1.本发明涉及自动控制领域,尤其涉及一种生物启发式二维肢体协同控制方法及系统。
背景技术:
2.社交能力是一个人是否具备善于与他人交往的能力,是衡量一个人能否适应现代社会需求的标准之一。社交能力包括人际感受能力、人事记忆力、人际理解力、人际相像力、风度和表达力以及合作能力与协调能力。缺乏社交能力的人通常很难与他人协调和沟通,这给他们的生活带来了很大的不便。儿童缺乏社交能力则会降低自信心,使他们变得自闭,不利于身心健康发展。现阶段,主要是通过心理辅导或药物辅助的方法来诱导社交能力,这种方法存在花费成本高,药物存在副作用的问题。
3.社会心理学中的相似理论表明,人们更喜欢与具有相似形态、逻辑和行为特征的人互动,并且他们倾向于无意识地协调自己的行为。研究表明,人际协调过程与心理联系密切相关,两人之间的运动协同作用有望促进社会联系。研究人员发现,人类在与虚拟伙伴以领导-跟随模式进行移动合作实验后,会学习到合作行为:当虚拟伙伴不再引导他/她的移动时,参与者仍能很好地互动。因此,社交能力的提升可以通过两个人之间的合作和联合行动来实现,这为一种新的儿童社交能力训练方法提供了思路:通过运动协同促进儿童的社会互动。本质上,它旨在开发一种新的训练方法,设计一个虚拟伙伴与儿童互动,同时通过调整虚拟伙伴的运动相似性来保持与儿童的一定程度的协调,因此,后者可以无意识地被引导到一些所需的运动特征,以提高儿童的社交能力。该方法可以为受训练儿童生成定制的虚拟交互伙伴,方案更个性化,成本更低。
4.上述新型社交能力提升方法在现有实践中仍存在一些不足之处:虚拟人和儿童的交互是在水平两端点间的来回运动,这种一维的运动形式较为单一,不利于二者长期的交互,可能导致训练效果不明显;目前研究人员在设计控制器时,没有考虑生物启发(即人体中枢神经系统对运动的调控机制),因此可能出现交互不自然的情况。
5.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
6.为解决上述技术问题,本发明提供一种生物启发式二维肢体协同控制方法,包括:
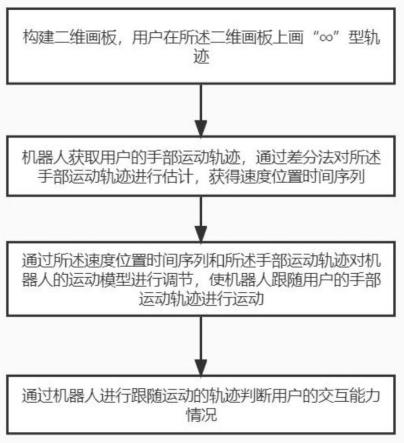
7.s1:构建二维画板,用户在所述二维画板上画“∞”型轨迹;
8.s2:机器人获取用户的手部运动轨迹,通过差分法对所述手部运动轨迹进行估计,获得速度位置时间序列;
9.s3:通过所述速度位置时间序列和所述手部运动轨迹对机器人的运动模型进行调节,使机器人跟随用户的手部运动轨迹进行运动;
10.s4:通过机器人进行跟随运动的轨迹判断用户的交互能力情况。
11.优选的,所述二维画板为二维平面坐标系,横坐标为x轴,纵坐标为y轴。
12.优选的,所述速度位置时间序列的计算公式为:
[0013][0014]
其中,t为时刻,h为采样间隔时间;x
hp
(t)为t时刻x方向上用户的当前位置,为t时刻x方向上用户的当前速度,y
hp
(t)为t时刻y方向上用户的当前位置,为t时刻y方向上用户的当前速度;x
hp
(t h)为t h时刻x方向上用户的当前位置,y
hp
(t h)为t h时刻y方向上用户的当前位置。
[0015]
优选的,步骤s3具体为:
[0016]
s31:通过所述速度位置时间序列和所述手部运动轨迹,计算获得调节运动幅度和调节频率;
[0017]
s32:设置误差阈值,计算获得用户与机器人之间的状态误差;
[0018]
s33:若所述状态误差大于或等于所述误差阈值,则机器人的运动模型按照所述调节运动幅度和所述调节频率进行一次调节,否则运动模型不变化。
[0019]
优选的,调节运动幅度和调节频率的计算公式为:
[0020][0021]
其中,t为时刻,x
vp
(t)为t时刻x方向上机器人的当前位置,为t时刻x方向上机器人的当前速度;y
vp
(t)为t时刻y方向上机器人的当前位置,为t时刻y方向上机器人的当前速度;x
hp
(t)为t时刻x方向上用户的当前位置,为t时刻x方向上用户的当前速度;y
hp
(t)为t时刻y方向上用户的当前位置,为t时刻y方向上用户的当前速度;为t时刻的调节频率,为t时刻的调节运动幅度;k1和k2为反馈增益,均为正值。
[0022]
优选的,所述状态误差大于或等于所述误差阈值的表达式为:
[0023][0024]
其中,tk是控制触发时刻,t
k 1
是下一次控制触发时刻,t0是初始时刻;s
vp
(tk)=x
vp
(tk) y
vp
(tk)是第k次控制触发时刻机器人x和y方向上的当前位置之和,s
vp
(t)=x
vp
(t) y
vp
(t)是t时刻机器人x和y方向上的理想位置之和,t∈(tk,t
k 1
];x
vp
为x方向上机器人的当前位置,y
vp
为y方向上机器人的当前位置;α和δ均为控制参数,α和δ的取值均为正数。
[0025]
优选的,所述机器人的运动模型的表达式为:
[0026][0027]
其中,t为时刻,x
vp
(t)为t时刻x方向上机器人的当前位置,y
vp
(t)为t时刻y方向上机器人的当前位置,a(t)为t时刻机器人的运动幅度,ω(t)为t时刻机器人的运动频率。
[0028]
优选的,步骤s4具体为:
[0029][0030][0031]
其中,i表示采样点的编号,n是采样点的总数;x
vp,i
是x方向上机器人第i个采样点的位置;y
vp,i
是y方向上机器人第i个采样点的位置;x
hp,i
是x方向上用户第i个采样点的位置;y
hp,i
是y方向上用户第i个采样点的位置;rmse表示机器人与用户轨迹的时间对应性;δφi是用户和机器人的运动轨迹在第i个采样点的相位差;cv衡量了用户和机器人的轨迹的运动协调水平。
[0032]
一种生物启发式二维肢体协同控制系统,包括:
[0033]
画板构建模块,用于构建二维画板,用户在所述二维画板上画“∞”型轨迹;
[0034]
速度位置时间序列获取模块,用于机器人获取用户的手部运动轨迹,通过差分法对所述手部运动轨迹进行估计,获得速度位置时间序列;
[0035]
机器人运动模块,用于通过所述速度位置时间序列和所述手部运动轨迹对机器人的运动模型进行调节,使机器人跟随用户的手部运动轨迹进行运动。
[0036]
本发明具有以下有益效果:
[0037]
通过用户和机器人在二维平面上的交互运动,能够更好的激发用户产生更丰富复杂的运动与交互形式,更有利于用户恢复正常的社交能力。
附图说明
[0038]
图1为本发明实施例方法流程图;
[0039]
图2为用户运动轨迹;
[0040]
图3为用户的速度位置时间序列;
[0041]
图4为机器人跟随运动轨迹;
[0042]
图5为rmse(时间对应性)值的统计分析结果;
[0043]
图6为cv(协调水平)值的统计分析结果;
[0044]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0045]
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0046]
参照图1,本发明针对传统的心理辅导方法中存在的花费成本高、效果差、方案不够个性化的问题,以及交互运动协同方法存在的运动形式较为单一、控制方法未考虑生物
启发的问题进行了改进,提供一种生物启发式二维肢体协同控制方法,构建二维画板,通过用户和机器人在二维平面上的交互运动,更好的激发用户产生更丰富复杂的运动与交互形式,更有利于用户恢复正常的社交能力。
[0047]
具体包括:
[0048]
s1:构建二维画板,用户在所述二维画板上画“∞”型轨迹;
[0049]
具体的,所述二维画板为二维平面坐标系,横坐标为x轴,纵坐标为y轴;参考图2,用户用手画“∞”型,要求尽可能完整,平滑;
[0050]
s2:机器人获取用户的手部运动轨迹,通过差分法对所述手部运动轨迹进行估计,获得速度位置时间序列;
[0051]
参考图3,机器人通过信号采样单元获取用户的手部运动轨迹并记录下来,通过滤波单元去除手部运动轨迹中的干扰信号;通过速度位置估计单元自主生成一系列的位置和速度信号,利用后向差分规则,只用采集少量的用户手部位置信号,就能自主推算出可用的速度信号和位置信号,而不用局限于之前采集的信号,该过程模拟了人体的视觉系统;
[0052]
所述速度位置时间序列的计算公式为:
[0053][0054]
其中,t为时刻(整个系统的运行时刻),h为采样间隔时间;x
hp
(t)为t时刻x方向上用户的当前位置,为t时刻x方向上用户的当前速度,y
hp
(t)为t时刻y方向上用户的当前位置,为t时刻y方向上用户的当前速度;x
hp
(t h)为t h时刻x方向上用户的当前位置,y
hp
(t h)为t h时刻y方向上用户的当前位置。
[0055]
s3:通过所述速度位置时间序列和所述手部运动轨迹对机器人的运动模型进行调节,使机器人跟随用户的手部运动轨迹进行运动,该过程模拟了人脑中枢神经系统和神经肌肉系统;
[0056]
参考图4,步骤s3中机器人根据当前状态(主要是位置、速度)误差调整其运动幅度和频率,以跟随用户的手部运动轨迹:
[0057]
具体为:s31:通过所述速度位置时间序列和所述手部运动轨迹,计算获得调节运动幅度和调节频率;
[0058]
调节运动幅度和调节频率的计算公式为:
[0059][0060]
其中,t为时刻,x
vp
(t)为t时刻x方向上机器人的当前位置,为t时刻x方向上机器人的当前速度;y
vp
(t)为t时刻y方向上机器人的当前位置,为t时刻y方向上机器人的当前速度;x
hp
(t)为t时刻x方向上用户的当前位置,为t时刻x方向上用户的当前
速度;y
hp
(t)为t时刻y方向上用户的当前位置,为t时刻y方向上用户的当前速度;为t时刻的调节频率,为t时刻的调节运动幅度;k1和k2为反馈增益,均为正值;
[0061]
s32:设置误差阈值,计算获得用户与机器人之间的状态误差;
[0062]
s33:若所述状态误差大于或等于所述误差阈值,则机器人的运动模型按照所述调节运动幅度和所述调节频率进行一次调节,否则运动模型不变化;
[0063]
所述状态误差大于或等于所述误差阈值的表达式为:
[0064][0065]
其中,t为时刻,tk是控制触发时刻,t
k 1
是下一次控制触发时刻,t0是初始时刻(优选的设置为0);s
vp
(tk)=x
vp
(tk) y
vp
(tk)是第k次控制触发时刻机器人x和y方向上的当前位置之和,s
vp
(t)=x
vp
(t) y
vp
(t)是t时刻机器人x和y方向上的理想位置之和,t∈(tk,t
k 1
];x
vp
为x方向上机器人的当前位置,y
vp
为y方向上机器人的当前位置;α和δ均为控制参数,α和δ的取值均为正数。
[0066]
所述机器人的运动模型的表达式为:
[0067][0068]
其中,t为时刻,x
vp
(t)为t时刻x方向上机器人的当前位置,y
vp
(t)为t时刻y方向上机器人的当前位置,a(t)为t时刻机器人的运动幅度,ω(t)为t时刻机器人的运动频率。
[0069]
s4:通过机器人进行跟随运动的轨迹判断用户的交互能力情况;
[0070]
具体为,用户在经历了与机器人长期的交互之后,会学习到感知并模仿他人行为的能力,即交互能力;为了验证这一点,本发明设计了一系列性能指标来衡量患者的恢复情况,如图5-6所示;
[0071][0072][0073]
i表示采样点的编号,n是采样点的总数;x
vp,i
是x方向上机器人第i个采样点的位置;y
vp,i
是y方向上机器人第i个采样点的位置;x
hp,i
是x方向上用户第i个采样点的位置;y
hp,i
是y方向上用户第i个采样点的位置;rmse表示机器人与用户轨迹的时间对应性(rmse值越低,代表时间对应性越好);δφi是用户和机器人的运动轨迹在第i个采样点的相位差;cv衡量了用户和机器人的轨迹的运动协调水平(cv值越高,代表运动协调水平越高)。
[0074]
本发明提供,一种生物启发式二维肢体协同控制系统,包括:
[0075]
画板构建模块,用于构建二维画板,用户在所述二维画板上画“∞”型轨迹;
[0076]
速度位置时间序列获取模块,用于机器人获取用户的手部运动轨迹,通过差分法对所述手部运动轨迹进行估计,获得速度位置时间序列;
[0077]
机器人运动模块,用于通过所述速度位置时间序列和所述手部运动轨迹对机器人的运动模型进行调节,使机器人跟随用户的手部运动轨迹进行运动。
[0078]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0079]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
[0080]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。