1.本发明涉及实时仿真控制的技术领域,具体地,涉及一种用于主被动雷达探测装置仿真的交班控制方法及系统。尤其是,优选的涉及一种用于x\w主被动雷达探测装置仿真的交班控制方法。
背景技术:
2.随着无线通讯技术的快速发展,部分先进的武器系统雷达探测装置,其工作模式已从单一的主动或被动模式扩展到了主被动复合模式。
3.x\w主被动雷达探测装置,通过x频段的被动天线探测接收能自身发出射频信号的辐射目标,实现稳定跟踪,在武器攻击的末端,通过w频段的主动天线实现对目标的射频成像和目标判别,有效地提高了武器系统的抗干扰能力。x\w是指x频段和w频段双频段复合。
4.为了验证x\w主被动雷达探测装置的探测跟踪和抗干扰性能,需要构建覆盖x\w频段的电磁环境条件。机械式可重构的射频成像半实物仿真系统,其目标平台上可安装雷达探测装置所需的x频段和w频段两套目标模拟装置,在进行x\w主被动雷达探测装置性能验证仿真试验过程中,能够实时切换满足其电磁环境需求的目标特性信号。
5.公开号为cn110701963a的中国发明专利文献公开了一种红外/雷达复合导引头交班性能改进方法,具体过程为:复合导引头信息融合处理系统向导引头伺服系统发送切换指令、红外跟踪偏差及雷达角度偏差;复合导引头伺服系统接收到切换指令及红外跟踪偏差时,暂时不进入红外跟踪状态,将红外跟踪偏差转化为雷达跟踪角度偏差送雷达跟踪回路进行目标跟踪;当雷达跟踪角度偏差在设定的θ角度范围以内时,导引头伺服系统由雷达跟踪回路切换为红外跟踪回路,使视线角速度输出在交班时平滑过渡。
6.针对上述中的相关技术,发明人认为在武器实际攻击目标过程中,x和w频段的目标特性信号辐射位置是重合的,但在半实物仿真系统中,安装在目标平台上的两套目标模拟装置只能保证一个在目标视场中心,较难实现目标视场中心从x频段到w频段过渡的稳定控制。
技术实现要素:
7.针对现有技术中的缺陷,本发明的目的是提供一种用于主被动雷达探测装置仿真的交班控制方法及系统。
8.根据本发明提供的一种用于主被动雷达探测装置仿真的交班控制方法,包括如下步骤:
9.探测步骤:探测目标信息,并根据目标信息变换工作状态;
10.解析步骤:采集工作状态信息,根据工作状态信息解析出标志信息和控制指令;
11.响应步骤:响应标志信息和控制指令。
12.优选的,所述探测步骤包括如下步骤:
13.信号探测步骤:执行被动波段工作状态,实时探测目标信息,根据目标信息进行判
断,若满足交班条件,记录交班开始时刻;
14.计时步骤:从交班开始时刻开始计时;若计时时长满足交班时长,给出交班结束标志,开启主动波段工作状态;若计时时长不满足交班时长,给出交班标志,保持交班起始点工作状态。
15.优选的,在所述解析步骤中,实时采集主动波段工作状态信息或者交班起始点工作状态信息;
16.所述标志信息包括交班结束标志或交班标志;
17.所述控制指令包括交班过程中控制指令和交班结束后控制指令;
18.所述交班过程中控制指令包括交班过程中目标运动平台控制指令和交班过程中飞行转台控制指令;
19.所述交班结束后控制指令包括交班结束后目标运动平台控制指令和交班结束后飞行转台控制指令。
20.优选的,所述响应步骤包括交班标志响应步骤:根据交班标志关闭目标信息;
21.执行交班过程中目标运动平台控制指令和交班过程中飞行转台控制指令,返回计时步骤。
22.优选的,所述响应步骤包括结束标志响应步骤:根据交班结束标志开启目标信息;
23.执行交班结束后目标运动平台控制指令和交班结束后飞行转台控制指令,交班结束。
24.根据本发明提供的一种用于主被动雷达探测装置仿真的交班控制系统,包括主被动雷达探测装置、仿真控制系统和响应模块;
25.所述主被动雷达探测装置探测目标信息,并根据目标信息变换工作状态;
26.所述仿真控制系统采集工作状态信息,根据工作状态信息解析出标志信息和控制指令;
27.所述响应模块响应标志信息和控制指令。
28.优选的,所述主被动雷达探测装置执行被动波段工作状态,实时探测目标信息,根据目标信息进行判断,若满足交班条件,记录交班开始时刻;
29.所述主被动雷达探测装置从交班开始时刻开始计时;若计时时长满足交班时长,给出交班结束标志,开启主动波段工作状态;若计时时长不满足交班时长,给出交班标志,保持交班起始点工作状态。
30.优选的,所述仿真控制系统实时采集主动波段工作状态信息或者交班起始点工作状态信息;
31.所述标志信息包括交班结束标志或交班标志;
32.所述控制指令包括交班过程中控制指令和交班结束后控制指令;
33.所述交班过程中控制指令包括交班过程中目标运动平台控制指令和交班过程中飞行转台控制指令;
34.所述交班结束后控制指令包括交班结束后目标运动平台控制指令和交班结束后飞行转台控制指令。
35.优选的,所述响应模块包括目标模拟装置、飞行转台和目标运动平台;
36.所述目标模拟装置根据交班标志关闭目标信息;
37.所述目标运动平台执行交班过程中目标运动平台控制指令;
38.所述飞行转台执行交班过程中飞行转台控制指令。
39.优选的,所述目标模拟装置根据交班结束标志开启目标信息;
40.所述目标运动平台执行交班结束后目标运动平台控制指令;
41.所述飞行转台执行交班结束后飞行转台控制指令。
42.与现有技术相比,本发明具有如下的有益效果:
43.1、本发明的x\w主被动雷达探测装置仿真的交班控制方法,实现了单系统x和w频段的复合仿真,拓展了半实物仿真系统的工作频段;
44.2、本发明的x\w主被动雷达探测装置仿真的交班控制方法,实现了目标视场中心从x频段到w频段过渡的稳定控制,提高了半实物仿真系统的稳定性;
45.3、本发明的x\w主被动雷达探测装置仿真的交班控制方法,保证了x\w主被动雷达探测装置在仿真过程中x频段和w频段的目标视场中心的一致性,提高了半实物仿真系统的高精度仿真能力。
附图说明
46.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
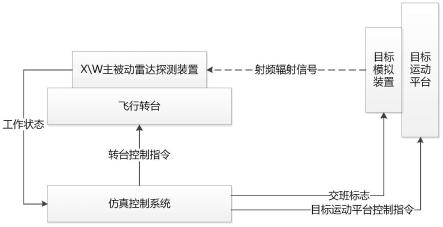
47.图1为本发明所描述的x\w主被动雷达探测装置仿真交班控制方法工作原理图;
48.图2为本发明所描述的x\w主被动雷达探测装置仿真交班控制方法工作流程图。
具体实施方式
49.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
50.本发明实施例公开了一种用于x\w主被动雷达探测装置仿真的交班控制方法,如图1和图2所示,本发明的x\w波段交班控制方法,利用半实物仿真系统,结合被试的x\w主被动雷达探测装置,在被试装置交班仿真过程中,通过算法对目标视线角和转台控制指令进行平滑过渡,用以保证半实物仿真系统的宽频段高精度仿真能力。x\w主被动雷达探测装置仿真交班控制方法的实施包含目标运动平台、目标模拟装置、飞行转台、仿真控制系统以及被试的x\w主被动雷达探测装置,工作原理如图1所示。具体来说,被试x\w主被动雷达探测装置安装在飞行转台上,目标模拟装置安装在目标运动平台上。x波段是指频率在8~12ghz的无线电波波段。w波段是指频率在80~100ghz的无线电波波段。
51.被试x\w主被动雷达探测装置实时探测射频辐射信号,给出工作状态信息。仿真控制系统实时采集被试装置工作状态信息,解算解析并下发控制指令和标志信息(交班标志或交班结束标志)。飞行转台、目标运动平台和目标模拟装置响应指令和标志信息,实现x\w主被动雷达探测装置仿真试验交班的稳定控制。
52.被试x\w主被动雷达探测装置安装在飞行转台上,实时探测目标信息,根据被动段探测出的目标信息进行判断,满足交班条件,给出交班开始标志,被试x\w主被动雷达探测
装置保持交班起始点工作状态。
53.仿真控制系统实时采集x\w主被动雷达探测装置的工作状态信息,实时判别,若进入主被动交班阶段,发送交班标志到目标模拟装置,同时仿真控制系统实时解算交班控制指令,发送给目标运动平台和飞行转台。
54.目标模拟装置接收到交班标志,关闭目标模拟装置的射频辐射信号。目标运动平台和飞行转台执行相应的控制指令。飞行转台执行飞行转台控制指令运动,主被动雷达探测装置跟随飞行转台运动。目标运动平台执行目标运动平台控制指令运动,目标模拟装置跟随目标运动平台运动。
55.被试x\w主被动雷达探测装置根据交班持续时间进行判别,满足交班时长后给出交班完成工作状态标志。
56.目标模拟装置接收到交班完成状态标志后,开启射频辐射信号,完成x\w主被动雷达探测装置仿真试验的交班全过程。
57.该方法包括如下步骤:探测步骤:探测目标信息,并根据目标信息变换工作状态。探测步骤包括如下步骤:信号探测步骤:执行被动波段工作状态,实时探测目标信息,根据目标信息进行判断,若满足交班条件,记录交班开始时刻。
58.计时步骤:从交班开始时刻开始计时;若计时时长满足交班时长,给出交班结束标志,开启主动波段工作状态;若计时时长不满足交班时长,给出交班标志,保持交班起始点工作状态。交班时长是人为设置。满足交班时长是指大于或等于交班时长,不满足是指小于。
59.解析步骤:采集工作状态信息,根据工作状态信息解析出标志信息和控制指令。实时采集主动波段工作状态信息或者交班起始点工作状态信息。标志信息包括交班结束标志或交班标志;控制指令包括交班过程中控制指令和交班结束后控制指令;交班过程中控制指令包括交班过程中目标运动平台控制指令和交班过程中飞行转台控制指令;交班结束后控制指令包括交班结束后目标运动平台控制指令和交班结束后飞行转台控制指令。
60.响应步骤:响应标志信息和控制指令。响应步骤包括交班标志响应步骤:根据交班标志关闭目标信息;执行交班过程中目标运动平台控制指令和交班过程中飞行转台控制指令,返回计时步骤。
61.响应步骤还包括结束标志响应步骤:根据交班结束标志开启目标信息;执行交班结束后目标运动平台控制指令和交班结束后飞行转台控制指令,交班结束。
62.即该方法由以下步骤实现:
63.步骤一、x\w主被动雷达探测装置执行被动x波段工作状态,实时探测目标信息,根据被动x段探测出的目标信息进行判断,满足交班条件,记录交班开始时刻t0。
64.步骤二、x\w主被动雷达探测装置从交班开始时刻t0计时,若满足交班时长t1,给出交班结束标志,x\w主被动雷达探测装置开启主动w波段工作状态,进入步骤六,若不满足交班时长,给出交班标志,x\w主被动雷达探测装置保持交班起始点工作状态。
65.步骤三、仿真控制系统实时采集x\w主被动雷达探测装置的工作状态信息,实时判别,若为交班标志,发送交班标志到目标模拟装置,同时仿真控制系统实时解算交班控制指令,发送给目标运动平台和飞行转台,若为交班结束标志,发送交班结束标志到目标模拟装置,同时仿真控制系统实时解算交班控制指令,发送给目标运动平台和飞行转台,进入步骤
六。
66.步骤四、目标模拟装置接收到交班标志,关闭目标模拟装置的射频辐射信号。
67.步骤五、目标运动平台执行仿真控制系统发出的交班过程中目标运动平台控制指令和飞行转台执行仿真控制系统发出的交班过程中飞行转台控制指令,进入步骤二。
68.步骤六、目标模拟装置接收到交班结束标志,开启目标模拟装置的射频辐射信号,目标运动平台执行仿真控制系统发出的交班结束后目标运动平台控制指令和飞行转台执行仿真控制系统发出的交班结束后飞行转台控制指令,交班结束。
69.本实施例所描述的仿真控制系统实时解算交班控制指令的具体解算过程:
70.以x波段信号辐射装置为基准,结合被试x\w主被动雷达探测装置测量w波段信号辐射装置到该基准的角度误差,高低向误差记为δε,方位向误差记为δβ。
71.高低向和方位向控制过渡调整量ε0和β0为
72.ε0=(t-t0)
×
δεt<t173.ε0=δεt≥t174.β0=(t-t0)
×
δβt<t175.β0=δβt≥t176.其中,t为仿真试验时长,t0为交班起始时刻,t1为交班结束时刻。
77.目标运动平台高低向控制指令ε
*
和方位向控制指令β
*
分别为
78.ε
*
=arcsin(sinεcosε
0-cosεsinε0cos(β-β0))
[0079][0080]
其中,ε和β为理论解算出的无调整量的高低向和方位向控制指令,为已知量。
[0081]
飞行转台控制指令偏航轴φ
*
、俯仰轴θ
*
和滚动轴γ
*
分别为
[0082]
φ
*
=arcsin(sin(φ-β0)cosθ)
[0083][0084][0085]
其中,φ,θ,γ分别为被试x\w主被动雷达探测装置所在平台的偏航、俯仰和滚动姿态角,为已知量。
[0086]
本发明实施例还公开了一种用于主被动雷达探测装置仿真的交班控制系统,如图1和图2所示,包括主被动雷达探测装置、仿真控制系统和响应模块。
[0087]
主被动雷达探测装置探测目标信息,并根据目标信息变换工作状态。主被动雷达探测装置执行被动波段工作状态,实时探测目标信息,根据目标信息进行判断,若满足交班条件,记录交班开始时刻。
[0088]
主被动雷达探测装置从交班开始时刻开始计时;若计时时长满足交班时长,给出交班结束标志,开启主动波段工作状态;若计时时长不满足交班时长,给出交班标志,保持交班起始点工作状态。
[0089]
仿真控制系统采集工作状态信息,根据工作状态信息解析出标志信息和控制指令。仿真控制系统实时采集主动波段工作状态信息或者交班起始点工作状态信息。
[0090]
标志信息包括交班结束标志或交班标志。控制指令包括交班过程中控制指令和交班结束后控制指令。交班过程中控制指令包括交班过程中目标运动平台控制指令和交班过程中飞行转台控制指令。交班结束后控制指令包括交班结束后目标运动平台控制指令和交班结束后飞行转台控制指令。
[0091]
响应模块响应标志信息和控制指令。响应模块包括目标模拟装置、飞行转台和目标运动平台。目标模拟装置根据交班标志关闭目标信息,或者根据交班结束标志开启目标信息。目标信息为目标模拟装置发出的射频辐射信号。
[0092]
目标运动平台执行交班过程中目标运动平台控制指令或交班结束后目标运动平台控制指令。飞行转台执行交班过程中飞行转台控制指令或交班结束后飞行转台控制指令。
[0093]
本发明的x\w主被动雷达探测装置仿真的交班控制方法,主要作用是实现雷达探测装置仿真从被动x频段到主动w频段交班的稳定控制,以保证高精度的仿真。本发明利用半实物仿真目标运动平台、飞行转台和目标模拟装置,结合被试雷达探测装置,在半实物仿真交班控制回路中通过算法实现了雷达探测装置仿真从被动x频段到主动w频段的平稳过渡,提高了机械阵可重构射频成像半实物仿真系统的宽频段高精度仿真能力。
[0094]
本发明实现了目标视场中心从x频段到w频段过渡的稳定控制。本发明用半实物仿真目标运动平台、飞行转台和目标模拟装置,结合被试雷达探测装置,在半实物仿真交班控制回路中通过算法实现了雷达探测装置仿真从被动x频段到主动w频段的平稳过渡。
[0095]
本发明的用于x\w主被动雷达探测装置仿真的交班控制方法,涉及实时仿真控制技术领域,它解决了x\w主被动雷达探测装置仿真试验过程中主被动交班的稳定控制问题。x\w主被动雷达探测装置根据探测的目标信息实时给出其工作状态,仿真控制系统实时采集被试装置工作状态,解算控制指令并下发,飞行转台、目标运动平台和目标模拟装置执行相应的控制指令,完成交班的平稳过渡。x\w主被动雷达探测装置仿真的交班控制方法,实现了x\w主被动雷达探测装置仿真试验工作状态交班的稳定控制,有效地提高了仿真系统的宽频段高精度仿真能力。
[0096]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0097]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
