1.本发明属于机器人动力技术领域,具体涉及机器人动力学分析系统。
背景技术:
机器人动力学是对机器人机构的力和运动之间关系与平衡进行研究的学科。机器人动力学是复杂的动力学系统,对处理物体的动态响应取决于机器人动力学模型和控制算,主要研究动力学正问题和动力学逆问题两个方面,需要采用严密的系统方法来分析机器人动力学特性。现有的机器人动力学分析系统在对机器人的动力分析中,只能进行局部的检测,无法对整个机器人进行检测,因此在后期的动力分析中,存在数据准确度不高的现象,实际使用中存在较大的局限性,具有可改进的空间。
技术实现要素:
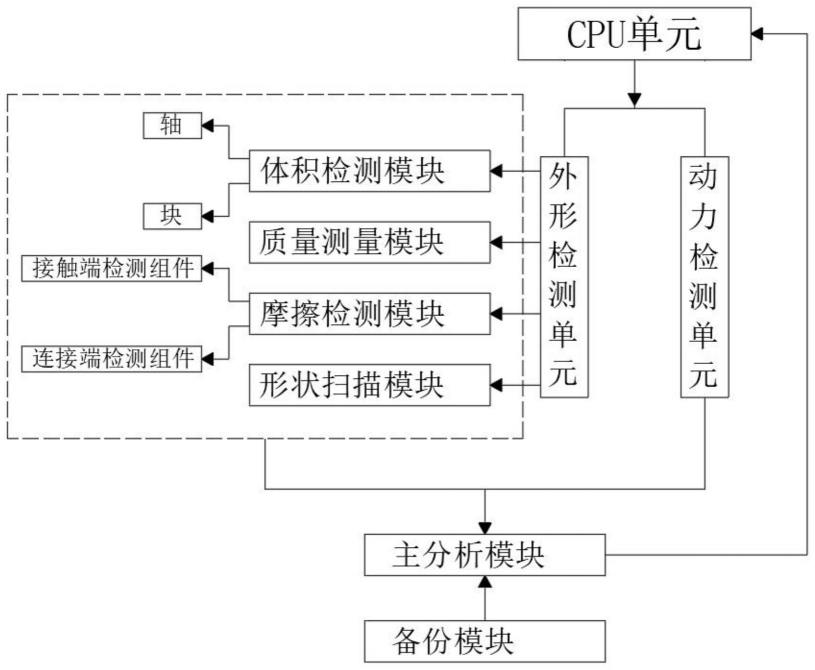
本发明的目的在于提供机器人动力学分析系统,以解决上述背景技术中提出的问题。为实现上述目的,本发明提供如下技术方案:机器人动力学分析系统,包括用于接收所有分析数据以及结构的cpu单元,所述cpu单元的输出端上连接有用于对机器人的外形进行检测的外形检测单元,以及用于对机器人的动力进行检测的动力检测单元;所述外形检测单元包括用于对需要分析的机器人体积进行检测的体积检测模块,以此获得机器人所有的体型数据,与其他机器人进行分类,同时采集的数据具有单一性和唯一性的特性,在多个机器人检测中,便于分类;用于对机器人的总质量进行检测计算的质量测量模块,以此计算出机器人在运动中,不考虑摩擦力的前提下,需要多少的动力才能够带动机器人运动;用于对机器人在运行中所产生的摩擦力进行计算的摩擦检测模块,用于计算在机器人在正常运行中所耗费的动力值;以及用于对所检测机器人的外观检测的形状扫描模块,通过对外观的扫描,来判断机器人在运行过程中,所受到的风阻大小。优选的,所述体积检测模块包括用于对机器人中所有的轴检测的轴模块,以及用于对机器人整体中所有的快状物检测的块模块,通过多个小部件的检测,使得检测的效果更加精准。优选的,所述摩擦检测模块包括用于对机器人底部与放置面之间的摩擦力进行检测的接触端检测组件,以及用于对机器人轴与轴、轴与块之间的摩擦力进行检测的连接段检测组件,该组件主要用于对机器人自身产生的摩擦力进行检测。优选的,所述外形检测单元与动力检测单元的输出端上连接有主分析模块,该主分析模块用于将采集的数据进行计算、归纳、整理,以此得出最终稿的动力分析报告。优选的,所述主分析模块的输出端与cpu的输入端相连接,用于将分析报告的上
传。优选的,所述主分析模块上连接有备份模块,该备份模块用于将主分析模块的数据进行备份,避免丢失出现数据无法找回的现象,该备份模块与外部终端无线传输连接。优选的,所述外部终端为手机、平板、电脑中的一种或多种。与现有技术相比,本发明的有益效果是:通过本发明的设计,可以有效的提高对机器人各个方向的检测,并根据机器人质量以及占地面积、摩擦力等多种因素进行检测,使得后期在分析机器人的动力中,数据更加精准,使得整体的分析系统的精准性得到提高,完善现有分析系统中的不足。
附图说明
图1为本发明的系统示意图。
具体实施方式
2.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
3.实施例1
4.请参阅图1,本发明提供一种技术方案:机器人动力学分析系统,包括用于接收所有分析数据以及结构的cpu单元,cpu单元的输出端上连接有用于对机器人的外形进行检测的外形检测单元,以及用于对机器人的动力进行检测的动力检测单元,通过本发明的设计,可以有效的提高对机器人各个方向的检测,并根据机器人质量以及占地面积、摩擦力等多种因素进行检测,使得后期在分析机器人的动力中,数据更加精准,使得整体的分析系统的精准性得到提高,完善现有分析系统中的不足;
5.外形检测单元包括用于对需要分析的机器人体积进行检测的体积检测模块,以此获得机器人所有的体型数据,与其他机器人进行分类,同时采集的数据具有单一性和唯一性的特性,在多个机器人检测中,便于分类;
6.用于对机器人的总质量进行检测计算的质量测量模块,以此计算出机器人在运动中,不考虑摩擦力的前提下,需要多少的动力才能够带动机器人运动;
7.用于对机器人在运行中所产生的摩擦力进行计算的摩擦检测模块,用于计算在机器人在正常运行中所耗费的动力值;
8.以及用于对所检测机器人的外观检测的形状扫描模块,通过对外观的扫描,来判断机器人在运行过程中,所受到的风阻大小。
9.本实施例中,优选的,体积检测模块包括用于对机器人中所有的轴检测的轴模块,以及用于对机器人整体中所有的快状物检测的块模块,通过多个小部件的检测,使得检测的效果更加精准。
10.本实施例中,优选的,摩擦检测模块包括用于对机器人底部与放置面之间的摩擦力进行检测的接触端检测组件,以及用于对机器人轴与轴、轴与块之间的摩擦力进行检测的连接段检测组件,该组件主要用于对机器人自身产生的摩擦力进行检测。
11.本实施例中,优选的,外形检测单元与动力检测单元的输出端上连接有主分析模块,该主分析模块用于将采集的数据进行计算、归纳、整理,以此得出最终稿的动力分析报告。
12.本实施例中,优选的,主分析模块的输出端与cpu的输入端相连接,用于将分析报告的上传。
13.本实施例中,优选的,主分析模块上连接有备份模块,该备份模块用于将主分析模块的数据进行备份,避免丢失出现数据无法找回的现象,该备份模块与外部终端无线传输连接。
14.本实施例中,优选的,外部终端为手机、平板。
15.实施例2
16.请参阅图1,本发明提供一种技术方案:机器人动力学分析系统,包括用于接收所有分析数据以及结构的cpu单元,cpu单元的输出端上连接有用于对机器人的外形进行检测的外形检测单元,以及用于对机器人的动力进行检测的动力检测单元,通过本发明的设计,可以有效的提高对机器人各个方向的检测,并根据机器人质量以及占地面积、摩擦力等多种因素进行检测,使得后期在分析机器人的动力中,数据更加精准,使得整体的分析系统的精准性得到提高,完善现有分析系统中的不足;
17.外形检测单元包括用于对需要分析的机器人体积进行检测的体积检测模块,以此获得机器人所有的体型数据,与其他机器人进行分类,同时采集的数据具有单一性和唯一性的特性,在多个机器人检测中,便于分类;
18.用于对机器人的总质量进行检测计算的质量测量模块,以此计算出机器人在运动中,不考虑摩擦力的前提下,需要多少的动力才能够带动机器人运动;
19.用于对机器人在运行中所产生的摩擦力进行计算的摩擦检测模块,用于计算在机器人在正常运行中所耗费的动力值;
20.以及用于对所检测机器人的外观检测的形状扫描模块,通过对外观的扫描,来判断机器人在运行过程中,所受到的风阻大小。
21.本实施例中,优选的,体积检测模块包括用于对机器人中所有的轴检测的轴模块,以及用于对机器人整体中所有的快状物检测的块模块,通过多个小部件的检测,使得检测的效果更加精准。
22.本实施例中,优选的,摩擦检测模块包括用于对机器人底部与放置面之间的摩擦力进行检测的接触端检测组件,以及用于对机器人轴与轴、轴与块之间的摩擦力进行检测的连接段检测组件,该组件主要用于对机器人自身产生的摩擦力进行检测。
23.本实施例中,优选的,外形检测单元与动力检测单元的输出端上连接有主分析模块,该主分析模块用于将采集的数据进行计算、归纳、整理,以此得出最终稿的动力分析报告。
24.本实施例中,优选的,主分析模块的输出端与cpu的输入端相连接,用于将分析报告的上传。
25.本实施例中,优选的,主分析模块上连接有备份模块,该备份模块用于将主分析模块的数据进行备份,避免丢失出现数据无法找回的现象,该备份模块与外部终端无线传输连接。
26.本实施例中,优选的,外部终端为手机、平板、电脑。
27.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。