1.本发明涉及一种可膨胀脊柱融合器,更具体地涉及一种能够以最低高度插在椎骨本体之间的脊柱融合器,且其高度可随着插入进行调整。
背景技术:
2.椎骨本体包括32-35块形成身体的椎骨,以及椎间盘,即布置在椎骨之间的脊柱盘,并且椎骨本体是形成人身体脊骨的一部分,脊骨连接上颅骨和下骨盆以形成躯干的支柱。
3.脊柱由上包括7块颈椎椎骨、12块胸椎椎骨、5块腰椎椎骨、5块骶骨椎骨和3-5块尾椎。就成人而言,5块骶骨椎骨融合在一起以形成1块骶骨椎骨,3-5块尾椎融合在一起以形成1块尾骨。
4.作为长期以来用于治疗严重脊柱疾病的治疗方法之一,存在脊柱融合。这种脊柱融合是一种外科方法,其包括移除椎间盘,并插入代替椎间盘的器件以使相邻的椎骨本体彼此融合。
5.当在腰椎椎骨中执行脊柱融合时,可根据器件的插入方向将脊柱融合分为后路腰椎椎间体融合(plif)、经椎间孔腰椎椎间体融合(tlif)、直接侧面腰椎椎间体融合(dlif)、斜腰椎椎间体融合(olif)和前路腰椎椎间体融合(alif)。
6.plif是这样一种方法,其包括沿脊柱的中心线切开背部,打开以便使所有椎骨本体暴露,移除椎骨后路侧的一部分,然后移除盘,并将plif器件插在椎骨之间。
7.plif是脊柱融合中已执行的最古老的,并且是一种在融合两个或三个关节时绝对必要的方法。然而,由于外科手术进程,plif存在各种缺点,例如:与神经、韧带和肌肉粘连的可能性高;由于切口面积大,愈合时间延长一段时间;并且对一些人副作用大。
8.plif器件是所有脊柱融合中使用的器件最小的,其中,一对小器件在脊柱的左侧和右侧被置换。
9.tlif是这样一种外科方法,其包括沿脊柱肌肉两侧以小面积切开背部,将椎骨本体暴露到最低限度,然后当在神经孔引出的方向移除脊柱关节部位的同时通过更换盘插入tlif器件。由于出血更少和手术时间缩短的优点,这种外科技术适用于一个关节的情况。然而,如果需要在多个部位进行手术,则应执行plif外科手术。大部分tlif器件形成拱形形状,使得其放置在椎骨本体中,并旋转以使tlif器件的凸面部分面向胃。tlif器件比plif器件大,但支撑面积比dlif器件或将在下文进行描述的alif器件小。
10.alif具有各种优点,如手术恢复快和无需担心粘连。然而,alif有一个缺点是需要极为先进的技术,因为手术是通过切开前部(胃)以绕过肠道并接近脊柱来执行的。alif器件有一个优点是在所有脊柱融合器中具有的支撑面积最大。
11.开发llif是为了克服alif、plif和tlif的缺点。由于手术是经侧方切口执行的,所以llif的优点是椎骨之间的狭窄部位的间隙可能比通过背部切口执行的传统外科手术更加极大地加宽,并且对周围组织几乎没有损伤。然而,由于腰大肌肌肉和腹膜布置在待手术
入路周围,所以如果在手术期间出现错误,则存在导致大腿肌肉麻痹的问题。dlif器件比alif器件小,但比plif器件或tlif器件大。
12.与llif相比,更安全和更有效的方法是olif(其可被称为atp)。olif的优点是手术入路在倾斜于侧方的方向形成,并且可在第四腰椎椎骨(l4)与第五腰椎椎骨(l5)之间进行手术,第四腰椎椎骨和第五腰椎椎骨由于腰大肌肌肉和腹膜难以通过dlif进行手术。此外,在dlip中可能是个问题的损伤神经的可能性明显更小。
13.传统的脊柱融合器由单个本体制成,使用诸如钛的金属材料或诸如peek的聚合物材料,横截面积或高度无变化。因为这样,考虑到患者的体形、高度、种族、性别等,其产品数量众多。换言之,制造商担负将宽度、长度和高度三个变量结合起来,以生产至少数十到数百种产品。
14.另外,患者椎骨之间的间隙不会以固定的间隙增大,但是如果以单一组别进行生产,则因为有必要从已经存在的产品范围中选择合适高度而存在无法妥善处理每位患者的问题。
15.已进行了各种尝试来解决上述问题,并且已开发了一种高度可调的脊柱融合器。
16.us6176882公开了这样一种高度可调的器件。us6176882的器件包括顶部和底部开口的矩形箱形壁、在该壁内竖直移动的接合构件、一对用于按压该接合构件的楔形构件、以及与楔形构件螺接以调整该对楔形构件的间距的调整元件。因此,us6176882的问题是接合构件和楔形构件仅由箱形壁阻挡,并且它们彼此不连接,使得接合构件晃动。
17.为了进行比较,us9034041在其权利要求1的发明中公开了一种器件,该器件大体包括本体组件、上支撑构件718(在下文中,未示出)和下支撑构件720,其中,本体组件具有第一部分712和第二部分714,并且第一部分712和第二部分714通过控制构件在纵轴上移动。上支撑构件718与下支撑构件720之间的间距由一对第一上保持构件和一对第二上保持构件限定。因此,us9034041的问题是器件不包括用于直接引导上支撑构件718和下支撑构件720相互运动的部件,因此本体组件、上支撑构件718和下支撑构件720关于彼此晃动。
18.us2017-02580605a公开了一种用于如其图26至图29中所示的高度可调的器件的持有器400。us2017-02580605a使用了一种方法,在该方法中,将多个臂402(在下文中,未示出)插入到套管410中或从套管410突出,然后将形成在臂402的端部上的突出件404安装在器件300的凹槽320中以固定器件300。然而,这种方法的问题是,由于臂402通过其弹性延伸,所以持有器400在因反复使用或外科手术部位周围肌肉的阻塞耦接至植入物302的情况下无法分离的可能性高。
19.[现有技术文件]
[0020]
[专利文件]
[0021]
(专利文件1)美国专利号6,176,882
[0022]
(专利文件2)美国专利号9,034,041
[0023]
(专利文件3)美国专利申请公开号us2017-02580605a
技术实现要素:
[0024]
[本发明所要解决的问题]
[0025]
本发明的目的是提供一种可膨胀脊柱融合器,该可膨胀脊柱融合器以最低高度插
在椎骨本体之间,并且可以稳定地支撑一对端板的运动,同时能够随着插入调整其高度。
[0026]
[解决问题的方式]
[0027]
为实现上述目的,根据本发明的一个方面,提供了一种脊柱融合器,包括:第一端板和第二端板,配置为抵接相邻的椎骨本体;远端移动块,安装成关于在第一端板和第二端板中的每一个的一端形成的板倾斜部分相对移动;近端移动块,安装成关于在第一端板和第二端板中的每一个的另一端形成的板倾斜部分相对移动;调整构件,可旋转地安装在近端移动块中并与远端移动块螺接,以便调整远端移动块与近端移动块之间的距离;第一引导单元,朝向第二端板在第一端板中形成;和第二引导单元,朝向第一端板在第二端板中形成,以通过与第一引导单元滑动来阻止第一端板和第二端板在它们彼此靠近或彼此间隔开的方向的运动,其中,第一引导单元和第二引导单元配置为支撑第一端板和第二端板在其纵向方向或宽度方向的载荷。
[0028]
远端移动块和近端移动块可以具有形成其中的块滑动器,并且第一端板和第二端板的板倾斜部分可以具有形成其中的板滑动器,以关于块滑动器滑动。
[0029]
块滑动器和板滑动器可以具有燕尾形状,以便保持彼此接合的状态。
[0030]
调整构件可以包括:螺纹部分,螺接至在远端移动块中形成在一端的螺纹孔;和销座,固定至另一端,以便关于近端移动块可旋转,其中,调整构件销通过近端移动块位于销座中。
[0031]
第一引导单元可以包括向第二端板突出的柱体,并且第二引导单元可以包括朝向第一端板延伸的延伸壁,以关于柱体滑动。
[0032]
第一引导单元可以包括围绕柱体形成的容纳凹部,以在第一端板和第二端板彼此靠近时容纳延伸壁。
[0033]
延伸壁可以包括:第一壁和第二壁,在第二端板的纵向方向位于柱体的前端和后端;和第三壁,其连接第一壁和第二壁以形成凹槽,柱体插入到凹槽中。
[0034]
第一壁和第二壁可以具有形成其上的止挡件,以围绕容纳凹部抵接在第一端板的底部表面上,使得第一端板和第二端板在第一端板和第二端板最大程度地彼此靠近的状态下以预定距离彼此间隔开。
[0035]
第一壁和第二壁可以包括形成其中的引导凹槽,以引导柱体插入到凹部中。
[0036]
柱体形成为具有横向厚度,该横向厚度大于一个值的1/4倍并且小于该值的1/2倍,该值将第一窗口的横向长度从第一板部分的横向长度排除。
[0037]
[有益效果]
[0038]
根据本发明,在一定范围内具有不同高度的器件可以由一个器件代替。因此,减少了应生产的产品组别的数量,还降低了制造商的库存量。此外,不像现有技术中以恒定间隙具有预定高度的器件,该脊柱融合器的高度根据患者椎骨本体之间的间隔进行线性调整,使得外科手术可根据患者的脊柱状况以最佳高度执行。
[0039]
另外,由于器件以最低高度插入,因此可以减轻制造负担,以根据椎骨本体之间的适当间隔单独生产现有测试插片,并且可以省去医生在依次插入多个测试插片的同时固定插入空隙的麻烦。
附图说明
[0040]
结合附图通过下面的详细描述将更清楚地理解本发明的上述及其他目的、特征以及其他优点,其中:
[0041]
图1是根据本发明实施例1的脊柱融合器在最低高度情况下的立体图;
[0042]
图2是图1所示的脊柱融合器在最高高度情况下的立体图;
[0043]
图3是图1所示的脊柱融合器的分解立体图;
[0044]
图4是从顶部看除调整构件外的图1所示的脊柱融合器的分解立体图;
[0045]
图5是从底部看除调整构件外的图1所示的脊柱融合器的分解立体图;
[0046]
图6是根据本发明实施例2的脊柱融合器在最低高度情况下的立体图;
[0047]
图7是图6所示的脊柱融合器在最高高度情况下的立体图;
[0048]
图8是图6所示的脊柱融合器的分解立体图;
[0049]
图9是从顶部看除调整构件外的图6所示的脊柱融合器的分解立体图;
[0050]
图10是从底部看除调整构件外的图6所示的脊柱融合器的分解立体图;
[0051]
图11是根据本发明的实施例的器件持有器的立体图;
[0052]
图12是图11所示的器件持有器的横截面立体图;
[0053]
图13是图11所示的器件持有器的局部放大横截面;
[0054]
图14是图11所示的器件持有器的分解立体图;
[0055]
图15是图11所示的器件持有器在分解状态下的横截面立体图;
[0056]
图16是主体的立体图;
[0057]
图17是持有本体的立体图;
[0058]
图18是图16所示的持有本体的局部放大平面图;
[0059]
图19是图11所示的端部执行器侧的器件持有器在分解状态下的平面图;
[0060]
图20是旋钮的立体图;
[0061]
图21是紧固件的立体图;
[0062]
图22是运动转换杆的立体图;
[0063]
图23是移动指示器的立体图;
[0064]
图24是保持器的立体图;
[0065]
图25是脊柱融合器在靠近实施例1的器件持有器的情况下的立体图;和
[0066]
图26是实施例1的脊柱融合器的立体图,该脊柱融合器因耦接到其的器件持有器处于最大高度。
具体实施方式
[0067]
在下文中,将参考附图详细描述本发明。在用附图标记表示各附图的构成元件时,应当注意,相同的元件将由相同的附图标记表示,尽管它们在不同的附图中示出。在本发明的实施例中,将不会描述被判断为能够使本发明的主旨不必要地模糊不清的公知功能和配置。
[0068]
图1至图5示出了根据本发明实施例1的脊柱融合器100,图6至图10示出了根据本发明实施例2的脊柱融合器200。在下文中,将一起描述实施例1和实施例2的相同部件,然后再分别描述实施例1和实施例2之间的不同。
[0069]
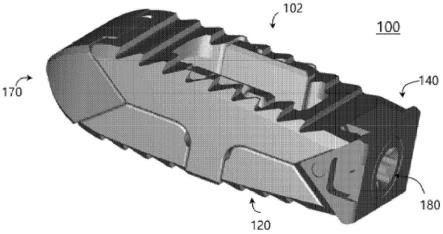
根据实施例1、实施例2的脊柱融合器100、200将参照图1至图5以及图6至图10进行描述。脊柱融合器100、200可以包括:第一端板102、202和第二端板120、220,其竖直设置,以彼此面对;远端移动块140、240和近端移动块170、270,其设置在第一端板102、202与第二端板120、220之间,以根据第一端板102、202和第二端板120、220之间的距离移动;和调整构件180、280,其通过穿过近端移动块170、270连接至远端移动块140、240。
[0070]
第一端板102、202和第二端板120、220具有配置为抵接椎骨本体的第一板部分104、204和第二板部分122、222。第一板部分104、204和第二板部分122、222可以具有形成其上的齿,以防止椎骨本体彼此分离。此外,用于插入骨移植物的第一窗口118、218和第二窗口138、238分别在第一板部分104、204和第二板部分122、222的中心部分形成。
[0071]
第一板导轨111、211、第二板导轨112、212、第三板导轨113、213和第四板导轨114、214在纵向方向形成在第一板部分104、204的两侧上。第一板导轨111、211和第二板导轨112、212定位成在远端方向彼此面对,并且第一板凹部110、210形成在这些导轨之间。第三板导轨113、213和第四板导轨114、214定位成在近端方向彼此面对,并且第二板凹部116、216形成在这些导轨之间。所有第一板导轨111、211、第二板导轨112、212、第三板导轨113、213和第四板导轨114、214都形成在第一板部分104、204的表面中,在厚度方向从端部朝向第一板部分104、204的中心向上倾斜延伸,彼此靠近。
[0072]
相似地,第五板导轨131、231、第六板导轨132、232、第七板导轨133、233和第八板导轨134、234在纵向方向形成在第二板部分122、222的两侧上。第五板导轨131、231和第六板导轨132、232设置成在远端方向彼此面对,并且第三板凹部130、230形成在这些导轨之间。另外,第七板导轨133、233和第八板导轨134、234定位成在近端方向彼此面对,并且第四板凹部136、236形成在这些导轨之间。所有第五板导轨131、231、第六板导轨132、232、第七板导轨133、233和第八板导轨134、234都形成在第二板部分122、222的表面中,在厚度方向从端部朝向第二板部分122、222的中心向上倾斜延伸,彼此靠近。
[0073]
远端移动块140、240具有通过以流线形状突出形成其中的插入部分142、242,以便易于在近端方向插在椎骨本体之间。此外,远端移动块140、240具有通过在远端方向伸长形成其中的连接杆144、244,并且具有螺纹的连接螺纹孔150、250形成在连接杆144、244内部。进一步地,远端移动块140、240具有:形成其上的第一块凸出部146、246,以便对应于第一端板102、202的第一板凹部110、210;以及形成其上的第二块凸出部148、248,以便对应于第二端板120、220的第三板凹部130、230。与第一板导轨111、211和第二板导轨112、212对应的第一块导轨151、251和第二块导轨152、252围绕第一块凸出部146、246形成。与第五板导轨131、231和第六板导轨132、232对应的第五块导轨151、251和第六块导轨162、262围绕第二块凸出部148、248形成。
[0074]
近端移动块170、270具有形成其中的通孔178、278,以可旋转地支撑调整构件180、280。此外,近端移动块170、270具有:形成其上的第三块凸出部172、272,以便对应于第一端板102、202的第二板凹部116、216;以及形成其上的第四块凸出部174、274,以便对应于第二端板120、220的第四板凹部136、236。与第三板导轨113、213和第四板导轨114、214对应的第三块导轨153、253和第四块导轨154、254围绕第三块凸出部172、272形成。与第七板导轨133、233和第八板导轨134、234对应的第七块导轨163、263和第八块导轨164、264围绕第四块凸出部174、274形成。此外,固定销192、194、固定销292、294插入到其中的固定销孔176、
276形成在近端移动块170、270的侧面上。进一步地,接合部分166、266形成在近端移动块170、270的侧面上,以通过工具握紧脊柱融合器100、200。
[0075]
远端移动块140、240和近端移动块170、270具有大致楔形的形状,并且配置为通过向上或向下按压来移动第一端板102、202和第二端板120、220。
[0076]
调整构件180、280可具有大致螺栓的形状。也就是说,调整构件180、280具有头部182、282和调整螺纹部分188、288。头部182、282就位于在其近端方向形成在通孔178、278中的开口中,并且调整螺纹部分188、288穿过通孔178、278并螺接至连接杆144、244的螺纹孔150、250。工具座190、290形成在头部182、282中,其可与工具(未示出)连接。此外,支撑部分186、286位于头部182、282与通孔178、278之间,并且在与通孔178、278内壁表面抵接的同时由其可旋转地支撑。另外,销座184、284围绕支撑部分186、286形成,使得穿过近端移动块170、270的销孔176、276插入的固定销192、194、固定销292、294的端部部分就位。结果,调整构件180、280能够旋转在适当位置。
[0077]
一对柱体108、208在厚度方向(也就是说,在朝向第二端板120、220的方向)形成在第一板部分104、204的两侧上。进一步地,延伸壁124、224能够按如下描述容纳其中的容纳凹部106、206围绕柱体108、208形成。另外,一对延伸壁124、224在厚度方向(也就是说,在朝向第一端板102、202的方向)形成在第二端板120、220的两侧上,并且柱体108、208能够插入和引导其中的凹部126、226形成在延伸壁124、224的内部。结果,当柱体108、208插入到凹部126、226中并竖直移动时,第一端板102、202和第二端板120、220在它们彼此靠近或彼此间隔开的方向的运动被阻止。
[0078]
此外,延伸壁124、224包括:第一壁1241、2241和第二壁1242、2242,其在第二端板120、220的纵向方向位于柱体108、208的前端和后端;以及第三壁1243、2243,其连接第一壁1241、2241和第二壁1242、2242,以形成柱体108、208插入到其中的凹部126、226。也就是说,延伸壁124、224形成为围绕柱体108、208,同时从顶部看时具有大致u形形状。
[0079]
第一壁1241、2241和第二壁1242、2242形成为具有小于一个值的厚度,该值将第二窗口138、238的横向长度从第二板部分122、222的横向长度排除。原因是第一壁1241、2241和第二壁1242、2242插入到第一端板102、202的容纳凹部106、206中。此外,柱体108、208可以形成为具有横向厚度,该横向厚度大于一个值的1/4倍且小于该值的1/2倍,该值将第一窗口118、218的横向长度从第一板部分104、204的横向长度排除。原因是柱体108、208通过柱体108、208插入到其中的凹部126、226的深度而加厚。
[0080]
此外,引导凹槽128、228可以形成在第一壁1241、2241和第二壁1242、2242中,以引导柱体108、208被插入到凹部126、226中。原因是柱体108、208的厚度大于第一壁1241、2241和第二壁1242、2242的厚度。
[0081]
此外,实施例1的脊柱融合器100和实施例2的脊柱融合器200在最低高度处相对于第一端板102、202和第二端板120、220具有不同的位置。
[0082]
实施例1的脊柱融合器100形成使得在其处于其最低状态时第一端板102的第一底部表面105抵接第二端板120的第二底部表面123。
[0083]
另一方面,实施例2的脊柱融合器200形成使得在其处于其最低状态时第一端板202的第一底部表面205抵接形成在第二端板220的第一壁2241和第二壁2242上的止挡件229。止挡件229从第一壁2241和第二壁2242突出,以便围绕第一端板202的第一底部表面
205的容纳凹部206抵接。
[0084]
结果,当实施例2的脊柱融合器200处于其最低状态时,第一端板202的第一底部表面205与第二端板220的第二底部表面223彼此间隔开。
[0085]
如同实施例2的脊柱融合器200,当其在最低状态下的高度高于实施例1的脊柱融合器100在最低状态下的高度时,要被插入到椎骨本体中的脊柱融合器200的长度是有限的,并且近端移动块270与远端移动块240的脊柱融合器200的纵向长度不变。因此,为了使调整构件280的驱动力保持在与实施例1相同的水平,第一块导轨至第八块导轨以及第一板导轨至第八板导轨的倾斜度应与实施例1的脊柱融合器100的相同。因此,第一端板202的第一底部表面205与第二端板220的第二底部表面223需彼此间隔开,并且实施例2的脊柱融合器还包括止挡件229。
[0086]
脊柱融合器100、200按以上的描述配置,且通过将诸如驱动器的工具插入到工具凹槽190、290中并在一个方向将它旋转,可以执行近端移动块170、270和远端移动块140彼此靠近的运动,因此,第一端板102、202和第二端板120、220彼此间隔开。相似地,通过插入工具并在另一个方向旋转,可以执行近端移动块170、270和远端移动块140、240彼此间隔开的运动,因此,第一端板102、202与第二端板120、220之间的距离减小。
[0087]
接下来,将参照图11至图25对根据本发明的实施例的器件持有器进行描述。
[0088]
具体地,将参照图11至图24对根据本发明的实施例的器件持有器300进行描述。
[0089]
us2017-02580605a公开了一种用于如图26至图29中所示的高度可调的器件的持有器400(在下文中,未示出)。us2017-02580605a使用了一种方法,在该方法中,将多个臂402插入到套管410中或从套管410突出的同时,将形成在臂402的端部上的突出件404安装在器件300的凹槽320中以固定器件300。然而,这种方法的问题是由于臂402通过其弹性延伸,持有器400在因反复使用或外科手术部位周围肌肉的阻塞与植入物302耦接的情况下而无法分离的可能性高。
[0090]
相反,器件持有器300可以与脊柱融合器接合,以将脊柱融合器以最低高度插在椎骨本体之间,并可在外科手术后与脊柱融合器可靠分离。再者,器件持有器300具有能够从视觉上指示脊柱融合器高度的变化量的特性。
[0091]
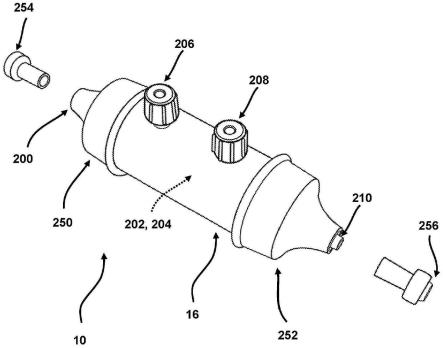
器件持有器300包括:主体302;持有本体304,其插入到主体302中以关于主体302相对移动,并具有一对从主体302的一端向外突出的端部执行器344和346;紧固件308,与持有本体304一体形成;和旋钮306,安装在主体302的另一端上,并在主体302的纵向方向可移动地耦接至紧固件308。
[0092]
端部执行器344和346形成在从持有本体304的一端分出的支腿330和332的端部,并且引导单元可以形成在主体302和支腿330和332的一端,以强制地引导支腿330和332。
[0093]
此外,驱动器310可插入穿过紧固件308和持有本体304的内部,并且紧固件308还可包括能够通过将驱动器的旋转量转换成其长度变化量来指示驱动器的旋转量的指示装置。
[0094]
引导单元和指示装置中的每一个或两者可以包括在器件持有器300中。
[0095]
如图16所示,主体302包括其中形成有主体孔326的主体管312,以及在其长度方向设置以便于清洁的一个或多个清洁孔314。主体管312具有:形成在其一端中的开口320,以与主体孔326连通;以及向外突出穿过开口320的端部执行器344和346。
[0096]
当从顶部看主体302时,开口320的端部部分以大致笔直的线形成,但可以根据脊柱融合器的近端部分的形状凹入地或凸起地形成。
[0097]
延伸部分316设置在主体管312的一侧上。膨胀部316从主体管312在宽度方向(与器件的宽度方向一致)增大,使得形成在支腿330和332端部的端部执行器344和346在宽度方向延伸。
[0098]
引导单元可以设置在延伸部分316侧上,并且可以包括:纵向形成在支腿330和332中的引导段,以及设置在主体302中并插入到引导段中的固定引导件。
[0099]
在本发明的实施例中,引导段形成为引导卡槽340和342,引导卡槽在支腿330和332的纵向方向伸长,竖直贯穿支腿,并且固定引导件是通过穿过引导卡槽340和342固定至主体302的引导销406和408。主体管312具有形成在其一端中的引导销孔318,引导销406和408插入到其中以安装。
[0100]
装配凹槽324形成在主体管312的另一端中,旋钮306装配至装配凹槽。此外,如图16所示,锁定钳口322远离装配凹槽324形成在主体管312另一端,锁定钳口用于防止旋钮306被移除。
[0101]
如图17和图18所示,持有本体304具有插入到主体302中的持有本体管328,并且其一端形成从分支点334分出的两个支腿330和332。支腿330和332具有形成在其外表面上的弯曲槽口336和338,从而用于增加弯曲量。
[0102]
端部执行器344和346设置在支腿330和332的端部以握紧器件。此外,引导卡槽340和342形成在如上文所描述的支腿330和332中。
[0103]
图19示出了支腿330和332布置在主体302的延伸部分316中的状态。在这种状态下,引导销406和408插入到形成在支腿330和332中的引导卡槽340和342中。因此,当持有本体304在其纵向方向朝向主体302的一端移动以增加端部执行器344和346的突出长度时,这对端部执行器344和346之间的间隙增大。另一方面,当持有本体304在其纵向方向从主体302的一端向后移动以减少端部执行器344和346的突出长度时,这对端部执行器344和346之间的间隙变窄。也就是说,可以通过上述引导销406和408以及引导卡槽340和342强制地增大或减小支腿330和332。
[0104]
耦接部分350形成在持有本体304的另一端,以被固定至紧固件308。耦接部分350可以通过使用诸如通过螺纹的螺接、焊接、使用销固定、环氧树脂粘合等公知技术的方法固定至持有本体304。
[0105]
如图20所示,旋钮306用于施加旋转力,以关于主体302移动持有本体304。为此,旋钮306包括:旋钮本体352,具有形成在其外周边上的不规则性,以便通过手便于握紧;装配阶状物354,形成在其内表面上,以被装配至主体302的装配凹槽324;以及旋钮螺纹356,形成在其内表面上,以与形成在下文要描述的紧固件308上的紧固件螺纹362螺接。旋钮306具有形成其中的旋钮孔358,以整体具有管状形状。
[0106]
如图21所示,紧固件308包括形成在其一端具有紧固件螺纹362的紧固件本体360和形成在其另一端的标记部分364。标记部分364是与紧固件308的紧固件孔368连通的管状本体,并且具有在纵向方向形成其中的多个标记部分卡槽366。标记部分364可以具有形成在紧固件孔368的内壁表面上的紧固件引导段370,移动指示器380插入到其中。
[0107]
此外,紧固件308可以具有形成在其外周边上的手柄耦接部分372,手柄392插到手
柄耦接部分以被固定。手柄392可以具有形成在其一端的连接卡头394(图14),附加的手柄耦接到连接卡头。
[0108]
能够指示长度的刻度显示在标记部分364的外周边上,并且当前器件的高度能够通过显示在移动指示器380上的标记指示。
[0109]
然后,运动转换杆376通过紧固件孔368插入到标记部分364中,以由旋转支撑环374可旋转地支撑。运动转换杆376具有形成在其外周边上的螺纹,并且该螺纹与形成在移动指示器380内周边上的移动指示器螺纹部分386螺接。如果形成在运动转换杆376上的螺纹的螺距与形成在器件的调整构件上的螺纹的螺距相同,则移动指示器380的运动量小并且难以从视觉上掌握。因此,运动转换杆376的螺纹大于调整构件的螺纹的螺距,或者具有多条螺纹线,以便扩增调整构件的导程。
[0110]
此外,移动指示器380具有围绕移动指示器本体382形成的运动指示突出件384,以便从待引导的标记部分卡槽366突出。
[0111]
最后,将移动指示器380插入到紧固件308的标记部分364中,并紧固保持器388以防止移动指示器380被移除。使用诸如螺接、焊接、环氧树脂粘合等已知技术将保持器388固定至标记部分364的端部。保持器388可以具有形成其中的保持器工具凹槽390,以与工具等接合。
[0112]
驱动器310插入穿过紧固件308和形成在持有本体304中的持有本体孔348。驱动器310可以具有形成在其轴396的一端的驱动尖端398,以与器件的调整构件接合。此外,驱动器310可以具有形成在其另一端对应于驱动器座378的驱动器耦接部分400,驱动器座形成在开口的内表面上,开口形成在运动转换杆376的运动转换杆孔410中。另外,驱动器310可以具有形成在其另一端的驱动器卡头404,以与手柄接合,驱动器卡头继续到驱动器耦接部分400,连接杆402介入其间。
[0113]
接下来,将关于主体302参照图13和图20对用于使持有本体304移动的驱动原理进行描述。
[0114]
耦接环412插入到主体302的装配凹槽324和旋钮306的装配阶状物354中,并固定至主体302的装配凹槽324和旋钮306的装配阶状物354。因此,主体302和旋钮306彼此固定,并且旋钮306关于主体302可旋转。持有本体管328的耦接部分350插入到紧固件308中,并固定至紧固件308。相应地,紧固件308和持有本体管328变成一体。然后,紧固件308的紧固件螺纹362与旋钮306的旋钮螺纹356彼此螺接。
[0115]
相应地,当旋转旋钮306时,旋钮螺纹356关于紧固件螺纹362旋转,从而允许主体302靠近紧固件308或与紧固件308间隔开。结果,与紧固件308一体形成的持有本体304向前和向后移动,并且形成在持有本体304的一端的支腿330和332也向前和向后移动。端部执行器344和346由于支腿330和332向前运动和向后运动进行的运动如上文所描述。
[0116]
接下来,将参照图14和图15对指示装置进行描述。指示装置包括:标记部分364,连接至紧固件308;运动转换杆376,其插入到标记部分364中并具有形成其中的驱动器座378,驱动器310就位于驱动器座上;和移动指示器380,其与运动转换杆376螺接,并通过形成在标记部分364中的标记部分卡槽366暴露在外,以便在旋转驱动器310时根据运动转换杆376的旋转沿标记部分卡槽366移动。
[0117]
当在驱动器耦接部分400与驱动器座378彼此接合的同时插入并旋转驱动器310
时,驱动器310的旋转被传递到运动转换杆376。然后,与运动转换杆376螺接的移动指示器380通过运动转换杆376的旋转进行移动。当移动指示器380的运动指示突出件384沿标记部分卡槽366在外侧移动时,当前器件的高度可以通过读取形成在标记部分364上的标记与运动指示突出件384的标记匹配的位置来确定。
[0118]
接下来,图25示出了脊柱融合器100与器件持有器300彼此接合的状态。器件持有器300从最低高度看靠近器件持有器300,从而允许端部执行器344和346位于在脊柱融合器100侧面上形成的接合部分166的周围。
[0119]
当旋转旋钮306以向后移动持有本体304时,端部执行器344和346插入到接合部分166中以固定脊柱融合器100。此时,由于开口320的形状对应于近端移动块170的形状,所以它们能够彼此紧密接触,因此可以防止脊柱融合器100晃动。
[0120]
接下来,将驱动器310插入到器件持有器300中,并将驱动器310的驱动尖端398接合至调整构件180的工具凹槽190。之后,当旋转驱动器310时,调整构件180旋转,从而允许近端移动块170和远端移动块140彼此靠近,以及如图25所示,第一端板102和第二端板120彼此间隔开。
[0121]
根据本发明的器件持有器300,可以将脊柱融合器插在相邻的椎骨本体之间,并且可以稳定地与器件分离,从而防止外科手术期间可能发生的事故。
[0122]
特别地,由于可从外科手术区域外部通过眼睛直接确认植入物之间的器件高度,因此可以准确地进行外科手术,使得其更适合经验不足的医生。
[0123]
虽然已参照优选实施例对本发明进行了描述,但相关领域的技术人员将会理解,在不脱离所附权利要求限定的本发明的范围的情况下,可以进行各种修改和改变。
[0124]
[工业适用性]
[0125]
根据本发明,在一定范围内具有不同高度的器件可以由一个器件代替,使得可以减轻库存和生产负担,减少外科手术期间的重复性工作,从而减少医生的工作。此外,由于还减少了手术时间,减少了出血量,所以显著缩短了患者的恢复时间,使得本发明的脊柱融合器可有望因上述优点而在相关领域得到广泛应用。
[0126]
[附图标记说明]
[0127]
100、200:脊柱融合器
[0128]
102、202:第一端板
[0129]
104、204:第一板部分
[0130]
105、205:第一底部表面
[0131]
106、206:容纳凹部
[0132]
108、208:柱体
[0133]
110、210:第一板凹部
[0134]
111、211:第一板导轨
[0135]
112、212:第二板导轨
[0136]
113、213:第三板导轨
[0137]
114、214:第四板导轨
[0138]
116、216:第二板凹部
[0139]
118、218:第一窗口
[0140]
120、220:第二端板
[0141]
122、222:第二板部分
[0142]
123、223:第二底部表面
[0143]
124、224:延伸壁
[0144]
126、226:凹部
[0145]
128、228:引导凹槽
[0146]
130、230:第三板凹部
[0147]
131、231:第五板导轨
[0148]
132、232:第六板导轨
[0149]
133、233:第七板导轨
[0150]
134、234:第八板导轨
[0151]
136、236:第四板凹部
[0152]
138、38:第二窗口
[0153]
140、240:远端移动块
[0154]
142、242:插入部分
[0155]
144、244:连接杆
[0156]
146、246:第一块凸出部
[0157]
148、248:第二块凸出部
[0158]
150、250:连接螺纹孔
[0159]
151、251:第一块导轨
[0160]
152、252:第二块导轨
[0161]
153、253:第三块导轨
[0162]
154、254:第四块导轨
[0163]
161、261:第五块导轨
[0164]
162、262:第六块导轨
[0165]
163、263:第七块导轨
[0166]
164、264:第八块导轨
[0167]
166、266:接合部分
[0168]
170、270:近端移动块
[0169]
172、272:第三块凸出部
[0170]
174、274:第四块凸出部
[0171]
176、276:销孔
[0172]
178、278:通孔
[0173]
180、280:调整构件
[0174]
182、282:头部
[0175]
184、284:销座
[0176]
186、286:支撑部分
[0177]
188、288:调整螺纹部分
[0178]
190、290:工具座
[0179]
192、194、292、294:固定销
[0180]
229:止挡件
[0181]
1241、2241:第一壁
[0182]
1242、2242:第二壁
[0183]
1243、2243:第三壁
[0184]
300:器件持有器
[0185]
302:主体
[0186]
304:持有本体
[0187]
306:旋钮
[0188]
308:紧固件
[0189]
310:驱动器
[0190]
312:主体管
[0191]
314:清洁孔
[0192]
316:引导单元
[0193]
318:引导销孔
[0194]
320:开口
[0195]
322:锁定钳口
[0196]
324:装配凹槽
[0197]
326:主体孔
[0198]
328:持有本体管
[0199]
330、332:支腿
[0200]
334:分支点
[0201]
336、338:弯曲槽口
[0202]
340、342:引导卡槽
[0203]
344、346:端部执行器
[0204]
348:持有本体孔
[0205]
350:耦接部分
[0206]
352:旋钮本体
[0207]
354:装配阶状物
[0208]
356:旋钮螺纹
[0209]
358:旋钮孔
[0210]
360:紧固件本体
[0211]
362:紧固件螺纹
[0212]
364:标记部分
[0213]
366:标记部分卡槽
[0214]
368:紧固件孔
[0215]
370:紧固件引导段
[0216]
372:手柄耦接部分
[0217]
374:旋转支撑环
[0218]
376:运动转换杆
[0219]
378:驱动器座
[0220]
380:移动指示器
[0221]
382:移动指示器本体
[0222]
384:运动指示突出件
[0223]
386:移动指示器螺纹部分
[0224]
388:保持器
[0225]
390:保持器工具凹槽
[0226]
392:手柄
[0227]
394:连接卡头
[0228]
396:轴
[0229]
398:驱动尖端
[0230]
400:驱动器耦接部分
[0231]
402:连接杆
[0232]
404:驱动器卡头
[0233]
406、408:引导销
[0234]
410:运动转换杆孔
[0235]
412:耦接环
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。