1.本实用新型涉及防腐修复设备技术领域,具体为一种用于海工码头的无人化防腐修复设备。
背景技术:
2.港口是水陆交通的集结点和枢纽,工农业产品和外贸进出口物资的集散地,船舶停泊、装卸货物、上下旅客、补充给养的场所,而海工码头是港口最重要的组成部分,供船舶停靠、货物装卸和旅客上下用的水工建筑物,在海工码头所使用的设备因为靠近海边,空气中湿度大,所以常常会在设备的表面喷涂一层防腐蚀油漆,提高设备的使用效果。
3.但随着海工码头上设备的使用,常常出现磕碰现象,容易使设备表面的防护油漆出现损伤,需要及时进行修复,常用的修复方式是人工使用喷漆设备对物体表面进行重新喷漆。
4.但人工喷漆需要时间长,需要额外增大劳动力的投入,即使一些设备可以自动对物体表面进行喷漆修复,但喷漆过程中油漆容易粘连在检测部件上,影响整体装置的正常使用,需要频繁的进行清理,为此,我们提出一种用于海工码头的无人化防腐修复设备。
技术实现要素:
5.本实用新型要解决的技术问题是克服现有的缺陷,提供一种用于海工码头的无人化防腐修复设备,可以自动对物体表面进行喷漆修复,减少人工的参与,减少摄像头的清洁次数,保证摄像部件的正常使用,可以有效解决背景技术中的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种用于海工码头的无人化防腐修复设备,包括支撑框架、调节机构和拍摄机构;
7.支撑框架:其前后内壁均设有横向滑槽,两个横向滑槽的内部之间横向滑动连接有横向框板,横向滑槽的左右内壁之间均通过轴承一转动连接有横向螺杆,横向螺杆分别与横向框板前后两端的螺纹孔螺纹连接,支撑框架的左右内壁均设有纵向滑槽,两个纵向滑槽的内部之间纵向滑动连接有纵向框板,纵向滑槽的前后内壁之间均通过轴承二转动连接有纵向螺杆,纵向螺杆分别与纵向框板前后两端的螺纹孔螺纹连接;
8.调节机构:位于纵向框板和横向框板的交叉处,纵向框板和横向框板均与调节机构滑动连接,调节机构的下端设有进料孔,进料孔的内部右端设有喷头;
9.拍摄机构:设置于调节机构的下端,减少摄像头的清洁次数,保证摄像部件的正常使用,根据物体表面的受损情况,自动对物体表面进行喷漆修复,提高物体的防腐蚀效果,对物体进行全方面的修复,避免出现物体角落处修复不到位的情况,减少人工的参与,实现无人化的修复过程。
10.进一步的,所述支撑框架的前表面设有单片机,单片机的输入端电连接于外部电源,控制整体装置的启动与停止。
11.进一步的,所述调节机构包括限位板和调节板,所述调节板位于纵向框板和横向
框板的交叉处,纵向框板和横向框板均与调节板滑动连接,调节板的上端对称设有限位板,上侧的限位板下表面与横向框板的上表面贴合,下侧的限位板上表面与纵向框板的下表面贴合,方便对修复部件的位置进行调节。
12.进一步的,所述调节机构还包括电动推杆、安装筒、旋转电机和板体,所述电动推杆设置于调节板中部的安装孔内,电动推杆的伸缩端下端设有安装筒,安装筒的内部设有旋转电机,旋转电机的输出轴下端设有板体,板体的内部设有进料孔,旋转电机和电动推杆输入端均电连接于单片机的输出端,对修复部件的上下位置和角度进行调节。
13.进一步的,所述拍摄机构包括摄像头、防护筒、气孔、分流孔和进气孔,所述进气孔设置于板体的内部,进气孔的前端设有分流孔,防护筒设置于板体的前表面,防护筒的内部设有摄像头,防护筒的内部环形分布有气孔,气孔均与分流孔相连通,摄像头的输出端电连接于单片机的输入端,对物体的表面情况进行拍摄。
14.进一步的,所述板体的后侧面和左侧面均设有管道,后侧的管道与进料孔相连通,左侧的管道与进气孔相连通,管道的中部均串联有电磁阀,电磁阀的输入端均电连接于单片机的输出端,控制防腐蚀涂料和空气的流通。
15.进一步的,所述支撑框架的前表面对称设有第一电机,第一电机的输出轴后端分别穿过支撑框架前端的圆孔并与相邻的纵向螺杆固定连接,支撑框架的右侧面对称设有第二电机,第二电机的输出轴左端分别穿过支撑框架右端的圆孔并与相邻的横向螺杆固定连接,第一电机和第二电机的输入端均电连接于单片机的输出端,位修复部件的移动提供动力。
16.进一步的,所述板体的前表面设有测距传感器,测距传感器的输出端电连接于单片机的输入端,对板体与物体之间的间距进行检测。
17.与现有技术相比,本实用新型的有益效果是:本用于海工码头的无人化防腐修复设备,具有以下好处:
18.1、在使用时,通过测距传感器对板体和物体之间的距离进行检测,并通过摄像头对物体的表面进行拍摄,然后根据测距传感器和摄像头检测的数据,判断物体表面是否需要进行喷漆修复,当需要喷漆修复时,启动旋转电机,旋转电机的输出轴带动板体进行旋转,对板体的角度进行调节,使喷头朝向物体,通过单片机控制电磁阀打开,外部处于高压状态的防腐蚀油漆将通过喷头喷涂至物体表面,同时在喷涂过程中,外部处于高压状态下的空气将通过进气孔进入分流孔内,并通过气孔从摄像头的前表面处喷出,阻挡飞溅的油漆粘连在摄像头表面,减少摄像头的清洁次数,保证摄像部件的正常使用,根据物体表面的受损情况,可以自动对物体表面进行喷漆修复,提高物体的防腐蚀效果。
19.2、通过单片机启动第一电机,第一电机的输出轴带动纵向螺杆进行转动,因为纵向框板在纵向滑槽内纵向滑动连接,通过纵向框板与纵向螺杆的螺纹连接,使纵向框板进行前后移动,对板体的前后位置进行调节,同理启动第二电机,对板体的左右位置进行调节,启动电动推杆,对电动推杆的伸缩端带动安装筒上下移动,对板体的上下位置进行调节,对板体的位置进行移动,对物体进行全方面的修复,避免出现物体角落处修复不到位的情况,减少人工的参与,实现无人化的修复过程。
附图说明
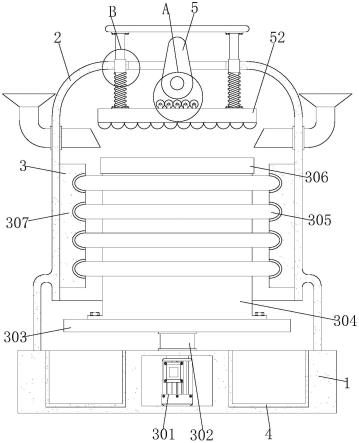
20.图1为本实用新型结构示意图;
21.图2为本实用新型调节机构结构示意图;
22.图3为本实用新型板体内部俯视结构示意图;
23.图4为本实用新型a处放大结构示意图。
24.图中:1支撑框架、2横向滑槽、3横向框板、4横向螺杆、5纵向滑槽、6纵向框板、7纵向螺杆、8调节机构、81限位板、82调节板、83电动推杆、84安装筒、85旋转电机、86板体、9拍摄机构、91摄像头、92防护筒、93气孔、94分流孔、95进气孔、10单片机、11测距传感器、12电磁阀、13第一电机、14第二电机、15喷头、16进料孔、17管道。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1-4,本实施例提供一种技术方案:一种用于海工码头的无人化防腐修复设备,包括支撑框架1、调节机构8和拍摄机构9;
27.支撑框架1:其前后内壁均设有横向滑槽2,两个横向滑槽2的内部之间横向滑动连接有横向框板3,横向滑槽2的左右内壁之间均通过轴承一转动连接有横向螺杆4,横向螺杆4分别与横向框板3前后两端的螺纹孔螺纹连接,通过横向螺杆4的转动带动横向框板3在横向滑槽2内左右移动,对修复部件的左右位置进行调节,支撑框架1的左右内壁均设有纵向滑槽5,两个纵向滑槽5的内部之间纵向滑动连接有纵向框板6,纵向滑槽5的前后内壁之间均通过轴承二转动连接有纵向螺杆7,纵向螺杆7分别与纵向框板6前后两端的螺纹孔螺纹连接,通过纵向螺杆7的转动带动纵向框板6在纵向滑槽5内前后移动,对修复部件的前后位置进行调节,支撑框架1的前表面设有单片机10,单片机10的输入端电连接于外部电源,支撑框架1的前表面对称设有第一电机13,第一电机13的输出轴后端分别穿过支撑框架1前端的圆孔并与相邻的纵向螺杆7固定连接,支撑框架1的右侧面对称设有第二电机14,第二电机14的输出轴左端分别穿过支撑框架1右端的圆孔并与相邻的横向螺杆4固定连接,第一电机13和第二电机14的输入端均电连接于单片机10的输出端,为纵向螺杆7和横向螺杆4的旋转提供动力;
28.调节机构8:位于纵向框板6和横向框板3的交叉处,纵向框板6和横向框板3均与调节机构8滑动连接,调节机构8的下端设有进料孔16,进料孔16的内部右端设有喷头15,调节机构8包括限位板81和调节板82,调节板82位于纵向框板6和横向框板3的交叉处,纵向框板6和横向框板3均与调节板82滑动连接,调节板82的上端对称设有限位板81,上侧的限位板81下表面与横向框板3的上表面贴合,下侧的限位板81上表面与纵向框板6的下表面贴合,调节机构8还包括电动推杆83、安装筒84、旋转电机85和板体86,电动推杆83设置于调节板82中部的安装孔内,电动推杆83的伸缩端下端设有安装筒84,安装筒84的内部设有旋转电机85,旋转电机85的输出轴下端设有板体86,板体86的内部设有进料孔16,旋转电机85和电动推杆83输入端均电连接于单片机10的输出端,启动旋转电机85,旋转电机85的输出轴带
动板体86进行旋转,对板体86的角度进行调节,启动电动推杆83,对电动推杆83的伸缩端带动安装筒84上下移动,对板体86的上下位置进行调节,板体86的前表面设有测距传感器11,测距传感器11的输出端电连接于单片机10的输入端,对板体86和物体之间的距离进行检测;
29.拍摄机构9:设置于调节机构8的下端,拍摄机构9包括摄像头91、防护筒92、气孔93、分流孔94和进气孔95,进气孔95设置于板体86的内部,进气孔95的前端设有分流孔94,防护筒92设置于板体86的前表面,防护筒92的内部设有摄像头91,防护筒92的内部环形分布有气孔93,气孔93均与分流孔94相连通,摄像头91的输出端电连接于单片机10的输入端,板体86的后侧面和左侧面均设有管道17,后侧的管道17与进料孔16相连通,左侧的管道17与进气孔95相连通,管道17的中部均串联有电磁阀12,电磁阀12的输入端均电连接于单片机10的输出端,通过摄像头91对物体的表面进行拍摄,判断物体表面是否需要进行喷漆修复,当需要喷漆修复时,旋转板体86,使喷头15朝向物体,通过单片机10控制电磁阀12打开,外部处于高压状态的防腐蚀油漆将通过喷头15喷涂至物体表面,同时在喷涂过程中,外部处于高压状态下的空气将通过进气孔95进入分流孔94内,并通过气孔93从摄像头91的前表面处喷出,阻挡飞溅的油漆粘连在摄像头91表面,减少摄像头91的清洁次数,方便对整体装置的使用。
30.本实用新型提供的一种用于海工码头的无人化防腐修复设备的工作原理如下:在使用时,通过测距传感器11对板体86和物体之间的距离进行检测,并通过摄像头91对物体的表面进行拍摄,然后根据测距传感器11和摄像头91检测的数据,判断物体表面是否需要进行喷漆修复,当需要喷漆修复时,启动旋转电机85,旋转电机85的输出轴带动板体86进行旋转,对板体86的角度进行调节,使喷头15朝向物体,通过单片机10控制电磁阀12打开,外部处于高压状态的防腐蚀油漆将通过喷头15喷涂至物体表面,同时在喷涂过程中,外部处于高压状态下的空气将通过进气孔95进入分流孔94内,并通过气孔93从摄像头91的前表面处喷出,阻挡飞溅的油漆粘连在摄像头91表面,减少摄像头91的清洁次数,然后通过单片机10启动第一电机13,第一电机13的输出轴带动纵向螺杆7进行转动,因为纵向框板6在纵向滑槽5内纵向滑动连接,通过纵向框板6与纵向螺杆7的螺纹连接,使纵向框板6进行前后移动,对板体86的前后位置进行调节,同理启动第二电机14,对板体86的左右位置进行调节,启动电动推杆83,对电动推杆83的伸缩端带动安装筒84上下移动,对板体86的上下位置进行调节,对板体86的位置进行移动,对物体进行全方面的修复。
31.值得注意的是,以上实施例中所公开的单片机10可选用pic16f1823-i/p型号的单片机,旋转电机85、电动推杆83、摄像头91、电磁阀12、第一电机13、第二电机14和测距传感器11则可根据实际应用场景自由配置,旋转电机85、第一电机13和第二电机14均可选用5ik40rgu-cf型号的电机,电动推杆83可选用ant-52型号的电动推杆,摄像头91可选用kn-hp857-4d型号的高清摄像头,电磁阀12可选用yca21-25型号的电磁阀,测距传感器11可选用t150hjg-cgq型号的反射型激光测距传感器,单片机10控制旋转电机85、电动推杆83、摄像头91、电磁阀12、第一电机13、第二电机14和测距传感器11工作采用现有技术中常用的方法。
32.以上仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它
相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。