技术特征:
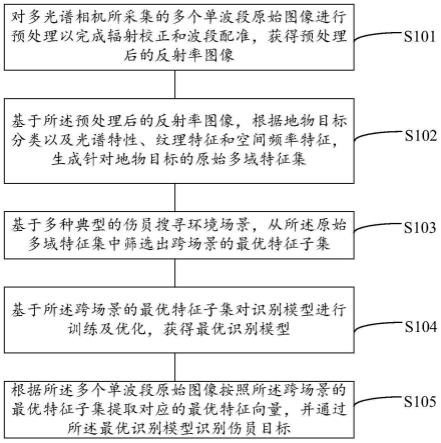
1.一种复杂场景下机载多光谱多域优选特征的地面伤员识别方法,其特征在于,所述方法包括:对多光谱相机所采集的多个单波段原始图像进行预处理以完成辐射校正和波段配准,获得预处理后的反射率图像;基于所述预处理后的反射率图像,根据地物目标分类以及光谱特性、纹理特征和空间频率特征,生成针对地物目标的原始多域特征集;基于多种典型的伤员搜寻环境场景,从所述原始多域特征集中筛选出跨场景的最优特征子集;基于所述跨场景的最优特征子集对识别模型进行训练及优化,获得最优识别模型;根据所述多个单波段原始图像按照所述最优特征子集提取对应的最优特征向量,并通过所述最优识别模型识别伤员目标。2.根据权利要求1所述的方法,其特征在于,所述单波段原始图像包括单波段遥感影像像元亮度dn值原始图像;相应地,所述对多光谱相机所采集的多个单波段原始图像进行预处理以完成辐射校正和波段配准,获得预处理后的反射率图像,包括:利用所述多光谱相机拍摄灰板;从所述拍摄的灰板图像中获取灰板区域;基于所述灰板区域制作掩膜;利用所述掩膜获取所述dn值原始图像中灰板区域的dn值;对所述dn值原始图像中灰板区域的dn值消除渐晕效应,获得每个像素的辐亮度以及所述dn值原始图像中灰板区域内的平均辐亮度;通过下行光传感器dls对每组dn值原始图像的辐亮度进行辐照度补偿后,采用经验线反射率校正方法完成辐亮度到反射率的转换,获得与多个单波段原始图像分别对应的单波段反射率图像;将多个所述单波段反射率图像通过加速稳健特征surf算法提取特征点之后,对提取的特征点进行匹配,并计算仿射变换矩阵以完成图像重投影,生成多光谱合成反射率图像。3.根据权利要求2所述的方法,其特征在于,所述从所述拍摄的灰板图像中获取灰板区域,包括:对所述拍摄的灰板图像进行二值化处理后,根据最大类间方差法所确定的阈值对二值化处理后的图像数据进行阈值化,以使得阈值化后的黑白像素的类内方差最小化;采用16
×
16的正方形结构元素对阈值化后的图像数据进行闭运算,以获得尽可能少的连通区域,并从所有连通区域中选取最大非零连通区域为灰板区域。4.根据权利要求1所述的方法,其特征在于,所述预处理后的反射率图像,包括6张单波段反射率图像以及一张多光谱合成反射率图像;相应地,所述基于所述预处理后的反射率图像,根据地物目标分类以及光谱特性、纹理特征和空间频率特征,生成针对地物目标的原始多域特征集,包括:针对所述预处理后的反射率图像,将地物目标分类为伤员目标和背景环境两个大类,并分别获取相应光谱特征f
reflectivity
、纹理特征f
texture
和空间频率特征f
convolution
,从而形成地物目标的原始多域特征描述集初始值f
global
如下式所示:
其中,光谱特征f
reflectivity
中的r
b1
至r
b6
分别表示ms600多光谱相机的6个波段对应的辐射校正后反射率值,光谱特征光谱特征f
reflectivity
中的f
index
=f
index
(ndvi,ndgi,ngbdi,psri,sipi,mndvi,msr,evi)表示8个涉及植被指数的光谱特征,包括归一化植被指数(ndvi,normalized difference vegetation index)、归一化差异绿度植被指数ndgi、归一化蓝绿差异指数ngbdi、植被衰减指数psri、结构不敏感色素指数sipi、改进红边归一化植被指数mndvi、修正型比值植被指数msr以及增强型植被指数evi;纹理特征f
texture
(mean,var,con,hom,dis,ent,asm,cor)为采用灰度共生矩阵针对每个波段图像分别获得的8个纹理特征f
texture
,包括均值mean、方差var、协同性hom、对比度con、相异性dis、信息熵ent、二阶矩asm和相关性cor;空间频率特征f
convolution
为针对预处理后多个单波段反射率图像分别执行高通滤波和低通滤波所得到的高频特征和低频特征,其中,hp
b1
到hp
b6
为6个波段分别对应的高频特征,对应不同区域之间的边缘信息;lp
b1
到lp
b6
为6个波段分别对应的低频特征,对应图像的低频信息以获取图像的灰度变化和图像细节;利用主成分分析法pca从6个波段的每个波段对应的纹理特征中选取3个主成分特征以替换f
texture
(mean,var,con,hom,dis,ent,asm,cor),获得最终的针对地物目标的原始多域特征集f
global
如下所示:其中,f
texture
(pca
i
)代表pca转换后第i个主成分对应的灰度共生矩阵纹理特征,f
convolution
(lp)代表卷积滤波后的低通(low pass)频率特征,f
convolution
(hp)则是卷积滤波后的高通(high pass)频率特征。5.根据权利要求1所述的方法,其特征在于,所述基于多种典型的伤员搜寻环境场景,从所述原始多域特征集中筛选出跨场景的最优特征子集,包括:利用支持向量机的递归特征消除法svm-rfe和relief算法分别针对所述原始多域特征集中的特征按照对目标识别分类的贡献率从大到小排序,得到对应的两种排序结果;以svm模型作为分类器,将每种排序结果的前n个特征作为输入特征组合,通过交叉验证测试目标识别效率;根据所述目标识别效率从所述输入特征组合中选取在保持识别准确率处于设定阈值范围内的前提下特征数量最少的特征组合,并将被选取出的特征组合作为所述跨场景的最优特征子集。6.根据权利要求1所述的方法,其特征在于,所述根据所述多个单波段原始图像按照所述最优特征子集提取对应的最优特征向量,并通过所述最优识别模型识别伤员目标,包括:将所述多个单波段原始图像按照所述最优特征子集提取待处理的最优特征向量;将所述最优特征向量通过所述最优识别模型进行分类,识别伤员目标。
7.根据权利要求6所述的方法,其特征在于,所述将所述最优特征向量通过所述最优识别模型进行分类,识别伤员目标,包括:将所述最优特征子集中的每个特征向量均作为一个样本进行分类,符合目标特征的赋值为1,否则为0,从而形成预测二值图像;对所述预测二值图像进行闭运算以使相邻目标区域连通后,采用方向梯度直方图hog描述器捕捉局部形状信息,并使用最优识别模型进行人体形状检测;判定为人体后,计算人体目标中心点坐标,并在所述中心坐标作标记;将所述原始图像中的gps位置信息确定为拍摄时所述多光谱相机所在位置;结合无人机航向和地面像素分辨率,根据所述人体目标所在像平面坐标系位置,计算出所述人体目标在实际地面测量坐标系位置。8.一种复杂场景下机载多光谱多域优选特征的地面伤员识别装置,其特征在于,所述装置包括:预处理部分、特征生成部分、特征筛选部分、训练优化部分和识别部分;其中,所述预处理部分,经配置为对多光谱相机所采集的多个单波段原始图像进行预处理以完成辐射校正和波段配准,获得预处理后的反射率图像;所述特征生成部分,经配置为基于所述预处理后的反射率图像,根据地物目标分类以及光谱特性、纹理特征和空间频率特征,生成针对地物目标的原始多域特征集;所述特征筛选部分,经配置为基于多种典型的伤员搜寻环境场景,从所述原始多域特征集中筛选出跨场景的最优特征子集;所述训练优化部分,经配置为基于所述跨场景的最优特征子集对识别模型进行训练及优化,获得最优识别模型;所述识别部分,经配置为根据所述多个单波段原始图像按照所述跨场景的最优特征子集提取对应的最优特征向量,并通过所述最优识别模型识别伤员目标。9.一种复杂场景下机载多光谱多域优选特征的地面伤员识别系统,其特征在于,所述系统包括:多光谱相机、存储器和处理器;其中,所述多光谱相机,用于采集遥感影像像元亮度dn值原始图像;所述存储器,用于存储能够在所述处理器上运行的计算机程序;所述处理器,用于在运行所述计算机程序时,执行权利要求1至7任一项所述复杂场景下机载多光谱多域优选特征的地面伤员识别方法的步骤。10.一种计算机存储介质,其特征在于,所述计算机存储介质存储有复杂场景下机载多光谱多域优选特征的地面伤员识别程序,所述复杂场景下机载多光谱多域优选特征的地面伤员识别程序被至少一个处理器执行时实现权利要求1至7任一项所述复杂场景下机载多光谱多域优选特征的地面伤员识别方法的步骤。
技术总结
本发明实施例公开了一种复杂场景下机载多光谱多域优选特征的地面伤员识别方法、装置及介质;该方法包括:对多光谱相机所采集的多个单波段原始图像进行预处理以完成辐射校正和波段配准,获得预处理后的反射率图像;基于所述预处理后的反射率图像,根据地物目标分类以及光谱特性、纹理特征和空间频率特征,生成针对地物目标的原始多域特征集;基于多种典型的伤员搜寻环境场景,从所述原始多域特征集中筛选出跨场景的最优特征子集;基于所述跨场景的最优特征子集对识别模型进行训练及优化,获得最优识别模型;根据所述多个单波段原始图像按照所述跨场景的最优特征子集提取对应的最优特征向量,并通过所述最优识别模型识别伤员目标。目标。目标。
技术研发人员:祁富贵 路国华 朱明明 雷涛 李丹 李钊 夏娟娟 张林媛 闫一力 王健琪
受保护的技术使用者:中国人民解放军空军军医大学
技术研发日:2022.03.30
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。