1.本发明涉及航空、事件模拟和预测,以及用于决策支持的人工智能系统领域。本发明进一步涉及提供实时紧急事件建模和评估不同的潜在安全着陆选项,以支持响应飞行紧急情况的飞行器飞行员。
背景技术:
2.在飞行器上,包括但不限于飞机,在预期的飞行例程过程中可能出现各种紧急情况。
3.尤其是,在低高度飞行过程中(例如,在起飞或着陆期间),飞行器可能经历包括由发动机产生的推力突然降低的紧急情况。发动机动力的降低或损失可能需要从预期的飞行路径到安全的、先前未计划的本地着陆点的意外和时间关键的转移。
4.最严重的情况可能需要飞行员试图将飞行器着陆在具有适当机翼间隙(例如附近的高速公路)的地面上的任何近乎平坦、延伸的表面上,飞行器和地面上的人员有坠毁和受伤的所有严重风险。然而,其他紧急情况,尽管仍然严重,但允许飞行员有足够的操作纬度寻找附近的机场,从而试图更常规和安全的着陆。
5.在遗留飞行器中,当飞行器遇到迫在眉睫和意外需要紧急着陆的情况时,飞行器飞行员可以依赖于空中交通管制员来提供与可能着陆点有关的必要信息。空中交通管制员能够手动整合/联合来自不同来源的数据以提供合适的响应。空中交通管制员还能够在其终端的计算机系统上运行模拟来计算飞行器到达的距离。然而,依靠由地面管制员启动/运行的地面控制器、地面控制研究以及均会导致时间延迟;这种时间延迟会在紧急情况下产生重大影响,并降低飞行器安全着陆的可能性。
6.存在用于自动着陆飞机的遗留机载系统,其中包括选择可能的着陆点。然而,这些遗留系统假设是一个功能齐全的飞行器。其不包含环境条件(诸如风向、风速、能见度或降水),也不包括飞行器自身条件中的这些机载遗留系统因素。遗留系统也不会:(i)运行模拟以评估不同潜在着陆点成功的可能性;(ii)不协助飞行员作出与着陆有关的任何决策,而是完全接管飞机的控制权。遗留系统被限定为考虑到一个问题,该问题假设一个功能正常的飞机但一个受损害(compromised)的飞行员(“好飞机,受损害的飞行员”)。
7.那么,需要的是,一种用于“受损害的飞机,好飞行员”的情况的系统和方法。这种解决方案提供机载紧急着陆决策支持,以协助(其表现未受损害的)飞行员着陆;其中系统和方法在飞行器部分受损害,并且唯一可行的选择是紧急着陆的情况下的提供这种支持。
技术实现要素:
8.本系统和方法(在本文中指多个术语,包括低高度转向协助(lada))协助飞行员在由于紧急情况(例如推力损失)需要在低高度进行转向(diversion)的情况下做出决策。
9.一旦检测到紧急情况和相关联的转向需求,系统就会生成在给定飞机的当前状况下,飞机可到达的可选机场的列表,以及飞机的近未来状况的模拟;模拟还考虑了潜在着陆
achievable landing perimeters)。
26.图10呈现了用于预先计算模拟飞行着陆路径和着陆成功概率的示例性方法的流程图。
27.图11示出了示例性飞行着陆路径模拟的一些元件。
28.图12呈现了示例性可扩展着陆选项评估模块的框图。
具体实施方式
29.以下详细描述在本质上仅是示例性的,并且不旨在限制系统和方法、系统和方法的元件或步骤、系统和方法的应用及其在此公开的用途。进一步,无意将范围约束或限制于前述背景或概述中以及以下详细描述中提出的任何理论。
30.一、术语、多个实施例以及范围
31.本文将理解的是:
32.各种实施例的描述可以使用“包括”语言,指示系统和方法可以包括所描述的某些元件或步骤;但是,系统和方法还可以包括未描述的、或者可以结合其他实施例描述的、或者可以仅在附图中示出的、或者本领域公知的那些对于处理系统的功能是必需的其他元件或步骤。然而,本领域技术人员将理解,在一些特定情况下,可以可选地使用语言“基本上由
……
组成”或“由
……
组成”来描述实施例。
33.低高度转移(lad)是一种事件和/或行动,其中飞行器在低高度飞行时经历紧急情况(一般在起飞后不久或已经在进行计划的着陆尝试),其中紧急情况的性质要求飞行器从其原始预定飞行路径转移以进行安全着陆。
34.本系统和方法可以用几个完全等效的术语来指代,所有这些术语都具有相同的范围,并且所有这些术语在本文中仅是示例性的并且不是限制性呈现在各个实施例中。本文教导的系统和方法的术语可包括:“低高度转移协助”、“低高度飞行器转移系统和方法”、“用于紧急飞行器转移的系统和方法”、“用于需要紧急着陆的飞行器的决策支持系统”和“着陆转移协助”。
35.结合本文公开的一些实施例,在提及系统和方法时可以包括附加的短语或可选(例如
“…
人工智能[系统/方法]
…”
、
“…
实时
…”
、
“…
机载
…”
以及
“…
交互
…”
或者
“…
辅助
…”
代替
“…
协助
…”
)。
[0036]
此外,在某些点上,为了辅协助解,也可以使用单词或短语的重新排列或连接,例如,“转移协助”、“决策辅助协助”、“着陆转移协助”或“紧急着陆支持辅助”。也可采用首字母缩略词——“lada”(“低高度转移协助”)、“lda”(“着陆转移协助”)或“dssarel”表示“需要紧急着陆的飞行器的决策支持系统(decision-support system for aircraft requiring emergency landings)”。
[0037]
应当理解的是,采用的与任何特定实施例或多个实施例相关的名称或标签是描述性的,但不是限制性的。此外,所采用的一些短语可以描述本系统和方法的许多实施例,但不一定是所有实施例。
[0038]
概率:如本文所教导的,本系统和方法采用几种不同形式的“概率”。
[0039]
路径条件概率690:概率的一种形式是路径条件概率690,结合图6和本文其他地方详细讨论。路径条件概率690是在紧急着陆情况期间,某些环境条件504和/或飞行器条件
504将占优势或占主导地位的概率。(这种条件504可以包括空气速度、推力、温度和以下进一步讨论的其他因素)。具有相关联概率的任何这样的一组环境条件504可被用作确定潜在着陆路径580的模拟的一部分。路径条件概率690可以被认为是用于计算当前方法的输入,或者被认为是在当前方法过程中的中间计算。
[0040]
置信等级(confidence level)392/机场可达性392:第二种形式的概率可以被称为安全着陆概率392、置信等级392或机场可达性392中的任一种。置信等级/机场可达性392指计算出的特定目的地机场555将导致飞行器100安全着陆的可能性。安全着陆概率392、机场可达性或置信等级392一般是本系统和方法的计算的输出或结果。这将在下述进一步详细讨论。
[0041]
实时和实时紧急时间:如本文中使用的,“实时”一般指基于当前获得的数据的数字计算或处理,例如实时飞行器条件(位置、方向、推力或动力等级等)或实时环境条件(风速等)。也就是说,基本上在处理数据同时获得所需的数据。
[0042]“实时紧急时间”一般指飞行紧急情况的持续时间(从紧急情况的识别到最终结果,希望安全着陆),或指飞行紧急情况跨度内的较短的持续时间;此外,还需求在与在飞行器必须着陆之前识别可能的着陆点一致的一个时间范围内(通常以秒为单位,从五秒到可能一分钟)执行多次飞行着陆路径模拟。通俗地说,,“实时紧急时间”意味着当飞行员只有几分钟来实现安全紧急着陆时,本系统和方法经由建议的着陆选项来引导飞行员及其着陆决策,建议的着陆选项在紧急的实时情况下经由计算系统快速识别。
[0043]
一般而言:一般将理解的是,本系统和方法的不同实施例以及不同实施例的不同元件可以以未具体公开的各种方式组合。有时,元件或实施例可仅被称为“系统”或仅被称为“方法”,其中一个或另一个这样的术语可最容易地适用于特定上下文;但是应当理解的是,本公开教导了整体系统和方法的多个实施例。
[0044]
因此,本系统和方法的范围不受本文使用的任何系统和方法名称/标题的限制,也不受限于在书面公开和附图中教导的示例性实施例。本系统和方法的范围由所附权利要求限定。
[0045]
二、示例性飞行器和处理系统
[0046]
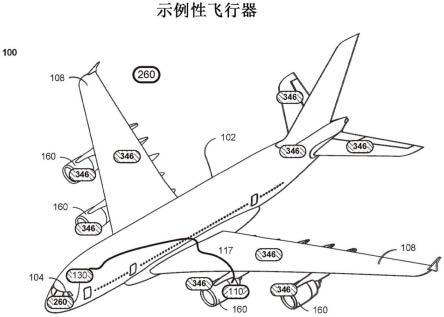
图1示出了根据本系统和方法的示例性飞行器100。飞行器100可以包括机身102、定位在机身102中的驾驶舱104,以及从机身102向外延伸的机翼组件108。飞行器100还可以包括多个发动机160。虽然已经示出了商用固定机翼飞行器100,但是可以设想本文描述的本公开的方面可以用于任何类型的固定机翼、旋转机翼或可转换机翼飞行器。
[0047]
控制器和航空电子设备:飞行器100可以包括一个或多个通用飞行器控制器130,统称为航空电子设备套件130,其可以是具有微处理器和存储器的数字控制器130。飞行器发动机160可以包括一个或多个发动机控制器110,其可以是完全授权数字控制器110(fadec)。合适的内部通信链路117(电、光纤或无线)使得能够在航空电子设备套件130和fadec 110之间进行数字和可能的模拟通信。飞行员控制和视觉显示器260链接到航空电子设备套件130。控制器还与各种飞行器传感器346连接以获得飞行器100的操作状态。
[0048]
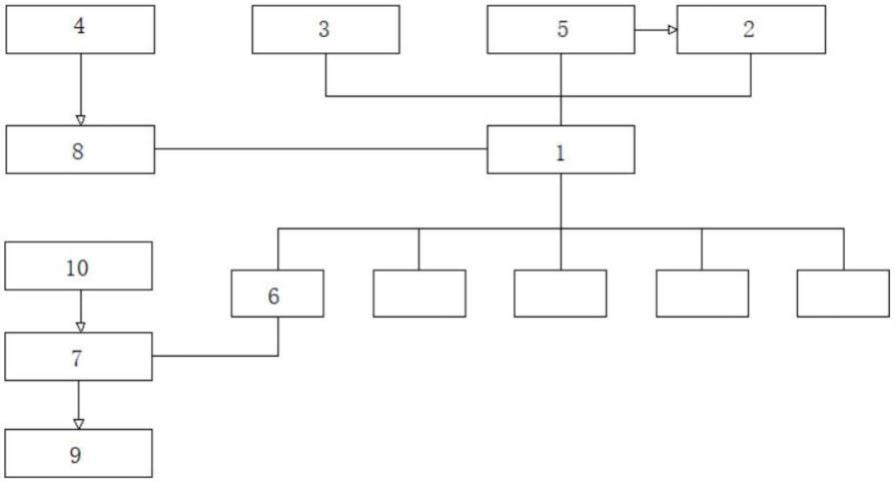
图2呈现了可根据本系统和方法采用的示例性控制器130(诸如数字计算机)的框图或系统等级图。数字控制器130可以实现或执行,例如,计算机代码(软件或固件),其使得飞行器能够执行本文中呈现的决策支持方法和相关方法。
[0049]
控制器130通常具有母板205,母板205通常保持和互连各种微芯片215/220/225以及易失性和非易失性存储器或储存器230/235,其一起在硬件等级实现控制器130的操作并且还能够实现本系统和方法的操作。控制器130可包括但不限于:
[0050]
硬件微处理器215,也称为中央处理器(cpu)215或微控制器(mcu)215,其提供控制器130的总体操作控制。这包括但不限于从数据文件或从其他计算机的连接接收数据、从目标硬件平台接收数据以及将数据或文件发送到目标硬件平台。微处理器215还被配置为执行实现本发明的系统和方法所需的算术和逻辑操作。
[0051]
静态存储器或固件220可储存非易失性操作代码,包括但不限于,操作系统代码、用于本地处理和分析数据的计算机代码、以及可具体用于使控制器130能够在所附权利要求的范围和精神内实现本文中描述的方法和其他方法的计算机代码。cpu 215可以采用储存在静态存储器220和/或动态存储器230和/或非易失性数据储存器235中的代码来实现本文中描述的方法和其他方法。
[0052]
控制电路225可以执行各种任务,包括数据和控制交换,以及输入/输出(i/o)任务、网络连接操作、总线212的控制以及处理系统领域中公知的其他任务。控制电路225还可以控制非易失性数据储存器235或与非易失性数据储存器连接,以及与飞行器传感器346连接。
[0053]
控制电路225还可以支持诸如外部输入/输出(例如,未在图中示出的,经由usb端口、以太网端口或无线通信)之类的功能。
[0054]
易失性存储器230,诸如动态ram(dram),可用于临时储存数据或程序代码。易失性存储器230还可用于临时储存来自静态存储器220的一些或全部的代码。
[0055]
非易失性储存器235可以采取硬盘驱动器、固态驱动器(包括闪存驱动器和存储卡)、磁带上的记录、dvd或类似光盘上的储存、或现在已知或待开发的其他形式的非易失性储存器的形式。
[0056]
系统总线212提供cpu 215、存储器220、230以及非易失性数据储存器235之间的数据通信。驾驶舱信息系统260,可以是可视的(显示屏或可视投影)、音频或两者,可以集成到控制器130中或与控制器130通信联接,以便将飞行数据呈现给飞行器的飞行员或副飞行员。经由驾驶舱信息系统260呈现的飞行数据可以包括,在其他元件中,本系统和方法的紧急飞行着陆选项350(参见下述图3)。
[0057]
语音、机械或触觉输入装置(260)还可以与控制器230通信地联接,从而使飞行员或副飞行员可以选择或改变控制器130的操作(并且由此也可以选择或改变飞行器100的操作)。
[0058]
三、低高度飞行器转向决策支持系统及方法
[0059]
问题概述:飞行紧急情况和飞行器转移
[0060]
本系统和方法涉及空中运输工具的安全性,并且在这里讨论的实施例中涉及飞行器的安全。相关领域的技术人员将认识到的是,在这里未详细公开的其他实施例中,该系统和方法也适用于其他形式的空中运输,诸如直升机。
[0061]
飞行中的航空公司(airline)通常有计划的、预定的航线,从第一个已知的机场起飞,大部分或全部经由预先计划的航线,可能由于意外天气或附近飞行器的其他航空紧急情况而需要一些航线变化,然后在第二个、指定的机场着陆。
[0062]
飞行器偶尔会遇到飞行中的紧急情况或干扰(disruptions)。在某些情况下,这种情况非常严重,足以使飞行器完全瘫痪,并且飞行器和机上人员的损失基本上是不可避免的。
[0063]
幸运的是,大多数飞行器紧急情况不那么严重。重大但中度的紧急情况(significant-but-moderate emergencies,sbse)可能,例如但不限于,包含:风暴造成的有限损害;由于发动机磨损、新软件或升级软件中的错误或“缺陷”或电气系统故障而导致的意外子系统故障或退化(degradation);小火;内舱或驾驶舱的完整性或安全性受损害;危险行李或行李的识别;突发性乘客疾病或受伤;遇到进入发动机的鸟;超出预期范围的环境温度(例如,这可能导致机翼过度结冰);和/或阻碍飞行器性能和/或飞行员对飞行器的控制,或对乘客和机组人员构成安全或健康风险的其他因素。
[0064]
这种sbse可能会严重到对飞往预定机场目的地的持续飞行构成风险。同时,sbse事件可能不会在立即使飞行器瘫痪或禁用,因此至少在短期内仍可试图安全着陆。然而,许多sbse具有这样的性质,即飞行器系统可能随着时间的推移而退化,需要在尽可能安全的附近着陆视线处尽快着陆(通常是非预期目的地机场的机场)。
[0065]
如果当飞行器在高高度(例如,在巡航高度)飞行时发生sbse,则飞行员和地面控制人员可能有足够的时间进行对话以考虑各种潜在的可选着陆点(比预定目标更近的机场,但仍有一定距离)。即使具有这种高高度转向,本系统和方法对于协助/增强关于飞行转向的飞行员-地面控制决策可能是有用的。
[0066]
某些sbse事件可能发生在飞行器处于低得多的高度时,例如飞行器起飞后不久,或者当飞行器至少开始着陆时。低高度紧急情况,尤其是那些使飞行器丧失飞行能力的迫在眉睫的风险,可能不允许有时间进行飞行员-地面控制对话。此外,在这种时间敏感的情况下,飞行员几乎没有时间识别并对可选着陆选项进行优先级排序(prioritize)。
[0067]
示例性着陆转向协助(lada)
[0068]
本系统和方法可称为着陆转向协助(或“lda”)300,或通过上述其他术语。lda 300经由合适的信息处理硬件和合适的处理算法来实现,并经由合适的数据库和实时紧急时间数据支持——如下文进一步描述的——它们一起被配置成为需要在紧急情况下快速评估不同着陆选项的飞行器飞行员提供智能、快速的决策支持。
[0069]
在本系统和方法的一些实施例中,以可感知的形式(视觉呈现和/或音频呈现)将决策支持实时呈现给飞行员。然而,在一些可选实施例中,决策支持的一些元件可能需要lda 300采取一些自动行动(例如,启动某些飞行器系统的激活或触发某些飞行器系统的停用),而无需先向飞行员呈现或由飞行员授权。例如,可以在飞行员可能选择某些紧急选项时采取这种自动行动。例如,可以将多于一组着陆坐标(对于多于一个机场)自动编程到自动驾驶仪中,以期望人类飞行员然后从呈现给飞行员的若干着陆选项中选择一个机场。
[0070]
图3呈现了示例性着陆决策协助(lda)300的框级系统图和用于评估紧急着陆选项的示例性方法390。
[0071]
lda 300的示例性元件包括软件模块(可能以固件被实现)、处理算法、数据储存、以及数据储存和检索算法,其被理解为经由数字处理系统130实现和运行,例如如上(图2)所示。在示例性实施例中,除非另有说明,否则lda 300硬件(包括处理系统130)和软件/固件,以及至少一些相关联的数据库储存,对于飞行器100都是本地的(即机载和集成到)。
[0072]
方法:示例性方法390包括以下步骤:
[0073]
步骤1:在第一步骤390.1中,lda 300识别紧急事件,也被称为如上所述的重大但可生存的紧急(sbse)事件。如本领域已知的,飞行器100部署有多种传感器346以确定所有:飞行器完整性;飞行器系统操作状态;飞行状态(速度、高度、方向等);和外部环境状态(风速、温度、湿度等)。基于实时传感器数据,一个或多个飞行器健康监测系统(hms)(图3中未示出)被配置成评估总体飞行状态并识别sbse事件。这种系统在本领域中是公知的,并且在本文中没有提供进一步的细节。
[0074]
步骤2:在第二步骤390.2中,响应于在步骤390.1中检测到的sbse,lda 300评估用于飞行器100的紧急着陆的可用选项。该评估部分地通过模拟多个可能的着陆选项来完成,其中可能包括多个本地机场之间的选择,以及到任何一个本地机场的不同飞行路径的选择。评估结果一般是多个不同的低高度转向建议350。对于每个转向推荐,lda 300识别所选选项(即,所选目标机场555)将导致安全着陆的置信等级392。
[0075]
lda 300一般在检测sbse的几秒钟内识别这些选项,然后在实时紧急时间内持续更新选项和置信等级,例如每秒一次或每二到五秒一次。因为着陆选项555可能非常接近飞行器100,并且还因为飞行条件和/或操作状态可能在一秒中迅速下降,所以lda 300还可以为每个着陆选项识别可用于飞行员实际选择和实施该选项的决策时间394(秒数)。出于相同的原因,lda 300可以进一步识别和评估置信等级分数衰减时间,这指示任何一个选项可能会以多快的速度丧失可行性。
[0076]
评估过程的详细信息在本文下文中进一步呈现。更新后的评估将作为一个持续过程进行实时评估,直到飞行器安全着陆。
[0077]
步骤3:在步骤390.3中,并且在本系统和方法的一个实施例中,lda 300可以经由驾驶舱显示/音频系统260向驾驶员或副驾驶员呈现低高度转向推荐350。
[0078]
在一个可选实施例中,响应于低高度转向推荐350,lda 300可以关于飞行器100采取一些自动校正或控制行动,或从飞行器100进行自动传输。
[0079]
仅作为非限制的一个示例,lda 300可以确定最高置信着陆选项要求立即、不延迟地降低飞行器起落架;在这样的确定之后,lda 300甚至可以在飞行员选择了特定选项之前可以自动尝试延伸(extend)起落架。作为另一个非限制性示例,lda 300可确定最高置信着陆选项要求飞行器立即、不延迟地升高(或降低)机翼襟翼,为高置信选项提供安全着陆的最大可能性;在这样的确定之后,lda 300甚至可以在飞行员选择了特定选项之前可以自动尝试调整机翼襟翼的位置。
[0080]
以上步骤的划分和顺序仅是示例性的,并且在某些情况下,某些步骤可以按照与本系统和方法一致的并行或可选顺序来执行。
[0081]
lda模块:在本系统和方法的一个实施例中,lda 300可以包括若干处理模块,这些处理模块一起工作以模拟可能的紧急着陆场景685,并且进一步提供对于各种紧急着陆选项的置信等级392和决策时间394的评估。这些模块可以实现为软件和/或固件,其共同指导cpu/mcu 215执行必要的计算和分析。
[0082]
在一些实施例中,在处理器215上运行的着陆选项评估模块(loam)305进行用于评估所需的逻辑和数学计算。在本文的下文中进一步呈现了示例性逻辑计算和分析的示例性细节。
[0083]
为了提供紧急着陆选项的实时紧急时间选项和评估,loam 305可能需求各种静态输入数据315,其可包括,例如但不限于:
[0084]
》》机场数据——附近机场的位置和能力;
[0085]
》》机场布局——附近机场的跑道布局和设施布局;
[0086]
》》地形数据——邻近飞行器和邻近附近机场的地貌区域的,包括机场跑道以外的潜在着陆点;
[0087]
》》其他附近潜在的支持服务(例如医院、消防站、海上救援服务);以及
[0088]
》》飞行器模型——当前飞行器的设计和配置数据,以及操作能力和限制,也称为飞行器模型。
[0089]
loam 305还可需求各种动态输入数据340,其可包括,例如但不限于:
[0090]
》》实时本地天气数据,包括温度、风速以及风暴数据,可以从机载传感器346和从远程、第三方天气服务报告或机场天气监测系统(基于地面或基于卫星)获得;和
[0091]
实时飞行器性能和状态数据344,其可以全部或部分地从飞行器的机载传感器346获得;但也可以全部或部分地从外部数据源获得,诸如附近机场的雷达系统。
[0092]
数据库管理系统(dbms)317——在本系统和方法的一个实施例中,静态输入数据315(机场、跑道、地形、飞行器模型)可以储存在lda 300自身内维护的数据库中,例如储存在非易失性储存器235中。lda 300可配置有数据库管理系统317以管理静态数据的储存和检索。dbms 317可以实现为本领域已知的几种标准数据库管理系统中的任一种个,或者实现为定制数据库管理系统317。
[0093]
语义虚拟数据层(svdl)310——在一些实施例中,当前系统和方法需要来自静态数据库315的数据和来自动态数据服务340的数据。可以从各种第三方报告服务获得动态数据服务340,动态数据服务340可以包括重要天气数据342以及其它实时环境数据。
[0094]
如相关领域的技术人员将理解的是,在实时紧急时间中处理所有数据需要相同类型的数据具有相同的数据格式,并且可以(经由数据字段标识符)被识别为相同类型或相同数据类别的数据。例如,风速数据必须识别为风速,温度或降水数据必须分别识别为温度和降水数据。但是,不能保证在机载系统(如lda 300)和非飞行器系统(如第三方天气数据)之间的数据标识符、数据标签或数据格式一致。
[0095]
为了解决这个挑战,并且在一些实施例中,lda 300可以采用语义虚拟数据层(svdl)310。svdl 310可以采用多种方法和算法来确定不同数据源之间正确数据结构和数据类型匹配。示例性svdl 310的详细操作超出了本文的范围,并且将不在此作进一步呈现。
[0096]
简化飞行路径模型——在一个实施例中,lda 300储存一个或多个简化飞行路径模型(sfpm)307,其用于潜在着陆路径的高速模拟。下述进一步讨论sfpm 307。
[0097]
用于确定紧急着陆选项的示例性方法
[0098]
图4呈现了用于评估紧急着陆选项的图3的示例性方法390的更详细的流程图,。上述已经讨论了步骤390.1和390.3,在此不再重复详细讨论。
[0099]
为方便起见,方法390的步骤390.2在图4中被重新标记为其本身的方法400,具有多个步骤400.n(n=1
…
7)。
[0100]
在步骤390.1中检测到紧急情况时,方法400从步骤400.1开始。在步骤400.1中,评估模块(load)305的着陆选项收集关于当前原位飞行器状态504的信息(参见下述的图5)。
状态信息可以包括,例如但不限于:飞行器的地理位置和机头方位;飞行器本身的当前操作条件;以及目前的天气和其他环境条件,诸如风速和降水。
[0101]
潜在候选机场和合理可用周界:在步骤400.2中,load 305从静态数据库315中列出的机场中选择潜在候选机场504.3。load 305可以被配置成基于各种标准来选择候选机场504.3,如本文下述进一步讨论的(尤其参见图9和下述的其他讨论)。因为情况是紧急情况,所以load 305一般预配置有适当的标准。
[0102]
在一个示例性实施例中,一个标准可以是任何候选机场必须在某个指定的、特定半径内,诸如(例如但不限于)距飞行器100的当前位置20英里、50英里、75英里或100英里。在一个实施例中,可接受的半径可以部分地根据飞行和航空器条件504而变化。例如,如果飞行器100保持至少部分发动机或飞行动力,则可接受的半径可以更大,而如果飞行器完全无动力飞行(即作为滑翔机),则可指定更短的半径。因此,可接受的半径确定了可能尝试着陆的潜在机场的合理可实现着陆周界(palp)900。
[0103]
值得注意的是,术语“合理可实现着陆周界”并不指定所有紧急着陆将是安全的区域。(甚至,任何紧急着陆都是安全的。)相反,术语“合理可实现着陆周界”是指定根据本系统和方法被视为用于计算在所确定的palp内的机场(或其他潜在着陆点)的模拟着陆结果是现实和合理的区域。如上所述,在一些实施例中,palp可以是距飞行器的固定半径。在可选实施例中,palp可根据当前飞行器状况、方向、速度、推力、操作状况、天气状况、燃料储备以及其他因素经由本系统和方法来确定。
[0104]
类似地,允许的半径可根据高度、当前飞行器速度、当前飞行器下降率以及类似因素而变化。候选机场555(参见图5)的选择还可以通过将当前飞行器安全着陆需要的跑道长度与也在静态数据库315中列出的在其他可接受半径内的机场的跑道长度进行比较来确定。候选机场555的选择还可以基于其他因素,诸如最近收集的关于机场跑道条件的数据。(在下述的图5中,从附近的机场504.3中选择候选机场555。)
[0105]
在步骤400.3中,load从系统存储器220、230检索简化的飞行器飞行路径模型307。在本系统和方法的一个实施例中,可以存储单个飞行器飞行模型307,并认为其适用于所有可能的紧急着陆。在可选实施例中,lda 300可储存两个或更多可选飞行路径模型307。一些模型可能比其他模型更复杂,或者需要比其他模型更大的计算强度,并且可以部分地基于飞行器可用于着陆的时间量的初始评估来确定要使用的模型的选择。(这种初始评估可以基于,例如,飞行高度、飞行下降率以及可用于着陆的最近和/或最远机场的距离。)
[0106]
一般来说,简化的飞行器飞行路径模型307是分段的飞行路径的二维或三维模型,其中分段根据需要大致形成一条曲线,以描绘到特定机场的航道(pass)。除了候选机场555恰好直接沿飞行器的当前轨迹的情况外,分段线性路径580不是真实飞行路径的现实表示,真实飞行路径将是弯曲的。然而,表示为一系列线性段的飞行路径580一般需要比连续弯曲飞行路径计算更少的计算。为了确定用于紧急着陆的最佳机场,并且由于着陆的精细细节一般将由人类飞行员处理,因此根据多个线性段识别各种潜在飞行路径的飞行路径模型可能足以评估各种候选机场的飞行着陆概率和风险。
[0107]
一般来说,本系统和方法的任何飞行器飞行路径模型307将是与在飞行器开发期间用于详细模拟的或在飞行器模拟器中用于飞行员训练目的飞行路径模型相比数学上简化的、相对轻重量(lightweight)的模型。
[0108]
在步骤400.4中,load 305为潜在着陆创建多个模拟场景。由于紧急情况和紧急着陆的固有时间压力,本系统和方法的目的是在短时间跨度内,例如在五秒、十秒或十五秒内,快速计算多个着陆情景685,尽管可以设想其他更长或更短的时间段。
[0109]
在这个(示例性的)五到十五秒的跨度中生成的多个着陆模拟场景685中,每个模拟场景可以在许多方面与其他场景不同。这些方面可以包括,例如但不限于:
[0110]
》》目的地候选机场;
[0111]
》》在特定目的地候选机场选择跑道;
[0112]
》》针对朝向候选机场的下降率的多个选择;
[0113]
》》针对朝向给定机场的行进的持续速率、行进的初始加速速率或行进的减速速率的多个选择;
[0114]
》》针对在下降期间襟翼的使用和起落架的延伸的各个选择;和
[0115]
》》确定飞行器的使用和用于着陆目的的可用资源的其他参数。
[0116]
不可避免地,这种选择必须考虑到当前紧急情况对飞行器施加的任何限制。例如,如果发动机不再提供动力,则加速下降率是不可实行的。如果只有一个发动机可用,或者如果一个机翼部分损坏,那么这些因素也必须作为每个模拟场景的一个要素来考虑。
[0117]
模拟场景685可以进一步随着从当前飞行器位置到给定目的地机场的飞行路径580的变化而变化。例如,如果潜在目的地机场基本上位于飞行器的后方,则飞行器在试图到达该机场时可以选择向左或向右倾斜;可以生成两个不同的模拟场景685,一个用于向左倾斜,另一个用于向右倾斜。然而,两条特定路径的选择还可根据潜在的障碍而变化,诸如建筑物或塔楼,这些障碍物在向左边倾斜与向右倾斜时可能会出现。每种情景还将考虑环境因素,诸如风速或降水。
[0118]
根据快速模拟的需求,飞行器飞行路径模型307可以采用各种简化。例如,即使在风速可变的阵风环境中,简化模拟模型307也可以假设来自基本恒定方向的基本恒定的风速。也可采用其他简化。下述将进一步讨论示例性简化飞行器飞行模型的元件。
[0119]
步骤400.5可以在步骤400.4之前、之后或同时进行。在步骤400.5中,将一个或多个延迟时间考虑到模拟场景中。延迟时间可以包括人为延迟时间,诸如考虑到飞行员可能需要几秒钟(或者甚至接近一分钟的时间段)来实际开始行动并选择着陆位置。延迟时间还可以考虑飞行器系统响应各种命令所需的时间,例如,延伸起落架需要多长时间。在创建模拟场景时,可以考虑这些延迟时间,这些延迟时间可以是预定义参数,或者可能是受某些条件约束的预定义参数。
[0120]
例如,在第一次检测到紧急情况时,load 305可被编程为假设飞行员将花费至少30s来完全掌握情况、评估着陆选择并开始行动。因此,模拟场景可以基于预计的飞行器在检测时刻的30秒后的位置。
[0121]
另一方面,如果飞行员在30秒标记之前没有开始行动,则系统可以假设飞行员仍在快速评估情况,并且因此可以假设在启动附加模拟的时间和飞行员实际采取行动的时间之间仅有五秒、十秒或十五秒的进一步延迟。
[0122]
在步骤400.6中,load 305评估机场可达性/置信等级392。机场可达性392可以被定义为作为行动时间延迟394的函数的每个目标机场555的成功率。换句话说,机场可达性392提供了在不同机场555进行安全着陆的概率的评估,假设飞行员行动将立即或在短时间
(例如五秒、十五秒或可能三十秒)内开始。到达不同机场并成功着陆的概率的计算基于由所有步骤400.2至400.5提供作为输出的各种数据。这种可靠性计算的详细信息在本文下述进一步呈现。
[0123]
在图4中,步骤400.1至步骤400.5作为连续的步骤呈现。这只是为了便于说明。在本系统和方法的实施例中,步骤400.1至400.5可以同时发生或以不同的顺序发生。
[0124]
在步骤400.6中,将模拟的结果呈现给飞行员用于优选的紧急着陆点的评估和最终人工确定。在步骤400.7中,为了更新潜在着陆场景685,load 305重新启动步骤400.1至400.6的序列。在本系统和方法的实施例中,这种重新启动最多每10秒发生一次,但可根据实际计算速度而变化。
[0125]
步骤400.7有几个潜在的目的。(i)如果飞行员尚未就着陆点作出决策,或尚未对特定着陆点开始行动,则更新的模拟情景350确定条件/情况是否已经改变,以至于在不同机场555安全着陆的概率已经改变。(ii)即使在飞行员已经开始向特定机场555下降的情况下,,其他着陆选择至少在短时间内仍然可用。航空器条件或环境条件(或两者)的进一步改变可能指示,可选选择突然有更好的机会成为安全着陆选项。在这种情况下,飞行员可能有选项和机会来调整他或她对着陆点的选择,以增加安全着陆的机会。(iii)在前往指定目的地紧急着陆点的途中,飞行员可根据任何数量的因素评估该着陆点不再是一个选项。例如,可能通过空中交通管制通知飞行员期望的跑道根本不可用于着陆。在这种情况下,飞行员必须选择可选着陆目的地555,并且基于持续模拟场景的持续更新为飞行员提供着陆点的最佳可能可用选项。
[0126]
在本系统和方法的实施例中,方法400仅在确定飞行器已经实现安全着陆时才有意地停止操作,或者模拟应当通过飞行员选择或其他事件终止。
[0127]
示例性模拟场景和着陆概率
[0128]
图5示出了可根据本系统和方法确定的示例性紧急着陆场景685的一些元件。
[0129]
面板502示出了示例性飞行情况和示例性飞行紧急情况的元件。在所示的示例性飞行情形中,飞行器100从始发机场550(机场abc)起飞。在起飞后不久,并且在往其预定目的地途中,飞行器100在事故位置560经历紧急事故。在这种情况下,事故可能包含飞行器100被鸟撞击,鸟被拉入喷气发动机160中并使两个喷气发动机都失去动力。(实际上,这种场景确实发生了,并导致飞行器100实际上“着陆”在附近的河流中,这不是期望的结果。)
[0130]
如所示的面板502,本系统和方法可以将几个潜在的附近机场504.3识别为潜在紧急着陆点555,例如,机场def和ghi(以及可能的附加机场klm和xyz,在面板1中未示出)。本系统和方法可以生成到这些机场555中的每一个的一个或多个模拟飞行路径580,这些机场555可以在优选的着陆半径内。
[0131]
在面板502中示出了用于尝试在机场def着陆的单个模拟飞行路径580。在本系统和方法的一些实施例中,并且如图所示,模拟飞行路径580可能仅包含两个线性段,而实际上如果飞行器要到达机场def,则飞行器需要采用连续弯曲的飞行路径。然而,在本系统和方法的一些实施例中,并且为了本模拟计算的目的,具有有限数量的线性段的模拟飞行路径可以足够用于手边的计算,同时减少计算时间。图中所示的两个飞行路径段580’,580”仅为示例,可以预想更多的线性段(580
’…
580.n,n》2)。在本系统和方法的其他实施例中,飞行路径模拟580可采用弯曲段。参见下述的示例图11和相关的讨论。
[0132]
面板504示出了用于生成用于着陆的模拟飞行路径580的一些示例性输入。这些可以包括飞行条件测量504.1、飞行器模型(504’.2),以及附近机场的纬度和经度(504.3)。在一个实施例中,如果始发机场550仍然是紧急着陆的潜在选项(如事故在起飞后不久发生,可能会出现这种情况),则附近机场(504.3)可以包括始发机场550。其他潜在的输入,包括结合各种实施例在本文其他地方讨论的,并且未包括在图中的那些。
[0133]
然后,按照上文已经讨论的方法400的步骤400.6,每个步骤的模拟被用于生成飞行器100及时到达机场555以进行安全着陆的可达性评估392或概率392。如面板506中所示,可计算成功着陆的可能性图590,其中置信等级392取决于飞行员开始着陆活动所花费的时间,包括进行机场选择,并且然后在事故事件560之后实际开始使飞行器100转向正确的方向。一组模拟场景506.1示出了几个不同机场的概率图590,假设飞行员在事件之后三十秒开始活动。进一步延迟的后果,一般导致降低概率,从飞行员显示器上更新的图表中可以迅速看出这一点。在强调快速决策的紧迫性的情况下,如果飞行员在事件560之后四十秒开始行动,则第二组模拟场景506.2指示成功的概率(在该示例性模拟中可以接近于零)。
[0134]
简化飞行器飞行路径模型
[0135]
一般而言,飞行器飞行路径模型是可用于计算假设飞行路径的数学框架(一般是方程组和/或方程的参数约束)。这种模型基于本领域熟知的方程,其中考虑了加速度、重力,以及线性和旋转动力学的物理基本力学定律;飞行器和飞行器机翼和襟翼的空气动力学模型;空气的流体动力学;模拟飞行器发动机性能的方程;天气/热力学方程式;以及对飞行器飞行具有重要意义的其他环境和工程现象的方程。现代飞行器飞行模型通常通过编码计算机程序来实现并且应用于特定飞行器和飞行场景,该计算机程序能够快速处理所有方程(具有其众多交互)和动态输入数据。
[0136]
由本系统和方法(上述结合示例性方法步骤400.3和400.4讨论的)采用的简化飞行器飞行路径模型(sfapm)307可以在不同示例性实施例中变化。在系统和方法的一些实施例中,简化的飞行路径飞行器模型(sfapm)307搜索和/或生成从任何飞行器位置到目的地机场555的最快路径,一般由于飞行器推力减小而具有约束。对于遇险的任何特定航空器100,以及对于任何选定的目的地机场555,sfapm 307可能会或可能不会找到解决方案,使飞行器100在以坠机的形式(通常,但不一定,在距机场或机场跑道不远处与地面碰撞)接触地面之前到达机场进行可存活着陆。
[0137]
一般而言,与可用于飞行器设计的飞行路径模型或用于飞行员模拟器中采用的飞行路径模型相比,本系统和方法的示例性简化的飞行路径模型307将包含计算中必要的简化,以便:(i)为多个不同的潜在目标机场中的每一个生成大量的可选飞行路径模型,(ii)多个不同潜在目标机场,(iii)在紧急情况下在可用的有限时间的一小部分内进行全部计算,以及(iv)根据处理器315的可用的处理能力,仅使用可用于机载实时处理的处理能力(power),这些处理能力在本文被提交(filed)时通常用于飞行器(或合理预期用于飞行器使用)。
[0138]
在本系统和方法的实施例中,safpm 307可以被配置成仅使用限于两个核心的单个多核心处理器的处理资源来计算到至少两个可选目的地机场中的每个的至少十个飞行路径。在本系统和方法的实施例中,简化的飞行路径模块307可被配置成仅使用限于两个核心的单个多核心处理器的处理资源来计算到至少三个可选目的地机场中的每个的至少二
十个飞行路径。在各种实施例中,用于计算飞行路径的允许时间跨度限制可以被限制为,例如但不限于五秒、十秒、二十秒、三十秒、四十五秒或一分钟。
[0139]
在本系统和方法的一些实施例中,简化的飞行路径模型307包括这样的假设,即飞行器不能保持稳定的高度(由于例如但不限于:推力损失、电气系统损坏或其他动力损失、飞行器结构完整性的部分损失(例如,机翼损坏或机身中的洞)),从而使飞行器100必须以基本可预测的下降速率强制下降。
[0140]
在各种实施例中,简化的飞行器飞行路径模型307包括变量或参数以及合适的方程,以基于诸如以下因素,来预测飞行路径和飞行矢量:(i)飞行器地理坐标、高度以及机头方向;(ii)飞行器重量;(iii)飞行器推力,包括当前推力和预期的可用推力;(iv)飞行器阻力系数;(v)飞行器空速,在检测到紧急情况时,以及飞行器由于重力和可用推力的持续施加(如果有的话)而期望加速时;(vi)飞行器下降速率(或爬升速率,如果有任何动力可用);(vii)飞行器倾斜角度(转弯时),可能由于飞行器损坏而受到限制;(viii)机场地理坐标、海拔以及跑道方向(因附近机场和跑道不同而不同);(ix)风速、风向;和(x)降水条件、能见度条件以及温度。
[0141]
在本系统和方法的各种实施例中,为了快速、有效的计算,简化的飞行器飞行模型307将有意排除一般会在更完整的模拟中考虑的一些因素(例如可能用于飞行员训练的飞行器模拟器)。对于仅一个非限制性示例,由于燃料使用导致的飞行器重量随时间的变化(其一般可被考虑用于详细的飞行模拟)可由于本模拟的非常短的时间跨度而被排除。(然而,如果例如紧急情况是由于快速燃料泄漏造成的,则简化的飞行模型可能被设计成将飞行器重量的变化考虑在内;或者如果该飞行器是军用或货运飞行器,在某些情况下可能会迅速“倾倒”一些有效载荷。)类似地,对于目前的目的,可以简化一些物理方程或飞行器性能模型化方程(例如,出于某些目的,可以省略一些二阶项),这仍然提供了足够的精确度。
[0142]
关于风速、风向、降水、可见度以及温度,在本系统和方法的一些实施例中,可以假设这些环境因素中的任何或所有在可用的飞行路径和可用于着陆的时间上基本上恒定。这样的假设可以实质上简化计算,从而减少生成必要的模拟所需的时间。
[0143]
在可选实施例中,可以进行一些有限的调整以考虑飞行路径上的环境中的潜在变化。例如,对于给定的选择的目的地555(特定的机场和特定的跑道),可能以不同的风速运行两个或甚至三个模拟(例如,假设恒定风速与在飞行事故瞬间检测到的风速相同的第一个模拟;然后是第二个模拟和第三个模拟,每个模拟采用不同的固定风速,其可以高于或低于当前风速,或者可能采用线性增加或减小的风速。)对沿飞行路径安全着陆的机会的最终评估可以基于三个场景的加权平均值。
[0144]
考虑到不同的风向、在短时间内(例如,在风暴环境中)降水的增加或温度的变化(例如,如果飞行器在冰冻雨中飞行,则可能增加短期结冰),可以设想类似的变化。
[0145]
生成紧急着陆飞行模拟场景的示例性方法
[0146]
图6是根据本系统和方法的用于生成飞行路径模拟580的示例性方法600的流程图。这里,方法400的方法步骤400.4被重新标记为其自身的方法600,具有多个步骤。方法600可以部分地或整体地由lda 300的着陆选项评估模块305执行。
[0147]
该方法从步骤610开始。在步骤610中,该方法获得关于飞行器条件和环境条件的参数504的适当实时值,例如但不限于:纬度、经度、高度、当前飞行器推力、当前风速、风向、
可用飞行器推力、温度、能见度和其他相关飞行/环境参数504。这产生了一组初始模拟参数504.1.1。
[0148]
步骤620是可选的但有益的。在步骤620中,除了在步骤610中获得的实时值之外,该方法还为每个参数504生成至少一个且通常为两个或更多可选值。例如,该方法可以为飞行器推力生成两个或更多可选值,为风速生成两个或更多附加值,等等。这使得每个参数(推力、风速、风向等)是多变量参数,具有基于当前、测量的,实时值(由传感器346测量)的一个值,并且可以从指定分布(例如,高斯分布或指数分布)或根据指示历史事件的某些经验分布(例如,已知风速分布)来确定附加值。结果是多组初始参数504.1.2,
…
,504.1.n。
[0149]
该可选值用作根据在可用于试图着陆的时间期间环境/飞行器状况的潜在或合理变化计算不同着陆情景685和低高度转向建议350的基础。在一个实施例中,并且对于每组飞行/环境参数504.1.n,步骤620还可以为每个生成的样本值生成发生概率。
[0150]
对于相关领域的技术人员来说显而易见的是,可选值的范围可能受到当前飞行器操作条件的限制。例如,在具有至少部分推力能力的飞行器中,有可能增加推力和/或高度。然而,如果确定飞行器100的发动机160完全不可用,则有可能不增加推力,并且高度的任何增加(例如,使用机翼襟翼调节或由于增加的迎风)可能非常局限或不可能。
[0151]
在步骤630中,方法600选择潜在着陆点504,诸如潜在的附近机场504.2。这将在下述进一步讨论。
[0152]
在步骤640中,该方法为每个目的地机场504.3的每个样本生成特定的模拟飞行路径580.n,其与其概率/置信等级392一起形成模拟场景500.n。根据简化的飞行器飞行路径模型(safpm)307的方程,考虑特定的机场504.3、一组飞行条件504.1以及飞行器模型504.2来计算每个模拟的飞行路径580.n。
[0153]
在步骤650中,该方法生成特定着陆路径场景可适用于每个模拟飞行路径580.n的概率。可以部分地基于在方法步骤620中确定的不同飞行条件504.1的可能性的权重来计算每个飞行路径的概率。
[0154]
用于生成着陆场景685的方法600仅是示例性的,并且不应被解释为限制性的。也可以采用附加的方法步骤或可选的方法步骤。
[0155]
识别机场可达性的示例性方法
[0156]
在本系统和方法的一些实施例中,不仅识别潜在目的地机场555(其有时可以包括始发机场550);但是为了进一步快速评估在每个可能的目的地机场555的安全、无坠机着陆的概率。
[0157]
图7呈现了根据本系统和方法,评估安全着陆的置信等级392(也称为“机场可达性”392或“到达机场的概率”392)的示例性方法700的流程图。这里,方法400的方法步骤400.6被重新标记为其自身的示例性方法700,具有多个步骤。
[0158]
示例性方法700可以被解释为上文描述的扩展或继续示例性方法600(参见图6),其生成着陆场景685并且尤其是用于模拟飞行路径580。在上述示例性方法600中,针对每个目的地机场555以及针对不同航空器条件范围504.1生成单独的场景。
[0159]
在一个实施例中,示例性方法700可以以类似于方法600的方式生成附加的场景500和飞行路径580,但是进一步考虑附加的区分因素,该附加的区分因素可以包括,例如但不限于:潜在着陆机场555处的两个或更多不同的着陆跑道,以及在飞行员行动实际开始之
前的不同行动延迟时间(以秒或分钟为单位)。
[0160]
示例性方法700从方法步骤710开始。在步骤710中,(从根据方法600分析的候选机场中)选择候选机场504.3进行分析。
[0161]
该方法继续进行步骤720。在步骤720中,生成多个着陆场景685,每个场景具有不同的路径模拟580.n。每个路径模拟580以与上述方法600类似的方式被确定,其中每个路径模拟考虑初始条件504.1,以及不同的飞行员行动延迟时间394。
[0162]
应当注意的是,行动延迟时间394是飞行员实际选择目的地并开始朝向目的地机场555的飞行行动(诸如改变飞行器100的方向)之前的时间量。可以在延迟时间的预定义列表中针对每个潜在行动延迟时间确定或计算路径模拟,该延迟时间列表可以包括(例如但不限于)5秒、10秒、15秒、20秒、30秒以及45秒。还可以识别其他可能的延迟时间。
[0163]
该方法继续进行步骤730。在步骤730中,对于在步骤720中生成的每个飞行路径580.n,该方法确定该飞行路径在目的地机场的安全着陆方面是否实际可行。如果飞行器能够到达目的地机场(和目的地跑道),并且相对于机场海拔保持正高度,则飞行路径580.n是可实行的或可行的。(如果模拟的飞行路径580.n显示飞行器为负高度,这意味着如果飞行器100奉行评估中的飞行路径580.n,则飞行器100将会坠落到地面。)
[0164]
简而言之,然后,方法700模拟到达目的地机场555的多个可能的飞行路径580.n,其中每个飞行路径在剩余时间的一组合理的可能飞行条件范围内进行模拟。根据航线路径580.n是否会导致安全着陆或坠机,每个航线580.n标记为“可行的”或“不可行的”,或由一些其他二进制(1/0)指定。结果是,对于在步骤710中选择的候选机场,多个可能的飞行场景现已生成,并且每个场景已经用路径结果795(在下述的示例性公式f1、f2立即由变量success_failure(n)表示)来评估。
[0165]
该方法继续进行步骤740。在步骤740中,根据示例性(和非限制性)公式中的任一个,对给定机场555的所有飞行路径场景580进行平均,可能地,通过条件概率690对每个飞行路径模拟580进行平均加权:
[0166]
(f1)
[0167]
(f2)
[0168]
在本系统和方法的一个实施例中,success_failure(n)795的值为0或1。即,根据导致成功着陆的飞行路径场景的数量的平均值(可能是加权平均值)来确定在任何给定机场成功着陆的置信等级795。
[0169]
图7包括具有这种计算的示例性结果的示例性表格780。
[0170]
相关领域的技术人员将理解的是,方法700仅是示例性的,并且可以在所附权利要求的范围和精神内设想其他类似的或更多的扩展计算。例如,在本系统和方法的一些实施例中,成功或失败(安全着陆或坠机着陆)的机会有时可能不以严格的二进制(1/0)项而是以介于0和1之间的等级(gradations)来评估。在这种情况下,公式f1和f2仍然适用,但是success_failure(n)可以是0;1;或其中间值,其中0《p《1。在一些实施例中,p可以仅假设一组有限的离散值(例如但不限于0、0.25、0.5、0.75、1),这可以降低计算复杂度。在本系统和
方法的可选实施例中,p可以假设值的连续范围。
[0171]
对于一个示例,在一些实施例中,飞行路径模拟可以包括着陆速度的评估,并且必须以大于某一安全阈值速度进行的着陆可以被分配0.5的成功/失败变化或某一其他值。对于另一个示例,在一些实施例中,飞行路径模拟可以包括飞行器起落架(诸如车轮、刹车或机翼襟翼)在着陆时是否将成功地将飞行器充分减速的评估,并且这里再次成功/失败的机会可以被分配在0和1之间的某个值。对于又一示例,在一些实施例中,本系统和方法可以包括,在着陆场景685和飞行路径模拟580中,评估飞行器上是否可能发生火灾,或者现有的小火是否可能在着陆的时间跨度内增长。
[0172]
在步骤740之后,该方法继续到步骤750。在步骤750中,该方法确定是否已经针对所有潜在着陆机场555模拟了潜在飞行路径580(550)。如果“是”,则方法停止。如果“否”,该方法将继续用于另一个潜在着陆机场555。
[0173]
行动延迟时间:根据上述讨论,“行动延迟时间”394是指着陆选项呈现给飞行员与飞行员实际选择选项并开始行动以将飞行器100带到选择目的地之间的时间(一般以秒为单位)。在本系统和方法的一个实施例中,对给定机场555的所有飞行路径场景580进行平均,一个场景580.n用于多组条件概率中的每组条件概率;并且进一步对于每个这样的组,对于可能的延迟时间范围的每个行动延迟时间进行一次模拟。在可选实施例中,可以采用一些计算的可选提前停止。如果给定行动延迟时间的成功率已经非常低,则该方法可以停止计算,停止对于更长的行动延迟时间进一步的计算。
[0174]
对于一个非限制性示例:根据模拟,对于5秒、10秒和20秒的行动延迟,机场abc可能是可行的着陆选项;然而,对于30秒的行动延迟时间,计算的成功着陆的机会可能会低于指定百分比(例如,低于30%)。在这种情况下,并且在一些实施例中,该方法可以不针对40秒或更长的行动延迟时间进行计算。)
[0175]
机场到达模型和改变/变化的环境条件
[0176]
在本系统和方法的一些实施例中,着陆模拟可以考虑环境条件504.1和/或飞行器条件504.1,这些环境条件和/或飞行器条件可以在紧急着陆过程中发生变化。在由用于生成着陆场景的示例性方法600和用来确定机场可达性的示例性方法700所进行的计算过程中,着陆选项评估模块(loam)305可以采用机场到达计算来评估各种不同的置信等级392,其中每个置信等级可以取决于紧急着陆期间可能改变的条件。
[0177]
图8呈现了用于考虑在紧急着陆过程中可能随时间变化的飞行条件或飞行器条件的示例性方法800。
[0178]
方法800从步骤810开始。在步骤810中,loam 305获得飞行器的当前飞行条件测量504.1,可以包括例如但不限于:纬度、经度、高度、方向、空速、推力、爬升速率等,以及本文中其他地方讨论的其他因素,以及由于紧急事件引起的其他约束。
[0179]
方法800继续进行步骤820。在步骤820中,loam 305获得飞行器的当前外部飞行环境504.1,其可以包括例如但不限于:风速、风向、降水以及温度。
[0180]
方法800继续进行步骤830。在步骤830中,loam 305生成一组或多组可选飞行条件504.1。这些可选飞行条件504.1可包括但不限于:进一步的推力损失、飞行器结构完整性的进一步损失、进一步的电力损失;以及外部环境的变化,例如但不限于:阵风、风向变化或降水增加或减少。
[0181]
方法800继续进行步骤840。在步骤840中,loam 305生成一组或多组着陆场景685,其中对于每组可选飞行条件504.1具有不同的着陆场景。
[0182]
方法800继续进行步骤850。在步骤850中,loam 305为每个着陆场景生成:(i)一个或多个飞行路径模拟580和(ii)路径结果795。
[0183]
方法800继续进行步骤860。在步骤860中,loam 305使用任何一个机场的多个飞行路径结果来为该机场生成置信等级392。
[0184]
可以根据如上所述的示例性方法390、400、600和700或者根据在所附权利要求的范围内的其他方法获得模拟结果580、795、392。
[0185]
方法800继续进行步骤860。在步骤860中,loam 305计算在每个机场安全着陆的置信等级392。
[0186]
生成紧急着陆飞行模拟场景并确定可达性的示例性方法
[0187]
相关领域的技术人员将理解以上结合图3,4,6,7和8(方法390,400,600,700,800)指示的方法和方法步骤仅是示例性的而不是限制性的。来自不同示例性方法390、400、600、700、800的方法步骤可以以不同顺序进行组合,并且可以采用与本系统和方法以及所附权利要求的范围一致的附加步骤或可选步骤。
[0188]
在本系统和方法的一些实施例中,生成紧急着陆飞行模拟并进一步确定可达性可能性的示例性方法“m”可能需要以下方法步骤或程序:
[0189]
(m1)迭代每个候选机场以进行紧急着陆:
[0190]
(m2)对于每个潜在目标机场,生成多个场景685,该场景685由关于飞行器条件504.1和环境条件504.1的各种参数的组合,以及行动的决策时间394组成。这些参数被设置为当前环境条件504的实际测量,或者与实际测量不同。基于所选择的参数给场景685分配相对的可能性。
[0191]
(m3)在模拟/建模开始时确定当前位置。当前位置可以是事件区域560,或者在飞行事件之后更新的位置(如果模拟方法被重复和更新两次或更多次)。
[0192]
(m4)使用飞行路径模拟模型307来评估飞行器100从当前位置的是否将具有在生成的每个场景下在机场504.3着陆的可行的飞行路径。如果有可行的飞行路线,该场景称为“成功”。
[0193]
(m5)拟合“成功”率的曲线396作为行动时间394的函数396,按场景可能性加权。
[0194]
(m6)评估所有被评估机场的成功率曲线,并决策采取行动的关键时间。
[0195]
(m7)在关键行动时间内按平均成功率对机场进行排名;并将平均成功率作为次要信息报告。
[0196]
机场到达模型和行动时间
[0197]
如以上在本文中所讨论的,本系统和方法的各种实施例可能包含确定合理可实现着陆周界(palp)900,并且进一步确定最大行动时间394(在本文中也称为决策时间394)。决策时间394被解释为,在将着陆选项呈现给飞行员时与飞行员必须开始着陆行动为了保持指示的置信等级392以在目标机场555安全着陆的的时间点之间可以经过的最大时间。
[0198]
以上已经描述了机场到达模型的一些元件,这种模型确定了用于模拟飞行路径580的合理可实现着陆周界900和周界内合适的附近机场555。
[0199]
合理可实现着陆周界900可以仅取决于距飞行器100的当前位置的径向距离,或者
取决于半径以及距飞行器的距离的附加因素。例如,palp 900可以基于固定半径值r;但是,相对于飞行器100的限定周界,可以向前延伸距离以将飞行器的当前方向和当前飞行速度都考虑在内。类似地,palp可以基于固定半径值r;但是,相对于飞行器100的限定周界可以缩短到飞行器的尾部,以考虑到:(i)飞行器的当前前进方向;(ii)飞行器的当前飞行速度;和(iii)到达飞行器后方的机场可能涉及由于紧急情况而可能受到阻碍的方向改变。
[0200]
图9示出了四个不同的示例性palp900,其具有各种潜在的机场555(550)、a、b、c、d和e,所有这些机场都落入这些周界中的至少一些周界内。可能列在附近机场504.3的数据库中的至少两个示例性机场f和g将被排除在紧急着陆模拟的任何考虑之外,因为其不属于palp的任何900。如果使用示例性周界900.1作为模拟的基础,则仅考虑机场a和b用于着陆模拟。类似地,如果示例性周界900.3被用作模拟的基础,则仅将机场b、d和c考虑用于着陆模拟目的。周界900的计算可以部分地基于用于本系统和方法的算法的选择,并且还基于用于计算渐进式更精细的palp的可用处理时间和动力。
[0201]
如果确定在可接受弧度内没有机场555,则load 305可以确定是否存在任何其他合适的目的地,例如扩展的露天田地/沙漠区域,或基本上线性的公路延伸。反过来,后者的确定,转而可以基于其他因素,例如,一天中的时间。(预计在一天中的大部分时间内充满汽车的一段高速公路可能会在一个数据库中记录为可能在晚上或清晨的时间内可能很少或没有汽车交通,因此可能是考虑着陆的可接受候选。)
[0202]
在本系统和方法的一个实施例中,可以由包括在模拟场景685中用于飞行员行动的各种潜在延迟时间,来评估到行动394的最大时间。例如,本系统和方法可以进行用于生成着陆场景685的方法600,所述着陆场景685具有基于不同延迟时间的不同路径模拟580。不同的延迟时间可以是从示例性和非限制性选项中选择的两个、或三个或更多延迟时间:一秒、两秒、三秒、五秒、七秒、十秒、十五秒、二十秒、三十秒和四十五秒。对于每个不同的延迟时间,然后可以根据示例性方法700或在所附权利要求的范围内的其他方法来确定机场的不同置信等级。
[0203]
解决计算挑战
[0204]
如上所述,本系统和方法是时间关键的。当飞行器100处于风险或紧急情况时,飞行员可能仅具有有限的时间来确定安全着陆选项。因此,通过数字处理计算和呈现这种选项的时间受到严重限制。该系统和方法还可能受到小型机载飞行器计算机的可用处理能力的限制。
[0205]
一般而言,如果机载计算机130使用oem高保真飞行路径模拟软件(或使用使用高保真分辨率计算的定制飞行路径模拟软件),则机载计算机130可能不足以在短时间内(以秒为单位)评估多个潜在着陆点555的许多潜在着陆场景685(每个着陆场景可能需要多个路径模拟580)。
[0206]
本系统和方法用许多潜在的解决方案来解决这个问题。本系统和方法的各种实施例可采用以下示例性、非限制性途径中的一种、几种或全部来实现有效计算:
[0207]
(i)本系统和方法可采用用于飞行器设计和/或用于飞行员训练的飞行器飞行模拟器的高保真飞行路径规划模型的分析可选(surrogate)模型307(简化飞行路径模型307),以实现快速机载计算。可选模型307可能仅需要根据近似飞行路径模拟来评估到达机场的可用的性,而不是产生详细的路径。
[0208]
(ii)本系统和方法可采用简化的基于物理的飞行路径规划模型进行快速计算。简化的物理模型可从计算中消除或提供简化模型,用于此类示例性的非限制性的飞行因素,诸如由空气引起的飞行器阻力(drag)、由大气压力变化引起的升力变化(因为预计模拟的着陆将在低高度进行)、由高度变化引起的有效发动机推力变化(假设发动机提供任何推力)、以及由燃料消耗引起的飞行器重量变化。在一些实施例中,在认为线性方程足以近似(对于短距离、或短时间间隔、或两者)实际上非线性的物理方程式的情况下,本系统和方法可以采用简化的物理方程式。也可采用其他简化。
[0209]
(iii)在本系统和方法的一些实施例中,一些紧急着陆场景可以是在起飞之前的预计算的。这将在下述进一步讨论。
[0210]
紧急前(地面或飞行中)预计算
[0211]
尤其是,对于始发机场550和预期目的地机场,本系统和方法可以预测在低高度起飞和着陆阶段期间可能发生的潜在(即,假设但合理的)紧急情况。对于沿原始飞行路径的离散位置,可以预先计算着陆场景和模拟着陆路径。
[0212]
在飞行期间可能发生的真实紧急情况的情况下,本系统和方法可以简单地从预先计算的表格中选择储存的最近的模拟飞行位置/条件,并将其作为解决方案呈现给飞行员。
[0213]
在可选实施例中,本系统和方法可以从紧急着陆解决方案的预计算表格中选择几条飞行路径:(i)用于附近位置和类似的飞行条件,以及(ii)指示安全着陆的高概率。本系统和方法随后仍可参与飞行路径解决方案的实时紧急时间模拟,但将选项(例如,限制附近机场的选择)仅限于在预计算模拟中导致最佳机场可达性392的那些选项。
[0214]
在又一个实施例中,本系统和方法可以在实际飞行紧急情况期间采用可应用的预先计算的飞行模拟的加权平均值,以快速获得机场可达性392的合理评估。
[0215]
在本系统和方法的一个实施例中,,可以由飞行器计算机/控制器130在发生任何紧急情况之前进行一些预计算或在飞行器仍在地面上(在跑道上,例如,等待起飞)时;或者当飞行器在前往目的地机场的途中时(在着陆期间预测和计划潜在的紧急情况)。
[0216]
图10呈现用于预先计算模拟飞行着陆路径和着陆成功概率的示例性方法1000的流程图。方法1000可以由具有与示例性飞行器控制器130相同或类似的处理能力的计算系统进行;或者可能是具有显著更大的处理能力和存储器的基于地面的计算系统。
[0217]
该方法从步骤1010开始。在步骤1010中,该方法接收具有指定出发机场和指定到达机场的特定预定飞行路线。
[0218]
在步骤1020中,该方法确定各种模拟参数。这些可以包括,例如,但不限于:
[0219]
1020.1——识别落入出发机场的第一合理可实现着陆周界900.1内和落入到达机场的第二palp 900.2内的各种飞行器,以及潜在的紧急着陆点555。
[0220]
1020.2——对于每个潜在的紧急着陆点555,该方法从当前可用的实时天气数据库中获得样本环境数据(该数据库可包括(i)在预期出发时出发机场的当前预期环境条件和(ii)在预期到达时目的地机场的当前预期环境条件)。
[0221]
步骤1020.2还可识别多个潜在危机情况,并将某些标称飞行器情况与每个潜在危机情况相关联。这种情况可能包括动力损失、发动机损失、在空中遇到鸟或其他障碍物、飞行器机翼冻结、机上火灾和其他已知类型的飞行危机。
[0222]
1020.3——识别并储存典型环境条件的各种数学分布,以便这些分布可用作模拟
的一部分。
[0223]
在图10的流程图中未示出,该系统和方法还可以分别识别出发和到达机场的沿着出发路径或接近路径的各种模拟点,以便使用这些指定点作为从这些点模拟潜在着陆的基础。
[0224]
在一个实施例中,其严格地是示例性的且不是限制性的,步骤1020可识别沿计划飞行路径的点,这些点距预定起飞/着陆位置一(1)英里,距预定起飞/着陆位置二(2)英里,距预定起飞/着陆位置三(3)英里,以及,及距飞行起点或预定着陆位置五(5)英里、七(7)英里、十(10)英里,十五(15)英里,二十(20)英里、和三十(30)英里。这些地点将是假设的事故区域560,用作模拟在这些地点发生的飞行紧急情况的紧急着陆的基础。也可以设想其他距离。
[0225]
根据上文已经描述的各种系统和方法,步骤1030、1040、1050以及1060以与可以在飞行器100上进行的方式基本类似的方式(对于实时紧急时间,在飞行模拟中)进行模拟计算。下述指出在一些实施例中可能出现的一些差异。
[0226]
在步骤1030中,该方法识别落入各个所选紧急事件位置560的可实现着陆周界900内的潜在紧急着陆机场555。
[0227]
在步骤1040中,该方法识别示例性飞行器飞行路径模型。由于正在进行预模拟,因此可以有更多的时间进行计算,也可以有更强大的计算机。因此,所采用的飞行器飞行模型504.2可以比可用于飞行中实时紧急时间模拟的简化模型更详细或更解析地完成。
[0228]
在步骤1050和1060中,该方法可以考虑各种行动延迟时间来计算多个模拟场景,如在本文中的上文其他地方已经描述的。
[0229]
在步骤1070中,该方法可以基于多个模拟场景确定机场可达性392,同时考虑各种行动延迟时间,如上文在本文中别处已经描述的。
[0230]
预先计算的飞行紧急情况:如上所述,在实际低高度飞行紧急情况的情况下,本系统和方法仍可采用上述示例性方法390、400、600、700和800中的一些、大部分或全部步骤;但是在各种实施例中,可以取消这些方法的一些步骤和/或添加其他方法步骤。
[0231]
具体地,在实际飞行紧急情况时,本系统和方法可以首先识别当前紧急情况(例如,在上述方法400的步骤400.1和方法600的步骤610中);以及在机载预先计算的数据库中搜索具有最接近或最相似条件(由事件位置、事件类型、当前环境因素和类似考虑因素确定)的模拟记录。在一个实施例中,本系统和方法可以采用选择单个或仅少数最近拟合的预模拟作为向飞行员推荐目的地机场的基础。
[0232]
在可选实施例中,本系统和方法可以采用最近拟合模拟来缩小、限制或约束用于实时紧急时间着陆模拟的模拟选项/参数,但是仍然进行机载模拟。
[0233]
曲线模拟飞行路径
[0234]
在上述讨论的本系统和方法的一些示例性实施例中,通过用线性段近似飞行路径的计算获得潜在紧急飞行着陆路径500的模拟。使用线性段可以简化计算,并因此使得能够模拟更多的飞行路径570。然而,线性近似可能以精确度为代价。
[0235]
本系统和方法的可选实施例可以采用包括弯曲或部分弯曲的飞行路径的飞行路径模拟方程。现参考图11,本系统的一些实施例可以采用将飞行路径或飞行路径段表示为曲线的模拟方程,但是其中曲率方程是固定半径r的简易圆或圆弧的曲率方程式。两个示例
性模拟1100.1和1100.2在图11中示出。
[0236]
在模拟中,发生了飞行事件560,并且从飞行事故560的位置或附近开始创建模拟的飞行路径。在一个实施例中,本系统和方法确定最小飞行曲率半径r 1102。最小半径r 1102基于多个因素确定,包括飞行器r的固有飞行能力、考虑到当前飞行器条件对飞行能力的限制,以及本地天气/环境条件。
[0237]
考虑最小半径r 1102,本系统和方法可以计算弯曲飞行路径或固定弯曲半径r的飞行路径。例如,第一弯曲路径580.(c).1可以基于飞行器向右倾斜来制定,同时,第二弯曲路径580.(c).2可以基于飞行器向左倾斜来制定。(弯曲路径段580.(c)也可称为“转向段”580.(c).)
[0238]
模拟飞行路径580.1、580.2可各自沿恒定曲率继续进行,直到模拟飞行路径到达路径拐点1125。路径转折点1125由示例性方法确定为如果飞行器要过渡到直线轨迹580.[s]的点,该飞行路径将被引导朝向附近的机场555。在该点处,模拟以从飞行拐点580.[s]到候选机场的线性段来完成飞行路径580。在所示的示例性实施例中,计算两个模拟飞行路径580.1和580.2;每一个引导朝向各自的候选机场555.1和555.2;并且每个由各自的路径段580.(c).1/580.[s].1和580.(c).2/580.[s].2组成。
[0239]
风速:上述刚描述的路径模拟方法,具有转向段580.(c)和直线段580.[s],可以基于最小或零风速假设来计算。在本系统和方法的实施例中,路径模拟计算可考虑当前风速和风向。在一个实施例中,可以经由迭代方法到达模拟飞行路径。示例性迭代方法不是限制性的,例如可以包括:
[0240]
步骤1:根据上述刚描述的基本计算,忽略风因素,计算初步着陆路径580。
[0241]
步骤2:根据初步着陆路径计算到达目的地机场555的时间。
[0242]
步骤3:施加风效应来计算实际的终点位置(可能不在期望的跑道,甚至不在期望的机场)。
[0243]
步骤4:对目标位置机场555施加合适的偏移,重复步骤1至3,直到模拟的终点位置(机场/跑道)555基本上与期望的目标位置555相同。
[0244]
到达时的高度:在本系统和方法的实施例中,飞行器100在到达候选目标机场555时的高度的计算考虑了模拟飞行路径的弯曲段580.(c)和直线段580.[s]之间的差异。
[0245]
用于沿模拟着陆路径580模拟高度的计算的输入可以包括,例如但不限于:飞行器推力、牵引(draft)、重量、最大倾斜角度、当前高度以及机场高度。当考虑风速和风向时,该过程可能需要包含为转向段580.(c)和直线段580.[s]计算单独的飞行时间。这是因为阻力损失(drag penalty)导致转向段580.(c)与直线段580.[s]相比具有不同爬升速率或下降速率。这种差异造成平面沿每种类型的段(转向段vs直线段)下降的距离的差异,因此,在示例性实施例中,总下降可以计算为:
[0246]
(f3):总下降=沿直线段的时间*直线段下降速率
[0247]
沿曲线段时间*曲线段下降率
[0248]
根据上述已经讨论过的每个方法,模拟方法可以基于与模拟的总下降距离相比的剩余高度来确定飞行器是否能够到达机场。(可以考虑其他因素,诸如燃料燃烧,以确定飞行器100是否能够到达机场。)
[0249]
潜在着陆点选择标准的可延长性/可扩展性
[0250]
在本文其他地方讨论的实施例中,本系统和方法可以将一个或多个机场识别为潜在的紧急着陆点;基于对任何潜在的、附近机场尝试着陆的安全性评估,进一步确定这些机场的优先顺序。在一些实施例中,安全性评估,包括潜在着陆路径580的模拟,可以由如上所述的着陆选项评估模块305进行。
[0251]
在本系统和方法的一些实施例中,着陆选项评估模块305可以被配置成包括用于选择或评估潜在着陆点的附加或可选标准。根据公知的一般惯例、法律、飞行条例以及一般道德商业惯例,本系统和方法的实施例一般首先将飞行安全考虑和/或权重为最高优先级——并且如果飞行器100处于即时风险,则在一些实施例中,飞行器100和机上人员的安全可以是唯一的考虑。然而,如果飞行不是面临即时风险,则在评估潜在紧急着陆点时可能包括其他因素和标准。
[0252]
在一个非限制性示例性实施例中,本系统和方法可以在飞行期间出现医疗紧急情况的情况下提供紧急着陆选项。如果飞行器100本身不处于风险中且其操作没有受到损害,则本系统和方法可提出潜在着陆点555在着陆的可用的性方面(这可能需要评估模拟飞行路径580,如本文其他部分所述);以及在各种潜在着陆点555或附近是否提供医疗帮助。
[0253]
图12是根据本系统和方法的示例性着陆选项评估模块(load)305’的框图。load305’的大多数元件与本文其他地方已经讨论过的load305的元件是相同或基本相似的(参见图3和相关的讨论,以及整个申请中的其他附图),并且这里将不再重复对这些元件进行讨论。
[0254]
load 305'配置为可更新概念数据库1245的非易失性储存。本系统和方法的用户界面(可能是驾驶舱显示器260,或者行政级系统用户界面)被配置成使得航空公司人员可以向数据库添加一个或多个概念,以及相关需求或数据参数的列表。仅在一个非限制性示例中,添加的概念可以是“医疗紧急情况”,对于“医疗紧急情况”,所需的数据参数可以是“医院”、“医院位置”和类似的参数。
[0255]
对于每个概念,可以更新概念数据库1245以包括具有其自身的参数的附属(subsidiary)概念。概念数据库1245还可以允许添加和储存代码、代码片段、优先级参数、特定于不同类型的概念的数据库查询语言以及定义以下任一项或两项所必需的其他元素:(i)除飞行路径标准或机场可达性之外的可选/补充着陆选择/着陆优先标准;和(ii)与给定可选/补充标准相关的适当数据库查询。
[0256]
load 305’还可以包括评估代码生成器1250。评估代码生成器1250被配置成允许load305'在本地动态地生成能够评估着陆标准的计算机代码,着陆标准根据可以由航空公司添加到概念数据库1245的概念(或概念组)。评估代码生成器1250的操作细节超出了本文的范围。
[0257]
在一个可选实施例中,本系统和方法可以不基于概念的输入生成代码。相反,本系统和方法可以被配置成逻辑地链接由航空公司或第三方程序员完全预编码的目标代码模块(图中未示出)。一个或多个这样的目标代码模块可以被配置成根据各种标准实现实时优先级分析;这种在代码模块中的链接可以因此补充本文中在其他地方讨论的飞行路径分析/着陆安全标准。
[0258]
在本系统和方法的一个实施例中,概念数据库1245和/或代码生成器1250可以是包含在上文已经讨论的语义虚拟数据层(svdl)310中的元件。在本系统和方法的实施例中,
概念数据库1245和/或代码生成器1250(或单独的、链接的代码模块)可以实时地访问飞行器外本地数据服务1240(例如,在基于附近医疗资源识别潜在着陆点的情况下的医疗设施数据库)。在本系统和方法的一些实施例中,svdl 310可以(通过概念数据库1245和相关联的着陆评估算法)调解对本地数据库1240的访问。
[0259]
示例性应用:以上讨论的是概念数据库1245和代码生成器1250的示例性应用,用于实现用于飞行中医疗紧急情况的紧急着陆标准。在另一个示例性应用中,航空公司“galaxy air”可能决策实施一项新的政策,该政策关于在出现偏差后对副飞行员的机组加班津贴。以概念数据库系统1245作为当前系统和方法的元件,galaxy air可以(根据新策略)改变偏差之后的最大移位时间,作为可以储存(并由galaxy air更新)在概念数据库中的参数。
[0260]
通过这样的延长,本系统和方法可能能够处理询问,诸如:“我们能在可选机场xyz着陆和加油后完成我们的飞行吗?”在一个实施例中,这样的询问可以由galaxy air作为概念数据库的一部分添加到系统;在一个可选实施例中,可在紧急情况期间实时呈现询问,例如由飞行器飞行员向系统呈现语音询问。(这种飞行员发起的询问可能是现实的,例如,如果预定目的地abc的天气恶劣并且暂时不允许在abc安全着陆。)
[0261]
在一个实施例中,当呈现这样的询问时,load 305’可以将该问题映射到偏差完成概念(deviation completion concept),该偏差完成概念列出所有机组人员和机舱人员的最大允许工作时间等要考虑的问题。然后,该子概念将自动创建对各种数据库1240的数据查询(一个数据库具有关于机上机组人员和机舱成员的数据,另一个数据库具有每个工作人员的时间表,以及第三个数据库持有不同角色的工作人员的最大飞行时间规则)。然后,load 305'将计算并比较副飞行员在偏离xyz机场之后允许的最大飞行时间和她的实际飞行时间;加油;然后完成飞往最终目的地abc的飞行。
[0262]
结论
[0263]
本公开部分地涉及在飞行紧急情况迫使飞行器意外低水平着陆的情况下采用计算系统来快速识别潜在着陆点的系统和方法。本公开进一步涉及在实时紧急时刻识别在各种潜在紧急着陆点成功着陆的概率。以上呈现的,在各种实施例中,是涉及实现这些目标的示例性系统和方法。
[0264]
在所附权利要求的范围内,不同实施例的元件可以在本文未具体列举的各种实施例中组合,并且在一些情况下,可以省略一些元件。本领域技术人员可特别根据前述教导做出仍将被本公开所涵盖的可选实施例、示例和修改。此外,应当理解,用于描述本公开的术语意在具有描述词的性质而不是限制性的。
[0265]
本领域技术人员还将理解的是,在不脱离本公开的范围和精神的情况下,可以配置上述优选和可选实施例的各种改型和修改。因此,应当理解的是,在所附权利要求的范围内,本公开可以不同于本文具体描述的方式来实践。
[0266]
本发明的进一步方面通过以下条项的主题提供:
[0267]
1.一种储存指令的计算机可读、非瞬时性存储介质,指令当在飞行紧急情况期间由飞行器的数字控制器执行时,使得数字控制器执行一种方法,方法包括:从飞行器的传感器接收已经发生飞行紧急情况的指示;识别适用于飞行器的紧急着陆的潜在着陆点;对于潜在着陆点,计算飞行器从飞行器的当前位置行进到潜在着陆点的模拟飞行路径;以及对
于潜在着陆点,为模拟飞行路径识别飞行器在潜在着陆点实现安全着陆的概率。
[0268]
2.根据任何前条项的计算机可读、非瞬时性存储介质,方法进一步包括:经由驾驶舱通信系统呈现潜在着陆点和概率。
[0269]
3.根据任何前条项的计算机可读、非瞬时性存储介质,方法进一步包括:对于潜在着陆点,周期性地更新模拟飞行路径的计算,用于飞行器从飞行器的更新的当前位置行进到潜在着陆点;以及对于潜在着陆点,周期性地为模拟飞行路径更新飞行器在相应潜在着陆点实现安全着陆的概率。
[0270]
4.根据任何前条项的计算机可读、非瞬时性存储介质,方法进一步包括:为飞行器的紧急着陆识别多个潜在着陆点;对于多个潜在着陆点中的每个相应潜在着陆点,模拟飞行器从飞行器的当前位置行进到相应潜在着陆点的相应模拟飞行路径;以及对于每个相应潜在着陆点,为相应模拟飞行路径识别飞行器在相应潜在着陆点实现安全着陆的相应概率。
[0271]
5.根据任何前条项的计算机可读、非瞬时性存储介质,识别适用于飞行器的紧急着陆的潜在着陆点的步骤包括:从飞行器的当前位置确定合理可实现着陆周界(palp);以及在合理可实现着陆周界内识别一个或多个机场作为潜在着陆点。
[0272]
6.根据任何前条项的计算机可读、非瞬时性存储介质,计算飞行器的模拟飞行路径的步骤包括:根据简化飞行路径模拟模型计算飞行路径,简化飞行路径模拟模型被配置成在最多10秒的时间跨度内,计算到多个替代目的地机场的多个替代飞行路径。
[0273]
7.根据任何前条项的计算机可读、非瞬时性存储介质,计算飞行器的模拟飞行路径的步骤包括:根据简化飞行路径模拟模型计算飞行路径,简化飞行路径模拟模型基于以下至少一项:固定的当前飞行器推力;固定的当前风速;固定的当前风向;以及基于线性路径段构建的模拟飞行路径。
[0274]
8.根据任何前条项的计算机可读、非瞬时性存储介质,识别飞行器在相应潜在着陆点实现安全着陆的概率的步骤包括:对于所选机场,为多个不同的环境条件或飞行器条件生成多个飞行场景;对于所选机场,为相应多个飞行场景生成多个不同的着陆飞行路径模拟;对于多个飞行路径模拟中的每个飞行路径模拟,确定飞行路径相对于在目的地机场的安全着陆是否是可行的;以及基于针对多个着陆飞行路径模拟的可行性的确定,生成在机场安全着陆的概率。
[0275]
9.根据任何前条项的计算机可读、非瞬时性存储介质,方法进一步包括在任何紧急情况之前预先计算用于紧急着陆的至少一个模拟飞行路径。
[0276]
10.一种方法,方法包括:在飞行器上的数字计算系统中,接收已经发生飞行紧急情况的指示;经由数字计算系统的处理器识别适合飞行器紧急着陆的潜在着陆点,潜在着陆点选自储存在数字计算系统的存储器中的着陆点的列表;对于潜在着陆点,经由处理器计算飞行器从飞行器的当前位置行进到潜在着陆点的模拟飞行路径;以及对于潜在着陆点,经由处理器为模拟飞行路径识别飞行器在相应潜在着陆点实现安全着陆的概率。
[0277]
11.根据任何前条项的方法,进一步包括:经由飞行器的驾驶舱通信系统呈现潜在着陆点和概率。
[0278]
12.根据任何前条项的方法,进一步包括:对于潜在着陆点,周期性地更新模拟飞行路径的计算,用于飞行器从飞行器的更新的当前位置行进到潜在着陆点;以及对于潜在
着陆点,周期性地为模拟飞行路径更新飞行器在相应潜在着陆点实现安全着陆的概率。
[0279]
13.根据任何前条项的方法,方法进一步包括:为飞行器的紧急着陆识别多个潜在着陆点;对于多个潜在着陆点中的每个相应潜在着陆点,模拟飞行器从飞行器的当前位置行进到相应潜在着陆点的相应模拟飞行路径;以及对于每个相应潜在着陆点,为相应模拟飞行路径识别飞行器在相应潜在着陆点实现安全着陆的相应概率。
[0280]
14.根据任何前条项的方法,识别适用于飞行器的紧急着陆的潜在着陆点的步骤包括:从飞行器的当前位置确定合理可实现着陆周界(palp);以及在合理可实现着陆周界内识别一个或多个机场作为潜在着陆点。
[0281]
15.根据任何前条项的方法,计算飞行器的模拟飞行路径的步骤包括:根据简化飞行路径模拟模型计算飞行路径,简化飞行路径模拟模型被配置成在最多1分钟的时间跨度内,计算到多个替代目的地机场的多个替代飞行路径。
[0282]
16.根据任何前条项的方法,计算飞行器的模拟飞行路径的步骤包括:根据简化飞行路径模拟模型计算飞行路径,简化飞行路径模拟模型基于以下至少一项:固定的当前飞行器推力;固定的当前风速;固定的当前风向;以及基于线性路径段构建的模拟飞行路径。
[0283]
17.根据任何前条项的方法,识别飞行器在相应潜在着陆点实现安全着陆的概率的步骤包括:对于所选机场,为多个不同的环境条件或飞行器条件生成多个飞行场景;对于所选机场,为相应多个飞行场景生成多个不同的着陆飞行路径模拟;对于多个飞行路径模拟中的每个飞行路径模拟,确定飞行路径相对于在目的地机场的安全着陆是否是可行的;以及基于针对多个着陆飞行路径模拟的可行性的确定,生成在机场的安全着陆的概率。
[0284]
18.根据任何前条项的方法,方法进一步包括在任何紧急情况之前预先计算用于紧急着陆的至少一个模拟飞行路径。
[0285]
19.一种在飞行器中使用的控制器,控制器包括硬件处理器,硬件处理器被配置为:从飞行器传感器接收已经发生飞行紧急情况的指示;为飞行器的紧急着陆识别多个潜在着陆点;对于多个潜在着陆点中的每个相应潜在着陆点,模拟飞行器从飞行器的当前位置行进到相应潜在着陆点的多个点特定的模拟飞行路径;和对于每个潜在着陆点,从多个点特定的模拟飞行路径中识别飞行器在每个相应潜在着陆点实现安全着陆的概率。
[0286]
20.根据任何前条项的控制器,硬件处理器进一步被配置成:经由驾驶舱通信系统,呈现每个潜在着陆点和概率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。