1.本发明涉及自动驾驶技术领域,具体涉及基于场景的车辆行驶轨迹生成方法及可读存储介质。
背景技术:
2.在自动驾驶技术研发迭代过程中,自动驾驶测试是必不可少的一个环节,自动驾驶车辆必须经过大量的仿真和道路测试才能验证其安全性和可靠性。考虑到测试效率和测试成本问题,仿真测试能够支持数以万计场景的自动化测试,极大地降低了测试成本和提高了测试效率。其中,车辆的行驶轨迹对于道路路况的计算具有十分重要的参考作用。
3.现有基于场景目标车辆的行驶轨迹生成方法,一方面,假设目标车辆以恒定的减速度进行制动,描述制动场景或者假设目标车辆以正弦或者双曲线的方式进行变道,从而描述变道场景。另一方面,基于路采设备采集不同交通参与者的直行、左转、右转等行驶轨迹,分类处理和生成公交车、大货车、轿车等不同类型交通参与者的行驶轨迹库或者行为模型库,用于场景设计过程中目标车辆行驶轨迹的生成。
4.然而,申请人发现,现有基于场景目标车辆的行驶轨迹生成方法存在以下局限性:1)其通过假设车辆恒定减速度制动或者正弦、双曲线方式变道等方法,极大的简化了真实世界中驾驶员进行制动或变道行为的过程,降低了行驶轨迹生成的真实性;2)其通过路采设备采集行驶轨迹生成行为模型库,导致行驶轨迹生成的成本较高,并且可能存在行为模型库中的行驶轨迹无法匹配场景所设置的初始状态的情况,导致很容易生成无效的仿真场景。因此,如何设计一种能够兼顾行驶轨迹生成的效率和真实性、且能够降低轨迹生成和仿真测试成本的车辆行驶轨迹生成方法是亟需解决的技术问题。
技术实现要素:
5.针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种基于场景的车辆行驶轨迹生成方法,以能够兼顾行驶轨迹生成的效率和真实性,且能够降低轨迹生成和仿真测试的成本,从而能够提高自动驾驶场景仿真的效果。
6.为了解决上述技术问题,本发明采用了如下的技术方案:
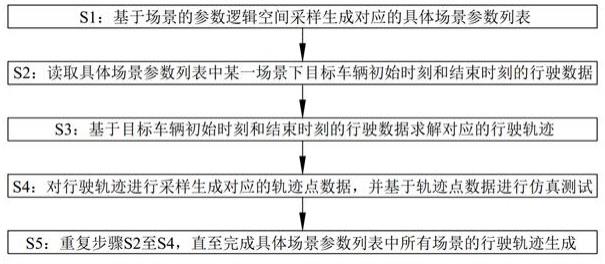
7.基于场景的车辆行驶轨迹生成方法,包括以下步骤:
8.s1:基于场景的参数逻辑空间采样生成对应的具体场景参数列表;
9.s2:读取具体场景参数列表中某一场景下目标车辆初始时刻和结束时刻的行驶数据;
10.s3:基于目标车辆初始时刻和结束时刻的行驶数据求解对应的行驶轨迹;
11.s4:对行驶轨迹进行采样生成对应的轨迹点数据,并基于轨迹点数据进行仿真测试;
12.s5:重复步骤s2至s4,直至完成具体场景参数列表中所有场景的行驶轨迹生成。
13.优选的,步骤s1中,通过设置的采样算法从逻辑场景的参数取值范围中选取场景
的具体参数,生成对应具体场景参数列表。
14.优选的,步骤s1中,采样算法包括但不限于蒙特卡洛采样法、重要性采样法、随机采样法和分层采样法。
15.优选的,步骤s2中,行驶数据包括但不限于位置数据、速度数据、加速度数据和变道时间数据。
16.优选的,步骤s3中,采用五次多项式求解行驶轨迹,生成对应的行驶轨迹方程。
17.优选的,步骤s3中,具体包括以下步骤:
18.s301:构建分别用于表示行驶轨迹方程、速度方程和加速度方程的五次多项式方程;
19.s302:将目标车辆初始时刻和结束时刻的行驶数据带入上述用于表示行驶轨迹方程、速度方程和加速度方程的五次多项式方程,求解对应的方程系数;
20.s303:将方程系数带入用于表示行驶轨迹方程的五次多项式方程生成行驶轨迹方程。
21.优选的,步骤s4中,基于行驶轨迹方程结合对应场景的初始位置坐标数据,以时间间隔δt为采样间隔,生成目标车辆从初始时刻到结束时刻的轨迹点数据。
22.优选的,步骤s4中,将对应的轨迹点数据读写至对应的自动驾驶仿真测试场景文件中,以完成仿真测试。
23.优选的,步骤s4中,判断具体场景参数列表中的场景是否遍历生成完成:若是,则完成行驶轨迹生成;否则,返回步骤s2。
24.本发明还公开了一种可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现本发明的基于场景的车辆行驶轨迹生成方法的步骤。
25.本发明的车辆行驶轨迹生成方法与现有技术相比,具有如下有益效果:
26.本发明基于场景参数逻辑空间采样生成具体场景参数列表,然后读取具体场景参数列表中目标车辆初始时刻和结束时刻的行驶数据并求解目标车辆的行驶轨迹,进而将行驶轨迹进行采样并基于轨迹点数据进行仿真测试。一方面,本发明通过读取目标车辆在场景下的行驶数据直接求解车辆的行驶轨迹,而无需通过路采设备采集行驶轨迹来生成行为模型库,从而能够降低轨迹生成和仿真测试的成本,并能够提高行驶轨迹生成的效率。另一方面,本发明能够匹配目标车辆的初始时刻和结束时刻的行驶状态(行驶数据),并且无需简化真实世界中驾驶员进行制动或变道行为的过程,从而能够提高车辆行驶轨迹生成的真实性和自动驾驶场景仿真的效果。同时,本发明通过遍历具体场景参数列表中的场景,能够保证目标车辆的行驶轨迹生成的有效性和准确性。
附图说明
27.为了使发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:
28.图1为基于场景的车辆行驶轨迹生成方法的逻辑框图。
具体实施方式
29.下面通过具体实施方式进一步详细的说明:
30.实施例一:
31.本实施例中公开了一种基于场景的车辆行驶轨迹生成方法。
32.如图1所示,基于场景的车辆行驶轨迹生成方法,包括以下步骤:
33.s1:基于场景的参数逻辑空间采样生成对应的具体场景参数列表;
34.s2:读取具体场景参数列表中某一场景下目标车辆初始时刻和结束时刻的行驶数据;
35.s3:基于目标车辆初始时刻和结束时刻的行驶数据求解对应的行驶轨迹;
36.s4:对行驶轨迹进行采样生成对应的轨迹点数据,并基于轨迹点数据进行仿真测试;
37.s5:重复步骤s2至s4,直至完成具体场景参数列表中所有场景的行驶轨迹生成。具体的,判断具体场景参数列表中的场景是否遍历生成完成:若是,则完成行驶轨迹生成;否则,返回步骤s2。
38.需要说明的是,本发明中基于场景的车辆行驶轨迹生成方法可通过程序编程的方式生对应的成软件代码或软件服务,进而能够在服务器和计算机上运行和实施。
39.本发明基于场景参数逻辑空间采样生成具体场景参数列表,然后读取具体场景参数列表中目标车辆初始时刻和结束时刻的行驶数据并求解目标车辆的行驶轨迹,进而将行驶轨迹进行采样并基于轨迹点数据进行仿真测试。一方面,本发明通过读取目标车辆在场景下的行驶数据直接求解车辆的行驶轨迹,而无需通过路采设备采集行驶轨迹来生成行为模型库,从而能够降低轨迹生成和仿真测试的成本,并能够提高行驶轨迹生成的效率。另一方面,本发明能够匹配目标车辆的初始时刻和结束时刻的行驶状态(行驶数据),并且无需简化真实世界中驾驶员进行制动或变道行为的过程,从而能够提高车辆行驶轨迹生成的真实性和自动驾驶场景仿真的效果。同时,本发明通过遍历具体场景参数列表中的场景,能够保证目标车辆的行驶轨迹生成的有效性和准确性。
40.具体实施过程中,通过设置的采样算法从逻辑场景的参数取值范围中选取场景的具体参数,生成对应具体场景参数列表。其中,采样算法包括但不限于蒙特卡洛采样法、重要性采样法、随机采样法和分层采样法。本实施例中,以切出场景为例,基于表1所示的动态场景参数逻辑空间,通过随机采样法从每个参数的逻辑空间中抽取10个具体数值,并进行组合形成具体场景参数列表。
41.表1切出场景参数逻辑空间
[0042][0043]
本发明通过上述步骤能够很好的采样生成对应的具体场景参数列表,进而能够通过读取目标车辆在场景下的行驶数据直接求解车辆的行驶轨迹,并且能够匹配目标车辆的初始时刻和结束时刻的行驶状态(行驶数据),从而能够提高行驶轨迹生成的效率和真实性。
[0044]
具体实施过程中,行驶数据包括但不限于位置数据、速度数据、加速度数据和变道时间数据。本实施例中,如表2所示,筛选出来的其中一个具体场景的目标车辆行驶数据,并以其中初始时刻和结束时刻的行驶数据作为行驶轨迹设计的基础,目标车辆行为初始时刻和结束时刻的位置数据(x_target_t0,y_target_t0,x_target_t1,y_target_t1)、速度数据(v
x
_target_t0,vy_target_t0,v
x
_target_t1,vy_target_t1)、加速度数据(a
x
_target_t0,ay_target_t0,a
x
_target_t1,ay_target_t1)和变道时间δt数据。其中,t0表示初始时刻,t1表示结束时刻。
[0045]
表2切入场景的目标车辆行为数据
[0046][0047]
具体实施过程中,采用五次多项式求解行驶轨迹,生成对应的行驶轨迹方程。
[0048]
具体包括以下步骤:
[0049]
s301:构建分别用于表示行驶轨迹方程、速度方程和加速度方程的五次多项式方程;
[0050][0051][0052][0053]
s302:将目标车辆初始时刻和结束时刻的行驶数据带入上述用于表示行驶轨迹方程、速度方程和加速度方程的五次多项式方程,求解对应的方程系数(a,a1,a2,a3,a4,a5,a6)和(b,b1,b2,b3,b4,b5);
[0054]
s303:将方程系数带入用于表示行驶轨迹方程的五次多项式方程生成行驶轨迹方程。本实施例中,求解过程以包括但不限于matlab代码进行实现。
[0055]
本发明通过五次多项式方程能够基于目标车辆在场景下的行驶数据直接求解车辆的行驶轨迹,并且能够在求解过程中匹配目标车辆的初始时刻和结束时刻的行驶状态,从而能够提高行驶轨迹生成的效率和真实性。
[0056]
具体实施过程中,步骤s4中,基于行驶轨迹方程结合对应场景的初始位置坐标数据,以时间间隔δt为采样间隔,生成目标车辆从初始时刻到结束时刻的一系列(变道)轨迹点数据(t,x,y)。然后将对应的(变道)轨迹点数据(t,x,y)读写至对应的自动驾驶仿真测试场景文件中,以完成仿真测试。本实施例中,场景文件包括但不限于openscenario文件,通过matlab将采样得到的轨迹点数据(t,x,y)自动填充在openscenario文件中《maneuver》节点下的《followtrajectoryaction》节点中,输出完整且有效的场景文件。
[0057]
本发明通过上述方式能够有效的对行驶轨迹方程进行采样生成轨迹点数据,进而实现读取轨迹点数据来进行仿真测试,使得能够通过读取目标车辆在场景下的行驶数据直接求解车辆的行驶轨迹,无需简化真实世界中驾驶员进行制动或变道行为的过程,从而能够提高车辆行驶轨迹生成的真实性和自动驾驶场景仿真的效果。
[0058]
实施例二:
[0059]
本实施例中公开了一种可读存储介质。
[0060]
一种可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现本发明的基于场景的车辆行驶轨迹生成方法的步骤。可读存储介质可以是u盘或计算机等具有可读存储功能的设备。
[0061]
最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
