1.本发明涉及人工智能技术领域,具体涉及一种自主学习的门窗智能控制系统。
背景技术:
2.目前门窗的智能控制都是基于设定好的规则进行操作的,但是这必然要求设定的规则全面且合理。由于不同的家庭用户对门窗的使用习惯不同,例如人们开窗行为,有习惯一回家就打开窗户进行通风的,也有一回家就关窗的。因此,智能化的门窗技术应该基于用户的生活习惯进行门窗的智能控制,避免给用户带来诸多不适,而不是强硬的按照固定的指令进行控制,无法融入用户的生活中。
技术实现要素:
3.为了解决上述技术问题,本发明的目的在于提供一种自主学习的门窗智能控制系统,所采用的技术方案具体如下:
4.本发明实施例提供了一种自主学习的门窗智能控制系统,该系统包括:
5.神经网络训练单元,用于利用传感器获取门窗状态数据集和对应环境状态数据集以训练dnn网络;
6.冲突数据获取单元,用于基于当前环境状态,利用所述dnn网络获取第一时刻下所述当前环境状态对应的第一门窗状态;基于用户的喜好,获取所述用户改变所述第一门窗状态时的第二时刻和改变后的实际门窗状态;结合所述第一时刻、所述第二时刻、所述第一门窗状态和所述实际门窗状态得到冲突程度;
7.调整数据获取单元,用于基于所述实际门窗状态对应的所述当前环境状态,分别计算所述当前环境状态和所述环境状态数据集中每个环境状态之间的相关程度;结合所述相关程度和所述冲突程度获取每个所述环境状态对应的调整程度;
8.网络重新训练单元,用于利用所述调整程度调整所述门窗状态数据集中对应的标准门窗状态以得到新门窗状态数据集,利用所述新门窗状态数据集和所述环境状态数据集重新训练所述dnn网络。
9.优选的,所述冲突数据获取单元中所述冲突程度的获取方法,包括:
10.根据所述第一时刻和所述第二时刻得到冲突速度;根据所述第一门窗状态和所述实际门窗状态得到冲突力度;结合所述冲突速度和所述冲突力度得到所述冲突程度。
11.优选的,所述调整数据获取单元中所述分别计算所述当前环境状态和所述环境状态数据集中每个环境状态之间的相关程度的获取方法,包括:
12.通过自编码器网络对所述当前环境状态和所述环境状态数据集进行降维得到所有环境状态的二维坐标点以形成二维环境状态集合;
13.基于密度聚类对所述二维环境状态集合进行聚类以得到多个环境类别,根据所述环境类别获取所述当前环境状态与所述环境状态数据集中每个环境状态之间的所述相关程度。
14.优选的,所述调整数据获取单元中所述根据所述环境类别获取所述当前环境状态与所述环境状态数据集中每个环境状态之间的所述相关程度的方法,包括:
15.基于聚类后的所述环境类别,计算所述当前环境状态与所述环境状态数据集中每个环境状态之间的初始相关指标;
16.根据所述当前环境状态对应的所述第一门窗状态和所述环境状态数据集中每个环境状态对应的所述标准门窗状态得到每个环境状态对应的调整系数;
17.由所述初始相关指标和所述调整系数得到所述环境状态数据集中每个环境状态对应的所述相关程度。
18.优选的,所述调整数据获取单元中所述初始相关指标的获取方法,包括:
19.基于所述当前环境状态所属的第一环境类别,利用所述当前环境状态的所述二维坐标点分别计算所述第一环境类别中其他每个环境状态的所述初始相关指标和每个其他环境类别中每个环境状态的所述初始相关指标。
20.优选的,所述调整数据获取单元中所述第一环境类别中其他每个环境状态的所述初始相关指标的获取方法,包括:
21.根据所述当前环境状态对应的所述二维坐标点与所述第一环境类别中其他环境状态对应的所述二维坐标点,计算两个所述二维坐标点之间的欧式距离,由所述欧式距离得到对应环境状态的所述初始相关指标。
22.优选的,所述调整数据获取单元中所述每个其他环境类别中每个环境状态的所述初始相关指标的获取方法,包括:
23.计算所述当前环境状态的所述二维坐标点与所述其他环境类别中每个环境状态的所述二维坐标点之间的第一距离;
24.计算所述第一环境类别和所述其他环境类别之间的类别间隔系数,结合所述类别间隔系数和所述第一距离得到每个所述其他环境类别中每个环境状态的所述初始相关指标。
25.优选的,所述调整数据获取单元中所述类别间隔系数的获取方法,包括:
26.分别计算所述第一环境类别的中心点坐标和每个所述其他环境类别的所述中心点坐标之间的第二距离;
27.根据所述第一环境类别和所述其他环境类别的离散程度得到每个所述其他环境类别的聚类可靠程度;
28.结合所述第二距离和所述聚类可靠程度得到每个所述其他环境类别对应的所述类别间隔系数。
29.本发明实施例至少具有如下有益效果:基于用户的个人习惯,获取用户相较于dnn网络对门窗控制的冲突数据,利用冲突数据对训练dnn网络的数据集进行调整,以根据调整后的数据集进行dnn网络的重新训练,进而能够得到更加符合用户习惯的门窗控制系统。
附图说明
30.为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,
还可以根据这些附图获得其它附图。
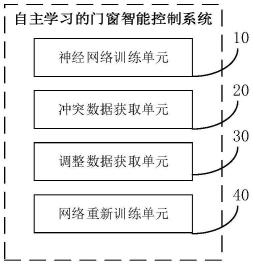
31.图1为本发明一个实施例提供的一种自主学习的门窗智能控制系统的结构框图。
具体实施方式
32.为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的一种自主学习的门窗智能控制系统,其具体实施方式、结构、特征及其功效,详细说明如下。在下述说明中,不同的“一个实施例”或“另一个实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构、或特点可由任何合适形式组合。
33.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
34.下面结合附图具体的说明本发明所提供的一种自主学习的门窗智能控制系统的具体方案。
35.请参阅图1,其示出了本发明一个实施例提供的一种自主学习的门窗智能控制系统的结构框图,该系统包括神经网络训练单元10、冲突数据获取单元20、调整数据获取单元30以及网络重新训练单元40。其中,
36.神经网络训练单元10,用于利用传感器获取门窗状态数据集和对应环境状态数据集以训练dnn网络。
37.具体的,布置传感器获取周围的环境状态数据集和门窗状态数据集:利用传感器每间隔2h采集一次数据。门窗技术要实现根据周围环境状态给出门窗状态指令数据的任务,需得到周围环境状态与门窗状态之间的相关关系。为了更精确的描述,增强其泛化能力,所以本发明实施例采用dnn网络来实现,该dnn网络的训练过程如下:
38.(1)使用数据集为利用传感器采集的环境状态数据集和门窗状态数据集,其中随机选择数据集的80%作为训练数据集,剩余20%作为验证集。
39.(2)环境状态数据作为输入,门窗状态数据作为输出。
40.(3)网络的任务是回归,使用的损失函数为均方差损失函数。
41.冲突数据获取单元20,用于基于当前环境状态,利用dnn网络获取第一时刻下当前环境状态对应的第一门窗状态;基于用户的喜好,获取用户改变第一门窗状态时的第二时刻和改变后的实际门窗状态;结合第一时刻、第二时刻、第一门窗状态和实际门窗状态得到冲突程度。
42.具体的,为了使门窗调控指令能够更符合用户的个人使用习惯,需要分析现有指令与个人喜好的冲突数据,基于冲突数据计算出门窗状态数据集的调整程度,以得到个性化数据。进而通过个性化数据得到更加符合用户个人习惯的门窗系统。
43.分析门窗调控指令的现有指令与用户点的个人喜好之间的冲突性,具体过程为:
44.要判断现有指令与个人喜好的冲突程度,需分析指令执行后,用户改变指令执行结果(门窗状态)的间隔时间(即冲突速度),同时还要考虑用户改变指令执行结果(门窗状态)的程度(冲突力度),以通过冲突速度和冲突力度来描述冲突程度。
45.作一个示例:在第一时刻t1采集当前环境状态,利用dnn网络得到当前环境状态下的第一门窗状态z1;基于用户的习惯,用户在第二时刻t2调整该门窗得到实际门窗状态z,根
据第一时刻和第二时刻得到冲突速度cs=t
2-t1,根据第一门窗状态和实际门窗状态得到冲突力度ci=z
2-z1,进而结合冲突速度和冲突力度得到冲突程度ct=cs*ci。
46.调整数据获取单元30,用于基于实际门窗状态对应的当前环境状态,分别计算当前环境状态和环境状态数据集中每个环境状态之间的相关程度;结合相关程度和冲突程度获取每个环境状态对应的调整程度。
47.具体的,由于用户的个人调整数据相对较少,且只利用这些数据更新dnn网络的结果不是很明显,因此,需要根据用户的个人喜好对dnn网络的数据集进行调整,以生成符合用户习惯的个性化数据。
48.将当前环境状态和训练dnn网络的数据集中的环境状态数据集进行降维处理:利用自编码技术对环境状态数据进行降维处理,将该数据从m维至2维。其中本发明实施例降维处理利用的是编码器-解码器结构的自编码器网络,自编码器网络的训练过程为:
49.(1)输入为当前环境状态和环境状态数据集,输出为解码后的二维环境状态集合。
50.(2)自编码器网络的损失函数使用均方差函数。
51.通过自编码器网络对当前环境状态和环境状态数据集进行降维得到所有环境状态的二维坐标点,以形成二维环境状态集合,即{(u1,v1),(u2,v
a2
),
…
,(um,vm)},其中(u1,v1)表示第1个环境状态的二维坐标点;m为二维环境状态集合中环境状态的数量。
52.基于密度聚类对二维环境状态集合进行聚类以得到多个环境类别,根据环境类别获取当前环境状态与环境状态数据集中每个环境状态之间的相关程度:
53.(1)基于聚类后的环境类别,计算当前环境状态与环境状态数据集中每个环境状态之间的初始相关指标。
54.具体的,基于当前环境状态所属的第一环境类别,利用当前环境状态的二维坐标点分别计算第一环境类别中其他每个环境状态的初始相关指标和其他环境类别中每个环境状态的初始相关指标。
55.作为一个示例,为了便于后面的理解,本发明实施例假设当前环境状态d所属的第一环境类别设为sa,而对于第一环境类别中其他每个环境状态的初始相关指标:根据当前环境状态d对应的二维坐标点(ud,vd)与第一环境类别sa中其他环境状态q对应的二维坐标点(uq,vq),计算两个二维坐标点之间的欧式距离由欧式距离得到对应环境状态q的初始相关指标
56.作为另一个示例,对于其他环境类别中每个环境状态的初始相关指标,根据当前环境状态d所属的第一环境类别sa,计算其他环境类别中每个环境状态的初始相关指标,具体为:
57.a.以其他环境类别sb为例,计算当前环境状态d的二维坐标点(ud,vd)与其他环境类别sb中第i个环境状态的二维坐标点(u
bi
,v
bi
)之间的第一距离
58.b.计算第一环境类别和其他环境类别之间的类别间隔系数,结合类别间隔系数和第一距离得到每个其他环境类别中每个环境状态的初始相关指标。
59.作为一个示例,分别计算第一环境类别的中心点坐标和每个其他环境类别的中心点坐标之间的第二距离:假设第一环境类别sa的中心点坐标为(u
ao
,v
ao
)、其他环境类别sb的
中心点坐标为(u
bo
,v
bo
),计算中心点坐标之间的第二距离
60.分别计算第一环境类别sa与其他环境类别sb的离散程度:
[0061][0062]
其中,σa为第一环境类别sa的离散程度;f为环境类别sa中环境状态的数量;(u
ai
,v
ai
)为第一环境类别sa中第i个环境状态的二维坐标点;(u
a(i-1)
,v
a(i-1)
)为第一环境类别sa中第(i-1)个环境状态的二维坐标点。
[0063][0064]
其中,σb为其他环境类别sb的离散程度;n为其他环境类别sb中环境状态的数量;(u
bi
,v
bi
)为其他环境类别sb中第i个环境状态的二维坐标点;(u
b(i-1)
,v
b(i-1)
)为其他环境类别sb中第(i-1)个环境状态的二维坐标点。
[0065]
根据第一环境类别sa与其他环境类别sb的离散程度得到其他环境类别sb对应的聚类可靠程度:
[0066][0067][0068]
其中,σ为平均离散程度;kb为其他环境类别sb对应的聚类可靠程度。
[0069]
结合聚类可靠程度和第二距离得到其他环境类别sb对应的类别间隔系数
[0070]
由其他环境类别sb对应的类别间隔系数αb和第一距离d
bi
计算其他环境类别sb中每个环境状态对应的初始相关指标,即其中,m
bi
为环境类别sb中第i个环境状态对应的初始相关指标。
[0071]
c.通过步骤a至步骤b能够得到每个其他环境类别中每个环境状态的初始相关指标。
[0072]
(2)根据当前环境状态对应的第一门窗状态和环境状态数据集中每个环境状态对应的标准门窗状态得到每个环境状态对应的调整系数。
[0073]
具体的,由于通过聚类后计算当前环境状态与环境状态数据集中每个环境状态的初始相关指标较大时,会出现对应两种环境状态下的门窗状态的差异却很大,进而在这种情况下得到的初始相关指标不够准确,因此,需要结合门窗状态来获取一个调整系数,则调整系数的获取方法为:已知当前环境状态对应的第一门窗状态为z1,假设环境状态数据集中的环境状态j对应的标准门窗状态为zj,由第一门窗状态和标准门窗状态计算环境状态j对应的调整系数其中za和zb为门窗状态的范围;δ为分母防零参数。
[0074]
(3)由初始相关指标和调整系数得到环境状态数据集中每个环境状态对应的相关
程度。
[0075]
相关程度的计算公式为:
[0076]
xi=mi*(1 wi)
[0077]
其中,xi为环境状态数据集中第i个环境状态对应的相关程度;mi为第i个环境状态对应的初始相关指标;wi为第i个环境状态对应的调整系数。
[0078]
进一步地,利用冲突程度和相关程度获取环境状态数据集中每个环境状态对应的调整程度:
[0079]
ni=xi*ct
[0080]
其中,ni为环境状态数据集中第i个环境状态对应的调整程度。
[0081]
需要说明的是,为了便于对dnn网络的数据集进行调整,对调整程度进行归一化处理:ni′
=ni*γ,其中γ为归一化系数。
[0082]
网络重新训练单元40,用于利用调整程度调整门窗状态数据集中对应的标准门窗状态以得到新门窗状态数据集,利用新门窗状态数据集和环境状态数据集重新训练dnn网络。
[0083]
具体的,通过冲突数据获取单元20和调整数据获取单元30得到环境状态数据集中每个环境状态对应的调整程度,利用调整程度调整对应环境状态的标准门窗状态,由调整后的标准门窗状态重新形成新门窗状态数据集,进而利用新门窗状态数据集和环境状态数据集重新训练dnn网络,以得到符合用户个性化的门窗控制系统,其中标准门窗状态调整的计算公式为:
[0084]
zi′
=(1 ni′
)*zi[0085]
综上,本发明实施例提供了一种自主学习的门窗智能控制系统,该系统包括神经网络训练单元,用于利用传感器获取门窗状态数据集和对应环境状态数据集以训练dnn网络;冲突数据获取单元,用于基于当前环境状态,利用dnn网络获取第一时刻下当前环境状态对应的第一门窗状态;基于用户的喜好,获取用户改变第一门窗状态时的第二时刻和改变后的实际门窗状态;结合第一时刻、第二时刻、第一门窗状态和实际门窗状态得到冲突程度;调整数据获取单元,用于基于实际门窗状态对应的当前环境状态,分别计算当前环境状态和环境状态数据集中每个环境状态之间的相关程度;结合相关程度和冲突程度获取每个环境状态对应的调整程度;网络重新训练单元,用于利用调整程度调整门窗状态数据集中对应的标准门窗状态以得到新门窗状态数据集,利用新门窗状态数据集和环境状态数据集重新训练dnn网络。基于用户的个人习惯,获取用户相较于dnn网络对门窗控制的冲突数据,利用冲突数据对dnn网络的重新训练,进而能够得到更加符合用户习惯的门窗控制系统。
[0086]
需要说明的是:上述本发明实施例先后顺序仅仅为了描述,不代表实施例的优劣。且上述对本说明书特定实施例进行了描述。其它实施例在所附权利要求书的范围内。在一些情况下,在权利要求书中记载的动作或步骤可以按照不同于实施例中的顺序来执行并且仍然可以实现期望的结果。另外,在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
[0087]
本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
[0088]
以上仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。