1.本技术属于航空发动机叶片控制领域,特别涉及一种航空发动机可调静子叶片角度自适应控制方法及系统。
背景技术:
2.为了保证航空发动机压气机稳定裕度和性能能够满足不同使用条件的需要,某型发动机压气机可调静子叶片角度(简称α2)除在传统的α2=f(n2,t1)(其中t1为发动机进口总温)的控制方式外,还组合引入了α2=f(n2,t
25
)(其中t
25
为压气机进口总温)。在需要稳定裕度时(如节流状态),取偏安全的控制方式进行控制(一般为α2偏关的方向);在需要性能时(如中间及以上状态),直接采用α2=f(n2,t
25
)的控制方式。这就涉及到两种控制方式的切换,有时两种控制方式下α2的控制计划值差异较大,导致切换时发动机参数摆动较大(尤其是在限制高压转速时,参数摆动非常剧烈),甚至出现参数震荡不收敛的问题。
3.由于该问题出现的时机不确定,很难在地面台架状态进行模拟再现(即使地面模拟再现也不一定能代表全包线范围的使用情况),需要通过大量的试验(地面和空中)摸索,适应性调整控制参数来解决,该方式不仅排故周期长,而且需要大量的经费(台架试车,甚至高空台试车、试飞等),还会给控制参数在全包线范围内适用性带来一定的不确定性。
4.因此,如何实现航空发动机可调静子叶片角度的稳定切换控制是一个需要解决的问题。
技术实现要素:
5.本技术的目的是提供了一种航空发动机可调静子叶片角度自适应控制方法及系统,以解决现有技术中航空发动机可调静子叶片角度切换过程中会出现参数剧烈摆动和参数震荡不收敛的问题。
6.本技术的技术方案是:一种航空发动机可调静子叶片角度自适应控制方法,包括:确定可调静子叶片角度切换过程中的最大可接受差值δα2;判断需要切换的前后可调静子叶片角度差值是否大于最大可接受差值δα2°
,若大于,则将切换后的给定值设置为切换前给定值加/减δα2°
,持续δts;再次判断需要切换的前后可调静子叶片角度差值是否大于最大可接受差值δα2°
,若大于,则将切换后的给定值设置为本次切换前、上次切换后的给定值加/减δα2°
,持续δts;反复执行该步骤,直至需要切换的前后可调静子叶片角度差值小于最大可接受差值δα2°
;选择切换后的可调静子叶片角度控制计划值对叶片进行控制,进行最终切换。
7.优选地,在进行所述可调静子叶片角度切换的过程中,统计是否出现参数大幅摆动的情况,若出现,则将最大可接受差值δα2°
自动减小δ1
°
,若未出现则自动将可调静子叶片角度增加δ1
°
。
8.作为一种具体实施方式,一种航空发动机可调静子叶片角度自适应控制系统,包括:角度控制单元,用于根据可调静子叶片角度调节量对静子叶片进行控制;角度切换单
元,用于对可调静子叶片的角度进行切换;差值判断单元,用于判断需要切换的前后可调静子叶片角度差值是否大于最大可接受差值δα2°
。
9.优选地,还包括摆动统计单元,用于统计静子叶片角度切换的过程中,是否出现参数大幅摆动的情况;差值调整单元,用于调整最大可接收差值δα2°
。
10.本技术的一种航空发动机可调静子叶片角度自适应控制方法,通过设置可调静子叶片角度切换过程中的最大可接受差值δα2,当静子可调叶片在最大可接受差值δα2范围内进行调整时,发动机叶片在切换过程中参数不会出现大幅摆动或者不收敛的现象;若需要切换的前后可调静子叶片角度差值较大时,如差值为最大可接受差值的2倍、3倍或者更大,这时采用分段切换的方法进行切换,一次切换最大可接受的量,直至达到所需的静子叶片角度,完成切换,当每次切换完成后,通过持续δts来稳定静子可调叶片的当前角度状态;由于每次均在最大可接收差值的范围内进行切换,因此可以保证在整个切换的过程中参数均不会出现大幅摆动或者不收敛的现象。不仅节约大量的试车/试飞资源,还可以规避控制参数调整带来的全包线范围内适用性的不确定性风险,能够有效的解决α2控制切换过程中参数摆动问题。
附图说明
11.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
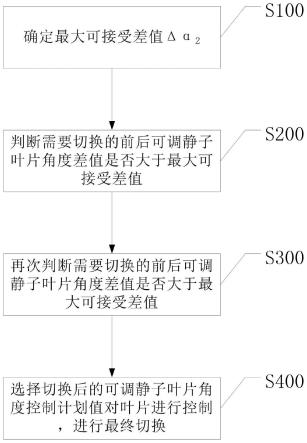
12.图1为本技术整体流程示意图。
具体实施方式
13.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
14.一种航空发动机可调静子叶片角度自适应控制方法,如图1所示,包括如下步骤:
15.步骤s100,确定可调静子叶片角度切换过程中的最大可接受差值δα2;
16.步骤s200,判断需要切换的前后可调静子叶片角度差值是否大于最大可接受差值δα2°
,若大于,则将切换后的给定值设置为切换前给定值加/减δα2°
,持续δts;若不大于,则直接执行步骤s400;
17.步骤s300,再次判断需要切换的前后可调静子叶片角度差值是否大于最大可接受差值δα2°
,若大于,则将切换后的给定值设置为本次切换前、上次切换后的给定值加/减δα2°
,持续δts;反复执行该步骤,直至需要切换的前后可调静子叶片角度差值小于最大可接受差值δα2°
;
18.步骤s400,选择切换后的可调静子叶片角度控制计划值对叶片进行控制,进行最终切换。
19.通过设置可调静子叶片角度切换过程中的最大可接受差值δα2,当静子可调叶片在最大可接受差值δα2范围内进行调整时,发动机叶片在切换过程中参数不会出现大幅摆动或者不收敛的现象;若需要切换的前后可调静子叶片角度差值较大时,如差值为最大可接受差值的2倍、3倍或者更大,这时采用分段切换的方法进行切换,一次切换最大可接受的量,直至达到所需的静子叶片角度,完成切换,如需要调节10
°
,最大可接收差值为5
°
,则每
次调节5
°
,分两次完成;当每次切换完成后,通过持续δts来稳定静子可调叶片的当前角度状态;由于每次均在最大可接收差值的范围内进行切换,因此可以保证在整个切换的过程中参数均不会出现大幅摆动或者不收敛的现象。不仅节约大量的试车/试飞资源,还可以规避控制参数调整带来的全包线范围内适用性的不确定性风险,能够有效的解决α2控制切换过程中参数摆动问题。
20.优选地,在进行可调静子叶片角度切换的过程中,统计是否出现参数大幅摆动的情况,若出现,则将最大可接受差值δα2°
自动减小δ1
°
,若未出现则自动将可调静子叶片角度增加δ1
°
。由于设定的最大可接受差值δα2不一定是最合适的值,如果大于该值也有可能参数不会出现大幅摆动或者不收敛的现象,因此通过每次增加δ1
°
来增加最大可接收差值的数值,这样可调静子叶片角度切换的跨度更大,调节的时间更短,能够更快地满足所需要达到的角度值。
21.在进行分段切换的过程中,由于每次切换均需要持续一定时间来进行稳定,在需要切换的前后可调静子叶片角度差值较大时,会导致切换的时间的时间过长。基于此问题,在时间过长时,可以通过调整航空发动机其它部分来解决,如在可调范围内增大转子部件的功率等,先满足稳定裕度或性能的目标状态,而后随着可调静子叶片角度的逐步调节,逐渐减少转子部件功率的增大部分,直至可调静子叶片角度调节完成后,转子部件的功率恢复原状,这样不会因此可调静子叶片的调节时间过长而影响稳定裕度或性能的要求。
22.作为一种具体实施方式,一种航空发动机可调静子叶片角度自适应控制系统,包括:角度控制单元,用于根据可调静子叶片角度调节量对静子叶片进行控制;角度切换单元,用于对可调静子叶片的角度进行切换;差值判断单元,用于判断需要切换的前后可调静子叶片角度差值是否大于最大可接受差值δα2°
。在设置最大可接受差值δα2时,通过角度切换单元来实现可调静子叶片角度的分阶段切换,通过差值判断单元来判断下一步是否还需要进行切换,通过角度控制单元来对可调静子叶片进行控制,三个单元相互配合,来实现对可调静子叶片角度稳定的分阶段切换。
23.优选地,还包括摆动统计单元,用于统计静子叶片角度切换的过程中,是否出现参数大幅摆动的情况;差值调整单元,用于调整最大可接收差值δα2°
。通过设置摆动统计单元和差值调整单元来对最大可接受差值δα2的大小进行调整,以能够减少可调静子叶片角度调节的时间,提高调节的效率。
24.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。