技术特征:
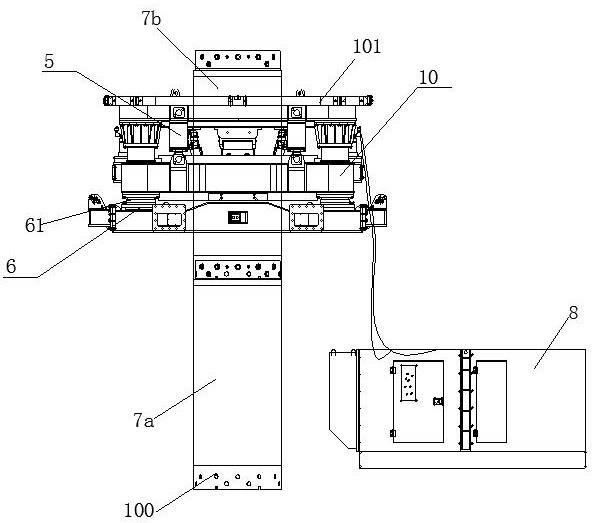
1.一种电驱动全套管全回转钻机,包括钻机主体以及钻具,钻机主体包括控制器、驱动部、随钻参数监测模块以及液压机构,钻具包括套管以及安装于所述套管的钻头,其特征在于,所述的驱动部采用电驱动方式,包括若干伺服电机;所述控制器内集成有参数调控模块以及派生参数计算模块;其中:所述的伺服电机,分为两类,对应为第一类、第二类伺服电机;第一类伺服电机的动力输出端与钻具联动连接;钻具在第一类伺服电机的动力驱动下,能够驱动钻具旋转钻进;第二类伺服电机的动力输出端依次通过液压油泵、液压马达与安装在液压机构油路中的油缸控制阀组总成联动连接;液压机构在第二类伺服电机的动力驱动下,能够实现套管的松、夹、压、拔动作和钻机平台的调平;所述的随钻参数监测模块,用于实时监测套管的转速、套管的垂直钻进深度、伺服电机的电流电压变化、伺服电机的输出扭矩以及液压机构各油缸的进、出油压力,并分别反馈至参数调控模块、派生参数计算模块;所述的派生参数计算模块,根据随钻参数监测模块所反馈的钻机直测参数计算出对应的钻机派生参数,并输出至参数调控模块;所述的钻机派生参数包括动力头扭矩、钻进率、周转速以及下压力;所述的参数调控模块,基于地层表功数学模型而构建,能够根据所接收到的钻机直测参数、钻机派生参数预测地层类型,并根据所预测的地层类型向伺服电机输出执行指令;在参数调控模块输出的执行指令的控制下,第一类伺服电机的总工作扭矩能够与所预测的地层类型匹配,第二类伺服电机带动液压机构所提供的下压力能够与所述的第一类伺服电机的总工作扭矩匹配。2.根据权利要求1所述的电驱动全套管全回转钻机,其特征在于:所述的参数调控模块包括参数输入模块、地层表功计算模块、地层类型预测模块以及执行指令输出模块;所述的参数输入模块,用于接收随钻参数监测模块所采集到的钻机直测参数以及派生参数计算模块所输出的钻机派生参数;所述的地层表功计算模块,根据参数输入模块所接收到的钻机直测参数、钻机派生参数,计算出实时地层比功,并传输至地层类型预测模块;所述的地层类型预测模块,将所接收到的实时地层比功与预设的地层质量比功分级表进行比对,以预测出对应的地层类型;所述的执行指令输出模块,根据所预测的地层类型,向伺服电机输出执行指令,使得第一类伺服电机的总工作扭矩能够与所预测的地层类型匹配、第二类伺服电机带动液压机构所提供的下压力能够与所述的第一类伺服电机的总工作扭矩匹配。3.根据权利要求2所述的电驱动全套管全回转钻机,其特征在于:所述第一类伺服电机有四个,对应为电机m1至m4;电机m1至m4均各自通过一个动力传动机构与钻具联动连接,用于协同驱动钻具旋转;所述的电机m1至m4中,两两为一组,对称分布在钻具的两侧;所述控制器内集成有自适应钻进扭矩控制模块,包括电机转速采集模块、电机转速判断模块、电机扭矩采集模块、电机扭矩判断模块以及电机扭矩执行模块;所述的电机转速判断模块有两个,对应为第一、第二电机转速判断模块;所述的电机扭矩判断模块包括两个,对应为第一、第二电机扭矩判断模块;其中:
所述的电机转速采集模块,用于采集电机m1至m4的转速,并输出至第一电机转速判断模块;所述的电机扭矩采集模块,用于采集电机m1至m4的扭矩,并输出至第一电机扭矩判断模块;所述的第一电机转速判断模块,用于判断平均转速n和给定转速n0差的绝对值|n-n0|是否小于n0*0.5%;当判断结果表明|n-n0|<n0*0.5%时,触发第一电机扭矩判断模块,反之则触发第二电机转速判断模块;其中:平均转速n根据所接收到的电机m1至m4的转速计算得出;所述的第二电机转速判断模块,用于判断平均转速n是否小于给定转速n0,当判断结果表明n<n0时,通过电机扭矩执行模块输出第一电机扭矩执行指令,反之则通过电机扭矩执行模块输出第二电机扭矩执行指令;所述的电机m1至m4,在第一电机扭矩执行指令的控制下,同时增加电机m1至m4的扭矩,增加幅度为给定扭矩n0的1%;所述的电机m1至m4,在第二电机扭矩执行指令的控制下,同时减小电机m1至m4的扭矩,减小幅度为给定扭矩n0的1%;所述的第一电机扭矩判断模块,用于判断平均扭矩t和任一电机m
i
的扭矩t
i
的差的绝对值|t-t
i
|是否小于t*5%,其中i=1,2,3,4;平均扭矩t根据所接收到的电机m1至m4的扭矩计算而得;当判断结果表明|t-t
i
|<t*5%,通过电机扭矩执行模块输出第三电机扭矩执行指令;反之则触发第二电机扭矩判断模块;所述的电机m1至m4,在第三电机扭矩执行指令的控制下,电机m1至m4的扭矩为给定扭矩n0;所述的第二电机扭矩判断模块,用于判断平均扭矩t是否小于任一电机m
i
的扭矩t
i
,当判断结果表明t<t
i
时,通过电机扭矩执行模块输出第四电机扭矩执行指令,反之则通过电机扭矩执行模块输出第五电机扭矩执行指令;所述的电机m1至m4,在第四电机扭矩执行指令的控制下,下调对应电机m
i
的扭矩,下调幅度为给定扭矩n0的1%;所述的电机m1至m4,在第五电机扭矩执行指令的控制下,增加对应电机m
i
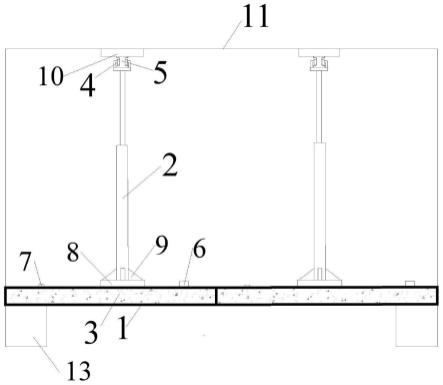
的扭矩,增加幅度为给定扭矩n0的1%。4.根据权利要求3所述的电驱动全套管全回转钻机,其特征在于:所述钻机主体配设有垂直度控制装置,包括激光网格发射器、摄像头以及垂直度控制模块;其中:所述激光网格发射器的数量为两台,对称分布在所述钻机主体的两侧;所述激光网格发射器用于向所述套管的外表面映射网格结构光;所述摄像头的数量为两台,对称分布在所述钻机主体的两侧,并一一对应地用于采集相应激光网格发射器映射至套管外表面的网格结构光图像,同时将所采集到的网格结构光图像信息反馈至垂直度控制模块;所述垂直度控制模块集成于所述控制器内,能够根据两个摄像头所反馈的图像信息,拼合处理后判断所述套管是否处于垂直状态,并根据判断结果向液压机构中的调平油缸发出执行指令,控制调平油缸伸缩,使得所述套管始终处于垂直状态。5.根据权利要求4所述的电驱动全套管全回转钻机,其特征在于:两台激光网格发射器和两台摄像头均对称齐平地安装在钻机主体的两侧;所述激光网格发射器能够水平发射网格结构光并覆盖套管相应侧的外圆柱面;两台激光网格发射器所发射的网格结构光能够完整拼合覆盖套管的外圆柱面,以形成一系列封闭
的圆或椭圆;所述垂直度控制模块建立所述图像信息的位姿与所述调平油缸的伸缩杆伸长量之间的函数关系,并根据函数关系调节所述调平油缸的伸缩杆伸长量,以调节所述套管至垂直状态。6.根据权利要求4所述的电驱动全套管全回转钻机,其特征在于:所述的随钻参数监测模块,包括若干传感器,对应为轴编码器、位移传感器、霍尔电流电压传感器、扭矩传感器、及液体压力传感器;所述的轴编码器用于实时监测套管的转速,安装在套管附近的钻机主体上;所述的位移传感器用于实时监测套管的垂直钻进深度,安装在套管附近的钻机主体上;所述的霍尔电流电压传感器,针对每一个伺服电机均配设一个;各霍尔电流电压传感器一一对应地安装在相应伺服电机的工作电路中,用于监测各自对应的伺服电机的电流电压变化;所述的扭矩传感器,针对每一个伺服电机均配设一个;各扭矩传感器均与相应的伺服电机的输出轴同轴安装,用于实时监测对应伺服电机的输出扭矩;液压机构包括起拔油缸、调平油缸以及上、下夹紧油缸;起拔油缸、调平油缸以及上、下夹紧油缸的进、出油管处均安装有一个液体压力传感器;所述的液体压力传感器用于监测安装位点处的油压。7.根据权利要求5所述的电驱动全套管全回转钻机,其特征在于:所述驱动部采用外部电网/发电机组供电。8.一种权利要求1所述的电驱动全套管全回转钻机的控制方法,其特征在于:所述的电驱动全套管全回转钻机中控制器内所集成的参数调控模块,按照如下步骤执行:步骤a1、钻机直测参数的监测钻机直测参数包括套管的转速、套管的垂直钻进深度、伺服电机的电流电压变化、伺服电机的输出扭矩以及液压机构各油缸的进出油压力;其中,采用安装在套管附近的钻机主体上的轴编码器实时监测套管的转速,并分别传输至参数调控模块、派生参数计算模块;采用安装在套管附近的钻机主体上的位移传感器实时监测套管的垂直钻进深度,并分别传输至参数调控模块、派生参数计算模块;采用霍尔电流电压传感器监测对应伺服电机的电流电压变化,并分别传输至参数调控模块、派生参数计算模块;采用扭矩传感器实时监测对应伺服电机的输出扭矩,并分别传输至参数调控模块、派生参数计算模块;采用液体压力传感器监测安装位点处的油压,以获得相应油缸的进出油压力,并分别传输至参数调控模块、派生参数计算模块;步骤a2、计算钻机派生参数根据所接收到的钻机直测参数,计算出钻机派生参数;钻机派生参数包括动力头扭矩、钻进率、周转速以及下压力;步骤a3、计算实时地层比功采用地层比功数学模型,根据所接收到的钻机直测参数、钻机派生参数,获得实时地层比功;步骤a4、预测地层类型
将所计算出的实时地层比功与参数调控模块内预存的地层质量比功分级表比对,预测地层类型;步骤a5、工作扭矩、下压力的分配根据预测出的地层类型,分别向第一类、第二类伺服电机的电机驱动器输出执行指令,从而为第一类伺服电机分配与地层类型匹配的工作扭矩,而为第二类伺服电机分配与前述第一类伺服电机的工作扭矩匹配的下压力;步骤a6、伺服电机的工况控制第一类、第二类伺服电机按照步骤五输出的执行指令工作。9.根据权利要求8所述的电驱动全套管全回转钻机的控制方法,其特征在于:所述的电驱动全套管全回转钻机中所述控制器集成有自适应钻进扭矩控制模块,自适应钻进扭矩控制模块通过自适应扭矩控制方法而实现电机m1至电机m4的扭矩自适应控制;自适应扭矩控制方法包括如下步骤:步骤b1:预设给定转速n0,同时采集电机m1至电机m4的转速,分别为n1、n2、n3、n4,并且计算出电机m1至m4的平均转速n,n=(n1 n2 n3 n4)/4;随后进入步骤b2;步骤b2:计算平均转速n和给定转速n0差的绝对值|n-n0|,计算n0*0.5%的值,如果|n-n0|<n0*0.5%,则进入步骤b3,否则进入步骤b4;步骤b3:预设电机m1至电机m4的给定扭矩均为t0;并采集电机m1至电机m4的实际扭矩,分别为t1、t2、t3、t4,计算电机m1至m4的平均扭矩t,t=(t1 t2 t3 t4)/4,随后进入步骤b7;步骤b4:比较平均转速n与给定转速n0的大小,如果n<n0,则进入步骤b5,否则进入步骤b6;步骤b5:使电机m1至电机m4的实际扭矩分别为:t1=t0*101%,t2=t0*101%,t3=t0*101%,t4=t0*101%,实现自适应钻进扭矩控制,随后进入步骤b12;步骤b6:使电机m1至电机m4的实际扭矩分别为:t1=t0*99%,t2=t0*99%,t3=t0*99%,t4=t0*99%,实现自适应钻进扭矩控制,随后进入步骤b12;步骤b7:计算平均扭矩t和电机m
i
扭矩t
i
的差的绝对值|t-t
i
|,计算t*5%的值,如果|t-t
i
|<t*5%,则进入步骤b8,否则进入步骤b9;其中i=1,2,3,4;步骤b8:保持电机m1至电机m4的实际扭矩t
i
等于给定扭矩t0,即t
i
=t0,实现自适应钻进扭矩控制,随后进入步骤b12;其中i=1,2,3,4;步骤b9:分别比较平均扭矩t与电机m1的实际扭矩t
i
的大小,如果t<t
i
,则进入步骤b10,否则进入步骤b11;其中i=1,2,3,4;步骤b10:使电机m
i
的实际扭矩t
i
=t0*99%,实现自适应钻进扭矩控制,随后进入步骤b12;其中i=1,2,3,4;步骤b11:使电机m
i
的实际扭矩t
i
=t0*101%,实现自适应钻进扭矩控制,随后进入步骤b12;其中i=1,2,3,4;步骤b12:判断是否结束自适应钻进扭矩控制程序,是则结束程序,否则进入步骤b1。10.根据权利要求8所述的电驱动全套管全回转钻机的控制方法,其特征在于:所述的电驱动全套管全回转钻机中所述控制器集成有垂直度控制模块,垂直度控制模块控制套管的垂直调节过程如下:步骤c1:将两个激光网格发射器对称分布在钻机主体的两侧,将上一节套管安装至钻
机主体;步骤c2:两个激光网格发射器均向上一节套管的外表面发射网格结构光,使得上一节套管的外表面形成封闭的图形;步骤c3:采用两个摄像头对上一节套管上的封闭的图形进行采集,并通过垂直度控制模块对采集到的图形信息进行分析;步骤c4:通过垂直度控制模块建立封闭的图形的位姿与钻机主体上各调平油缸的伸缩杆伸长量的函数关系;步骤c5:若上一节套管上的封闭的图形为椭圆形,则依据函数关系调节各伸缩杆的伸长量,以对上一节套管的垂直度进行实时纠正,直至上一节套管上的封闭的图形为圆形;步骤c6:当上一节套管钻进到接近所述钻机主体的钻机平台的顶面后,在上一节套管上部连接下一节套管,依照步骤c2到步骤c6的调节方法对下一节套管进行实时垂直度监测和垂直度纠正,直至钻进到预设标高。11.根据权利要求10所述的电驱动全套管全回转钻机的控制方法,其特征在于:所述的步骤c2中,两个激光网格发射器均向上一节套管的外表面发射网格结构光,使得上一节套管的外表面从上到下依次形成至少两个封闭的图形;步骤c4中,在垂直度控制模块中建立上一节套管上的封闭的图形的数字孪生模型,并建立所述数字孪生模型的极坐标系,并由所述垂直度控制模块对所述数字孪生模型进行实时更新;步骤c5中,调节钻机主体上各个伸缩杆的伸长量,直至所述钻机主体的钻机平台水平。
技术总结
本发明涉及电驱动全套管全回转钻机及其控制方法。钻机包括钻机主体以及钻具,钻机主体包括控制器、驱动部、随钻参数监测模块以及液压机构,钻具包括套管以及钻头,驱动部采用电驱动方式,包括若干伺服电机;控制器内集成有参数调控模块;伺服电机分为第一类、第二类伺服电机,第一类伺服电机用于驱动钻具旋转钻进,第二类伺服电机用于驱动液压油泵,以通过油缸控制阀组总成来控制液压机构的伸缩,实现套管的松、夹、压、拔动作和钻机平台的调平;参数调控模块通过地层表功数学模型辨识地层类型,并通过分配第一类伺服电机的总工作扭矩以及第二类伺服电机带动液压机构所提供的下压力,满足相应地层类型需要,从而提高旋挖质量,并保护钻具。并保护钻具。并保护钻具。
技术研发人员:陈卫 卢昊 江城树 魏垂勇 陈小青 王颖杰 陈国安 刘海媛 王从明 顾齐齐
受保护的技术使用者:中国矿业大学
技术研发日:2022.05.19
技术公布日:2022/6/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。