理中,对抓吊单元40执行初始操作(初始化操作)。“初始操作”用于确认抓吊单元40是否正常动作并确认抓吊单元40是否处于起始位置。在初始操作处理中,用于指定执行初始操作的控制指令被发送到驱动基板60和吊爪基板530。
[0231]
初始操作处理结束,则接着执行待机开始处理。在待机开始处理中,启动奖品获取游戏装置1的待机状态(等待顾客状态)。“待机状态”是奖品获取游戏未在执行中、而可以开始奖品获取游戏的状态。在待机状态期间,由奖品获取游戏装置1执行待机操作。
[0232]
在待机状态期间,监测奖品获取游戏的开始条件是否成立。在本实施方式中,当检测到有硬币投入投币口14,则奖品获取游戏的开始条件成立。
[0233]
当奖品获取游戏的开始条件成立时,待机状态终止而开始奖品获取游戏(游戏状态)。在奖品获取游戏期间,首先,监测来自第一操作按钮16a的检测信号的输入。然后,响应于来自第一操作按钮16a的检测信号的输入,用于指定在x方向上开始移动的控制指令被发送到驱动基板60。由此,开始x方向电机m2的驱动,奖品抓取部500开始沿左右方向的移动。
[0234]
接着,监测来自第一操作按钮16a的检测信号的输入的停止。然后,响应于来自第一操作按钮16a的检测信号的输入的停止,用于指定在x方向上停止移动的控制指令被发送到驱动基板60。由此,停止x方向电机m2的驱动,奖品抓取部500停止沿左右方向的移动。
[0235]
接着,监测来自第二操作按钮16b的检测信号的输入。然后,响应于来自第二操作按钮16b的检测信号的输入,用于指定在y方向上开始移动的控制指令被发送到驱动基板60。由此,开始y方向电机m3的驱动,奖品抓取部500开始沿深度方向的移动。
[0236]
接着,监测来自第二操作按钮16b的检测信号的输入的停止。然后,响应于来自第二操作按钮16b的检测信号的输入的停止,用于指定在z方向上开始移动(下降)的控制指令被发送到驱动基板60。由此,停止y方向电机m3的驱动,奖品抓取部500停止沿深度方向的移动。同时,开始升降电机m4的驱动,奖品抓取部500开始沿上下方向的移动而下降。
[0237]
接着,响应于奖品抓取部500被降低到了预定的高度,用于指定一对吊臂560闭合的控制指令被传送到吊爪基板530。由此,各开合电机m1被驱动,一对吊臂560被闭合。此时,各吊臂560位移(闭合)到预先设定的闭合位置。
[0238]
接着,响应于一对吊臂560完成了闭合,指定在z方向上开始移动(上升)的控制指令被发送到驱动基板60。由此,开始升降电机m4的驱动,奖品抓取部500开始沿上下方向的移动而上升。
[0239]
接着,响应于奖品抓取部500被升高到了预定的高度,用于指定向开口区域oe移动的控制指令被发送到驱动基板60。由此,开始驱动x方向电机m2和y方向电机m3,奖品抓取部500朝向预先设定的开口区域oe移动。
[0240]
接着,响应于奖品抓取部500被移动到了开口区域oe,用于指定一对吊臂560打开的控制指令被发送到吊爪基板530。由此,驱动各开合电机m1,一对吊臂560被打开。此时,各吊臂560位移到打开极限位置(打开)。
[0241]
接着,响应于一对吊臂560完成了打开,指定移动到起始位置的控制指令被发送到驱动基板60。由此,开始x方向电机m2和y方向电机m3的驱动,奖品抓取部500朝向预先设定的起始位置移动。
[0242]
然后,响应于奖品抓取部500移动到了起始位置,此次的奖品获取游戏结束。奖品获取游戏(游戏状态)结束,则转到上述待机开始处理,再次开始待机状态。
[0243]
[奖品获取游戏装置1的动作]
[0244]
在奖品获取游戏装置1中,包括开合电机m1、吊臂保持部550和吊臂560的多个部件被单元化(一体化)而构成吊臂单元520。吊臂单元520作为一个单元,即一个整体相对于基础构件510可装卸。也就是说,吊臂单元520可相对于基础构件510一体装卸。由此,使得吊臂单元520相对于基础构件510的组装和更换变得容易。其结果,可使得奖品抓取部500的组装和部件更换变得容易。
[0245]
另外,奖品获取游戏装置1包括用于控制开合电机m1的驱动的吊爪基板530。吊爪基板530设置在基础构件510上。由此,即使在多个吊臂单元520设置到基础构件510上时,也可以用一个控制基板(吊爪基板530)集中控制多个吊臂单元520所涉及的开合电机m1,不需要为每个吊臂单元520设置控制基板(吊爪基板530)。由此,可以抑制部件数量的增加。
[0246]
又,在奖品获取游戏装置1中,吊臂单元520包括动力传输单元540。在动力传输单元540中,将开合电机m1的动力传输至吊臂保持部550的动力传输机构是单元化结构(一体化结构)。由此,可使得动力传输单元540的组装和更换变得容易。
[0247]
又,在奖品获取游戏装置1中,吊臂单元520包括检测吊臂保持部550的位置(旋转位置或旋转角度)的电位计580。由此,可以一并组装包括开合电机m1、吊臂保持部550、吊臂
560、电位计580在内的多个部件,可使得奖品抓取部500的组装和部件更换变得容易。
[0248]
又,在奖品获取游戏装置1中,吊臂单元520包括用于检测由吊臂保持部550保持的吊臂560的类型的吊臂类型识别基板570。由此,可以一并组装包括开合电机m1、吊臂保持部550、吊臂560和吊臂类型识别基板570在内的多个部件,可使得奖品抓取部500的组装和部件更换变得容易。
[0249]
又,在奖品获取游戏装置1中,吊臂类型识别基板570根据设置在吊臂560上的吊臂类型识别部562的样式(具体地,根据4个识别部s1至s4中形成有通孔的识别部s1至s4的组合(图案)来检测吊臂560的类型。由此,可以通过简单的构造来检测吊臂560的类型。
[0250]
又,在奖品获取游戏装置1中,可以将多个吊臂单元520装接到基础构件510上。由此,能够构成两爪规格、三爪规格等各种规格的奖品抓取部500。
[0251]
[变形例]
[0252]
以上,对本发明的实施方式进行了说明,然而在上述实施方式中可以进行各种变更。
[0253]
例如,在上述实施方式中,基础构件510上装接两组吊臂单元520,来构成对应“两爪规格”的奖品抓取部500。或者,在基础构件610上装接三组吊臂单元520,来构成对应“三爪规格”的奖品抓取部500。
[0254]
然而,也可以是在基础构件510上装接一组吊臂单元520而构成对应“一爪规格”的奖品抓取部500。
[0255]
或者,预备对应“四爪规格”的基础构件,在该基础构件上装接4组吊臂单元520而构成对应“四爪规格”的奖品抓取部500。
[0256]
另外,在上述实施方式中,吊爪基板530的处理部使用4套光传感器来检测4个识别部s1至s4中形成有通孔的识别部s1至s4的组合(图案),并根据检测到的图案,检测吊臂保持部550上是否装接有吊臂560以及装接在吊臂保持部550上的吊臂560的类型。
[0257]
然而,吊爪基板530的处理部也可以构成为根据从物理开关输入的检测信号,来检测吊臂保持部550上是否装接有吊臂560以及装接在吊臂保持部550上的吊臂560的类型。这种情况下,物理开关设置在吊臂保持部550上。物理开关具有能够进行按压操作的操作部,响应于操作部的按压操作,将检测信号发送至吊爪基板530。并在吊臂560的基端部(插入吊臂保持部550内的部分),设置操作突起部,当吊臂560的基端部插入(安装)到吊臂保持部550内部时,通过该操作突起部来按压物理开关的操作部。此时,设置在基端部的操作突起的数量根据吊臂560的种类而不同。例如,小型吊臂560a具有一个操作突起,中型吊臂560b具有两个操作突起,大型吊臂560c具有三个操作突起。由此,当小型吊臂560a装接到吊臂保持部550时,物理开关的操作部被按压一次。而当中型吊臂560b装接到吊臂保持部550时,物理开关的操作部被按压两次。又,当大型吊臂560c装接到吊臂保持部550时,物理开关的操作部被按压三次。吊爪基板530的处理部则在校准处理中根据从物理开关输入的检测信号来检测安装在吊臂保持部550上的吊臂560的类型。此时,当检测到物理开关的操作部没有被按下时,则判定为吊臂保持部550上没有安装吊臂560。另一方面,当检测到物理开关的操作部被按下一次时,判定为吊臂保持部550上安装有小型吊臂560a。又,当检测到物理开关的操作部被按下两次时,判定为吊臂保持部550上安装有中型吊臂560b。当检测到物理开关的操作部被按下三次时,判定为吊臂保持部550上安装有大型吊臂560c。
[0258]
或者,吊爪基板530的处理部也可以根据从颜色传感器输入的检测信号,来检测吊臂保持部550上是否装接有吊臂560以及装接在吊臂保持部550上的吊臂560的类型。在这种情况下,颜色传感器设置在吊臂保持部550上。颜色传感器将与检测到的颜色相对应的检测信号发送到吊爪基板530。并且吊臂560的基端部(插入吊臂保持部550内的部分)具有预定的颜色。此时,基端部所具有的颜色根据吊臂560的各种类型而不同。例如,小型吊臂560a对应“蓝色”,中型吊臂560b对应“红色”,大型吊臂560c对应“黄色”,吊臂保持部550的内面具有“白色”。因此,当吊臂560装接到吊臂保持部550时,颜色传感器检测到吊臂560的基端部的颜色。吊爪基板530的处理部则在校准处理中根据从颜色传感器输入的检测信号来检测安装在吊臂保持部550上的吊臂560的类型。此时,当检测到“白色”时,判定为吊臂保持部550上没有安装吊臂560。另一方面,当检测到“蓝色”时,判定为吊臂保持部550上安装有小型吊臂560a。又,当检测到“红色”时,判定为吊臂保持部550上安装有中型吊臂560b。又,当检测到“黄色”时,判定为吊臂保持部550上安装有大型吊臂560c。
[0259]
或者,吊爪基板530的处理部也可以根据电路的导通或非导通来检测吊臂保持部550上是否装接有吊臂560以及装接在吊臂保持部550上的吊臂560的类型。在这种情况下,吊臂保持部550上设置有三套电路。各电路具有开放的接点部,当接点部闭合时,电信号输出到吊爪基板530。并且在吊臂560的基端部(插入吊臂保持部550内的部分)设置有用于闭合(导通)电路的接点部的导通板。此时,导通板设置成根据吊臂560的各种类型而闭合三套电路中的不同电路的接点部。例如,在小型吊臂560a中,在三套电路中闭合第一电路的接点部的位置设置有导通板。另一方面,在中型吊臂560b中,在三套电路中闭合第二电路的接点部的位置设置有导通板。又,在大型吊臂560c中,在三套电路中闭合第三电路的接点部的位置设置有导通板。由此,当小型吊臂560a安装到吊臂保持部550时,三套电路中只有第一电路导通(接点部闭合)。另一方面,当中型吊臂560b安装到吊臂保持部550时,三套电路中只有第二电路导通(接点部闭合)。又,当大型吊臂560c安装到吊臂保持部550时,三套电路中只有第三电路导通(接点部闭合)。而吊爪基板530的处理部则在校准处理中根据从三套电路输入的电信号来检测安装在吊臂保持部550上的吊臂560的类型。此时,当从所有电路均没有电信号输入(非导通)时,则检测为吊臂保持部550上没有安装吊臂560。另一方面,当仅从三套电路中的第一电路有电信号输入(导通)时,则检测为吊臂保持部550上安装有小型吊臂560a。又,当仅从三套电路中的第二电路有电信号输入(导通)时,则检测为吊臂保持部550上安装有中型吊臂560b。又,当仅从三套电路中的第三电路有电信号输入(导通)时,则检测为吊臂保持部550上安装有大型吊臂560c。
[0260]
另外,在上述实施方式中,吊臂类型识别部562构成为包括平行设置的一对识别基板562a,且一对识别基板562a具有彼此相同的构造。由此,可以根据设置在各识别基板562a上的4个识别部s1至s4中形成有通孔的识别部s1至s4的组合(图案)来识别吊臂560的类型。即,在各识别基板562a中,4个识别部s1至s4中形成有通孔的识别部的组合是对应于该吊臂560的类型的组合。
[0261]
然而,也可以是根据设置在一对识别基板562a上的共计8个识别部中形成有通孔的识别部的组合(图案)来识别吊臂560的类型。即,在一对识别基板562a中,共计8个识别部中形成有通孔的识别部的组合是对应于该吊臂560的类型的组合。通过这样的构成,能够增加可识别的吊臂560的种类,从而能够预备尺寸、形状、爪部件561的形状等不同的各种类型
的吊臂560,实现多样化运营。
[0262]
又,可以适当地组合上述实施方式所涉及的构成以及上述变形例所涉及的构成中的两个以上的构成。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。