1.本发明涉及停车管理技术领域,更为具体的,涉及一种巡检车泊位定位装置、方法及系统。
背景技术:
2.目前城市道路路边停车收费方案,有传统人工加手持终端收费、高低位视频桩方案,但各自都有着运营成本高或建设成本高等问题。而巡检车巡检路边泊位停车收费方案则是另一种补充方案,巡检车针对路边临时泊位的停车收费管理,需要准确识别泊位停车并定位泊位位置,匹配到对应的泊位与车辆,将抓拍照片和泊位停车匹配识别结果等数据上传平台进行证据链组合。
3.因此对泊位的智能识别和定位就非常重要,而目前的卫星定位技术在精度上对泊位的定位还有较大的误差,同一条路线多次定位也会出现水平位移。尤其在面临有高层建筑或遮挡时,信号很差,会产生更大的定位漂移。
4.另外,在没有gnss定位信号的地方也没有一个可行的完整方案,所以需要一套完整的定位方案来解决巡检车泊位定位中gnss定位水平位移、定位信号差和无卫星定位信号的情况。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种巡检车泊位定位装置、方法及系统,扩大了巡检车系统应用场景,提高系统可用性;提高定位的精准度,使泊位定位准确率更高;减少人工的参与度,大大减少了劳动强度,降低运营成本。
6.本发明的目的是通过以下方案实现的:
7.一种巡检车泊位定位装置,包括卫星定位模块、无线通信模块、泊位识别装置、处理器、uwb基站装置、uwb标签和uwb服务器;卫星定位模块、无线通信模块、泊位识别装置均与处理器连接,uwb标签独立集成在装置中,位置数据通过uwb基站装置传到uwb服务器;所述卫星定位模块,用于接收高精度卫星定位信号;所述无线通信模块,用于连接云端服务器;所述泊位识别装置,用于对泊位识别、泊位停车识别和车牌识别。
8.进一步地,包括勘测采集模块,用于对泊位位置信息进行勘测采集,具体包括:泊位位置信息勘测:勘测路边临时泊位划线停车场开始点的差分定位高精位置坐标、结束点的差分定位高精位置坐标、每个泊位的差分定位高精位置坐标,每个泊位到开始点的距离,每个泊位到uwb基站的距离。
9.进一步地,所述卫星定位模块包括gnss高精定位模块。
10.进一步地,所述泊位识别装置包括双目相机。
11.进一步地,所述uwb基站装置安装在路边杆上。
12.一种基于如上任一项所述巡检车泊位定位装置的方法,包括步骤:
13.s1,前期对泊位进行位置勘测,勘测确定每个泊位、路边临时停车场开始点、结束
点的位置坐标和每个泊位到停车场开始点的距离信息;
14.s2,巡检车通过控制泊位识别装置识别路边临时停车场的泊位,识别到泊位时获取卫星定位模块的实时位置坐标,并与步骤s1中前期勘测获取到的路边临时停车场开始点位置坐标进行误差计算,得到误差数据;
15.s3,当巡检车通过泊位识别装置识别到泊位停车时,及时获取卫星定位模块的实时位置坐标,并与步骤s2中开始时得到的误差数据做误差修正,最终得到泊位停车的修正位置坐标,然后匹配到相应位置坐标的泊位号。
16.进一步地,所述修正包含位置坐标修正、测量距离与当前实际定位点到开始点实时定位的距离修正。
17.一种基于如上任一项所述巡检车泊位定位装置的方法,包括步骤:通过泊位识别装置连续识别泊位,依次逐个识别泊位,识别成功后获取卫星定位模块实时定位位置信息并与泊位信息做动态修正;所述泊位信息包括勘测精确数据。
18.一种基于如上任一项所述巡检车泊位定位装置的方法,当卫星定位模块没有信号或者信号很差时,包括步骤:前期勘测确定每个泊位到停车场uwb基站的距离信息;巡检车通过控制泊位识别装置,成功识别路边泊位停车时,通过连接uwb服务器及时获取uwb标签距离信息,并与前期勘测确定的uwb基站到泊位距离信息相比较,确定泊位位置信息。
19.一种融合定位系统,包括如上任一项所述巡检车泊位定位装置。
20.本发明的有益效果包括:
21.1.通过gnss定位与uwb定位装置结合,可以避免没有gnss信号的场景,扩大了巡检车系统应用场景,提高系统可用性;
22.2.通过智能相机装置识别泊位,将前期勘测的高精位置对实时gnss定位数据做误差修正,提高定位的精准度,使泊位定位准确率更高;
23.3.智能识别泊位停车,减少人工的参与度,大大减少了劳动强度,降低运营成本。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
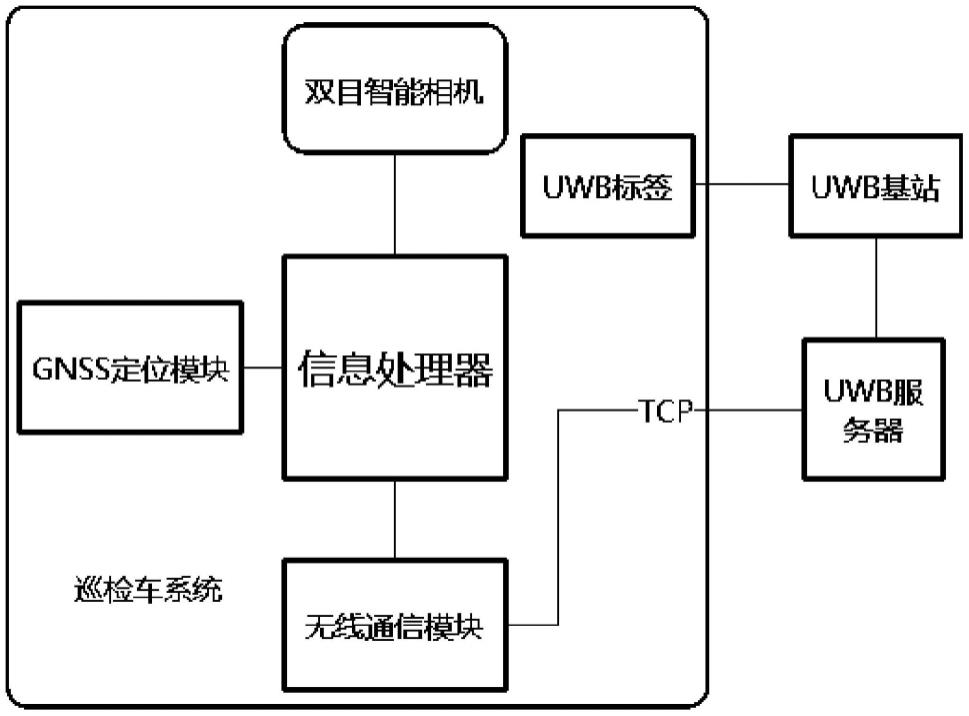
25.图1为本发明实施例的巡检车系统连接框图;
26.图2为本发明实施例的泊位勘测图;
27.图3为本发明实施例的泊位定位误差修正图。
具体实施方式
28.本说明书中所有实施例公开的所有特征,或隐含公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合和/或扩展、替换。
29.下面根据附图1~图3,对本发明的技术构思、解决的技术问题、工作原理、工作过程和有益效果作进一步详细、充分地说明。
30.本发明的目的在于提供一种更完整的巡检车泊位定位装置、方法及系统,旨在解
决泊位管理中对泊位进行定位不准的问题,通过本发明装置和方法可以智能检测泊位位置,在卫星定位有水平位移时也能通过位移误差纠正来修复位置以精确定位泊位,匹配泊位停车。
31.本发明的目的还在于提供一种融合定位系统,在卫星定位信号非常差或无信号的地方也能准确匹配到泊位,解决没有卫星定位信号无法定位问题。
32.如图1所示,本发明实施例提供的装置方案包括gnss高精定位模块、无线通信模块、泊位识别装置(双目相机)、处理器、智能识别系统、uwb(超宽带无线通信技术是一种无载波通信技术)基站装置(安装在路边杆上)、uwb标签和uwb服务器和一套融合多种定位方式的控制系统。
33.如图2所示,前期对泊位位置信息的勘测采集包括:泊位位置信息勘测:前期勘测路边临时泊位划线停车场开始点的差分定位高精位置坐标、结束点的差分定位高精位置坐标、每个泊位的差分定位高精位置坐标,每个泊位到开始点的距离,每个泊位到uwb基站的距离(uwb定位方式)。其中,gnss高精定位模块,用于接收高精度卫星定位信号;无线通信模块,用于连接云端服务器;泊位识别装置,用于对泊位识别、泊位停车识别和车牌识别;高精卫星定位模块、无线通信模块、泊位识别装置(双目相机)均与处理器连接,uwb标签独立集成在系统装置中,位置数据通过uwb基站传到uwb服务器。
34.如图3所示,本发明实施例提供一种泊位定位方法的技术方案,包括步骤:
35.前期对泊位进行高精位置勘测,勘测确定每个泊位、路边临时停车场开始点、结束点的位置坐标和每个泊位到停车场开始点的距离信息;
36.巡检车通过控制泊位识别装置识别路边临时停车场的第一个泊位,识别到第一个泊位时获取gnss高精定位模块实时位置坐标,并与前期勘测获取到的路边临时停车场开始点位置坐标进行误差计算,得到误差数据。
37.当巡检车泊位识别装置识别到泊位停车时,及时获取模块实时位置坐标,与开始时得到的误差数据做误差修正(修正包含位置坐标修正、测量距离与当前实际定位点到开始点实时定位的距离修正),最终得到泊位停车的修正位置坐标,然后匹配到相应位置坐标的泊位号。
38.本发明提供的技术方案,也可以通过泊位识别装置连续识别泊位,依次逐个识别泊位,识别成功后获取gnss定位模块实时定位位置信息并与泊位信息(勘测精确数据)做动态修正。
39.本发明还提供一种定位的技术方案,当gnss高精定位模块没有信号或者信号很差时,则使用uwb装置(有安装uwb基站),包括步骤:前期勘测确定每个泊位到停车场uwb基站的距离信息。巡检车通过控制泊位识别装置,成功识别路边泊位停车时,通过连接uwb服务器及时获取uwb标签距离信息,并与前期勘测确定的基站到泊位距离信息相比较,确定泊位位置信息。
40.通过智能识别泊位获取前期勘测的精准泊位位置数据与实时获取的定位数据做误差修正,提高精准度,提升泊位定位匹配率;通过gnss定位与uwb定位场景互补,融合定位泊位方案。
41.实施例1:一种巡检车泊位定位装置,包括卫星定位模块、无线通信模块、泊位识别装置、处理器、uwb基站装置、uwb标签和uwb服务器;卫星定位模块、无线通信模块、泊位识别
装置均与处理器连接,uwb标签独立集成在装置中,位置数据通过uwb基站装置传到uwb服务器;所述卫星定位模块,用于接收高精度卫星定位信号;所述无线通信模块,用于连接云端服务器;所述泊位识别装置,用于对泊位识别、泊位停车识别和车牌识别。
42.实施例2:在实施例1的基础上,包括勘测采集模块,用于对泊位位置信息进行勘测采集,具体包括:泊位位置信息勘测:勘测路边临时泊位划线停车场开始点的差分定位高精位置坐标、结束点的差分定位高精位置坐标、每个泊位的差分定位高精位置坐标,每个泊位到开始点的距离,每个泊位到uwb基站的距离。
43.可选的实施方式,所述卫星定位模块包括gnss高精定位模块。
44.可选的实施方式,所述泊位识别装置包括双目相机。
45.可选的实施方式,所述uwb基站装置安装在路边杆上。
46.实施例3:一种基于如上任一项实施例中所述巡检车泊位定位装置的方法,包括步骤:
47.s1,前期对泊位进行位置勘测,勘测确定每个泊位、路边临时停车场开始点、结束点的位置坐标和每个泊位到停车场开始点的距离信息;
48.s2,巡检车通过控制泊位识别装置识别路边临时停车场的泊位,识别到泊位时获取卫星定位模块的实时位置坐标,并与步骤s1中前期勘测获取到的路边临时停车场开始点位置坐标进行误差计算,得到误差数据;
49.s3,当巡检车通过泊位识别装置识别到泊位停车时,及时获取卫星定位模块的实时位置坐标,并与步骤s2中开始时得到的误差数据做误差修正,最终得到泊位停车的修正位置坐标,然后匹配到相应位置坐标的泊位号。
50.实施例4:在实施例3的基础上,所述修正包含位置坐标修正、测量距离与当前实际定位点到开始点实时定位的距离修正。
51.实施例5:一种基于如上任一项实施例中所述巡检车泊位定位装置的方法,包括步骤:通过泊位识别装置连续识别泊位,依次逐个识别泊位,识别成功后获取卫星定位模块实时定位位置信息并与泊位信息做动态修正;所述泊位信息包括勘测精确数据。
52.实施例6:一种基于如上任一项实施例中所述巡检车泊位定位装置的方法,当卫星定位模块没有信号或者信号很差时,包括步骤:前期勘测确定每个泊位到停车场uwb基站的距离信息;巡检车通过控制泊位识别装置,成功识别路边泊位停车时,通过连接uwb服务器及时获取uwb标签距离信息,并与前期勘测确定的uwb基站到泊位距离信息相比较,确定泊位位置信息。
53.实施例7:一种融合定位系统,包括如上任一项实施例中所述巡检车泊位定位装置。
54.本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
55.上述技术方案只是本发明的一种实施方式,对于本领域内的技术人员而言,在本发明公开了应用方法和原理的基础上,很容易做出各种类型的改进或变形,而不仅限于本发明上述具体实施方式所描述的方法,因此前面描述的方式只是优选的,而并不具有限制性的意义。
56.除以上实例以外,本领域技术人员根据上述公开内容获得启示或利用相关领域的知识或技术进行改动获得其他实施例,各个实施例的特征可以互换或替换,本领域人员所
进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。