1.本发明涉及影像检测技术领域,具体而言,涉及一种边界检测装置及其方法。
背景技术:
2.计算机对于影像的辨识相关技术中,影像边界、轮廓的辨识相当基础且重要,如何从影像中清楚界定出边界、轮廓,以供计算机判读后决定机械的工作范围,如机械手臂如何定点拿取物品、割草机如何决定割草范围等。也因此,本创作者认为如何提升影像的边界检测、辨识的质量相当重要,因而着手开始思考提升的方法。
技术实现要素:
3.本发明解决的问题是提升影像的边界检测、辨识等相关问题。
4.为解决上述问题,本发明提供一种边界检测装置,其特征在于,包括:
5.一空拍机:用以拍摄一区域而得到一空拍影像数据;
6.一图像处理单元:信息连接所述空拍机,所述图像处理单元可供将所述空拍影像数据根据公式将所述空拍影像数据由rgb色彩空间转至xyz色彩空间,再根据公式:
[0007][0008][0009]
其中,xn=0.9515yn=1.0000zn=1.0886
[0010][0011]
将所述空拍影像数据由xyz色彩空间转至lab色彩空间,而得到一lab色彩影像数据,再根据所述lab色彩影像数据运算出一亮度特征数据及一色彩特征数据;接着所述图像处理单元取一第一至第八圆形屏蔽,各圆形屏蔽分别具有一分界线而将各屏蔽区分成左右二半圆,且左右二半圆的颜色相异,所述第一至第八圆形屏蔽的分界线,由所述第一圆形屏蔽的分界线开始依序顺时针相差22.5
°
;
[0012]
所述图像处理单元利用所述第一至第八圆形屏蔽对所述lab色彩影像数据中的各
影像点进行光影强弱运算,而得到一纹理特征数据;
[0013]
所述影像数据根据所述亮度特征数据、所述色彩特征数据、及所述纹理特征数据进行运算得到一第一影像边界轮廓数据。
[0014]
与现有技术相比之下,本发明创作特色在于:
[0015]
使用八个分界线角度相异的圆形屏蔽顿每个影像点进行光影强弱运算,如此一来,当所述影像数据根据所述亮度特征数据、所述色彩特征数据、及所述纹理特征数据进行运算得到所述第一影像边界轮廓数据,所述第一影像边界轮廓有较佳的轮廓曲线,而更贴近真实影像的边界轮廓。尤其当影像利用多值化进行轮廓分析时,利用本创作可以得到更佳的轮廓分析效果,以提升整体影像的边界检测、轮廓辨识的质量。
[0016]
根据专利法第31条的规定,本说明书同时提出一种边界检测方法,其特征在于,包括以下步骤:
[0017]
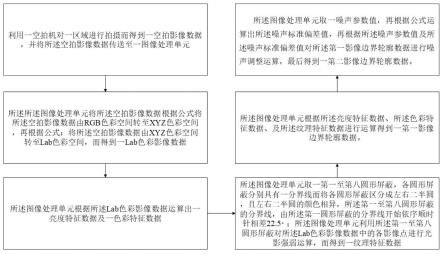
(1)利用一空拍机对一区域进行拍摄而得到一空拍影像数据,并将所述空拍影像数据传送至一图像处理单元;
[0018]
(2)所述所述图像处理单元将所述空拍影像数据根据公式将所述空拍影像数据由rgb色彩空间转至xyz色彩空间,再根据公式:
[0019][0020][0021]
其中,xn=0.9515yn=1.0000zn=1.0886
[0022][0023]
将所述空拍影像数据由xyz色彩空间转至lab色彩空间,而得到一lab色彩影像数据;
[0024]
(3)所述图像处理单元根据所述lab色彩影像数据运算出一亮度特征数据及一色彩特征数据;
[0025]
(4)所述图像处理单元取一第一至第八圆形屏蔽,各圆形屏蔽分别具有一分界线而将各屏蔽区分成左右二半圆,且左右二半圆的颜色相异,所述第一至第八圆形屏蔽的分界线,由所述第一圆形屏蔽的分界线开始依序顺时针相差22.5
°
;所述图像处理单元利用所述第一至第八圆形屏蔽对所述lab色彩影像数据中的各影像点进行光影强弱运算,而得到一纹理特征数据;
[0026]
(5)所述图像处理单元根据所述亮度特征数据、所述色彩特征数据、及所述纹理特征数据进行运算得到一第一影像边界轮廓数据。
附图说明
[0027]
图1为本创作各组件链接示意图;
[0028]
图2为本创作步骤流程图;
[0029]
图3为各屏蔽示意图;
[0030]
图4为螺旋动作路径示意图。
[0031]
附图标记说明:
[0032]
1-空拍机;11-第一定位单元;2-图像处理单元;3a~3h-圆形屏蔽;31a~31h-分界线;4-处理单元;5-google map;6-割草机;61-第二定位单元;7-虚拟基站实时动态测量系统;8-草地轮廓区块。
具体实施方式
[0033]
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
[0034]
实施例1:
[0035]
本发明创作是关于一种边界检测装置及其方法,首先介绍边界检测装置,其特征在于,包括:
[0036]
一空拍机1:
[0037]
请参阅图1,所述空拍机1用以拍摄一区域而得到一空拍影像数据。所述区域可以是街景、绿地、山地等,主要是根据使用者需求进行拍摄。
[0038]
一图像处理单元2:
[0039]
请参与图1配合图2,所述图像处理单元2信息连接所述空拍机1,以供接收所述空拍机1所拍摄的所述空拍影像数据。所述图像处理单元2可供将所述空拍影像数据根据公式,将所述空拍影像数据由rgb色彩空间转至xyz色彩空间,再根据公式:
[0040][0041][0042]
其中,xn=0.9515yn=1.0000zn=1.0886
[0043][0044]
将所述空拍影像数据由xyz色彩空间转至lab色彩空间,而得到一lab色彩影像数据,再根据所述lab色彩影像数据运算出一亮度特征数据及一色彩特征数据。接着请参阅图3,所述图像处理单元2取一第一至第八圆形屏蔽3a~3h,各圆形屏蔽3a~3h分别具有一分界线31a~31h而将各屏蔽3a~3h区分成左右二半圆,且左右二半圆的颜色相异,所述第一至第八圆形屏蔽3a~3h的分界线31a~31h,由所述第一圆形屏蔽3a的分界线31a开始依序顺时针相差22.5
°
。
[0045]
接着,所述图像处理单元2利用所述第一至第八圆形屏蔽3a~3h对所述lab色彩影像数据中的各影像点进行光影强弱运算,而得到一纹理特征数据。再来,所述图像处理单元2根据所述亮度特征数据、所述色彩特征数据、及所述纹理特征数据进行运算得到一第一影像边界轮廓数据。
[0046]
本创作主要透过8个圆形屏蔽3a~3h对所述lab色彩影像数据中的各影像点进行光影强弱运算,如此一来使得所述第一影像边界轮廓数据具有较佳的边界轮廓检测、辨识效果。不仅如此,本创作不管用于多值化影像分析或是二值化影像分析时,均可进一步提升整体的辨识检测效果,以解决背景技术所述不足之处。
[0047]
实施例2:
[0048]
当所述第一影像边界轮廓数据建立后,为了凸显影像中重要轮廓,本创作可进一步利用噪声设定的方式,将重要轮廓以外的影像作为背景,以突显出作为前景的重要轮廓,因此请参阅图1及图2所示,本创作进一步可以实施为:所述图像处理单元2取一噪声参数值,值,再
[0049]
根据所述噪声参数值及所述噪声标准偏差值对所述第一影像边界轮廓数据进行噪声调整运算,最后得到一第二影像边界轮廓数据。
[0050]
实施例3:
[0051]
当本创作用于自动草地维护、保养、修剪时,可透过辨识所述第二影像边界轮廓数据中属于草地的部分,接着标上坐标位置后,以供后续进行自动草地维护、保养、修剪。为此,本创作再进一步可以实施为所述空拍机1设有第一定位单元11,所述第一定位单元11可供测得所述空拍机1的经纬度坐标,如此一来,所述空拍影像数据内便包括有一经纬度坐标数据;所述第二影像边界轮廓数据报括一草地轮廓区块8;一处理单元4根据所述经纬度坐标数据于google map5找到一比对影像数据,且所述比对影像数据对应所述第二影像边界轮廓数据,所述处理单元4根据所述比对影像数据与所述第二影像边界轮廓数据,找出所述草地轮廓区块8的经纬度,得到一草地轮廓经纬度数据。
[0052]
由于google map 5中均具有各影像位置的经纬度信息,所以透过本实施例,可用最简单的方式找出所述第二影像边界轮廓数据中,所述草地轮廓区块8的轮廓经纬度,如此一来便可透过自动化机器人对草地进行自动化维护、保养、修剪。
[0053]
实施例4:
[0054]
请参阅图1及图2,更设一割草机6,所述割草机6信息连接所述处理单元4,所述割草机6设有一第二定位单元61,所述第二定位单元61可供信息连接一虚拟基站实时动态测量系统7(virtual base station real-time kinematic,vbs-trk),以供即使取得所述割草机6的动态经纬度坐标数据;所述割草机6根据所述动态经纬度坐标数据与所述草地轮廓经纬度数据进行移动。
[0055]
当本创作透过前述得到所述草地轮廓经纬度数据后,便可利用所述草地轮廓经纬度数据让所述割草机6自动对所述草地范围进行割草等动作,而动作的过程中透过所述虚拟基站实时动态测量系统7可以得到非常精准的定位效果,使得整体定位误差在公分级,令整体具有较佳的割草效果。
[0056]
实施例5:
[0057]
请参阅图1、图2及图4所示,所述处理单元4根据所述草地标记区块设定由外向内的螺旋动作路径,所述处理单元4根据所述比对影像数据找出所述螺旋动作路径的螺旋动作路径经纬度数据;所述割草机6根据所述动态经纬度坐标数据及所述螺旋动作路径经纬度数据,沿所述螺旋动作路径移动。
[0058]
请参阅图4,所述割草机6由所述草地标记区块中最外轮廓开始进行割草,利用由外而内的螺旋式移动方式,可有效的将所述草地标记区块的草全数割尽而不易有遗漏,同时,也透过此种螺旋式移动方式,相较于杂乱无章的割草方式,除了具有最佳的割草效果外,同时还可以降低割草时所需的时间,以提升整体割草的效果及效率。图4中箭头方向代表所述螺旋动作路径。
[0059]
根据专利法第31条的规定,本说明书同时提出一种边界检测方法,由于所述边界检测方法的优点、特色相关说明类似前述边界检测装置,故以下说明书仅介绍边界检测方法,对于其相关优点、特色等说明便不再赘述。所述边界检测方法其特征在于,包括以下步骤:
[0060]
(1)利用一空拍机1对一区域进行拍摄而得到一空拍影像数据,并将所述空拍影像数据传送至一图像处理单元2;
[0061]
(2)所述所述图像处理单元2将所述空拍影像数据根据公式将所述空拍影像数据由rgb色彩空间转至xyz色彩空间,再根据公式:
[0062][0063][0064]
其中,xn=0.9515yn=1.0000zn=1.0886
[0065][0066]
将所述空拍影像数据由xyz色彩空间转至lab色彩空间,而得到一lab色彩影像数据;
[0067]
(3)所述图像处理单元2根据所述lab色彩影像数据运算出一亮度特征数据及一色彩特征数据;
[0068]
(4)所述图像处理单元2取一第一至第八圆形屏蔽3a~3h,各圆形屏蔽3a~3h分别具有一分界线31a~31h而将各圆形屏蔽3a~3h区分成左右二半圆,且左右二半圆的颜色相异,所述第一至第八圆形屏蔽3a~3h的分界线31a~31h,由所述第一圆形屏蔽3a的分界线31a开始依序顺时针相差22.5
°
;所述图像处理单元2利用所述第一至第八圆形屏蔽3a~3h对所述lab色彩影像数据中的各影像点进行光影强弱运算,而得到一纹理特征数据;
[0069]
(5)所述图像处理单元2根据所述亮度特征数据、所述色彩特征数据、及所述纹理特征数据进行运算得到一第一影像边界轮廓数据。
[0070]
实施例1:
[0071]
于所述步骤(5)之后更增加一步骤(6):所述图像处理单元2取一噪声参数值,于所述步骤(5)之后更增加一步骤(6):所述图像处理单元2取一噪声参数值,再根据所述噪声参数值及所述噪声标准偏差值对所述第一影像边界轮廓数据进行噪声调整运算,最后得到一第二影像边界轮廓数据。
[0072]
实施例2:
[0073]
所述步骤(1)中,所述空拍机1设有第一定位单元11,所述第一定位单元11于所述空拍机1拍摄时同时测得所述空拍机1的经纬度坐标,以供所述空拍影像数据报括一经纬度坐标数据;所述步骤(5)中,所述第一影像边界轮廓数据报括一草地轮廓区块8;于步骤(6)后更设一步骤(7):一处理单元4根据所述经纬度坐标数据于google map 5找到一比对影像数据,且所述比对影像数据对应所述第二影像边界轮廓数据,所述处理单元4根据所述比对影像数据与所述第二影像边界轮廓数据,找出所述草地轮廓区块8的轮廓经纬度,得到一草地轮廓经纬度数据。
[0074]
实施例3:
[0075]
于步骤(7)后更设一步骤(8):一割草机6信息连接所述处理单元4,所述割草机6设有一第二定位单元61,所述第二定位单元61可供信息连接一虚拟基站实时动态测量系统7(virtual base station real-time kinematic,vbs-trk),以供即使取得所述割草机6的动态经纬度坐标数据;所述割草机6根据所述动态经纬度坐标数据与所述草地轮廓经纬度数据进行移动。
[0076]
实施例4:
[0077]
于步骤(7)及步骤(8)之间更设一步骤(9),所述处理单元4根据所述草地标记区块设定由外向内的螺旋动作路径,所述处理单元4根据所述比对影像数据找出所述螺旋动作路径的螺旋动作路径经纬度数据;所述步骤(8)中:所述割草机6根据所述动态经纬度坐标
数据及所述螺旋动作路径经纬度数据,沿所述螺旋动作路径移动。
[0078]
虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
