技术特征:
1.一种基于优势点的线性刀轨的b样条拟合方法,其特征在于,包括下列步骤:步骤一:基于局部三次多项式拟合和双向扫描方案的优势点选取;设给定的原始线性轨迹为p={p0,p1,
…
,p
n
},首先给每个刀位点赋上对应的参数值t
i
(i=0,1,
…
,n),采用累计弧长参数化方法,具体计算公式如下:其中采用离散方法计算刀位点p
i
(i=1,2,
…
,n-1)点对应的曲率k
i
,计算公式如下:将原始线性轨迹分为多个连续的子轨迹,每一个子轨迹包含的刀位点都可以由一个三次多项式拟合,且拟合误差不超过给定的精度要求ε;先选择p
i
(i=1,2,
…
,n-1)中曲率k
i
最大的点p
j
为第一个分界点,然后根据双向扫描方案在点p
j
两侧各生成一个子轨迹;记p={p0,p1,
…
,p
n
}被划分为m 1个子集合,分别是和则p0,和p
n
被选择为优势点;步骤二:节点矢量的生成和基于最小二乘理论的控制点计算;记步骤一中选取出来的优势点集合为记步骤一中选取出来的优势点集合为这些点对应的参数为v
i
(i=0,1,
…
,m 1);初始b样条曲线的节点矢量u={u0,u1,
…
,u
m 7
}根据平均原则生成,具体计算公式如下:之后基于最小二乘法计算控制点,以拟合误差的平方和最小为原则,得到如下的目标函数:为了使拟合得到的b样条曲线经过线性轨迹的起点和终点,以下条件也需要被满足:b(0)=p0,b(1)=p
n
ꢀꢀꢀꢀꢀꢀ
(5)求解由式(4)和(5)构成的线性最优化问题,可以解析计算出控制点,从而确定初始的拟合b样条曲线为:步骤三:估计拟合误差,基于拟合误差插入新的优势点并修正拟合b样条;首先估算每一个刀位点p
i
(i=0,1,
…
,n)在b(u)上的垂足的参数uf
i
,这里的垂足指的是b(u)上距离点p
i
最近的点;令uf
i
的初值采用牛顿法迭代的计算uf
i
;
记给定的阈值为δ,当时,根据下式更新参数值:其中b'(u)和b”(u)为b(u)的一阶和二阶导数,直到error
j
≤δ或者j大于设置的最大迭代次数时停止;每个刀位点p
i
的拟合误差e
i
=||p
i-b(uf
i
)||;当b(u)的拟合误差e=maxe
i
大于给定的拟合精度μ时,向优势点集合q中加入新的优势点,当i
j 1-i
j
≥2时,和之间存在刀位点若则一个新的优势点被加入到q中,且位于和之间;新的优势点的序号由下式计算:当j从0遍历到m时,得到了一个新的优势点集合q,再根据新的优势点集合q通过步骤二计算节点矢量和控制点,并检查新的拟合b样条曲线的误差是否满足精度要求;循环进行步骤二和步骤三,直到拟合b样条曲线的拟合误差满足精度要求或循环次数达到给定最大值时停止。2.根据权利要求1所述的基于优势点的线性刀轨的b样条拟合方法,其特征在于,所述步骤一中,在点p
j
两侧各生成一个子轨迹的方法包括正向扫描流程和反向扫描流程,其中正向扫描的流程为:(1)初始化每一个子轨迹中刀位点数目的最大值n
max
和最小值n
min
,这里n
min
≥5,令n
c6rrent
=n
min
;(2)若j n
c6rrent-1≤n,则转步骤(3);否则,令n
c6rrent
=n 1-j,并转步骤(5);(3)对点集及其对应的参数使用三次多项式拟合,得到计算拟合误差e
c6rrent
=max{||f
current
(t
i
)-p
i
||,i=j,j 1,
…
,j n
c6rrent-1};若e
current
<ε,则转步骤(4);否则,令n
c6rrent
=n
current-1,并转步骤(5);(4)若j n
current-1<n且n
current
<n
max
,令n
current
=n
current
1,转步骤(3);否则,转步骤(5);(5)输出一个子集合反向扫描流程为:
①
初始化每一个子轨迹中刀位点数目的最大值n
max
和最小值n
min
,这里n
min
≥5,令n
current
=n
min
;
②
若j-n
current
1≥0,则转步骤
③
;否则,令n
current
=j 1,并转步骤
⑤
;
③
对点集及其对应的参数使用三次多项式拟合,得到使用三次多项式拟合,得到计算拟合误差e
current
=max{||f
current
(t
i
)-p
i
||,i=j-n
current
1,j-n
current
2
…
,j};若e
current
<ε,则转步骤
④
;否则,令n
current
=n
current-1,并转步骤
⑤
;
④
若j-n
current
1>0且n
current
<n
max
,令n
current
=n
current
1,转步骤
③
;否则,转步骤
⑤
;
⑤
输出一个子集合记正向扫描和反向扫描得到的两个子集合分别是和其中n
b
和n
f
分别是这两个子集合中点的个数;当j-n
b
1>0且j-n
f
1<n时,还会剩余有两个线性轨迹和当j-n
b
2<n
max
时,q1被视为一个子集合,否则选择q1中曲率最大的点采用双向扫描方案再次划分;当n-j-n
f
2<n
max
时,q2被视为一个子集合,否则选择q2中曲率最大的点采用双向扫描方案再次划分;循环操作直到不存在这样的线性轨迹q1和q2时停止。3.根据权利要求1所述的基于优势点的线性刀轨的b样条拟合方法,其特征在于,所述步骤三中,对于优势点集合q中任意两个连续的优势点和和之间,每次至多只增加一个优势点。
技术总结
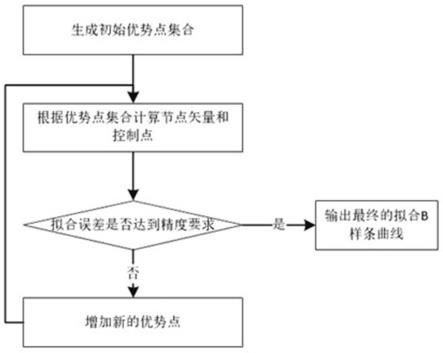
本发明公开了一种基于优势点的线性刀轨的B样条拟合方法,首先基于局部三次多项式拟合和双向扫描方案,从轨迹离散点中选择一些能表示轨迹几何特征的优势点。根据选择出来的优势点,生成节点向量,并基于最小二乘方法计算控制点,从而得到初始的拟合B样条。最后使用基于牛顿法的拟合误差估计方案和基于拟合误差的优势点插入方案,迭代的修正拟合B样条,直到拟合精度达到要求时停止。本发明通过离散点特征提取、线性轨迹的近似、样条曲线的迭代优化,使用三次B样条曲线近似由连续微小线段表示的刀路轨迹,可以提升轨迹的光滑性,并最终提高加工效率。加工效率。加工效率。
技术研发人员:姜鑫 胡一飞 霍冠英 苏澄 王博伦 李禾雄 郑志明
受保护的技术使用者:郑州航空港经济综合实验区空港人工智能研究院
技术研发日:2022.03.29
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。