1.本发明属于植物检测技术领域,尤其涉及一种基于植株全三维信息的水分状况诊断方法及装置。
背景技术:
2.利用无损检测技术获取植物表型信息一直是研究的热点之一。早期的植物表型分析主要使用红、绿、蓝(rgb)成像技术作为分析植物性状的方法。随着成像传感器的发展,高光谱成像技术、红外热成像技术、三维成像技术、高分辨率成像技术和叶绿素荧光成像技术等被用于分析植物的结构及生理特征。
3.传统的rgb成像技术只能提供植物的结构信息,但叶片重叠,植物颜色与背景颜色相似,可见光和冠层阴影等一系列问题很容易影响rgb成像结果;高光谱成像技术在植物表型分析中非常有效且准确,但其检测过程中产生的大量数据在后续分析过程中较难处理,且高昂的设备费用进一步限制了技术的普及;红外热成像技术在比较植物冠层温度差异方面较为高效,但对于形态复杂的植物,热成像相机需要经过繁琐的校准及角度调整;叶绿素荧光成像技术在研究植物胁迫方面较为高效,但大多数叶绿素荧光图像研究仅限于盆栽作物的幼苗水平。
技术实现要素:
4.针对现有技术中存在不足,本发明提供了一种基于植株全三维信息的水分状况诊断方法及装置,实现植物三维叶绿素荧光图像和生理数据协同分析,使用便捷,检测过程自动化。
5.本发明是通过以下技术手段实现上述技术目的的。
6.一种基于植株全三维信息的水分状况诊断方法,具体为:
7.采集不同角度的植株冠层rgb图像和植株叶绿素荧光图像并进行分割,得到植株冠层rgb分割图和叶绿素荧光分割图,同时计算此时的冠层分布面积c
area
和叶绿素荧光参数etr;
8.对叶绿素荧光分割图和植株三维表型结构图像进行定位重构,得到植株叶绿素荧光三维重构图像;植株叶绿素荧光三维重构图像与植物根系ct图进行匹配定位,获取植株全三维叶绿素荧光重构图;
9.根据植株全三维叶绿素荧光重构图,获取植株叶片下垂角度、叶片数量、叶绿素荧光分布和根系分布情况,从而对植株水分状况进行综合判别,当植株可能处于缺水状态时,将叶绿素荧光参数etr、冠层分布面积c
area
、根系分布面积r
area
、土壤有效含水量t
aw
、易于被植物利用的土壤含水量r
aw
带入植株水分状况判断模型,判断植株水分状况;
10.所述植株水分状况判断模型为:
11.12.其中,d
ws
为植株土壤水分利用率,i
wstd
为植株土壤水分利用率,c
wd
为作物水分耗散量;
13.所述γ为公式系数;
14.所述i
wstd
=1-ks,ks为水分胁迫指数,dr为水分亏缺量。
15.进一步地,当d
ws
∈(0,0.1)时,植株为正常状态;d
ws
∈(0.1,0.4)时,植株为轻度缺水状态;d
ws
∈(0.4,0.7)时,植株为中度缺水状态;当d
ws
∈(0.7,1)时,植株为严重缺水状态。
16.进一步地,对植株水分状况进行综合判别,具体为:当叶片平均下垂角度大于预设值、叶片数量小于预设值、叶绿素荧光分布不规则和根系分布面积小于预设值出现一种或多种情况时,则植株可能处于缺水状态。
17.进一步地,所述预设值根据不同植物进行设置,所述叶绿素荧光分布不规则通过观察叶绿素荧光三维重构图获取。
18.进一步地,对叶绿素荧光分割图和植株三维表型结构图像进行定位重构,具体为:将叶绿素荧光分割图与植株三维表型结构图像相匹配的特征点的位置及尺度进行定位重构。
19.进一步地,所述不同角度的植株冠层rgb图像和植株叶绿素荧光图像,包括旋转平台(13)的旋转角度为0
°
、90
°
、180
°
和270
°
。
20.更进一步地,所述根系分布面积通过计算所述旋转角度的植株根系ct图的平均根系面积得到。
21.进一步地,所述土壤有效含水量t
aw
和易于被植物利用的土壤含水量r
aw
,是通过获取植株土壤不同深度的含水量,得到土壤浅层含水量θf和根系部位土壤含水量θi,由土壤浅层含水量θf计算土壤有效含水量t
aw
,由土壤有效含水量t
aw
计算易于被植物利用的土壤含水量r
aw
,所述t
aw
=θ
f-θ
wp
、r
aw
=pt
aw
,其中θ
wp
为土壤萎焉系数,p为大气蒸发力系数。
22.一种基于植株全三维信息的水分状况诊断装置,包括:
23.相机旋转平台,可移动设置在待测植株顶部,所述相机旋转平台底部安装有rgb相机、冠层叶绿素荧光成像仪和阵列光源;
24.叶绿素荧光成像仪,可移动设置在待测植株上部一侧;
25.三维扫描仪,可移动设置在待测植株上部另一侧;
26.x射线发射器和射线接收器,分别设置在待测植株下部两侧;
27.旋转平台,用于放置待测植物;
28.计算机,接收所述rgb相机、冠层叶绿素荧光成像仪、叶绿素荧光成像仪、三维扫描仪、x射线发射器和射线接收器采集的信息;
29.所述待测植物根部设有土壤含水量测定仪。
30.上述技术方案,还包括避光罩;
31.所述避光罩顶部设有顶部相机移动轨道,所述顶部相机移动轨道上安装相机旋转平台;
32.所述避光罩两侧均设有相机移动轨道,所述相机移动轨道上分别设有叶绿素荧光
成像仪和三维扫描仪;
33.所述x射线发射器和射线接收器均设置在避光罩底部。
34.本发明的有益效果为:本发明不仅能够根据植株全三维叶绿素荧光重构图中的植株叶片下垂角度、叶片数量、叶绿素荧光分布和根系分布情况对植株水分状况进行综合判别,而且可以结合植物冠层分布面积、植株叶绿素荧光参数、根系表型数据和土壤不同深度含水量进一步诊断植物水分状况,实现植株全三维叶绿素荧光重构图与植株生理信息协同分析,使得最终诊断结果更为精准。
附图说明
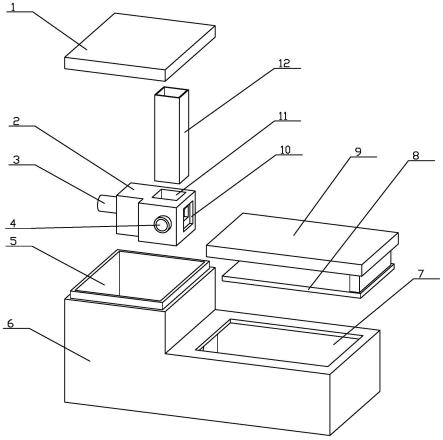
35.图1为本发明所述基于植株全三维信息的水分状况诊断装置结构示意图;
36.图2为本发明所述相机旋转平台结构示意图;
37.其中,1、避光罩;2、顶部相机移动轨道;3、相机旋转平台;4、冠层叶绿素荧光成像仪;5、rgb相机;6、左侧相机移动轨道;7、叶绿素荧光成像仪;8、右侧相机移动轨道;9、三维扫描仪;10、x射线发射器;11、射线接收器;12、土壤含水量测定仪;13、旋转平台;14、计算机;15、阵列光源。
具体实施方式
38.下面结合附图以及具体实施例对本发明作进一步的说明,但本发明的保护范围并不限于此。
39.如图1和图2所示,本发明基于植株全三维信息的水分状况诊断装置包括避光罩1,避光罩1顶部设有顶部相机移动轨道2,顶部相机移动轨道2上安装有相机旋转平台3,相机旋转平台3能够沿顶部相机移动轨道2进行移动,实现根据植物位置动态调整相机拍摄位置;冠层叶绿素荧光成像仪4、rgb相机5以及阵列光源15均安装于相机旋转平台3底部,冠层叶绿素荧光成像仪4和rgb相机5分别用于采集植株叶绿素荧光图像、冠层rgb图像,阵列光源15采用pwm控制,产生三种波长为460-470nm的不同强度的蓝色光,分别为:测量光(1μmol/m2/s)、光化光(500-3000μmol/m2/s)和饱和脉冲光(》4000μmol/m2/s)。
40.避光罩1两侧上部分别设有左侧相机移动轨道6、右侧相机移动轨道8,叶绿素荧光成像仪7安装于左侧相机移动轨道6上,实现不同高度植物叶片叶绿素荧光图像的检测;三维扫描仪9安装于右侧相机移动轨道8上,实现植株不同高度植株三维表型结构图像的采集。
41.避光罩1两侧底部安装有x射线发射器10和射线接收器11,通过发射x射线,采集植物根系ct图。
42.避光罩1的底部设有用于放置待测植物的旋转平台13,旋转平台13旋转植物,实现不同角度的检测。
43.待测植物根部设有土壤含水量测定仪12,用于测量土壤不同深度的含水量。
44.rgb相机5、冠层叶绿素荧光成像仪4、叶绿素荧光成像仪7、三维扫描仪9、x射线发射器10和射线接收器11均将采集的信息传输给计算机14,计算机14用于将采集到的植株图像进行三维重构及处理计算,得到植株全三维叶绿素荧光重构图和植株生理数据(包括植株叶片下垂角度、叶片数量、叶绿素荧光分布、根系分布面积、冠层分布面积和叶绿素荧光
参数),根据植株全三维叶绿素荧光重构图的表型信息结合植株水分状况判断模型协同诊断植物水分状况。
45.本实施例中:为了减少外部环境光的干扰,保证检测结果的准确,避光罩1采用不透光材料制成且内壁涂有吸光涂层;阵列光源15为圆环形构造,安装于相机旋转平台3上,以照射旋转平台上的植物。
46.本发明一种基于植株全三维信息的水分状况诊断方法,具体包括如下步骤:
47.步骤(1),将待测植物放置于旋转平台13上;
48.步骤(2),旋转角度为0
°
时,阵列光源15打开光化光照射25s,rgb相机5和冠层叶绿素荧光成像仪4分别采集此时植株冠层rgb图像、植株冠层叶绿素荧光图像,叶绿素荧光成像仪7采集植株叶片叶绿素荧光图像,三维扫描仪9采集植株三维表型结构图像,x射线发射器10和射线接收器11采集植株根系ct图;阵列光源15关闭光化光,打开饱和脉冲光持续700ms,采集此时植株冠层和植株叶片的叶绿素荧光图像。
49.步骤(3),在旋转角度分别为90
°
、180
°
、270
°
时,重复步骤(2),得到不同角度下的植株冠层rgb图像、叶绿素荧光图像、植株三维表型结构图像及根系ct图,并在旋转角度为360
°
时开始控制土壤含水量测定仪12插入土壤内,获取土壤不同深度的含水量,进一步得到土壤浅层含水量θf和根系部位土壤含水量θi,由土壤浅层含水量θf计算土壤有效含水量t
aw
(t
aw
=θ
f-θ
wp
,土壤萎焉系数θ
wp
为已知参数),由土壤有效含水量t
aw
计算易于被植物利用的土壤含水量r
aw
(r
aw
=pt
aw
,大气蒸发力系数p为已知参数)。
50.步骤(4),计算机14使用background matting图像分割算法分割植物冠层rgb图像及叶绿素荧光图像;
51.在background matting图像分割算法中,前景图像(即植物冠层rgb图像及叶绿素荧光图像)为f、预先载入的背景图为b、混合参数β,则输出图像i:
52.i=βf (1-β)b
53.同时在adobe数据集上进行监督训练,表达为:
[0054][0055]
当x={i,b,s,m}时混合参数β更为精准;
[0056]
其中:x为网络组合输入、为判别器网络的权重、s为软分割结果、m为前后帧序列,β
*
为训练图像中手动提取的物体对象图、为梯度算子、f
*
为训练图像中的前景图像、‖‖1为1-范数、为前景预测结果、为adobe数据集上的监督训练;
[0057]
同时采用最小二乘生成对抗网络(lsgan)训练的方法,对预先载入的背景图b和前景预测结果进行训练,得到生成网络的回归目标其中生成器的部分目标函数为:
[0058][0059]
其中:为lsgan训练、d为鉴别器网络、是生成由d鉴别的合成的给定背
景、μ为训练阈值、为对抗训练模拟的物体对象图、为对抗训练模拟的前景图、b
′
为训练背景图;
[0060]
且μ的初始值设为0.05,每两个训练周期μ的值减少1/2,训练结束后,得到的植株冠层rgb分割图和待三维重构的叶绿素荧光分割图;
[0061]
计算四个角度的植株冠层rgb分割图的平均冠层面积,得到此时的冠层分布面积c
area
;四个角度的叶绿素荧光分割图的叶片区域内灰度值求和后,除以叶片区域面积,得到对应的平均灰度值,最后对四个平均灰度值求平均值,得到叶绿素荧光参数etr;计算四个角度的植株根系ct图的平均根系面积,得到此时的根系分布面积r
area
。
[0062]
步骤(5),计算机14使用surf(speeded up robust features)算法并引入hessian矩阵,获取叶绿素荧光分割图与植株三维表型结构图像相匹配的特征点的位置及尺度,并进行定位重构,得到植株叶绿素荧光三维重构图像;使用sift(scale invariant feature transform)算法实现植株叶绿素荧光三维重构图像与植物根系ct图的特征点匹配定位,两者合成得到最终的植株全三维叶绿素荧光重构图。surf算法匹配点数不少于400个且匹配准确率达到91%以上,sift算法匹配点数不少于200个且匹配率达到90%以上。
[0063]
步骤(6),根据植株全三维叶绿素荧光重构图,获取植株叶片下垂角度、叶片数量、叶绿素荧光分布和根系分布情况,从而对植株水分状况进行综合判别,当出现叶片平均下垂角度大于预设值、叶片数量小于预设值、叶绿素荧光分布不规则(通过观察叶绿素荧光三维重构图)和根系分布面积小于预设值等一种或多种情况时(预设值根据不同植物进行设置),则植株可能处于缺水状态;
[0064]
当植株可能处于缺水状态时,将叶绿素荧光参数etr、冠层分布面积c
area
、根系分布面积r
area
、土壤有效含水量t
aw
、易于被植物利用的土壤含水量r
aw
带入植株水分状况判断模型:
[0065][0066]
其中,d
ws
为植株土壤水分利用率,i
wstd
为植株土壤水分利用率,c
wd
为作物水分耗散量;且作物水分耗散量c
wd
:
[0067][0068]
其中,γ为公式系数,c
area
为冠层分布面积,r
area
为根系分布面积;
[0069]
且植株土壤水分利用率i
wstd
:
[0070]iwstd
=1-ks,
[0071]
t
aw
=θ
f-θ
wp
,dr=θ
f-θi,r
aw
=pt
aw
[0072]
其中,ks为水分胁迫指数,t
aw
为土壤有效含水量,θf为土壤含水量,θ
wp
为土壤萎焉系数,dr为水分亏缺量,θi为根系部位土壤含水量,r
aw
为易于被植物利用的土壤含水量,p为大气蒸发力系数;
[0073]
当d
ws
∈(0,0.1)时,植株为正常状态;d
ws
∈(0.1,0.4)时,植株为轻度缺水状态;d
ws
∈(0.4,0.7)时,植株为中度缺水状态;当d
ws
∈(0.7,1)时,植株为严重缺水状态。
[0074]
所述实施例为本发明的优选的实施方式,但本发明并不限于上述实施方式,在不背离本发明的实质内容的情况下,本领域技术人员能够做出的任何显而易见的改进、替换或变型均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。