1.本实用新型属于白菜多项指标综合预测技术领域,具体为一种自动实现白菜多项指标的综合快速预测装置。
背景技术:
2.白菜指标预测时,需要对白菜的各种理化指标进行检测,其中光合色素包括叶绿素a、叶绿素b、总叶绿素、类胡萝卜素和相对叶绿素等。传统的白菜光合色素测量需要将叶片碾碎,浸泡药品,利用分光光度计进行测定相关理化指标在混合溶剂中的吸光度,相对叶绿素测量需要用spad仪器一点一点测量,降低预测装置的工作效率。
技术实现要素:
3.(一)解决的技术问题
4.为了克服现有技术的上述缺陷,本实用新型提供了一种自动实现白菜多项指标的综合快速预测装置,解决了传统的白菜各项指标测量需要将叶片碾碎,浸泡药品,利用分光光度计进行测定相关理化指标在混合溶剂中的吸光度,降低预测装置的工作效率的问题。
5.(二)技术方案
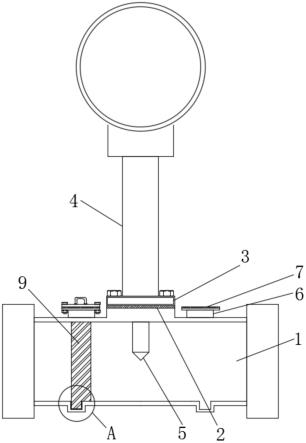
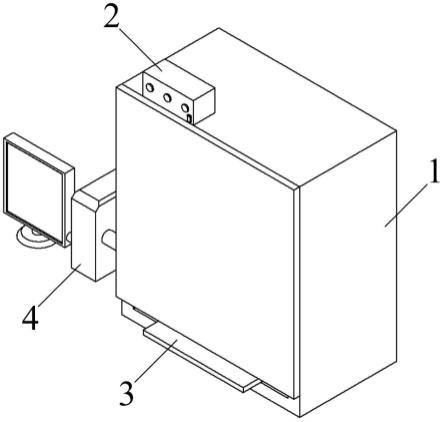
6.为实现上述目的,本实用新型提供如下技术方案:一种自动实现白菜多项指标的综合快速预测装置,包括实验箱、电源控制器、可抽拉载物台、主控机、相机和光源组件,所述电源控制器安装在实验箱的上方;所述可抽拉载物台设置在实验箱内部的下方;所述主控机安装在实验箱的外侧;所述相机安装在实验箱内部的上方;所述光源组件安装在相机的下方;
7.所述光源组件包括第一光源、第二光源和相机镜头,所述相机镜头安装在相机的下方;所述第二光源安装在相机镜头的外沿;所述第一光源安装在第二光源的外沿。
8.优选的,所述实验箱的前侧下端采用敞口式设置;所述电源控制器通过电源线与市电相连,且电源控制器用于调节第一光源和第二光源的光源强度;所述可抽拉载物台的前端贯穿至实验箱的前侧,且可抽拉载物台用于放置被测的白菜样本;所述主控机通过导线分别与电源控制器相连。
9.优选的,所述相机通过导线分别与电源控制器和主控机相连,且相机用于采集可见光和近红外四个通道的图像。
10.优选的,所述第一光源采用圆环形结构,且第一光源通过导线与电源控制器相连;所述第二光源通过导线与电源控制器相连,且第二光源采用圆环形结构;所述相机镜头为相机的摄像头。
11.(三)有益效果
12.与现有技术相比,本实用新型的有益效果在于:
13.1、本实用新型中,相机采用jai公司的ad-130ge四通道多光谱相机,利用的2-cdd四通道成像设备采集白菜的多光谱图像信息,相比采用传统的方式进行测量,具有无损性,
且提高预测装置的工作效率。
14.2、本实用新型中,实验箱前侧采用箱门进行封闭,避免外界自然光及灯光对检测结果的影响。
15.3、本实用新型中,利用此方法可以同时获取整株白菜的不同理化指标值,含叶绿素a、叶绿素b、总叶绿素、类胡萝卜素与相对叶绿素值,准确性高。
附图说明
16.图1为本实用新型的结构示意图;
17.图2为本实用新型的光源组件的结构示意图;
18.图3为本实用新型的实验箱内部的结构示意图;
19.图4为本实用新型的方法流程图。
20.图中:1实验箱、2电源控制器、3可抽拉载物台、4主控机、5相机、6光源组件、61第一光源、62第二光源、63相机镜头。
具体实施方式
21.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
22.如图1-4所示,本实用新型提供一种技术方案:一种自动实现白菜多项指标的综合快速预测,包括实验箱1、电源控制器2、可抽拉载物台3、主控机4、相机5和光源组件6,电源控制器2安装在实验箱1的上方;可抽拉载物台3设置在实验箱1内部的下方;主控机4安装在实验箱1的外侧;相机5安装在实验箱1内部的上方;光源组件6安装在相机5的下方;
23.本实施例中,光源组件6包括第一光源61、第二光源62和相机镜头63,相机镜头63安装在相机5的下方;第二光源62安装在相机镜头63的外沿;第一光源61安装在第二光源62的外沿第一光源61采用圆环形结构,且第一光源61通过导线与电源控制器2相连;第二光源62通过导线与电源控制器2相连,且第二光源62采用圆环形结构;相机镜头63为相机5的摄像头。
24.本实施例中,实验箱1的前侧下端采用敞口式设置;电源控制器2通过电源线与市电相连,且电源控制器2用于调节第一光源61和第二光源62的光源强度;可抽拉载物台3的前端贯穿至实验箱1的前侧,且可抽拉载物台3用于放置被测的白菜样本;主控机4通过导线分别与电源控制器2相连;相机5通过导线分别与电源控制器2和主控机4相连,且相机5用于采集可见光和近红外四个通道的图像。
25.一种自动实现白菜多项指标的综合快速预测方法,包括以下步骤:
26.步骤s101:利用相机5采集白菜处于幼苗期、莲座期、结球前期、结球中期、结球后期、收获期的多光谱图像信息,并获得各样本的理化指标与spad值;
27.步骤s102:利用可见光图像的g通道图像进行图像的灰度化、二值化等图像处理;
28.步骤s103:利用图像处理后的图像剔除白菜的叶脉部分,提取白菜的叶片部分图像信息;
29.步骤s104:将白菜叶片部分的可见光图像和近红外图像进行叠加,得到白菜叶片处于四个通道的多光谱图像;
30.步骤s105:处理后的白菜叶片多光谱图像进行图像的翻转等数据增强;
31.步骤s106:将翻转后的图像与逐个指标变量值对应,实现数据的扩增;
32.步骤s107:建立基于自搭建多光谱成像装置的白菜各指标预测的深度学习模型,最终实现同时全自动预测白菜多项指标。
33.本实施例中,步骤s101中,理化指标指光合色素,由于光合色素不溶于水但溶于有机溶剂,有机溶剂为采用无水乙醇和丙酮的混合溶液,其中无水乙醇和丙酮按照1:1进行混合,具体过程为使用打孔器在各样本处于同一节位主脉一侧打孔取样0.2g,将采集的0.2g样本置于干燥试管中,取10ml乙醇和丙酮的混合药品溶液,试验样本在该混合溶液中浸泡24h直至叶片变白,再利用分光光度计在663nm、645nm和440nm下比色测定吸光度,三个波段的吸光度分别为a663、a645、a440;四项理化指标的计算公式如下
34.叶绿素a=12.7
×
a663-2.69
×
a645)
×
v/w
×
1000);
35.叶绿素b=22.88
×
a645-4.67
×
a663)
×
v/w
×
1000);
36.总叶绿素=8.04
×
a663 20.69
×
a645)
×
v/w
×
1000);
37.类胡萝卜=[4.695
×
a440-0.268
×
(cho a cho b)]
×
v/(w
×
1000);
[0038]
其中v=10,w=0.2,cho a和cho b分别为叶绿素a和叶绿素b。
[0039]
本实施例中,步骤s107中,建立的深度学习模型架构如图a和b所示,由于试验数据量的限制,为避免过拟合情况的出现,同时为了适应输入端为所采集的四通道多光谱图像,采用自己手动搭建的浅层的cnn网络模型,该算法可以避免其他算法参数过多,运算时间长问题,提高模型的运算速度与准确度,经过模型的修改与模型的训练与验证,最终选取的整个模型一共23层,该模型由一个输入层、五个卷积层、与卷积层对应的五个激活层、与卷积层对应的五个池化层与一个全连接层组成,输入层为100
×
100像素的四通道图像,五个卷积层的卷积核大小与数量如表1所示,batch normalization层作为归一化层,将leaky relu激活函数作为激活层,池化层为最大池化层;
[0040]
[0041][0042]
卷积层卷积核大小卷积核数量第一层3
×
3512第二层3
×
3512第三层3
×
3256第四层3
×
3256第五层3
×
3128
[0043]
表1。
[0044]
本实施例中,步骤s107中,经过迭代次数、学习率等参数的调整,实现深度学习模型的建立,利用决定系数r2与均方根误差rmse对模型进行评判,两个参数的公式如下:
[0045][0046]
[0047]
最终结果:经过评判参数的对比选取最优的深度学习模型架构以实现对白菜各项指标的综合预测,其中各项被测指标模型的评判参数如表2所示;
[0048][0049]
表2。
[0050]
本实施例中,步骤s107中,最终利用进行白菜样本数据的采集,将所采集的数据输入自己搭建的深度学习模型,直接得到白菜多项指标的预测值,实现了端到端的快速测量方法,从样本的采集到样本五项指标的精准预测,该方法方便快捷,人工成本低,工作效率高,实现了快速无损的白菜叶片各指标的综合测定,为研究白菜的发育过程中叶绿素、类胡萝卜素等指标的变化提供可靠的信息,帮助研究者更快的监测白菜的生长状况。
[0051]
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
[0052]
上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。