1.本发明涉及磁性液体密封仿真领域,特别涉及一种考虑热膨胀影响的磁性液体旋转密封耐压仿真方法。
背景技术:
2.磁性液体是一种智能材料,广泛应用于机械、浮选、声学、热力、医疗等领域。目前最成熟的应用是磁性液体密封,作为一种新型密封方式,具有零泄漏、高可靠性、长寿命、无摩擦等传统密封不可替代的优点,适用于这些特定领域的高速密封工况。
3.在磁场的作用下磁性液体被吸附在转轴和极靴的间隙内,在高速密封工况下,旋转轴带动磁性液体运动,由于磁性液体的黏性耗散产热导致密封间隙温度上升,转轴以及极靴材料由于热膨胀效应,导致密封间隙受热膨胀变形,并且密封间隙的变化会导致间隙内磁场分布的变化,进而影响磁性液体密封能力。
4.因此,热膨胀对磁性液体旋转密封影响的研究具有重要意义,而随着计算机硬件和有限元软件的飞速发展,数值计算已成为研究磁性液体密封问题的主要方法,仿真方法较实验方法有着研究费用少、周期短等优点,并能轻易揭示磁性液体密封复杂的内部结构机理。
技术实现要素:
5.本发明的目的在于,提供一种考虑热膨胀影响的磁性液体旋转密封耐压仿真方法。本发明能够综合考虑温度场对磁场和流场的影响,可快速、准确地模拟磁性液体旋转密封的热膨胀现象,也可完善磁性液体密封的仿真,为磁性液体密封的设计和优化提供理论依据。
6.本发明的技术方案:一种考虑热膨胀影响的磁性液体旋转密封耐压仿真方法,所述具体步骤为:
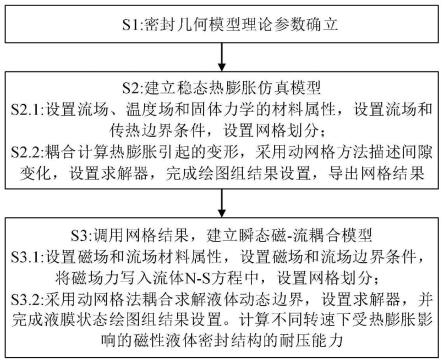
7.步骤s1:确立密封几何模型理论参数,建立简化的二维轴对称磁性液体旋转密封模型;
8.步骤s2:建立稳态热膨胀模型,采用流场、温度场和固体力学场耦合求解热膨胀变形并导出网格结果;
9.步骤s3:调用网格结果,建立瞬态磁-流耦合模型;利用瞬态磁-流耦合模型计算出不同转速下的耐压能力。
10.所述步骤s1中的二维轴对称磁性液体旋转密封模型包括壳体,壳体上设有转轴,转轴上套设有两个上下设置的极靴,极靴之间设有与两者贴合的永磁铁,永磁铁、极靴和转轴之间具有多个磁回路,磁回路内具有磁性液体。
11.所述步骤s2的具体步骤如下:
12.步骤s2.1:设置流场、温度场和固体力学的材料属性,设置流场和传热边界条件,设置网格划分;
13.步骤s2.2:耦合计算热膨胀引起的变形,采用动网格方法描述间隙变化,设置求解器,完成绘图组结果设置,导出膨胀变形后的网格结果。
14.所述热膨胀模型中的流场设置旋转壁速度,热膨胀模型中的固体力学场设置接触对;所述温度场设置绝热源和热通量,热通量为对流热通量;所述热膨胀模型网格划分采用自由三角形网格。
15.所述步骤s3的具体步骤如下:
16.步骤s3.1:设置磁场和流场材料属性,设置磁场和流场边界条件,将磁场力写入流体n-s方程中,设置网格划分;
17.步骤s3.2:采用动网格法耦合求解液体动态边界,设置求解器,并完成液膜状态绘图组结果设置,计算不同转速下受热膨胀影响的磁性液体密封结构的耐压能力。
18.所述磁场的边界条件定义为磁场上确定永磁铁的磁化能力以及磁性材料的磁化曲线;所述流场的边界条件定义为在流场确定旋转速度、压力入口、压力出口和流体界面,并在流场写入磁场对磁性液体的体积力作为耦合磁场与流场的桥梁。
19.所述步骤s3的瞬态磁-流耦合模型设置包括定义时间步长、总时间、求解类型以及停止条件;所述停止条件是指在磁性液体耐压突破时停止计算。
20.与现有技术相比,基于热膨胀效应建立数学模型,将磁性液体密封结构的热膨胀变化考虑在内,对磁性液体密封的耐压能力进行分析;本发明添加热膨胀的影响可以更加准确的获得的磁性液体旋转密封的耐压性能;研究人员能够根据不同磁性材料的热膨胀效应,合理组合磁性材料,从而提高密封性能,并且有助于加深对磁性液体密封工作状态的认识,对磁性液体密封的设计和应用具有指导意义,具有方法实现简单和计算量少的特点。
附图说明
21.图1是本发明的第一流程示意图;
22.图2是本发明的第二流程示意图;
23.图3是本发明实施例中的几何模型;
24.图4是本发明实施例中磁性液体的黏性系数;
25.图5是本发明实施例瞬态层流边界情况;
26.图6是本发明实施例瞬态层流网格划分;
27.图7是本发明实施例密封间隙热膨胀位移的仿真结果;
28.图8是本发明实施例临界压力下的磁性液体边界状态仿真结果;
29.图9是本发明实施例是否考虑热膨胀影响的耐压能力比较结果。
30.附图中的标记为:1、转轴,2、磁性液体,3、极靴,4、永磁铁,5、壳体,6、入口,7、空气域,8、出口。
具体实施方式
31.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
32.实施例:一种考虑热膨胀影响的磁性液体旋转密封耐压仿真方法,如附图1和附图2所示,按下述步骤进行:
33.步骤s1:确立密封几何模型理论参数,建立简化的二维轴对称磁性液体旋转密封模型;所述步骤s1中的二维轴对称磁性液体旋转密封模型包括壳体5,壳体上设有转轴1,转轴上套设有两个上下设置的极靴3,极靴之间设有与两者贴合的永磁铁4,永磁铁、极靴和转轴之间具有多个磁回路,磁回路内具有磁性液体2,磁性液体形成多个密封液膜,几何关键参数如表1所示,不显示空气域模型如附图3所示。
[0034][0035]
表1几何关键参数
[0036]
步骤s2:建立稳态热膨胀模型,采用流场、温度场和固体力学场耦合求解热膨胀变形并导出网格结果;
[0037]
所述步骤s2的具体步骤如下:
[0038]
步骤s2.1:设置流场、温度场和固体力学的材料属性,设置流场和传热边界条件,设置网格划分;
[0039]
1)建立二维轴对称模型,给定磁性液体初始界面。
[0040]
2)转轴、极靴、永磁铁、磁性液体以及外壳材料参数如表2所示。
[0041][0042][0043]
表2材料定义
[0044]
3)空气域的材料属性采用软件自带属性;初始温度为20℃;磁性液体的动力粘度如附图4所示,并使用“插值”函数形式与仿真链接;设置“接触对1”,“源边界”为永磁铁下侧边界,“目标边界”为下极靴与永磁铁接触边界;设置“接触对2”,“源边界”为永磁铁上侧边
界,“目标边界”为上极靴与永磁铁接触边界。
[0045]
4)“层流”域选择磁性液体,设置为“不可压缩流动”,并选择“涡流”;设置“壁”,边界选择磁性液体和转轴的交界面,“移动壁速度”phi方向设置为v,且“壁条件”为“无滑动”;设置“压力点约束”,以确保仿真收敛。
[0046]
5)“固体力学”域包含转轴、极靴、永磁铁和壳体,设置永磁铁和极靴为“接触”,“对选择”为“接触对1”和“接触对2”;设置极靴外侧边为“辊支撑”。
[0047]
6)“固体和流体传热”域包含所有部件以及部件所包围的空气域;以壳体外侧为“热通量”边界,其类型为“对流热通量”;其余外侧边界均为绝热缘。
[0048]
7)添加“多物理场”—“非等温流动”,其耦合接口为“层流”和“固体和流体传热”;“流动加热”为“黏性耗散”,添加“热膨胀”多物理场。
[0049]
8)所有网格“序列类型”采用“物理场控制网格”。
[0050]
步骤s2.2:耦合计算热膨胀引起的变形,采用动网格方法描述间隙变化,设置求解器,完成绘图组结果设置,导出膨胀变形后的网格结果;
[0051]
1)设置“动网格”,“变形域”包括空气和磁性液体的所有域;“网格平滑类型”为“yeoh”,“硬化因子”为10。
[0052]
2)设置“参数化扫描”,添加“v(转速)”进行扫描,参数值范围为0-10m/s,步长为1。
[0053]
3)设置求解器,使用默认求解器。
[0054]
4)完成绘图组结果设置,导出网格结果。
[0055]
步骤s3:调用网格结果,建立瞬态磁-流耦合模型;利用瞬态磁-流耦合模型计算出不同转速下的耐压能力;
[0056]
所述步骤s3的具体步骤如下:
[0057]
步骤s3.1:设置磁场和流场材料属性,设置磁场和流场边界条件,将磁场力写入流体n-s方程中,设置网格划分,所述磁场的边界条件定义为磁场上确定永磁铁的磁化能力以及磁性材料的磁化曲线;所述流场的边界条件定义为在流场确定旋转速度、压力入口、压力出口和流体界面,并在流场写入磁场对磁性液体的体积力作为耦合磁场与流场的桥梁;
[0058]
1)定义压力参数p0=1e6pa;定义阶跃函数step1和斜坡函数rm1用于施加转速和加载压力,其目的是速度达到稳定后再控制压力加载;定义极齿中点正下方转轴边的点为临界点,并在该点设“域点探针”,“点探针表达式”为“root.material.domain”;磁性液体和2cr13(转轴、极靴)的磁化曲线写入comsol;对于磁流体和空气域,设置“变形域”;“网格平滑类型”为“yeoh”,“硬化因子”为10。
[0059]
2)“磁场”域包含所有域,转轴、极靴和磁性液体的“磁通量守恒”设置“b-h曲线”为“磁化模型”,“磁通密度模”来源“来自材料”,“磁共能密度”来源“来自材料”;而永磁铁的“磁通量守恒”设置“磁化”为“磁化模型”,并且“磁化”z方向设置为“960000”;设置零标量磁势。
[0060]
3)为简化计算,这里模拟一个极齿的密封能力,所以“层流”域包含附图5中有色区域中的磁性液体2和空气域7,“物理模型”勾选“涡流”;设置“入口”6,“静压”为“p0*rm1(t[1/s])”;设置“出口”8,“静压”为“0”;设置“流体-流体界面”,“边界选择”包括空气与磁性液体的边界;设置“壁”,“边界选择”为转轴边,“移动壁速度分量”设置为“v*step1(t[1/s])”;设置“体积力”,“域选择”包括空气和磁性液体,“体积力”r方向设置为“(mfnc.mr*d
(mfnc.br,r) mfnc.mz*d(mfnc.br,z))*step1(t[1/s])”,“体积力”z方向设置为“(mfnc.mr*d(mfnc.bz,r) mfnc.mz*d(mfnc.bz,z))*step1(t[1/s])”。
[0061]
4)“网格序列类型”网格序列类型采用“用户控制网格”;对磁性液体选择自由三角形网格划分,并定制“单元大小”为2e-2mm;对空气域选择自由三角形网格划分,并定制“单元大小”为0.1mm;其他域选择自由三角形网格划分,预定义为“较细化”;流体的网格划分如附图6所示。
[0062]
步骤s3.2:采用动网格法耦合求解液体动态边界,设置求解器,并完成液膜状态绘图组结果设置,计算不同转速下受热膨胀影响的磁性液体密封结构的耐压能力;
[0063]
1)在研究“瞬态”步骤中,“输出时间”的定义方式为“对数”,“起始”为1e-6,“终止”为1,“每十倍频率步数”为10,即“输出时间”为“0,10^{range(log10(1.0e-6),1/10,log10(0.5))}”。
[0064]
2)设置瞬态求解器,“直接”求解器选择“mumps”;添加“停止条件”,“停止表达式”为“root.comp1.ppb1《5”,满足条件为“true(》=1)”。
[0065]
3)生成并保存密封结构的热膨胀云图、磁性液体边界状态云图,如附图7和附图8所示。
[0066]
4)得到考虑和不考虑热变形的耐压差别,仿真结果附图9所示,考虑热膨胀仿真组较不考虑热膨胀的临界压强较大。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。