1.本技术实施例涉及稳定性预测的技术领域,具体而言,涉及一种黄土滑坡稳定性预测方法、电子设备以及存储介质。
背景技术:
2.随着经济的高速发展,工程建设、农业灌溉和资源开发等人类活动越来越频繁,却也在发展过程中伴随着滑坡地质灾害频发的问题,滑坡地质灾害体现出数量多、分布广、损失大的特点,因此,为了保护人民生命和财产的安全,对滑坡的风险评估与防控显得尤为重要。
3.获取准确可靠的物理力学计算参数是开展滑坡稳定性评价的基本前提条件,目前经过大量的试验研究已经获得了大量用于研究滑坡稳定性的参数,例如滑带土残余强度参数、在不同围压以及剪切速率下饱和重塑黄土的抗剪强度,这些试验成果为黄土滑坡稳定性研究提供了重要的数据支撑,但是室内试验研究不确定因素较多,难以获得原状黄土的物理力学参数。同时,由于尺度效应问题,试验研究成果难以表征真实滑坡灾害的参数特征。
4.根据滑坡灾害观测信息开展参数反分析,为获取可靠的黄土滑坡计算参数提供了一种重要途径,例如利用滑坡前坡体几何和物理参数反演获得非饱和黄土滑坡黏聚力和内摩擦角,基于极限平衡理论通过临界圆弧滑动面的判别,推导出参数反演的显示表达式,并开展了边坡稳定性参数反演分析;基于三维上限分析理论研究了滑坡抗剪强度参数可靠度反分析方法。
5.虽然上述这些研究成果在一定程度上提高了滑坡稳定性计算参数的准确性,但大多只考虑稳定性系数或者变形特征作为约束条件,从而使得反分析的结果的可靠性并不理想,因此,如何提高反分析的参数结果,并利用反分析的参数结果预测滑坡的稳定性是一个亟待解决的问题。
技术实现要素:
6.本技术实施例提供一种黄土滑坡稳定性预测方法、电子设备以及存储介质,旨在获得更可靠的反分析结果,并更准确地预测滑坡的稳定性。
7.第一方面,本技术实施例提供一种黄土滑坡稳定性预测方法,所述方法包括:
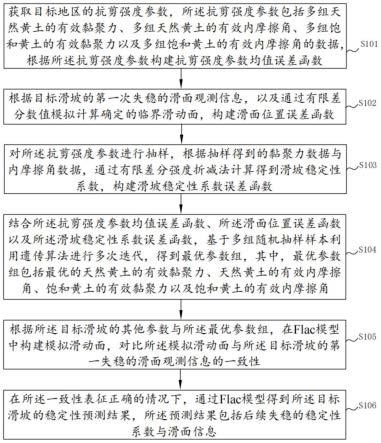
8.获取目标地区的抗剪强度参数,所述抗剪强度参数包括多组天然黄土的有效黏聚力、多组天然黄土的有效内摩擦角、多组饱和黄土的有效黏聚力以及多组饱和黄土的有效内摩擦角的数据,根据所述抗剪强度参数构建抗剪强度参数均值误差函数;
9.根据目标滑坡的第一次失稳的滑面观测信息,以及通过有限差分数值模拟计算确定的临界滑动面,构建滑面位置误差函数;
10.对所述抗剪强度参数进行抽样,根据抽样得到的黏聚力数据与内摩擦角数据,通过有限差分强度折减法计算得到滑坡稳定性系数,构建滑坡稳定性系数误差函数;
11.结合所述抗剪强度参数均值误差函数、所述滑面位置误差函数以及所述滑坡稳定性系数误差函数,基于多组随机抽样样本利用遗传算法进行多次迭代,得到最优参数组,其中,最优参数组包括最优的天然黄土的有效黏聚力、天然黄土的有效内摩擦角、饱和黄土的有效黏聚力以及饱和黄土的有效内摩擦角;
12.根据所述目标滑坡的其他参数与所述最优参数组,在flac模型中构建模拟滑动面,对比所述模拟滑动面与所述目标滑坡的第一失稳的滑面观测信息的一致性;
13.在所述一致性表征正确的情况下,通过flac模型得到所述目标滑坡的稳定性预测结果,所述预测结果包括后续失稳的稳定性系数与滑面信息。
14.可选地,根据所述抗剪强度参数构建抗剪强度参数均值误差函数,包括:
15.分别计算多组天然黄土的有效黏聚力、多组天然黄土的有效内摩擦角、多组饱和黄土的有效黏聚力以及多组饱和黄土的有效内摩擦角各自的均值与标准差,并假设均值与标准差服从正态分布;
16.根据计算得到的均值与标准差,构建抗剪强度参数均值误差函数。
17.可选地,构建的所述抗剪强度参数均值误差函数为:
[0018][0019]
式中,x为抗剪强度参数向量,μ
x
为各参数的均值,表示各参数的协方差矩阵的逆矩阵,t表示矩阵转置。
[0020]
可选地,根据目标滑坡第一次失稳的滑面观测信息,以及通过有限差分数值模拟计算确定的临界滑动面,构建滑面位置误差函数,包括:
[0021]
根据目标滑坡第一次失稳的滑面观测信息,选取第一次失稳的滑面上的多个特征坐标点;
[0022]
通过多次有限差分数值模拟计算确定多个临界滑动面,分别在每个所述临界滑面上获取多个特征坐标点;
[0023]
根据所述第一次失稳的滑面上的多个特征坐标点与每个所述临界滑面上的多个特征坐标点,构建滑面位置误差函数。
[0024]
可选地,根据目标滑坡第一次失稳的滑面观测信息,以及通过有限差分数值模拟计算确定的临界滑动面,构建滑面位置误差函数,包括:
[0025]
根据目标滑坡第一次失稳的滑面观测信息,选取第一次失稳的滑面上的5个特征坐标点,记为(ai,bi),其中,i=1,2,3,4,5;
[0026]
通过多次有限差分数值模拟计算确定多个临界滑动面,获取每个临界滑面上的5个特征坐标点,记为(xi,yi),其中,i=1,2,3,4,5;
[0027]
根据第一次失稳的滑面上的5个特征坐标点与临界滑面上的5个特征坐标点,构建的滑面位置误差函数为:
[0028][0029]
可选地,对所述抗剪强度参数进行抽样,根据抽样得到的黏聚力数据与内摩擦角数据,通过有限差分强度折减法计算得到滑坡稳定性系数,构建滑坡稳定性系数误差函数,包括:
[0030]
对所述抗剪强度参数进行抽样,根据抽样得到的黏聚力数据与内摩擦角数据,通过有限差分强度折减法计算得到滑坡稳定性系数;
[0031]
假设所述目标滑坡失稳时的稳定性系数为1;
[0032]
构建的滑坡稳定性系数误差函数为:
[0033]
f3(x)=(fs(x)-1)
[0034]
式中,fs为有限差分强度折减法计算得到滑坡稳定性系数。
[0035]
第二方面,本技术实施例提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现实施例第一方面所述的方法。
[0036]
第三方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现实施例第一方面所述的方法。
[0037]
有益效果:
[0038]
通过构建三个函数,即抗剪强度参数均值误差函数、滑面位置误差函数以及滑坡稳定性系数误差函数,并结合遗传算法,对多组随机抽样样本进行迭代计算,从而得到最优参数组,最优参数组包括最优的天然黄土的有效黏聚力、天然黄土的有效内摩擦角、饱和黄土的有效黏聚力以及饱和黄土的有效内摩擦角;然后利用最优参数组据以及目标滑坡的其他参数,在flac模型中构建模拟滑动面,对比模拟滑动面与目标滑坡实际的第一失稳的滑面观测信息的一致性,在所述一致性表征正确的情况下,通过flac模型得到目标滑坡的稳定性预测结果,预测结果包括后续失稳的稳定性系数与滑面信息。
[0039]
本方法考虑到滑坡的第一次失稳时的滑面观测信息、抗剪强度参数信息以及稳定性系数,通过设置三个函数对反分析设定更多的优化约束条件,可以获得更加可靠的反分析结果,进而可以对目标滑坡的稳定性状态和临界滑面进行有效预测。
附图说明
[0040]
为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0041]
图1是本技术一实施例提出的黄土滑坡稳定性预测方法的步骤流程图;
[0042]
图2是本技术一实施例提出的已失稳的目标滑坡的滑面示意图;
[0043]
图3是本技术一实施例提出的反分析过程的流程图;
[0044]
图4是本技术一实施例提出的滑坡纵剖面图;
[0045]
图5是本技术一实施例提出的党川2#滑坡未发生滑坡时的模拟结果;
[0046]
图6是本技术一实施例提出的遗传算法的收敛情况示意图;
[0047]
图7是本技术一实施例提出的pareto多目标优化结果示意图;
[0048]
图8是本技术一实施例提出的第一次失稳中模拟滑动面与实际滑动面的对比示意图;
[0049]
图9是本技术一实施例提出的第二次失稳中预测滑动面的示意图;
[0050]
图10(a)是本技术一实施例提出的第二次失稳的第一轮模拟获得的失稳范围示意
图;
[0051]
图10(b)是本技术一实施例提出的第二次失稳的第二轮模拟获得的失稳范围示意图;
[0052]
图10(c)是本技术一实施例提出的第二次失稳的第三轮模拟获得的失稳范围示意图。
具体实施方式
[0053]
下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0054]
为了保护人民生命和财产的安全,对滑坡的风险评估与防控显得尤为重要,本技术为了获得更加可靠的反分析结果,进而对滑坡的稳定性状态和临界滑面进行有效预测,提出了一种黄土滑坡稳定性预测方法。
[0055]
参照图1,示出了本发明实施例中的一种黄土滑坡稳定性预测方法的步骤流程图,如图1,所述方法包括以下步骤:
[0056]
s101、获取目标地区的抗剪强度参数,所述抗剪强度参数包括多组天然黄土的有效黏聚力、多组天然黄土的有效内摩擦角、多组饱和黄土的有效黏聚力以及多组饱和黄土的有效内摩擦角的数据,根据所述抗剪强度参数构建抗剪强度参数均值误差函数。
[0057]
首先,获取进行反分析和稳定性预测的滑坡所在的地区的抗剪强度参数,包括多组天然黄土的有效黏聚力、多组天然黄土的有效内摩擦角、多组饱和黄土的有效黏聚力以及多组饱和黄土的有效内摩擦角的数据,获取的途径本技术中不作限制,示例地,可以通过查阅文献收集获取27组天然黄土的有效黏聚力,27组天然黄土的有效内摩擦角、18组饱和黄土的有效黏聚力以及18组饱和黄土的有效内摩擦角,获取得到的抗剪强度参数构成一个数据集。
[0058]
在一种实施方式中,本实施例还提供一种构建抗剪强度参数均值误差函数的方法,包括:
[0059]
分别计算多组天然黄土的有效黏聚力、多组天然黄土的有效内摩擦角、多组饱和黄土的有效黏聚力以及多组饱和黄土的有效内摩擦角各自的均值与标准差;
[0060]
根据计算得到的均值与标准差,构建抗剪强度参数均值误差函数;
[0061]
示例地,构建的所述抗剪强度参数均值误差函数为:
[0062][0063]
式中,x为抗剪强度参数向量,μ
x
为各参数的均值,表示各参数的协方差矩阵的逆矩阵,t表示矩阵转置。
[0064]
由于抗剪强度参数中包括上述的4个参数,且每个参数的均值的影响各不相同,因此还可以使用无偏差模型降低各参数的均值的影响。
[0065]
s102、根据目标滑坡的第一次失稳的滑面观测信息,以及通过有限差分数值模拟计算确定的临界滑动面,构建滑面位置误差函数。
[0066]
在一种可行的实施方式中,本步骤可以包括以下步骤:
[0067]
s1:根据目标滑坡的第一次失稳的滑面观测信息,选取第一次失稳的滑面上的多个特征坐标点;
[0068]
s2:通过多次有限差分数值模拟计算确定多个临界滑动面,分别在每个所述临界滑面上获取多个特征坐标点;
[0069]
本步骤中,根据遗传算法每次迭代过程中多组参数数据,进行多次有限差分数值模拟计算得到多个临界滑动面,然后在每个临界滑动面上获取多个特征坐标点,在每个临界滑动面上获取的特征坐标点的个数与第一次失稳的滑面上的特征坐标点的个数相同。
[0070]
s3:根据所述第一次失稳的滑面上的多个特征坐标点与所述临界滑面上的多个特征坐标点,构建滑面位置误差函数。
[0071]
参照图2,示出了已失稳的目标滑坡的滑面示意图,示例地,在实际实施过程中,根据目标滑坡的第一次失稳的滑面观测信息,将滑面在x方向等分为四段,可以获得5个特征坐标点记为(ai,bi),其中,i=1,2,3,4,5,将这5个坐标点的位置信息作为实际滑面的位置信息;其中,最左侧的特征坐标点为剪出口位置,最右侧的特征坐标点为后缘拉裂缝位置。
[0072]
通过多次有限差分数值模拟计算确定多个临界滑动面,对每个临界滑面分别选取5个特征坐标点,记为(xi,yi),其中,i=1,2,3,4,5。
[0073]
然后根据第一次失稳的滑面上的5个特征坐标点与临界滑面上的5个特征坐标点,构建的滑面位置误差函数为:
[0074][0075]
在其他实施方式中,还可以对i设置其他的数值。
[0076]
本实施例通过flac提取临界滑动面,具体地,为获得给定参数条件下黄土滑坡的临界滑面,通过flac内置fish语言编程提取单元节点位移信息,导入到matlab中使用k-means聚类算法识别滑动的单元体,从而实现临界滑动面的提取。
[0077]
k-means算法的目标是将n个对象,依据对象间的相似性聚集到指定的k个类簇中,每个对象属于且仅属于一个其到类簇中心距离最小的类簇中。每一个对象到每一个聚类中心的欧式距离如下式所示:
[0078][0079]
式中,ai表示第i个对象,cj表示第j个聚类中心;a
i,t
表示第i个对象的第t个属性,c
j,t
表示第j个聚类中心的第t个属性,t=1,2,
…
,m。
[0080]
依次比较每一个对象到每一个聚类中心的距离,将对象分配到距离最近的聚类中心的类簇中,得到k个类簇{s1,s2,
…
,sk}。本技术仅考虑节点位移属性,因此t=1;其属性可分为有节点位移和无节点位移,即k=2。
[0081]
s103、对所述抗剪强度参数进行抽样,根据抽样得到的黏聚力数据与内摩擦角数据,通过有限差分强度折减法计算得到滑坡稳定性系数,构建滑坡稳定性系数误差函数。
[0082]
对步骤s101中获得的抗剪强度参数,包括多组天然黄土的有效黏聚力、多组天然黄土的有效内摩擦角、多组饱和黄土的有效黏聚力以及多组饱和黄土的有效内摩擦角的数据进行随机抽样,得到遗传算法的随机抽样样本。
[0083]
在一种实施方式中,根据随机抽样得到的黏聚力数据与内摩擦角数据,使用flac有限差分软件自带的强度折减法进行边坡稳定性分析,通过下列公式进行抗剪强度参数折减,直到目标滑坡到达了极限平衡状态,此时的折减系数即为目标滑坡的稳定性系数fs,具体公式如下:
[0084]cr
=c/fs
[0085][0086]
式中,c为黏聚力数据;为内摩擦角数据;cr折减后的土体黏聚力;和为折减后的内摩擦角。
[0087]
假设所述目标滑坡失稳时的稳定性系数为1,构建的滑坡稳定性系数误差函数为:
[0088]
f3(x)=(fs(x)-1)
[0089]
式中,fs为有限差分强度折减法计算得到滑坡稳定性系数。
[0090]
本方法中,提前将三个误差函数写入遗传算法中,在遗传算法执行的过程中,将对应的参数带入误差函数中即可。
[0091]
s104、结合所述抗剪强度参数均值误差函数、所述滑面位置误差函数以及所述滑坡稳定性系数误差函数,基于多组随机抽样样本利用遗传算法进行多次迭代,得到最优参数组,其中,最优参数组包括最优的天然黄土的有效黏聚力、天然黄土的有效内摩擦角、饱和黄土的有效黏聚力以及饱和黄土的有效内摩擦角。
[0092]
本实施例中采用的遗传算法是nsga-ii遗传算法,nsga-ii是一种基于pareto最优解并带有精英保留策略的快速非支配多目标优化遗传算法。其主要分为以下三大计算部分:
[0093]
1、pareto解集快速非支配排序;
[0094]
2、计算拥挤度和拥挤度比较算子;
[0095]
3、交叉迭代,优胜劣汰进行精英保留策略筛选最优参数点。
[0096]
通过不断重复以上三个步骤,最终达到目标迭代计算次数或收敛条件,求出最优的pareto解集并输出。
[0097]
参照图3,示出了本技术实施例提供的反分析过程的流程图,首先构建100组随机抽样样本,其中每组随机抽样样本中包括四个样本参数,包括天然黄土的有效黏聚力、天然黄土的有效内摩擦角、饱和黄土的有效黏聚力以及饱和黄土的有效内摩擦角,遗传算法中100组随机抽样样本中各参数的可抽样范围可以是,抗剪强度参数构成的数据集中对应参数的最小值到最大值的范围内,每组随机抽样样本中各个参数的100组值服从步骤s101中计算的得到均值与标准差的正态分布。
[0098]
初始迭代次数n=0时,根据100组随机抽样样本,分别在flac模型中进行数值模拟,将每次模拟结果分别输入抗剪强度参数均值误差函数f1(x)中得到第一函数值,将100组随机抽样样本数值模拟计算得到滑动面计算数据分别带入滑面位置误差函数f2(x)中得到第二函数值,以及数值模拟计算得到的将稳定性系数计算数据分别带入稳定性系数误差函数f3(x)得到第三函数值,通过三个函数的约束,然后将得到的计算结果输入遗传算法中的交叉变异的步骤中,在进行n=1次迭代时,利用三个函数值对样本进行优化计算,如此循环,指导迭代次数n=n
max
,n
max
是自定义设置的目标迭代次数,此时输出pareto解集,pareto解集中包括三个函数的值。
[0099]
示例地,遗传算法根据初始的100组随机抽样样本,通过三个优化函数的计算结果保留剩下10个相对最优的样本,然后再随机抽样90组样本,把10个相对最优的样本和90组新抽取的样本一起组成100组样本,继续通过三个优化函数进行约束,如此反复直到迭次完成,得到最优pareto解集,从最优pareto解集中可以选出最优点;其中,将三个误差函数提前写入遗传算法中,在每次迭代时,根据多组样本带入对应的参数即可。
[0100]
本方法中构建了三个函数,因此本技术的pareto解集应该是一个三维坐标系。如果定义一组非支配pareto解的等级为1,将其从解集中去除,在剩下的解集中定义pareto解等级为2,重复以上过程,直到所有的pareto解集等级被划分完成,则可以得到解集中所有pareto解的等级,其中达到目标迭代计算次数或收敛条件时,靠坐标原点最近的pareto解为最优pareto解集。
[0101]
在获得最优pareto解集后,需要选取其中的最优点作为多目标优化反分析的最终解,因为抗剪强度参数误差、滑面误差和稳定性系数的误差量纲不同,因此本实施例首先要进行无量纲化,具体地选用欧几里德无量纲方法:
[0102][0103]
式中,表示无量纲化后的pareto解集,fi表示在多目标优化后的pareto解曲线上的点,n代表pareto解集上的点个数。
[0104]
本实施例选用linmap法确定pareto解集最优点,首先计算pareto解集中的点到最理想解点的距离:
[0105][0106]
式中,q为目标数量,表示在q个目标优化下的理想点。
[0107]
最后,选择的最优点i
final
为:
[0108]ifinal
=i∈min(d
i
)
[0109]
式中,d
i
为pareto解集中的点到最理想解点的距离。
[0110]
在得到pareto解集最优点后,确定最优点对应的最优参数组,最优参数组包括最优的天然黄土的有效黏聚力、天然黄土的有效内摩擦角、饱和黄土的有效黏聚力以及饱和黄土的有效内摩擦角。
[0111]
s105、根据所述目标滑坡的其他参数与所述最优参数组,在flac模型中构建模拟滑动面,对比所述模拟滑动面与所述目标滑坡的第一失稳的滑面观测信息的一致性。
[0112]
所述目标滑坡的其他参数包括尺寸参数,结构参数以及渗流参数等,与最优参数组结合,在flac模型中构建模拟滑动面,然后将模拟滑动面与所述目标滑坡的第一失稳的滑面观测信息进行比较,即判断模拟滑动面和实际滑面之间的一致性。
[0113]
s106、在所述一致性表征正确的情况下,通过flac模型得到所述目标滑坡的稳定性预测结果,所述预测结果包括后续失稳的稳定性系数与滑面信息。
[0114]
通过构建三个函数,即抗剪强度参数均值误差函数、滑面位置误差函数以及滑坡稳定性系数误差函数,并结合遗传算法,对多组随机抽样样本进行迭代计算,从而得到最优参数组,最优参数组包括最优的天然黄土的有效黏聚力、天然黄土的有效内摩擦角、饱和黄
土的有效黏聚力以及饱和黄土的有效内摩擦角;然后利用最优参数组数据以及目标滑坡的其他参数,在flac模型中构建模拟滑动面,对比模拟滑动面与目标滑坡实际的第一失稳的滑面观测信息的一致性,在所述一致性表征正确的情况下,通过flac模型得到目标滑坡的稳定性预测结果,预测结果包括后续失稳的稳定性系数与滑面信息。在一种实施方式中,除了预测目标滑坡的稳定性,还可以对相似的滑坡进行预测。
[0115]
本方法考虑到滑坡的第一次失稳时的滑面观测信息、抗剪强度参数信息以及稳定性系数,通过设置三个函数对反分析设定更多的优化约束条件,可以获得更加可靠的反分析结果,进而可以对目标滑坡的稳定性状态和临界滑面进行有效预测。
[0116]
示例地,以黑方台党川2#滑坡为例,采用本方法进行反分析第一次失稳,并预测第二次失稳。
[0117]
黑方台位于甘肃省永靖县黄河北岸,黑方台台塬面积约11.5km2,冲沟中发育最长的虎狼沟将黑方台分为两部分:西边面积较小的为方台,约1.5km2;东边面积较大的为黑台,约9km2。党川2#滑坡发生过两次静态液化型失稳破坏,其中,第一次失稳滑体长度约20m,平均宽度约115m,面积约8396m2;第二次失稳包括3轮滑动,总面积约27422m2。
[0118]
a1:根据对党川2#滑坡构建flac模型。
[0119]
参照图4,示出了滑坡纵剖面图,滑坡地层岩性从上至下分别为黄土,厚约20-50m;粉质黏土,厚约4-20m;砂卵石层,厚约1-8m;泥岩、砂质泥岩,产状135
°
∠11
°
。
[0120]
参照图5,示出了党川2#滑坡未发生滑坡时的模拟结果,该滑坡失稳破坏主要发生在黄土层中,运动过程中部分铲刮粉质黏土层,因此,选取黄土层和部分粉质黏土层建立flac模型,模型高50m,上宽260m,底部宽300m,采用定水头边界。
[0121]
黑方台地区的渗流模式比较复杂,是基质渗流和优势渗流的结合,由于粉质黏土的渗水性差,地下水在黄土底部富集并沿台塬边渗出,当在高灌溉量下,由优势渗流起主导作用,所以此处仅考虑优势渗流,在flac中gwflow模式下,使用快速饱和流方式,使得底部黄土迅速达到饱和状态,模拟高灌溉量水流通过黄土层的缝隙及裂隙快速达到底部;具体地,渗流模拟参数如表1所示。
[0122]
表1各土层的渗流参数
[0123][0124]
渗流模拟得出渗流水流从黄土层与粉质黏土层交界处流出,与实际相符,确定水位线以下为饱和黄土层,最终得到党川2#滑坡的f l ac模型。
[0125]
a2:获取黑方台地区黄土抗剪强度参数,并计算各个参数的均值与标准差。
[0126]
通过搜集大量黑方台滑坡的滑带土试验研究成果,获得抗剪强度参数,即分别获得天然黄土和饱和黄土的有效黏聚力和有效内摩擦角,并对其进行统计分析,计算得到均值与标准差,结果如表2所示。而粉质黏土层黏聚力为50kpa,内摩擦角为30
°
。
[0127]
表2参数均值及标准差
[0128][0129]
a3:构建三个优化目标函数,即抗剪强度参数均值误差函数、滑面位置误差函数以及滑坡稳定性系数误差函数。
[0130]
a4:确定反分析的最优参数组并进行反演。
[0131]
参照图6,示出了遗传算法迭代25次后的收敛情况示意图,参照图7示出了pareto多目标优化结果示意图;构建遗传算法的100组随机抽样样本,结合三个优化目标函数对100组随机抽样样本迭代25次,得到多目标优化的pareto解集,选用linmap法确定pareto解集最优点,图7中星号点即为pareto解集最优点。
[0132]
根据pareto解集最优点确定反分析的最优参数组,得到的结果为:天然黄土有效黏聚力为20.09kpa,有效内摩擦角为22.7
°
;饱和黄土有效黏聚力为12.21kpa,有效内摩擦为29.6
°
;对应的稳定性系数为0.97。
[0133]
参照图8,示出了第一次失稳中模拟滑动面与实际滑动面的对比示意图。如图8,将最优参数组代入flac模型进行反演,进而获得对应的模拟滑动面,并与第一次失稳滑动中实际滑动面进行对比,对比显示,虽然在滑面后缘有些许差异,但是反分析计算获得的临界滑面与实际观察滑面一致性较好。
[0134]
a5:利用flac模型预测滑坡的第二次失稳滑动,生成稳定性预测结果,预测结果包括后续失稳的滑面信息与稳定性系数。
[0135]
参照图9,示出了第二次失稳中预测滑动面的示意图。由于第二次失稳滑动与第一次失稳滑动之间仅间隔约3小时,短时间内黄土物理力学参数以及水位变化不大,因此可忽略不计,进而可将基于第一次失稳观察信息反分析获得的黄土抗剪强度参数用于第二次失稳滑动预测。
[0136]
第二次失稳滑动的范围更大,分为3轮滑动,3轮滑动之间间隔时间过短,只记录到第三轮滑动的滑面信息,第一轮和第二轮滑动仅记录到后缘点位置信息。
[0137]
图10(a)为第二次失稳的第一轮模拟获得的失稳范围示意图,其预测得到的稳定性系数为1.02;10(b)为第二次失稳的第二轮模拟获得的失稳范围示意图,其预测得到的稳定性系数为1.01;10(c)为第二次失稳的第三轮模拟获得的失稳范围示意图,其预测得到的计算稳定性系数为1.12。
[0138]
将对党川2#滑坡的第二次失稳滑动的预测结果与实际的失稳观察结果进行对比,吻合度较高,应用本方法成功预测了第二次失稳中的3轮滑动行为,预测临界滑面与实际观察滑面基本一致,仅第三轮滑面形态有较大差别。其次,3轮失稳预测的稳定性系数均接近1。其中第一和第二轮预测的稳定性系数分别为1.02和1.01,表示滑坡基本处于欠稳定状态,并接近极限平衡状态;第三轮预测的稳定性系数为1.12,表明滑坡处于基本稳定状态。
[0139]
通过上述示例,表明本方法的反分析结果和预测结果效果优异,通过结合三个优化目标函数,即抗剪强度参数均值误差函数、滑面位置误差函数以及滑坡稳定性系数误差
函数,得到更可靠的反分析结果,从而更准确的预测后续滑坡的稳定性。
[0140]
本技术实施例还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现实施例所述的方法。
[0141]
本技术实施例一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现实施例所述的方法。
[0142]
本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
[0143]
本领域内的技术人员应明白,本技术实施例的实施例可提供为方法、装置、或计算机程序产品。因此,本技术实施例可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术实施例可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0144]
本技术实施例是参照根据本技术实施例的方法、终端设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理终端设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理终端设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0145]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理终端设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0146]
这些计算机程序指令也可装载到计算机或其他可编程数据处理终端设备上,使得在计算机或其他可编程终端设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程终端设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0147]
尽管已描述了本技术实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术实施例范围的所有变更和修改。
[0148]
最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的相同要素。
[0149]
本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说
明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。