一种pc墙板可平动微调安装设备
技术领域
1.本实用新型涉及装配式建筑装备领域,特别是一种pc墙板可平动微调安装设备。
背景技术:
2.装配式建筑作为建筑领域的新型产业,可以大量标准化生产,具有质量可靠、节能环保、施工强度低、可重复利用等多方面优点,广泛应用于现代建筑行业。pc墙板作为装配式建筑中重要的组成部分,可实现建筑的快速搭建或空间分离,其生产成本低、运输便利、易于组装,可满足多种建筑要求。长期以来,pc墙板常采用人工组装或塔吊吊装等安装形式,但在实际作业中,人工组装效率低、施工强度大,且存在安全隐患;塔吊吊装受施工地理环境影响较大,并且不适用于装配式建筑“后安装法”安装工艺。面对诸多问题,如何设计一种pc墙板可平动微调安装设备,通过简单的机械结构,实现pc墙板的安全快速安装,已成为本行业内亟需解决的工程问题。
技术实现要素:
3.本实用新型的目的是提供一种pc墙板可平动微调安装设备,一方面通过简单的执行机构,调节墙板安装位姿,解决传统装配式建筑墙板安装方式弊端,实现pc墙板机械化安装;另一方面通过采用简单的平面连杆机构,增加抓取机构提升高度,以较低的成本,实现多规格pc墙板可控位姿安装。
4.本实用新型通过以下技术方案达到上述目的:
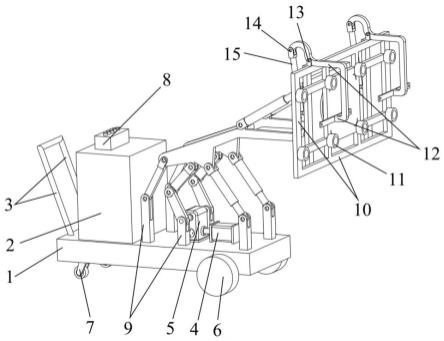
5.一种pc墙板可平动微调安装设备包括车架,所述车架上方设置有动力箱、固定手柄、驱动装置、三自由度支撑板位姿调节机构。所述三自由度支撑板位姿调节机构包括机架、第一主动杆、第一连杆、第一连架杆、动臂、第一液压缸、第二液压缸、支撑板,所述支撑板通过第一转动副与抓取机构连接。
6.所述动力箱内至少设置有配重块、可充电电源、油泵,所述动力箱外设置有控制台;所述驱动装置包括电机、减速机、半轴,所述电机安装在减速机动力输入端,所述减速机为单输入双输出减速机,两端通过半轴与三自由度支撑板位姿调节机构连接。所述车架下方设置有行走轮,所述行走轮包括前行走轮和后行走轮,所述后行走轮为万向轮;施工人员通过推拉固定手柄以控制本技术整体行进方向。
7.所述三自由支撑板位姿调节机构中,机架固定安装在车架上方;所述动臂包括第十四转动副、第二转动副、第三转动副、第四转动副、第五转动副,所述动臂通过第十四转动副与第一连架杆一端铰接,所述第一连架杆另一端通过第六转动副与机架后端铰接;所述动臂通过第二转动副与第一连杆一端铰接,所述第一连杆另一端通过第七转动副与第一主动杆一端铰接,所述第一主动杆另一端通过第八转动副与机架中部铰接;所述动臂通过第三转动副与第一液压缸一端铰接,所述第一液压缸另一端通过第九转动副与机架前端铰接;所述动臂通过第四转动副与第二液压缸一端铰接,所述第二液压缸另一端通过第十转动副与支撑板上端铰接,所述支撑板下端通过第五转动副与动臂铰接。为提高负载能力,所
述三自由度支撑板位姿调节机构还包括第二连架杆、第二主动杆、第二连杆、第三液压缸、第四液压缸,所述第二连架杆、第二主动杆、第二连杆、第三液压缸、第四液压缸装配连接方式分别与第一连架杆、第一主动杆、第一连杆、第一液压缸、第二液压缸装配连接方式相同。所述三自由度支撑板位姿调节机构在电机、第一液压缸、第二液压缸、第三液压缸、第四液压缸共同驱动下可实现支撑板板面垂直于地面纵向平动以及平行于地面的横向平动,实现pc墙板安装过程中的姿态微调。
8.所述支撑板通过第一转动副与抓取机构连接,所述第一转动副可实现抓取机构相对支撑板任意角度转动调节。
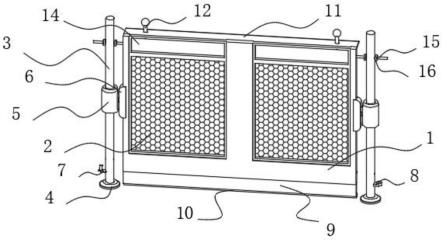
9.所述抓取机构为平面四杆单自由度连杆机构,包括板架、第五液压缸、下压臂。所述板架正面设置有多个阵列分布的真空吸附装置,所述真空吸附装置用于吸附墙板;所述板架背面通过第十一转动副与第五液压缸一端铰接,所述第五液压缸另一端通过第十二转动副与下压臂一端铰接,所述下压臂通过第十三转动副铰接于板架上端。所述抓取机构在第五液压缸驱动下可实现墙板的夹持或释放。
10.与现有技术相比,本实用新型的突出优点在于:
11.(1)本实用新型通过三自由支撑板位姿调节机构和抓取机构设计,以较低的成本,可实现pc墙板机械化安装,解决了墙板塔吊吊装环境受限问题,实现了墙板高效安装;
12.(2)本实用新型通过三自由度支撑板调节机构和抓取机构配合,可实现pc墙板姿态平动调整及安装,解决了传统人工调节墙板安装位姿弊端,减轻了劳动强度,提高了安全系数,相比现有由叉车改装而成的墙板安装设备,采用平面连杆机构,相连构件之间通过转动副铰接,具有更大的运动空间和更低的制造成本,实现了多种规格pc墙板安装。
附图说明
13.图1为本实用新型所述一种pc墙板可平动微调安装设备结构示意图之一。
14.图2为本实用新型所述一种pc墙板可平动微调安装设备结构示意图之二。
15.图3为本实用新型所述一种pc墙板可平动微调安装设备结构示意图之三。
16.图4为本实用新型所述一种pc墙板可平动微调安装设备墙板抓取作业示意图。
17.图5为本实用新型所述一种pc墙板可平动微调安装设备墙板立板作业示意图。
18.图6为本实用新型所述一种pc墙板可平动微调安装设备墙板纵装施工示意图。
19.图7为本实用新型所述一种pc墙板可平动微调安装设备墙板横装施工示意图。
具体实施方式
20.对照图1、图2、图3,一种pc墙板可平动微调安装设备包括车架1,所述车架1上方设置有三自由度支撑板位姿调节机构,所述三自由支撑板位姿调节机构为平面十杆三自由度连杆机构,包括机架9、第一主动杆20、第一连杆22、第一连架杆17、动臂24、第一液压缸26、第二液压缸29、支撑板33,所述支撑板33通过第一转动副40与抓取机构连接。
21.对照图1、图3,所述车架1上方设置有动力箱2、固定手柄3、驱动装置、三自由度支撑板位姿调节机构。所述动力箱2内至少设置有配重块、可充电电源、油泵,所述动力箱2外设置有控制台8;所述驱动装置包括电机4、减速机5、半轴39,所述电机4安装在减速机5动力输入端,所述减速机5为单输入双输出减速机,两端通过半轴39与三自由度支撑板位姿调节
机构连接。所述车架1下方设置有行走轮,所述行走轮包括前行走轮6和后行走轮7,所述后行走轮7为万向轮;施工人员通过推拉固定手柄3以控制本技术整体行进方向。
22.对照图1、图2、图3,所述三自由支撑板位姿调节机构为平面十杆三自由度连杆机构,机架9固定安装在车架1上方;所述动臂24包括第十四转动副18、第二转动副23、第三转动副25、第四转动副28、第五转动副31,所述动臂24通过第十四转动副18与第一连架杆17一端铰接,所述第一连架杆17另一端通过第六转动副16与机架9后端铰接;所述动臂24通过第二转动副23与第一连杆22一端铰接,所述第一连杆22另一端通过第七转动副21与第一主动杆20一端铰接,所述第一主动杆20另一端通过第八转动副19与机架9中部铰接;所述动臂24通过第三转动副25与第一液压缸26一端铰接,所述第一液压缸26另一端通过第九转动副27与机架9前端铰接;所述动臂24通过第四转动副28与第二液压缸29一端铰接,所述第二液压缸29另一端通过第十转动副30与支撑板33上端铰接,所述支撑板33下端通过第五转动副31与动臂24铰接。为提高负载能力,所述三自由度支撑板位姿调节机构还包括第二连架杆34、第二主动杆35、第二连杆36、第三液压缸37、第四液压缸38,所述第二连架杆34、第二主动杆35、第二连杆36、第三液压缸37、第四液压缸38装配连接方式分别与第一连架杆17、第一主动杆20、第一连杆22、第一液压缸26、第二液压缸29装配连接方式相同。所述三自由度支撑板位姿调节机构在电机4、第一液压缸26、第二液压缸29、第三液压缸37、第四液压缸38共同驱动下可实现支撑板33板面垂直于地面纵向运动以及横向平动,实现pc墙板安装过程中的姿态微调。
23.对照图3,所述支撑板33通过第一转动副40与抓取机构连接,所述第一转动副40可实现抓取机构相对支撑板33任意角度转动调节。
24.对照图1、图2,所述抓取机构为平面四杆单自由度连杆机构,包括板架10、第五液压缸15、下压臂12。所述板架10正面设置有多个阵列分布的真空吸附装置11,所述真空吸附装置11用于吸附墙板;所述板架10背面通过第十一转动副32与第五液压缸15一端铰接,所述第五液压缸15另一端通过第十二转动副14与下压臂12一端铰接,所述下压臂12通过第十三转动副13铰接于板架10上端。所述抓取机构在第五液压缸15驱动下可实现墙板的夹持或释放。
25.对照图1、图2、图3,所述第一、二、三、四、五液压缸动力由油泵提供,所述油泵、电机4、第一转动副40为主动副,驱动第一转动副40转动的电能由可充电电源提供,所述操作台8用于控制本技术整体运动位姿。
26.对照图1、图2、图3,所述三自由度支撑板调节机构在电机4、第一液压缸26、第二液压缸29、第三液压缸37、第四液压缸38协同驱动下,受控耦合运动,实现抓取机构相对地面垂直升降,所述抓取机构通过第一转动副40安装在支撑板33一面,通过第一转动副40可实现抓取机构绕回转轴线任意角度转动,进而满足墙板纵装和横装作业要求。
27.该种pc墙板可平动微调安装设备在施工过程中,具体作业工况如下:
28.对照图1、图2、图4,墙板抓取作业,在第五液压缸15驱动下,下压臂12与板架10配合,完成墙板41抓取作业。
29.对照图1、图2、图3、图5、图6,墙板纵装作业,三自由度支撑板调节机构在电机4、第一、二、三、四液压缸协同驱动下,受控耦合运动,带动抓取机构相对于地面垂直上升,墙板相对地面上升至指定高度;随后抓取机构通过第一转动副40相对支撑板33九十度转动,完
成墙板立板作业;最后施工人员通过推拉固定手柄3并通过控制三自由度支撑板调节机构,实现墙板垂直落至指定位置,完成墙板纵装作业。
30.对照图1、图2、图3、图7,墙板横装作业,三自由度支撑板调节机构在电机4、第一、二、三、四液压缸协同驱动下,受控耦合运动,带动抓取机构相对于地面垂直上升,墙板相对地面上升至指定高度;施工人员通过推拉固定手柄3并通过控制三自由度支撑板调节机构,实现墙板垂直落至指定位置,完成墙板横装作业。
31.最后,以相同的工作原理控制抓取机构回至初始位置,进行下一次墙板抓取安装作业。除说明书所述的技术特征外,均为本专业技术人员的已知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。