技术特征:
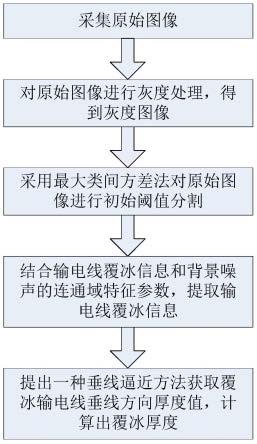
1.基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于:首先,将无人机采集到的原始输电线覆冰rgb图像转换为灰度图像;采用最大类间方差法对灰度图像进行初始分割,完成对原始图像的预处理;结合输电线覆冰信息和背景噪声的连通域特征参数,提取输电线覆冰信息;最后,提出垂线逼近方法获取覆冰输电线垂线方向厚度值,求取覆冰厚度。2.根据权利要求1所述基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于:所述预处理指的是:将无人机采集的原始输电线覆冰rgb图像进行灰度化,得到灰度图像,并用最大类间方差法对灰度图像进行初始分割,得到初始分割后的图像。3.根据权利要求1所述基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于:所述输电线覆冰信息指的是:将初始分割后的图像进一步结合输电线覆冰信息和背景噪声的连通域特征参数,分离覆冰输电线目标和背景噪声。4.根据权利要求1所述基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于:所述输电线路覆冰厚度计算方法,具体是:针对覆冰输电线图像中左侧输电线进行细化运算得到单像素宽的骨架线,然后采用canny算法检查图像中每个像素的邻域,利用邻近一阶方向导数的变化来检测该像素邻域内灰度的变化规律,如果出现灰度级的显著变化,则可推测该像素落在图像的边缘范围内;通过在骨架方向上寻找与骨架像素接近的边缘像素确定输电线覆冰边缘信息,在提取出覆冰输电线骨架线与覆冰边缘线基础上进行输电线覆冰厚度计算。5.基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于包括以下步骤:步骤1:以无人机巡检航拍的输电线路图像为依据,将原始输电线覆冰rgb图像转换为灰度图像;步骤2:采用最大类间方差法,对步骤1得到的灰度图像进行初始阈值分割;步骤3:采用基于连通域特征的覆冰输电线目标提取方法,结合输电线覆冰信息和背景噪声的连通域特征参数,进一步分离覆冰输电线目标和背景噪声;步骤4:采用垂线逼近方法获取覆冰输电线垂线方向厚度值,进而计算出覆冰厚度。6.根据权利要求5所述基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于:所述步骤1中,采用平均值法将原始输电线覆冰rgb图像转换为灰度图像,平均值法公式如式(1)所示:f(i,j)=[r(i,j) g(i,j) b(i,j)]/3
ꢀꢀꢀꢀ
(1);式中:r(i,j)、g(i,j)、b(i,j)为rgb图像像素点(i,j)的r、g、b三个分量的像素值;f(i,j)为灰度图像像素点(i,j)的像素值。7.根据权利要求5所述基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于:所述步骤2中,最大类间方差法具体如下:设f(m,n)为m
×
n图像在(m,n)点的灰度值,灰度级为k,则f(m,n)的范围是[0,k-1];设p(i)是图像中灰度值为i的频率,则有:m为该模板中包含当前像素在内的像素总个数、n是图像中像素总数、i为灰度值、f(m,n)为m
×
n图像在(m,n)点的灰度值;
当选定的阈值为灰度值t时,通过比较f(m,n)与阈值t的大小来分割目标物体和背景;在图像中目标物体与背景所占的比例分别为:w0(t)表示当m
×
n图像在(m,n)点的灰度值小于等于阈值时,在图像中目标物体与背景所占的比例、p(i)是图像中灰度值为i的频率、t为选定的阈值灰度值;w1(t)表示当m
×
n图像在(m,n)点的灰度值大于阈值时,在图像中目标物体与背景所占的比例;均值分别为:u0(t)表示当m
×
n图像在(m,n)点的灰度值小于等于阈值时的均值;u1(t)表示当m
×
n图像在(m,n)点的灰度值大于阈值时的均值;目标和背景总的均值为:u=w0(t)u0(t) w1(t)u1(t)
ꢀꢀꢀꢀ
(7);则类间方差为:e=w0(t)(u0(t)-u)2 w1(t)(u1(t)-u)2ꢀꢀꢀꢀ
(8);u表示目标和背景总的均值;当类间方差e取得最大值时的灰度值t,即为要选择的最优阈值。8.根据权利要求5所述基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于:所述步骤3中,采用基于连通域特征的覆冰输电线目标提取方法,进一步分离覆冰输电线目标和背景噪声;该方法通过分析覆冰输电线灰度图像的灰度值变化来构造连通域,统计输电线覆冰连通域和背景信息连通域的特征,分析两者的差异,设置相应的参数阈值将输电线覆冰和背景信息分割出来,获取只有覆冰输电线信息的二值化图像;观察阈值分割后的图像,得到覆冰输电线信息和背景噪声的连通域面积(p),具有明显差异,前者远大于后者,因此选取连通域面积作为覆冰输电线信息的特征参数;连通域面积公式如式(9)所示:p=∫f(x,y)dx
ꢀꢀꢀꢀ
(9);式中,f(x,y)表示连通域n内坐标(x,y)处的像素点。9.根据权利要求5所述基于无人机图像处理的输电线覆冰厚度检测方法,其特征在于:所述步骤4中,选取像素示意图中o0点相邻的上下共7个点o
i
(i=0,1,2,3)之间的连线近似作为骨架线对应的切线,由于输电线覆冰图像是m行n列的离散点矩阵,当i太大则该段直线在此区段不能近似于骨架线斜率,当i太小则像素排列形式带来的误差较大,i=3时,将该段直线作为近似骨架线切线,得到的垂线方向输电线覆冰厚度,作为骨架线上该点对应的厚度误差最小。10.根据权利要求9所述基于无人机图像处理的输电线覆冰厚度检测方法,其特征在
于:所述步骤4包括如下步骤,s4.1:利用边缘检测方法,对输电线覆冰骨架和输电线覆冰边缘进行像素定位,统计记录输电线覆冰细化、边缘提取操作后所有灰度值为0的像素点坐标;s4.2:计算骨架线上任意o点的厚度,以o点为圆心沿骨架线上两个方向寻找输电线覆冰骨架线上相距3个像素的点p1(x,y)和点p2(x,y),通过p1和p2点得到近似骨架线斜率k=(y
2-y1)/(x
2-x1),并将该直线方程作为输电线覆冰骨架曲线在o点的近似切线方程;s4.3:根据斜率k得到经过o点的垂线方程y=(-1/k)*x (1/k)*x
i
y
i
,记录垂线与输电线覆冰两条边缘线的交点o(x
i
,y
i
)、o’(x
k
,y
k
),则输电线覆冰后的像素宽度为:x
i
、x
k
表示交点o和o’的横坐标、y
i
、y
k
表示交点o和o’的纵坐标;s4.4:在携带高清摄像机的无人机上装载高精度gps导航定位系统,即可固定无人机的空间位置和形态,使得摄像机在输电线覆冰前后采集图像时位置和形态一致,如此输电线在前后两次采集到的图像中处于同一位置;已知输电线的直径为r,则输电线覆冰厚度d为:式中,d0为输电线覆冰前在图像中的像素宽度,d1为输电线覆冰后在图像中的像素宽度。
技术总结
基于无人机图像处理的输电线覆冰厚度检测方法,首先,将无人机采集到的原始输电线覆冰RGB图像转换为灰度图像;采用最大类间方差法对灰度图像进行初始分割,完成对原始图像的预处理;结合输电线覆冰信息和背景噪声的连通域特征参数,提取输电线覆冰信息;最后,提出垂线逼近方法获取覆冰输电线垂线方向厚度值,求取覆冰厚度。本发明方法能够更加精准及时的反应输电线路的覆冰状态,从而为指导融冰工作以及做好覆冰事故的预防提供了有力的技术支持。及做好覆冰事故的预防提供了有力的技术支持。及做好覆冰事故的预防提供了有力的技术支持。
技术研发人员:魏业文 贺晓倩 叶峰
受保护的技术使用者:三峡大学
技术研发日:2022.03.29
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。