动态环境下基于ais数据的多目标船舶航路规划方法
技术领域
1.本发明属于船舶航路规划领域,尤其涉及一种动态环境下基于ais数据的多目标船舶航路规划方法。
背景技术:
2.ais(船舶自动识别系统)是一种应用于船和岸、船和船之间的海事安全与通信的新型助航系统,可以每隔一段时间向岸基或卫星发送船舶的ais数据,ais数据包括多种信息类型,如静态信息、动态信息等。静态信息包括船名、船舶类型等,动态信息包括船舶位置、航向、航速等。
3.当船舶靠离码头、通过船闸或经过限定水域时需要引航员的指引,因此就需使用拖轮运送引航员到达指定目标船,当目标船行驶到不需引导员指引的海域,就需使用拖轮接回引航员。在拖轮运送引航员的过程中,目标船仍处于行驶状态。多数情况下,在同一时间段需要引航员的船只较多。因此在拖轮运送引航员送达多目标船之前需结合目标船的航向、航速,规划出一条用时最短的路径用于运送引航员。
4.目前,现有船舶航路规划方法不能很好地解决上述问题,如cn109933067a 所述的一种基于遗传算法和粒子群算法的无人艇避碰方法,虽然分别针对静态障碍物和动态障碍物进行规避路径规划,但是其目标位置是固定不变的;再如 cn111538332b所述的一种无人船自动航迹规划方法,通过ais接收器获取行驶船舶的距离和航向,进行避碰路径规划,同样其目标位置是保持不变的;又如向哲等发表在《中国安全生产科学技术》(2016年第10期)上的论文“一种利用海量ais数据规划安全航线的方法”根据海量ais数据采用a*算法规划船舶航线,但是其航线规划方法并未考虑目标位置随时变化的情况。因此,在动态环境下,考虑使用ais数据进行多目标船进行航路规划,是目前船舶航路规划需要解决的问题。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种动态环境下基于ais数据的多目标船舶航路规划方法。
6.为解决上述技术问题,本发明所采用的技术方案为:一种动态环境下基于 ais数据的多目标船舶航路规划方法,具体步骤如下:
7.步骤1、获取目标船ais数据
8.拖轮通过其自带的ais系统与附近所需引导的目标船进行通信,获取目标船的ais数据并统计目标船的数量n(n≥2),ais数据包含目标船的当前位置、航向以及航速;ais数据如下:n艘目标船的当前位置为经纬度坐标,记为g1 (lon1,lat1),g2(lon2,lat2),......,gn(lonn,latn);n艘目标船的航向为真航向,记为α1,α2,......,αn;n艘目标船的航速记为v1,v2,.......,vn;
9.步骤2、建立坐标系
10.以拖轮的初始位置为原点o,以平行于真子午线且过原点o的直线为y 轴,以垂直
于真子午线且过原点o的直线为x轴,建立直角坐标系,在直角坐标系xoy内取两点a1和a2,点a1和a2的坐标信息为已知,即点a1和 a2的直角坐标为a1(x1,y1),a2(x2,y2);点a1和a2的经纬度坐标为a1
’ꢀ
(lon1
′
,lat1
′
),a2’(lon2
′
,lat2
′
);
11.步骤3、坐标转换
12.以点a1为起点,a2和gi(1≤i≤n)为终点,形成两条向量a12和 a1i,向量a12的直角坐标为(dx1,dy1),经纬度坐标为(dlon1,dlat1);向量a1i的直角坐标为(dxi,dyi),经纬度坐标为(dloni,dlati);其中, dx1=x
2-x1,dy1=y
2-y1;dlon1=lon2
′‑
lon1
′
,dlat1=lat2
′‑
lat1
′
; dxi=x
i-x1,dyi=y
i-y1;dloni=loni
′‑
lon1
′
,dlati=lati
′‑
lat1
′
;xi和yi为第i艘目标船在直角坐标系xoy内的坐标;
13.向量a12和a1i在直角坐标系和经纬度坐标系下的模记为k1,k2,k3,k4;则向量a12和a1i在直角坐标系和经纬度坐标系下的模记为k1,k2,k3,k4;则
14.根据两向量在不同坐标系中的长度比相同以及两向量在不同坐标系中的夹角不变的原则,可得向量a12和a1i的直角坐标和经纬度坐标满足以下关系:
[0015][0016]
根据上式,可求得第i艘目标船在直角坐标系xoy内的坐标xi和yi;
[0017]
步骤4、目标船所处海域划分
[0018]
根据所有目标船的初始直角坐标gi
′
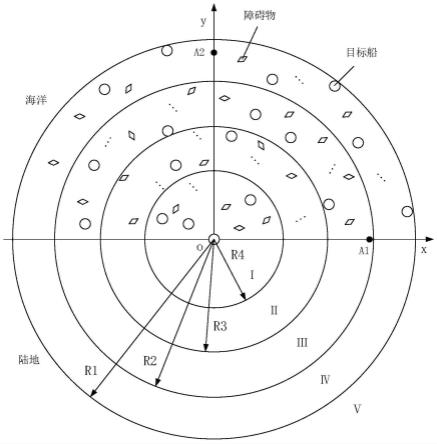
(xi,yi),以拖轮的初始位置坐标为原点,形成一个包含所有目标船只的圆,其半径为r1,并把半径r1四等分再确定3个圆,其半径分别为r2,r3,r4(r4<r3<r2<r1),把所有目标船所处海域划分成5块区域,分别为i区、ii区、iii区、iv区以及v区;
[0019]
步骤5、各海域船只分类
[0020]
计算所有目标船距离拖轮初始位置的距离li:
[0021]
比较li与r1,r2,r3,r4之间的关系,对目标船进行分类:
[0022]
若li<r4,则该目标船属于i区;
[0023]
若r4<li<r3,则该目标船属于ii区;
[0024]
若r3<li<r2,则该目标船属于iii区;
[0025]
若r2<li<r1,则该目标船属于iv区;
[0026]
并统计各区域内的船只数量为nj(j=i~iv),满足并对分区完成的目标船进行重新编号为g
jm
(0<m<nj);
[0027]
步骤6、拖轮航路初步规划
[0028]
j(j=i~iv)区针对多目标船的拖轮的航路规划如下:
[0029]
6.1、以拖轮所在位置on(x
n
,yn)(0≤n≤n-1)(点on坐标为已知)为起点,平行于y轴建立轴y’,并在轴y’上一定距离z处取点an(xn,y
′n) (y
′n=yn z);
[0030]
6.2、以点on为起点,an和g
jm
为终点,形成两条向量oan和og
jm
,向量oan的直角坐标为(0,z);向量og
jm
的直角坐标为(x
jm-xn,y
jm-yn);x
jm
和 y
jm
为目标船g
jm
在直角坐标系xoy内的坐标;
[0031]
6.3、计算向量og
jm
的模s
jm
,公式如下:
[0032][0033]
6.4、计算两条向量oan和og
jm
的夹角θ
jm
,公式如下:
[0034][0035]
6.5、设拖轮沿β
jm
方向,以速度v行驶,行驶时间为t,在b点与目标船g
jm
相遇;其中β
jm
是拖轮行驶方向与向量og
jm
之间的夹角;速度v为已知,且满足v≥{v1,v2,......,vn}
max
;
[0036]
6.6、计算拖轮和目标船g
jm
的行驶距离h
jm
和f
jm
,公式如下:
[0037]hjm
=v*t
jm
[0038]fjm
=v
jm
*t
jm
[0039]
6.7、对目标船g
jm
的行驶航向α
jm
进行判断:若0
°
<α
jm
<180
°
,执行步骤6.8;若180
°
<α
jm
<360
°
,执行步骤6.9;若α
jm
=0
°
或360
°
,执行步骤 6.10;若α
jm
=180
°
,执行步骤6.11;
[0040]
6.8、角度β
jn
满足以下方程:
[0041]
其中γ
jm
=α
jm-(θ
jm
β
jm
),0
°
<β
jm
<α
jm-θ
jm
;
[0042]
化简得:
[0043]
在0
°
<β
jm
<α
jm-θ
jm
条件下,求得t
jm
的最小值,即可获得最优路径;
[0044]
6.9、角度β
jm
满足以下方程:
[0045]
其中,γ
jm
=180
°‑
δ
jm-β
jm
,δ
jm
=180
°‑
ε
jm-θ
jm
,其中ε
jm
=360
°‑
α
jm
,故γ
jm
=360
°
θ
jm-α
jm-β
jm
, 0
°
<β
jm
<360
°‑
α
jm
θ
jm
;
[0046]
化简得:
[0047][0048]
在0
°
<β
jm
<360
°‑
α
jm
θ
jm
条件下,求得t
jm
的最小值,即可获得最优路径;
[0049]
6.10、角度β
jm
满足以下方程:
[0050]
其中,γ
jm
=180
°‑
δ
jm-β
jm
,δ
jm
=180
°‑
θ
jm
,故γ
jm
=θ
jm-β
jm
, 0
°
<β
jm
<θ
jm
;
[0051]
化简得:
[0052][0053]
在0
°
<β
jm
<θ
jm
条件下,求得t
jm
的最小值,即可获得最优路径;
[0054]
6.11、角度β
jm
满足以下方程:
[0055]
其中,γ
jm
=180
°‑
δ
jm-β
jm
,δ
jm
=θ
jm
,故γ
jm
=180
°‑
θ
jm-β
jm
, 0
°
<β
jm
<180
°‑
θ
jm
;
[0056]
化简得:
[0057]
在0
°
<β
jm
<180
°‑
θ
jm
条件下,求得t
jm
的最小值,即可获得最优路径;
[0058]
6.12、对目标船的数量进行减一处理:n
←
n-1;
[0059]
步骤7、计算剩余n艘目标船的当前位置
[0060]
在确定拖轮从当前位置运动至目标船g
jm
的最短路径所需时间t
jm
后,剩余 n艘目标船g
jn
(0<n<n)从初始位置g
jn
(x
jn
,y
jn
)(位置g
jn
为已知)运行至当前位置g
′
jn
(x
′
jn
,y
′
jn
),当前位置坐标计算如下:
[0061]
7.1、对目标船g
jn
的航速v
jn
进行分解,得到:
[0062]
其中,v
jnx
、v
jny
分别为航速v
jn
沿水平和竖直方向的分量;
[0063]
7.2、t
jm
时刻后,目标船g
jn
的行驶距离如下:
[0064][0065]
其中,s
jnx
、s
jny
分别为目标船g
jn
沿水平和竖直方向在t
jm
内的运动距离;
[0066]
7.3、对剩余n艘目标船g
jn
的行驶航向α
jn
进行判断:若0
°
≤α
jn
<90
°
,执行步骤7.4;若90
°
≤α
jn
<180
°
,执行步骤7.5;若180
°
≤α
jn
<270
°
,执行步骤7.6;若270
°
≤α
jn
≤360
°
,执行步骤7.7;
[0067]
7.4、角度τ
jn
满足τ
jn
=α
jn
,则目标船g
jn
当前位置坐标g
′
jn
(x
′
jn
,y
′
jn
),其中
[0068]
7.5、角度τ
jn
满足τ
jn
=180
°‑
α
jn
,则目标船g
jn
当前位置坐标g
′
jn
(x
′
jn
,y
′
jn
),其中
[0069]
7.6、角度τ
jn
满足τ
jn
=α
jn-180
°
,则目标船g
jn
当前位置坐标g
′
jn
(x
′
jn
,y
′
jn
),其中
[0070]
7.7、角度τ
jn
满足τ
jn
=360
°‑
α
jn
,则目标船g
jn
当前位置坐标g
′
jn
(x
′
jn
,y
′
jn
),其中
[0071]
步骤8、目标船所处海域判断更新
[0072]
计算剩余n艘目标船g
jn
距离拖轮初始位置的距离li:
[0073]
比较l
′i与r1,r2,r3,r4之间的关系,对原先各区域目标船的分类进行更新迭代:
[0074]
若l
′i<rj,则该目标船属于i区;
[0075]
若r4<l
′i<r3,则该目标船属于ii区;
[0076]
若r3<l
′i<r2,则该目标船属于iii区;
[0077]
若r2<l
′i<r1,则该目标船属于iv区;
[0078]
若l
′i>r4,则该目标船属于v区;
[0079]
更新各区域内现有船只的数量为ns(s=i~v),满足
[0080]
步骤9、路径规划判断
[0081]
对剩余目标船数量n进行判断:若n≠0,则对下一艘目标船g
jm 1
进行路径规划,转至步骤6;若n=0,则执行步骤10;
[0082]
步骤10、智能避障规划:对目标船的初步路径进行避障处理。
[0083]
作为一种优选的方案,所述步骤10的智能避障规划具体过程如下:
[0084]
10.1、建立栅格地图:依据拖轮的最初起始位置和所有目标船的最终位置,对其所在区域建立栅格地图,栅格地图的范围覆盖起始位置和最终位置;栅格的宽度设置为船身长度的2-15倍;
[0085]
10.2、栅格地图中的不可航行区标注:首先,通过电子海图同步提供礁石、禁航区的坐标、尺寸等信息,占据栅格地图中的位置;然后,确定目标船初步路径附近的礁石和禁航区;接着,通过一次膨胀化将障碍物规则化,并在一次膨胀化基础上进行二次膨胀化,预留出安全距离;最终,实现栅格地图中的不可航行区标注;
[0086]
10.3、利用智能避障算法规划不可航行区附近路径:在建立了带有障碍物标记的栅格地图后,执行智能避障算法。
[0087]
作为一种优选的方案,所述智能避障算法为a*算法。
[0088]
本发明的有益效果是:
[0089]
本发明的基于ais数据的多目标船舶航路规划方法通过接收目标船的ais 数据获
取目标船的信息,获取信息的方式简单快速,提高了获取信息的准确率,从而提高了航路规划的准确性,降低了事故发生的概率。在对多目标船所在区域进行划分时,遵循由近至远的原则并以所有目标船为目的地,对拖轮进行路径规划。在路径规划期间,考虑所有目标船的位置变化,该路径规划方法简单快速。在拖轮航路初步规划完成后,采用智能避障算法对航路进行避障处理,确定拖轮的最终最短航行路径,不仅降低了拖轮的燃油消耗,提高了拖轮的作业效率,还为拖轮作业提供了安全的保障。
附图说明
[0090]
图1为本发明的多目标船所在海域示意图
[0091]
图2为本发明的目标船航路规划流程图
[0092]
图3为本发明的目标船航向为0
°
至180
°
示意图
[0093]
图4为本发明的目标船航向为180
°
至360
°
示意图
[0094]
图5为本发明的目标船航向为0
°
或360
°
示意图
[0095]
图6为本发明的目标船航向为180
°
示意图
[0096]
图7为本发明的目标船航向在0
°
至90
°
航速分解示意图
[0097]
图8为本发明的目标船航向在90
°
至180
°
航速分解示意图
[0098]
图9为本发明的目标船航向在180
°
至270
°
航速分解示意图
[0099]
图10为本发明的目标船航向在270
°
至360
°
航速分解示意图
具体实施方式
[0100]
下面结合附图,详细描述本发明的具体实施方案。
[0101]
如图1至图10所示,本发明的动态环境下基于ais数据的多目标船舶航路规划方法如下:
[0102]
步骤1、获取目标船ais数据
[0103]
拖轮通过其自带的ais系统与附近所需引导员的目标船进行通信,获取目标船的ais数据并统计目标船的数量n(n≥2),ais数据包含目标船的当前位置、航向以及航速等。ais数据如下:n艘目标船的当前位置为经纬度坐标,记为g1(lon1,lat1),g2(lon2,lat2),......,gn(lonn,latn);n艘目标船的航向为真航向,记为α1,α2,......,αn;n艘目标船的航速记为v1, v2,......,vn;
[0104]
步骤2、建立坐标系
[0105]
以拖轮的初始位置为原点o,以平行于真子午线且过原点o的直线为y 轴,以垂直于真子午线且过原点o的直线为x轴,建立直角坐标系,在直角坐标系xoy内取两点a1和a2,点a1和a2的坐标信息为已知,即点a1和 a2的直角坐标为a1(x1,y1),a2(x2,y2);点a1和a2的经纬度坐标为a1
’ꢀ
(lon1
′
,lat1
′
),a2’(lon2
′
,lat2
′
);
[0106]
步骤3、坐标转换
[0107]
以点a1为起点,a2和gi(1≤i≤n)为终点,形成两条向量a12和 a1i,向量a12的直角坐标为(dx1,dy1),经纬度坐标为(dlon1,dlat1);向量a1i的直角坐标为(dxi,dyi),经纬度坐标为(dloni,dlati);其中, dx1=x
2-x1,dy1=y
2-y1;dlon1=lon2
′‑
lon1
′
,dlat1=lat2
′‑
lat1
′
; dxi=x
i-x1,dyi=y
i-y1;dloni=loni
′‑
lon1
′
,dlati=lati
′‑
lat1
′
;xi和yi为第i艘
目标船在直角坐标系xoy内的坐标;
[0108]
向量a12和a1i在直角坐标系和经纬度坐标系下的模记为k1,k2,k3,k4;则向量a12和a1i在直角坐标系和经纬度坐标系下的模记为k1,k2,k3,k4;则
[0109]
根据两向量在不同坐标系中的长度比相同以及两向量在不同坐标系中的夹角不变的原则,可得向量a12和ali的直角坐标和经纬度坐标满足以下关系:
[0110][0111]
根据上式,可求得第i艘目标船在直角坐标系xoy内的坐标xi和yi;
[0112]
步骤4、目标船所处海域划分
[0113]
根据所有目标船的初始直角坐标gi
′
(xi,yi),以拖轮的初始位置坐标为原点,形成一个包含所有目标船只的圆,其半径为r1,并把半径r1四等分再确定3个圆,其半径分别为r2,r3,r4(r4<r3<r2<r1),把所有目标船所处海域划分成5块区域,分别为i区、ii区、iii区、iv区以及v区;
[0114]
步骤5、各海域船只分类
[0115]
计算所有目标船距离拖轮初始位置的距离li:
[0116][0117]
比较li与r1,r2,r3,r4之间的关系,对目标船进行分类:
[0118]
若li<r4,则该目标船属于i区;
[0119]
若r4<li<r3,则该目标船属于ii区;
[0120]
若r3<li<r2,则该目标船属于iii区;
[0121]
若r2<li<r1,则该目标船属于iv区;
[0122]
并统计各区域内的船只数量为nj(j=i~iv),满足并对分区完成的目标船进行重新编号为g
jm
(0<m<nj);
[0123]
步骤6、拖轮航路初步规划
[0124]
j(j=i~iv)区针对多目标船的拖轮的航路规划如下:
[0125]
6.1、以拖轮所在位置on(x
n
,yn)(0≤n≤n-1)(点on坐标为已知)为起点,平行于y轴建立轴y’,并在轴y’上一定距离z处取点an(xn,y
′n) (y
′n=yn z);
[0126]
6.2、以点on为起点,an和g
jm
为终点,形成两条向量oan和og
jm
,向量oan的直角坐标为(0,z);向量og
jm
的直角坐标为(x
jm-xn,y
jm-yn);x
jm
和 y
jm
为目标船g
jm
在直角坐标系xoy内的坐标;
[0127]
6.3、计算向量og
jm
的模s
jm
,公式如下:
[0128][0129]
6.4、计算两条向量oan和og
jm
的夹角θ
jm
,公式如下:
[0130][0131]
6.5、设拖轮沿β
jm
方向,以速度v行驶,行驶时间为t,在b点与目标船g
jm
相遇;其中β
jm
是拖轮行驶方向与向量og
jm
之间的夹角;速度v为已知,且满足v≥{v1,v2,......,vn}
max
;
[0132]
6.6、计算拖轮和目标船g
jm
的行驶距离h
jm
和f
jm
,公式如下:
[0133]hjm
=v*t
jm
[0134]fjm
=v
jm
*t
jm
[0135]
6.7、对目标船g
jm
的行驶航向α
jm
进行判断:若0
°
<α
jm
<180
°
,执行步骤6.8;若180
°
<α
jm
<360
°
,执行步骤6.9;若α
jm
=0
°
或360
°
,执行步骤 6.10;若α
jm
=180
°
,执行步骤6.11;
[0136]
6.8、角度β
jm
满足以下方程:
[0137]
其中γ
jm
=α
jm-(θ
jm
β
jm
),0
°
<β
jm
<α
jm-θ
jm
;
[0138]
化简得:
[0139]
在0
°
<β
jm
<α
jm-θ
jm
条件下,求得t
jm
的最小值,即可获得最优路径;
[0140]
6.9、角度β
jm
满足以下方程:
[0141]
其中,γ
jm
=180
°‑
δ
jm-β
jm
,δ
jm
=180
°‑
ε
jm-θ
jm
,其中ε
jm
=360
°‑
α
jm
,故γ
jm
=360
°
θ
jm-α
jm-β
jm
, 0
°
<β
jm
<360
°‑
α
jm
θ
jm
;
[0142]
化简得:
[0143]
在0
°
<β
jm
<360
°‑
α
jm
θ
jm
条件下,求得t
jm
的最小值,即可获得最优路径;
[0144]
6.10、角度β
jm
满足以下方程:
[0145]
其中,γ
jm
=180
°‑
δ
jm-β
jm
,δ
jm
=180
°‑
θ
jm
,故γ
jm
=θ
jm-β
jm
, 0
°
<β
jm
<θ
jm
;
[0146]
化简得:
[0147]
在0
°
<β
jm
<θ
jm
条件下,求得t
jm
的最小值,即可获得最优路径;
[0148]
6.11、角度β
jm
满足以下方程:
[0149]
其中,γ
jm
=180
°‑
δ
jm-β
jm
,δ
jm
=θ
jm
,故γ
jm
=180
°‑
θ
jm-β
jm
, 0
°
<β
jm
<180
°‑
θ
jm
;
[0150]
化简得:
[0151]
在0
°
<β
jm
<180
°‑
θ
jm
条件下,求得t
jm
的最小值,即可获得最优路径;
[0152]
6.12、对目标船的数量进行减一处理:n
←
n-1
[0153]
步骤7、计算剩余n艘目标船的当前位置
[0154]
在确定拖轮从当前位置运动至目标船g
im
的最短路径所需时间t
jm
后,剩余 n艘目标船g
jn
(0<n<n)从初始位置g
jn
(x
jn
,y
jn
)(位置g
jn
为已知)运行至当前位置g
′
jn
(x
′
jn
,y
′
jn
),当前位置坐标计算如下:
[0155]
7.1、对目标船g
jn
的航速v
jn
进行分解,得到如下方程组:
[0156][0157]
其中,v
jnx
、v
jny
分别为航速v
jn
沿水平和竖直方向的分量;
[0158]
7.2、t
jn
时刻后,目标船g
jn
的行驶距离如下:
[0159]
其中,s
jnx
、s
jny
分别为目标船g
jn
沿水平和竖直方向在t
jm
内的运动距离;
[0160]
7.3、对剩余n艘目标船g
jn
的行驶航向α
jn
进行判断:若0
°
≤α
jn
<90
°
,执行步骤7.4;若90
°
≤α
jn
<180
°
,执行步骤7.5;若180
°
≤α
jn
<270
°
,执行步骤7.6;若270
°
≤α
jn
≤360
°
,执行步骤7.7;
[0161]
7.4、角度τ
jn
满足τ
jn
=α
jn
,则目标船g
jn
当前位置坐标g
′
jn
(x
′
jn
,y
′
jn
),其中
[0162]
7.5、角度τ
jn
满足τ
jn
=180
°‑
α
jn
,则目标船g
′
jn
当前位置坐标g
′
jn
(x
′
jn
,y
′
jn
),其中
[0163]
7.6、角度τ
jn
满足τ
jn
=α
jn-180
°
,则目标船g
jn
当前位置坐标g
′
jn
(x
′
jn
,y
′
jn
),其中
[0164]
7.7、角度τ
jn
满足τ
jn
=360
°‑
α
jn
,则目标船g
jn
当前位置坐标g
′
jn
(x
′
jn
,y
′
jn
),其中
[0165]
步骤8、目标船所处海域判断更新
[0166]
计算剩余n艘目标船g
jn
距离拖轮初始位置的距离li:
[0167]
比较l
′i与r1,r2,r3,r4之间的关系,对原先各区域目标船的分类进行更新迭代:
[0168]
若l
′i<rj,则该目标船属于i区;
[0169]
若r4<l
′i<r3,则该目标船属于ii区;
[0170]
若r3<l
′i<r2,则该目标船属于iii区;
[0171]
若r2<l
′i<r1,则该目标船属于iv区;
[0172]
若l
′i>r4,则该目标船属于v区;
[0173]
更新各区域内现有船只的数量为ns(s=i~v),满足
[0174]
步骤9、路径规划判断
[0175]
对剩余目标船数量n进行判断:若n≠0,则对下一艘目标船g
jm 1
进行路径规划,执行步骤6至步骤9;若n=0,则执行步骤10;
[0176]
步骤10、智能避障规划
[0177]
目标船的初步路径进行避障处理,过程如下:
[0178]
10.1、建立栅格地图。依据拖轮的最初起始位置和所有目标船的最终位置,对其所在区域建立栅格地图,栅格地图的范围覆盖起始位置和最终位置;栅格的宽度设置为船身长度的2-15倍。
[0179]
10.2、栅格地图中的不可航行区标注。首先,通过电子海图同步提供礁石、禁航区的坐标、尺寸等信息,占据栅格地图中的位置;然后,确定目标船初步路径附近的礁石和禁航区;接着,通过一次膨胀化将障碍物规则化,并在一次膨胀化基础上进行二次膨胀化,预留出安全距离。最终,实现栅格地图中的不可航行区标注。
[0180]
10.3、利用智能避障算法规划不可航行区附近路径。在建立了带有障碍物标记的栅格地图后,执行智能避障算法。智能避障算法选用a*算法,不仅计算效率高,可在定制的启发式函数引导下,实现栅格地图下的最短路径规划。
[0181]
上述的实施例仅例示性说明本发明创造的原理及其功效,以及部分运用的实施例,而非用于限制本发明;应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。