1.本发明属于汽车制造领域;具体涉及一种基于加速工况的实车主动降噪方法及系统。
背景技术:
2.随着人们生活水平和生活质量的提高,人们愈发关注车辆乘坐舒适性及声学环境的静谧程度,甚至是车内声场的声品质控制和娱乐音的声场重放等等。而其中,发动机阶次噪声是传统燃油车车内噪声的主要来源之一。目前,汽车噪声控制方法主要分为被动噪声控制方法和主动噪声控制方法。被动噪声控制通过增加隔音材料等方法,对中高频噪声有较好的抑制效果,但是由于低频噪声的物理特性,被动控制方法对于低频噪声控制效果不佳。车内主动降噪即是噪声主动控制(active noise control)的一种应用场景,通过次级扬声器(一般是车门扬声器和重低音扬声器)发出与原始噪声频率相同、相位相差180
°
的次级声音信号,在误差麦克风处叠加从而在人耳处产生一“静谧区域”,达到降噪效果。由于系统本身物理特性,主动降噪方法对低频噪声控制效果较好,反而不易控制高频噪声,恰好是被动噪声控制方法的补充,并且不用增加额外的隔音材料,集成化程度高,符合轻量化的发展趋势,因此主动降噪技术在汽车上的研究应用越来越多。
3.学者们对平稳窄带噪声信号的主动控制做了较多的研究,其中较有代表性的方法是将基于fxlms算法的自适应陷波器应用于平稳窄带信号的主动控制。英国southampton大学的elliot和boucher等人针对基于fxlms算法的自适应陷波器,研究了多通道自适应前馈控制系统的特性表现。韩国仁川国立大学的young-sup lee等人通过理论和试验研究了不同长度的脉冲响应函数对主动噪声控制系统的影响。近年来,国内学者也越发关注对车内发动机噪声的主动控制,哈尔滨工业大学的刘剑以lms理论为分析基础,对基于fxlms算法的窄带anc系统进行了详细深入的性能分析。吉林大学孙吉东采用自适应陷波器算法作为自适应控制算法,基于数字信号处理器(dsp)设计开发了车内噪声自适应控制器原理样机,建立了单通道的车内噪声自适应控制系统,并在一辆自主品牌轿车上进行了变速器空挡、发动机不同转速下的车内低频峰值噪声主动控制试验。
4.基于自适应陷波器的主动降噪技术算法简便、计算量小,并且对发动机阶次噪声等窄带噪声有较好的控制效果,也是现在针对发动机阶次噪声应用最为广泛的主动噪声控制方法。目前,基于自适应陷波器的发动机噪声主动降噪系统相关研究,多数是讨论稳态工况下单通道、多通道主动降噪系统的降噪效果和系统稳定性,针对加速工况下主动降噪系统的系统调试和效果优化的研究相对较少。
技术实现要素:
5.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
6.为此,本发明的一个目的在于提出一种基于加速工况的实车主动降噪方法,该方法达到加速工况下主动降噪系统的系统调试和效果优化的目的。
7.本发明的第二个目的在于提出一种基于加速工况的实车主动降噪系统。
8.本发明的第三个目的在于提出一种计算机设备。
9.本发明的第四个目的在于提出一种非临时性计算机可读存储介质。
10.本发明通过以下技术方案实现:
11.一种基于加速工况的实车主动降噪方法,所述实车主动降噪方法包括以下步骤:
12.s01:在车内布置误差麦克风、次级扬声器、can转速信号与anc控制器;
13.s02:基于s01的车内布置,使anc控制器播放的扫频信号通过次级扬声器播放后再通过误差麦克风的采集再次传递给anc控制器;
14.s03:基于s02扫频信号和误差麦克风采集信号,采用滤波器长度为128 的fir滤波器,将输出的扫频信号与误差麦克风采集到的信号进行辨识得到次级通道传递函数;
15.s04:基于s02扫频信号和误差麦克风采集信号,采用滤波器长度为1024 的fir滤波器,将输出的扫频信号与误差麦克风采集到的信号进行辨识得到次级通道传递函数,用于计算收敛系数稳定性曲线;
16.s05:将s03得到的次级通道传递函数和s04得到的收敛系数稳定性曲线集成到fxlms算法程序中,执行降噪程序对车辆内的噪声进行降低。
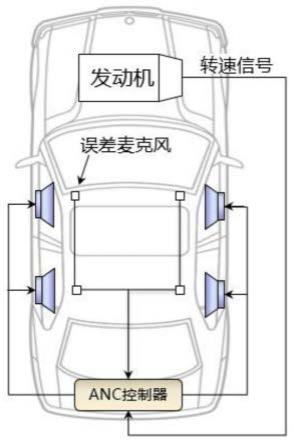
17.进一步的,所述s01具体为,将误差麦克风设置在车框上;将次级扬声器安放在车门内,将can转速信号连接在obd接口处,监测发动机转速;将anc控制器安装在车内。
18.进一步的,所述s02具体为,假设在多通道主动降噪系统中采用j个次级扬声器和k个误差麦克风,每个次级扬声器与每个误差麦克风之间都存在一条次级通道,整个系统的次级通道传函用hs(z)表示;
19.x(n)为根据转速信号形成的参考信号,表示系统的次级通道估计,共有j
×
k条次级通道,参考信号x(n)及其90
°
相移信号分别与次级通道估计卷积后得到滤波参考信号r0(n)、r1(n)即j
×
k维矩阵,即有:
[0020][0021]
多通道自适应陷波滤波系统中,滤波器权矢量w1和w2为两个j
×
1维向量,残余误差信号矢量e(n)为k
×
1维向量,y(n)为控制器输出的次级声音信号即j
×
1维向量,由fxlms算法得到两个自适应权重矢量的迭代公式为:
[0022][0023]
所以,得到控制器输出次级声音信号有:
[0024]
y(n)=x0(n)w0 x1(n)w
1 (3)。
[0025]
进一步的,所述s03将输出的扫频信号与误差麦克风采集到的信号进行辨识得到次级通道传递函数具体为,
[0026]
所述对次级通道进行辨识次级通道传递函数具体为,在次级通路辨识模型中,x(n)代表次级通路测试过程中的噪声激励,也就是控制器输出的激励信号;d(n)代表测试过程中控制器接收到的麦克风采集得到电压信号或声压信号;y(n)代表自适应滤波器输出,即噪声激励经过滤波器后的响应;e(n) 代表控制器接受到的电压信号与滤波器输出响应
叠加后的残余误差信号;在次级通路辨识过程中,自适应滤波器的权矢量根据lms算法不断进行更新迭代,使得残余误差信号e(n)不断逼近于0,也就是让滤波器输出响应y(n) 不断逼近于控制器接收到的电压信号;当系统收敛,残余误差信号接近于0 时,自适应滤波器权矢量系数即可以等效于次级通路脉冲响应函数。
[0027]
进一步的,所述s04计算收敛系数稳定性曲线具体为,假设有m个次级声源和l个误差麦克风,假设第l个误差信号在第n个谐波的复数成分记为e
l
(ωn),第 m个次级信号在这个谐波的复数成分记为wm(ωn),则误差信号为
[0028][0029]
其中d
l
(ωn)是初级声源造成的第l个复数误差信号,c
lm
(ωn)是第m个次级声源到第l个误差传感器在该频率下的复数响应,向量形式有
[0030]
e(ωn)=d(ωn) c(ωn)w(ωn) (5)
[0031]
其中
[0032]
e(ωn)=[e1(ωn),e2(ωn),...,e
l
(ωn)]
t
[0033]
d(ωn)=[d1(ωn),d2(ωn),...,d
l
(ωn)]
t
[0034]
w(ωn)=[w1(ωn),w2(ωn),...,wm(ωn)]
t
[0035][0036]
对于单频噪声来说目标函数写成
[0037]
j=ehae whbw (6)
[0038]
其中上标h代表向量或矩阵的埃尔米特转置;e和w分别代表l
×
1的复数误差信号和m
×
1的复数次级声音信号,a和b分别是l
×
l和m
×
m的正定加权矩阵;式(6)也可以写成未加权误差信号模数平方和加上加权次级信号模数平方和:
[0039]
j=ehe βwhw (7)
[0040]
结合式(5)目标函数可以写成变量w二次型的形式:
[0041]
j=dhd w
hch
d dhcw wh[chc βi]w (8)
[0042]
目标函数对于w实部(wr)和虚部(wi)的导数都是实数,所以可以定义复数梯度向量为:
[0043][0044]
由于g的实部虚部相互独立,让g=0设置j对于wr和wi的微分等于0,得到最优控制信号向量:
[0045]wopt
=-[chc βi]-1ch
d (10)
[0046]
结合式(5),复数梯度向量可写成:
[0047]
g=2[che βw] (11)
[0048]
以与梯度向量反比的方向调整复数次级信号的实部和虚部,得到最速下降算法:
[0049]
w(k 1)=(1-αβ)w(k)-αche(k) (12)
[0050]
其中,α表示收敛系数。结合式(5)和式(10)迭代公式(12)写成:
[0051]
(w(k 1)-w
opt
)=[i-α(chc βi)](w(k)-w
opt
) (13) 假设w(0)=0,重复应用式(13)得到
[0052]
w(k)-w
opt
=-[i-α(chc βi)]kw
opt (14)
[0053]
如果复数海塞矩阵写成复数酉矩阵的形式,标准化特征向量q和特征值对角矩阵,λ=diag(λ1,λ2,...,λm),其中特征值都是实数,所以
[0054]ch
c βi=qλq
h (15)
[0055]
定义控制系统的主坐标为
[0056]
v(k)=qh(w(k)-w
opt
) (16)
[0057]
所以式(14)写成
[0058]
v(k)=[1-αλ]kv(0) (17)
[0059]
因为λ是对角矩阵,控制系统主坐标的收敛是独立的,v(k)的第m个成分写成
[0060][0061]
其中上述方程有效时需要保证-1<1-αλm<1,得到基于收敛系数的稳定性条件:对于所有的m,0<α<2/λm。
[0062]
通过以上推导过程,结合式(15)和式(18)可以看到,在确定收敛系数α的值时,可通过次级通道传递函数矩阵计算收敛系数稳定性边界曲线。在汽车发动机转速变化时,阶次噪声频率也在变化,所以在该转速下满足系统稳定性的收敛系数限值也不同,即收敛系数稳定性边界值随发动机转速的变化而变化。
[0063]
进一步的,所述s05具体为,验证不同滤波器长度的fir滤波器辨识次级通道效果具体为,辨识次级通道用于算法集成时fir滤波器长度选择128;
[0064]
基于收敛系数稳定性边界曲线的频率分辨率与fir滤波器长度的选择有关。用于计算稳定性边界曲线的次级通道长度越长,相对应的,相同频率带宽范围内稳定性边界曲线的谱线越多,频率分辨率越精细,其关系可以写成:
[0065]
df=fs/length_of_fir (19)
[0066]
其中,df为稳定性边界曲线的频率分辨率,fs为次级通道辨识使用的采样率, length_of_fir为次级通道辨识采用的fir滤波器长度。与用于算法集成不同,计算收敛系数稳定性边界曲线所使用的次级通道不涉及算法运算量,相对来说,使用较长的滤波器长度对于提高稳定性边界曲线精确性具有较大帮助,滤波器长度如果较短会因为分辨率原因造成某些频率范围内系统不稳定的现象。本发明使用滤波器长度为1024的fir滤波器辨识次级通道用于计算收敛系数稳定性边界曲线;
[0067]
所以基于系统稳态误差,将曲线收敛系数变化曲线为稳定性边界曲线的 1/5。
[0068]
进一步的,所述降噪系统包括
[0069]
误差麦克风:用来采集误差信号并给到anc控制器进行算法计算;
[0070]
次级扬声器:anc控制器算运行得到输出信号经功放给到次级扬声器;
[0071]
can总线:采集发动机转速来构造主动降噪系统的参考信号;
[0072]
anc控制器:anc控制器用来执行fxlms算法程序。
[0073]
一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理
器执行所述计算机程序时实现上述任一项所述方法的步骤。
[0074]
一种非临时性计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的方法的步骤。
[0075]
本发明的有益效果是:
[0076]
通过次级通道传递函数矩阵计算收敛系数稳定性边界曲线(在保证系统稳定性前提下,收敛系数上限随频率的变化曲线),使得系统在发动机较宽转速范围内加速时同样能够达到良好的降噪效果,从而拓宽主动降噪系统的应用场景和范围。
[0077]
在进行次级通道辨识时辨识两次,分别采用两种不同的滤波器长度,用长度为128的fir滤波器辨识次级通道的结果用于系统算法集成,尽量降低算法计算量;
[0078]
用长度为1024的fir滤波器辨识次级通道的结果用于计算收敛系数稳定性边界曲线,使得计算出来的稳定性边界曲线在频率域上具备较高分辨率,避免加速工况下在某些发动机转速范围内出现系统发散的情况。
附图说明
[0079]
附图1是本发明主动降噪系统结构组成示意图。
[0080]
附图2是本发明多通道主动降噪系统次级通道框图。
[0081]
附图3是本发明多通道自适应陷波滤波原理框图。
[0082]
附图4是本发明次级通路辨识模型图。
[0083]
附图5是本发明长度分别为128和1024的fir滤波器辨识次级通道从而计算得到的收敛系数稳定性边界曲线图。
具体实施方式
[0084]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0085]
实施例1
[0086]
一种基于加速工况的实车主动降噪方法,所述实车主动降噪方法包括以下步骤:
[0087]
s01:在车内布置误差麦克风、次级扬声器、can转速信号与anc控制器;
[0088]
s02:基于s01的车内布置,使anc控制器播放的扫频信号通过次级扬声器播放后再通过误差麦克风的采集再次传递给anc控制器;
[0089]
s03:基于s02扫频信号和误差麦克风采集信号,采用滤波器长度为128 的fir滤波器,将输出的扫频信号与误差麦克风采集到的信号进行辨识得到次级通道传递函数;
[0090]
s04:基于s02扫频信号和误差麦克风采集信号,采用滤波器长度为1024 的fir滤波器,将输出的扫频信号与误差麦克风采集到的信号进行辨识得到次级通道传递函数,用于计算收敛系数稳定性曲线;
[0091]
s05:将s03得到的次级通道传递函数和s04得到的收敛系数稳定性曲线集成到fxlms算法程序中,执行降噪程序对车辆内的噪声进行降低。
[0092]
实施例2
[0093]
一种基于加速工况的实车主动降噪方法,所述s01具体为,将误差麦克风设置在车框上;将次级扬声器安放在车门内,将can转速信号连接在obd 接口处,监测发动机转速;将anc控制器安装在车内。
[0094]
实施例3
[0095]
一种基于加速工况的实车主动降噪方法,所述s02具体为,本发明提出主动降噪系统基于多通道自适应陷波器,即使用多个次级扬声器控制多个误差麦克风位置处的噪声水平,多通道主动降噪系统的次级通道框图如图2所示。假设在多通道主动降噪系统中采用j个次级扬声器和k个误差麦克风,每个次级扬声器与每个误差麦克风之间都存在一条次级通道,图2中hjk表示第j个次级扬声器到第k个误差传感器之间的次级通道,整个系统的次级通道传函用hs(z)表示;多通道自适应陷波滤波原理框图如图3所示。
[0096]
x(n)为根据转速信号形成的参考信号,表示系统的次级通道估计,共有j
×
k条次级通道,参考信号x(n)及其90
°
相移信号分别与次级通道估计卷积后得到滤波参考信号r0(n)、r1(n)即j
×
k维矩阵,即有:
[0097][0098]
多通道自适应陷波滤波系统中,滤波器权矢量w1和w2为两个j
×
1维向量,残余误差信号矢量e(n)为k
×
1维向量,y(n)为控制器输出的次级声音信号即j
×
1维向量,由fxlms算法得到两个自适应权重矢量的迭代公式为:
[0099][0100]
所以,得到控制器输出次级声音信号有:
[0101]
y(n)=x0(n)w0 x1(n)w
1 (3)。
[0102]
实施例4
[0103]
一种基于加速工况的实车主动降噪方法,所述s03将输出的扫频信号与误差麦克风采集到的信号进行辨识得到次级通道传递函数具体为,
[0104]
在主动降噪系统中需要考虑次级通道对控制系统的影响,因此需要对次级通路进行辨识。次级通路辨识模型如图4所示。在次级通路辨识模型中, x(n)代表次级通路测试过程中的噪声激励,也就是控制器输出的激励信号;
[0105]
d(n)代表测试过程中控制器接收到的麦克风采集得到电压信号或声压信号; y(n)代表自适应滤波器输出,即噪声激励经过滤波器后的响应;e(n)代表控制器接受到的电压信号与滤波器输出响应叠加后的残余误差信号;在次级通路辨识过程中,自适应滤波器的权矢量根据lms算法不断进行更新迭代,使得残余误差信号e(n)不断逼近于0,也就是让滤波器输出响应y(n)不断逼近于控制器接收到的电压信号;当系统收敛,残余误差信号接近于0时,自适应滤波器权矢量系数即可以等效于次级通路脉冲响应函数。
[0106]
实施例5
[0107]
一种基于加速工况的实车主动降噪方法,所述s04计算收敛系数稳定性曲线具体为,在实车主动降噪系统中,假设有m个次级声源和l个误差麦克风,接下来从频域角度对窄带谐波噪声的主动控制进行分析;假设第l个误差信号在第n个谐波的复数成分记为e
l
(ωn),第m个次级信号在这个谐波的复数成分记为 wm(ωn),则误差信号为
[0108][0109]
其中d
l
(ωn)是初级声源造成的第l个复数误差信号,c
lm
(ωn)是第m个次级声源到第l个误差传感器在该频率下的复数响应,向量形式有
[0110]
e(ωn)=d(ωn) c(ωn)w(ωn) (5)
[0111]
其中
[0112]
e(ωn)=[e1(ωn),e2(ωn),...,e
l
(ωn)]
t
[0113]
d(ωn)=[d1(ωn),d2(ωn),...,d
l
(ωn)]
t
[0114]
w(ωn)=[w1(ωn),w2(ωn),...,wm(ωn)]
t
[0115][0116]
对于单频噪声来说目标函数写成
[0117]
j=ehae whbw (6)
[0118]
其中上标h代表向量或矩阵的埃尔米特转置(共轭转置);e和w分别代表 l
×
1的复数误差信号和m
×
1的复数次级声音信号,a和b分别是l
×
l和m
×
m 的正定加权矩阵;式(6)也可以写成未加权误差信号模数平方和加上加权次级信号模数平方和:
[0119]
j=ehe βwhw (7)
[0120]
结合式(5)目标函数可以写成变量w二次型的形式:
[0121]
j=dhd w
hch
d dhcw wh[chc βi]w (8)
[0122]
目标函数对于w实部(wr)和虚部(wi)的导数都是实数,所以可以定义复数梯度向量为:
[0123][0124]
由于g的实部虚部相互独立,让g=0设置j对于wr和wi的微分等于0,得到最优控制信号向量:
[0125]wopt
=-[chc βi]-1ch
d (10)
[0126]
结合式(5),复数梯度向量可写成:
[0127]
g=2[che βw] (11)
[0128]
以与梯度向量反比的方向调整复数次级信号的实部和虚部,得到最速下降算法:
[0129]
w(k 1)=(1-αβ)w(k)-αche(k) (12)
[0130]
其中,α表示收敛系数。结合式(5)和式(10)迭代公式(12)写成:
[0131]
(w(k 1)-w
opt
)=[i-α(chc βi)](w(k)-w
opt
) (13) 假设w(0)=0,重复应用式(13)得到
[0132]
w(k)-w
opt
=-[i-α(chc βi)]kw
opt (14)
[0133]
如果复数海塞矩阵写成复数酉矩阵的形式,标准化特征向量q和特征值对角矩阵,
λ=diag(λ1,λ2,...,λm),其中特征值都是实数,所以
[0134]ch
c βi=qλq
h (15)
[0135]
定义控制系统的主坐标为
[0136]
v(k)=qh(w(k)-w
opt
) (16)
[0137]
所以式(14)写成
[0138]
v(k)=[1-αλ]kv(0) (17)
[0139]
因为λ是对角矩阵,控制系统主坐标的收敛是独立的,v(k)的第m个成分写成
[0140][0141]
其中上述方程有效时需要保证-1<1-αλm<1,得到基于收敛系数的稳定性条件:对于所有的m,0<α<2/λm。
[0142]
通过以上推导过程,结合式(15)和式(18)可以看到,在确定收敛系数α的值时,可通过次级通道传递函数矩阵计算收敛系数稳定性边界曲线。在汽车发动机转速变化时,阶次噪声频率也在变化,所以在该转速下满足系统稳定性的收敛系数限值也不同,即收敛系数稳定性边界值随发动机转速的变化而变化。
[0143]
实施例6
[0144]
一种基于加速工况的实车主动降噪方法,所述s05具体为,在算法调试运行前,次级通道辨识结果要集成到算法程序中对参考信号进行滤波处理,一般使用fir滤波器等效次级通道脉冲响应函数。在这种应用场景下,滤波器长度的选择要考虑到降噪效果、系统稳定性和算法运算量。理论上,滤波器阶数越高,次级通道辨识结果越准确,越能反映次级扬声器到误差麦克风的频率响应;但是,滤波器长度越长,算法运算量会不断增加,且当滤波器长度大于某一值时,再增加fir滤波器长度对降噪效果并没有明显的提升;为了兼顾算法运算量和辨识结果的准确性,辨识次级通道用于算法集成时fir滤波器长度选择 128;
[0145]
基于收敛系数稳定性边界曲线的频率分辨率(或者是随发动机转速变化的分辨率)与fir滤波器长度的选择有关。用于计算稳定性边界曲线的次级通道长度越长,相对应的,相同频率带宽范围内稳定性边界曲线的谱线越多,频率分辨率越精细,其关系可以写成:
[0146]
df=fs/length_of_fir (19)
[0147]
其中,df为稳定性边界曲线的频率分辨率,fs为次级通道辨识使用的采样率, length_of_fir为次级通道辨识采用的fir滤波器长度。与用于算法集成不同,计算收敛系数稳定性边界曲线所使用的次级通道不涉及算法运算量,相对来说,使用较长的滤波器长度对于提高稳定性边界曲线精确性具有较大帮助,滤波器长度如果较短会因为分辨率原因造成某些频率范围内系统不稳定的现象。本发明使用滤波器长度为1024的fir滤波器辨识次级通道用于计算收敛系数稳定性边界曲线;
[0148]
收敛系数的大小不仅影响主动降噪系统的收敛速度,还会影响系统收敛时的稳态误差,当收敛系数过大时,虽然收敛速度增快,但是相应的稳态误差会有所增大,一定程度影响降噪效果。所以基于系统稳态误差,本发明在集成频率-收敛系数曲线时,将曲线收敛系数变化曲线为稳定性边界曲线的1/5,兼顾系统收敛速度、降噪效果和稳态误差等因素。
[0149]
实施例7
[0150]
一种基于加速工况的实车主动降噪系统,所述降噪系统包括
[0151]
误差麦克风:用来采集误差信号并给到anc控制器进行算法计算;
[0152]
次级扬声器:anc控制器算运行得到输出信号经功放给到次级扬声器;采用四个车门扬声器作为次级扬声器,
[0153]
can总线:采集发动机转速来构造主动降噪系统的参考信号;
[0154]
anc控制器:anc控制器用来执行fxlms算法程序。
[0155]
实施例8
[0156]
一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述方法的步骤。
[0157]
实施例9
[0158]
一种非临时性计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的方法的步骤。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。