1.本实用新型涉及无人机技术领域,具体涉及一种船用无人机起降平台。
背景技术:
2.随着无人机技术的发展,无人机的应用范围越来越广,无人机广泛应用于航拍、农药喷洒、观测、观赏娱乐等等,无人机的升降需要在一个相对水平的平面上进行,在陆地上,平面较多,无人机很容易平稳升降,但在一个湖面或河面的一些舰艇上,水的波动较大,无人机的升降对舰艇的升降平台要求较高,目前调节艇载无人机起降平台平衡装置数量过少且技术简单的前提条件之下,目前艇载无人机的起降平台大多没有控制其平衡的调节装置,大多只能在平静的水面回收无人机,因此需要一种简单的可调节平衡的无人机起降平台。
技术实现要素:
3.本实用新型的目的是针对现有技术存在的不足,提供一种船用无人机起降平台。
4.为实现上述目的,本实用新型提供了一种船用无人机起降平台,包括底座、中支柱、调节杆、平台和调节机构,所述中支柱下端与底座固定连接,且其上端设有与平台的中心活动连接的球形关节,所述调节机构设置在底座内部的空腔中,所述调节杆下部伸入底座中并与底座滑动连接,调节杆的上端与平台活动连接,所述调节机构与调节杆传动连接,所述底座内还设有控制器和水平仪,所述水平仪、调节机构分别与控制器连接。
5.进一步的,所述调节机构包括电机、主动齿轮和从动齿轮,所述电机通过固定座与底座固定连接,所述主动齿轮中部固定有第一传动轴,所述第一传动轴一端与电机输出轴固定连接另一端与底座可转动连接,所述从动齿轮中部固定有第二传动轴,所述第二传动轴两端均与底座可转动连接,所述主动齿轮和从动齿轮均为固定成一体且同轴心的大齿轮和小齿轮,所述大齿轮分别与调节杆下部的卡齿条啮合,所述小齿轮之间通过同步带传动连接,使得主动齿轮和从动齿轮同步转动,所述电机与控制器连接。
6.进一步的,所述调节杆包括第一主动调节杆、第二主动调节杆、第一从动调节杆和第二从动调节杆,所述第一主动调节杆和第一从动调节杆、第二主动调节杆和第二从动调节杆分别关于中支柱的竖直中心线对称分布,并分别位于平台下端面四周的每边的中间位置,所述第一主动调节杆和第一从动调节杆长度相同,第二主动调节杆和第二从动调节杆长度相同,所述第一主动调节杆长度与第二主动调节杆长度相比较短。
7.进一步的,所述调节机构数量为两组,分别设置在底座内部一上一下两个空腔中,上侧的调节机构分别与第一主动调节杆和第一从动调节杆传动连接,下侧的调节机构分别与第二主动调节杆和第二从动调节杆传动连接。
8.进一步的,所述水平仪为单轴电子水平仪,且其数量为两个,分别固定在底座内部一上一下两个空腔中,且位于底座的竖直中心线与空腔相交的位置。
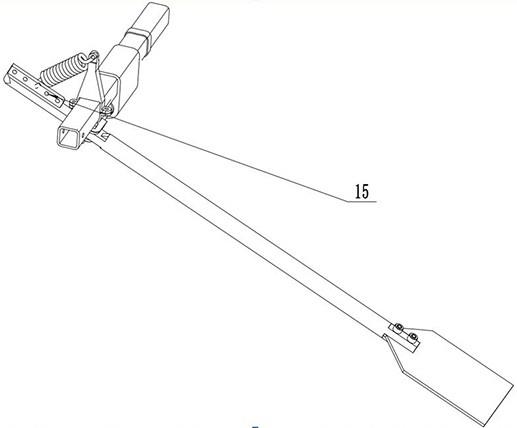
9.进一步的,所述调节杆上部一体设有球形端,所述平台上设有与球形端配合的滑
槽。
10.进一步的,所述电机为步进电机。
11.有益效果:本实用新型设置水平仪检测倾斜程度,并将信号传输给控制器,通过控制器对调节机构进行控制,带动调节杆动作,维持平台的平衡;调节机构与调节杆之间利用齿轮传动,使得调节更加精确,对侧的两个调节杆上下移动方向相反,距离相同,使得平台调节更稳定;本实用新型结构简单,调节稳定且精确,能很好的维持平台的稳定,便于船用无人机的起降。
附图说明
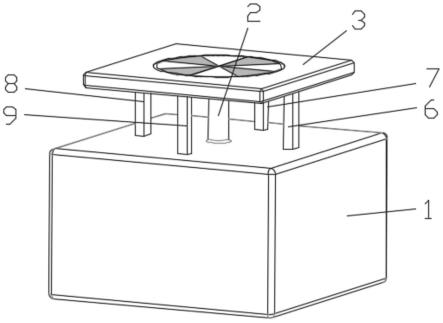
12.图1是本实用新型实施例的船用无人机起降平台的结构示意图;
13.图2是本实用新型实施例的船用无人机起降平台的内部结构示意图;
14.图3是本实用新型实施例的图2中a区放大图;
15.图4是本实用新型实施例的图2中b区放大图。
16.图中:1、底座;2、中支柱;3、平台;4、球形关节;5、水平仪;6、第一主动调节杆;7、第二主动调节杆;8、第一从动调节杆;9、第二从动调节杆;10、电机;11、主动齿轮;12、从动齿轮;13、同步带;14、卡齿条;15、滑槽;16、固定座。
具体实施方式
17.下面结合附图和具体实施例,进一步阐明本实用新型,本实施例在以本实用新型技术方案为前提下进行实施,应理解这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。
18.如图1至4所示,本实用新型实施例提供了一种船用无人机起降平台,包括底座1、中支柱2、调节杆、平台3和调节机构,底座1内设有控制器以及与控制器电性连接的水平仪5,中支柱2下端与底座1固定连接,且其上端设有与平台3的中心活动连接的球形关节4,调节机构设置在底座1内部的空腔中,调节杆下部伸入底座1中并与底座1滑动连接,底座1上有与调节杆配合的导向槽,在导向槽的导向作用下,调节杆做相对底座1垂直的上下移动动作。调节杆的上端与平台3活动连接,具体在调节杆的上部一体设有球形端,平台3上设有与球形端配合的滑槽15,调节机构与调节杆传动连接。具体的,调节机构包括电机10、主动齿轮11和从动齿轮12,电机10为步进电机,且电机10与控制器电性连接,电机10通过固定座16与底座1固定连接,主动齿轮11中部固定有第一传动轴,第一传动轴一端与电机10输出轴固定连接另一端与底座1可转动连接,从动齿轮12中部固定有第二传动轴,第二传动轴两端均与底座1可转动连接,主动齿轮11和从动齿轮12均为固定成一体且同轴心的大齿轮和小齿轮,大齿轮分别与调节杆下部的卡齿条14啮合,小齿轮之间通过同步带13传动连接,使得主动齿轮11和从动齿轮12同步转动。
19.调节杆包括第一主动调节杆6、第二主动调节杆7、第一从动调节杆8和第二从动调节杆9,第一主动调节杆6和第一从动调节杆8、第二主动调节杆7和第二从动调节杆9分别关于中支柱2的竖直中心线对称分布,并分别位于平台3下端面四周的每边的中间位置,即平台3每边都有一个调节杆。调节机构数量为两组,分别设置在底座1内部一上一下两个空腔中,上侧的调节机构分别与第一主动调节杆6和第一从动调节杆8传动连接,下侧的调节机
构分别与第二主动调节杆7和第二从动调节杆9传动连接,故而第一主动调节杆6和第一从动调节杆8长度相同,第二主动调节杆7和第二从动调节杆9长度相同,且第一主动调节杆长度6与第二主动调节杆7长度相比长度较短。同一空腔内的主动齿轮11和从动齿轮12与两个调节杆啮合的两侧为对侧,即在主动齿轮11和从动齿轮12转向相同的时候,与两者相啮合的两个调节杆上下移动方向相反。
20.水平仪5为单轴电子水平仪,且其数量为两个,分别固定在底座1内部一上一下两个空腔中,且位于底座1的竖直中心线与空腔相交的位置,两个水平仪5检测的方向相互垂直,以图2所示方向为例,上侧空腔内的水平仪5检测左右的倾斜角,下侧空腔内的水平仪5检测前后的倾斜角,两个水平仪5将检测到的电信号传输给控制器。在其他的实施例中水平仪5也可使用双轴电子水平仪,使用双轴电子水平仪只需要设置一个水平仪5。
21.在使用时,将无人机起降平台的底座1固定在船上,当船受水浪倾斜时,起降平台中的水平仪5将检测出的倾斜信号传输给控制器,控制器根据收到的信号对两个调节机构的电机10分别进行控制,带动各个调节杆动作,中支柱2固定不动,而对边的调节杆发生上下移动,使得平台3相对底座1的倾斜度发生改变,最终使平台3水平。
22.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,其它未具体描述的部分,属于现有技术或公知常识。在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。