技术特征:
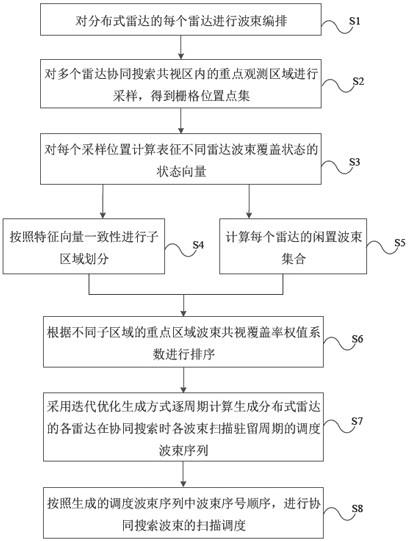
1.一种分布式雷达协同搜索波束的扫描方法,其特征在于,所述扫描方法包括以下步骤:步骤s1,对分布式雷达的每个雷达进行波束编排:设定个分布式部署的相控阵雷达的波束编排,每个所述相控阵雷达的波束序号记为 且,为每个所述相控阵雷达波束编排的最大波束序号,每个所述相控阵雷达相对于其阵面法线的方位角覆盖范围为,每个所述相控阵雷达中波束的方位角范围为,其中,为每个所述相控阵雷达覆盖范围最大的方位角,为所述波束的方位角下限,为所述波束的方位角上限;步骤s2,对多个雷达协同搜索共视区内的重点观测区域进行采样,得到栅格位置点集:对根据个所述相控阵雷达的协同搜索共视区确定的重点观测区域,按照预设的经纬度采样间隔进行采样,得到由多个位置点组成的栅格位置点集;步骤s3,对每个采样位置计算表征不同雷达波束覆盖状态的状态向量:计算所述栅格位置点集中的位置点被各个所述相控阵雷达的波束覆盖的状态参数,得到所述位置点的特征向量,其中,为位置点的编号,为所述位置点被第个所述相控阵雷达的波束覆盖的状态参数,,且的值为0到n之间的整数,为0表示所述位置点不被第个所述相控阵雷达的任何波束覆盖,不为0则表示所述位置点被第个所述相控阵雷达的第个波束覆盖;步骤s4,按照特征向量一致性进行子区域划分:按照各位置点的特征向量的一致性,将所述栅格位置点集划分为个子区域点集,使得同一个子区域点集内的所有位置点的特征向量相同,并分别得到子区域点集对应的特征向量;步骤s5,计算每个雷达的闲置波束集合:根据所述特征向量,计算每个所述相控阵雷达的闲置波束,得到各个所述相控阵雷达分别对应的闲置波束集合,其中,各个所述闲置波束集合分别包括对应的所述相控阵雷达的所有闲置波束的序号;步骤s6,根据不同子区域的重点区域波束共视覆盖率权值系数进行排序:根据基于所述重点观测区域和子区域点集确定的重点区域波束共视覆盖率,计算各个子区域点集的权值系数,并将各个子区域点集按照权值系数由大到小排序,得到排序后的子区域点集以及排序后的子区域点集对应的特征向量;步骤s7,采用迭代优化生成方式逐周期计算生成分布式雷达的各雷达在协同搜索时各波束扫描驻留周期的调度波束序列:将排序后的子区域点集及其对应的特征向量,以及各个所述相控阵雷达的所述闲置波束集合作为输入,按照迭代优化生成方式,逐周期计算协同搜索工作方式下第1~个波束扫描驻留周期的全部个所述相控阵雷达的发射波束序号,得到各个所述相控阵雷达分别对应的发射波束序号顺序;步骤s8,按照生成的调度波束序列中波束序号顺序,进行协同搜索波束的扫描调度:将个所述相控阵雷达按照对应的所述发射波束序号顺序,进行协同搜索波束的扫描调度。2.根据权利要求1所述的扫描方法,其特征在于,
所述重点观测区域由用户在个所述相控阵雷达的协同搜索共视区内指定;或者,所述重点观测区域为所述协同搜索共视区。3.根据权利要求1所述的扫描方法,其特征在于,所述预设的经纬度采样间隔为不大于雷达距离分辨率的1/10。4.根据权利要求1至3任一项所述的扫描方法,其特征在于,所述步骤s3包括:步骤s31,将位置点经纬高坐标通过坐标转换转至第个雷达的阵面坐标系,得到相对于阵面法线的方位角:根据预设的所述重点观测区域的平均高度,将所述位置点的经纬高坐标通过坐标转换方法转换至第个所述相控阵雷达的阵面坐标系,得到所述位置点相对于第个所述相控阵雷达阵面法线的方位角,其中,和分别表示所述位置点的纬度坐标和经度坐标;步骤s32,检测方位角处于第个雷达的波束范围,将波束号作为特征向量第个元素值,若该方位角不处于任何波束,则值为0:依次检测所述方位角是否处于第个所述相控阵雷达的波束范围内,若所述方位角处于所述波束的方位角范围内,则将所述位置点的状态参数赋值为;若所述方位角处于第个所述相控阵雷达的方位角覆盖范围之外,则将所述位置点的状态参数赋值为0。5.根据权利要求1至3任一项所述的扫描方法,其特征在于,所述步骤s5包括:对于第个所述相控阵雷达,若其波束满足,则波束为第个所述相控阵雷达的闲置波束,其中,表示第个子区域点集对应的特征向量的第个元素的值,。6.根据权利要求1至3任一项所述的扫描方法,其特征在于,所述步骤s6包括:步骤s61,对每个子区域点集求重点区域波束共视覆盖率:根据下式(1),分别计算每个子区域点集对应的重点区域波束共视覆盖率,其中,表示第个子区域点集对应的子区域面积,表示所述重点观测区域的面积,表示第个子区域点集对应的所述重点区域波束共视覆盖率:
ꢀꢀꢀ
(1)所述重点区域波束共视覆盖率的估计值表示为下式(2),其中,表示子区域点集的元素点的个数:
ꢀꢀꢀ
(2)步骤s62,根据特征向量求子区域点集被多个雷达共视时的共视层数:根据下式(3),计算子区域点集被多个所述相控阵雷达共视时的共视层数,其中,表示的l-0范数算子:
ꢀꢀꢀ
(3)步骤s63,按照共视层数对重点区域波束共视覆盖率的估计值进行重要性加权后得到
权值系数:根据所述共视层数,对所述重点区域波束共视覆盖率的估计值进行重要性加权,得到子区域点集的权值系数,其中,,表示所述共视层数对应的重要性系数,,且,。7.根据权利要求1至3任一项所述的扫描方法,其特征在于,所述步骤s7包括:步骤s71,设定当前的波束扫描驻留周期序号为1;步骤s72,根据排序后第一个权值系数最大子区域点集对应的特征向量、雷达闲置波束集合综合确定当前周期各雷达用于同时发射的调度波束序列:根据排序后的子区域点集中的第一个子区域点集对应的特征向量包括的各个所述相控阵雷达的波束序号,确定协同搜索工作方式下当前的波束扫描驻留周期中各所述相控阵雷达用于同时发射的调度波束序列,若排序后的第一个子区域点集对应的特征向量中的第个元素的值为0,则从第个所述相控阵雷达的闲置波束集合中随机选取一个元素的值作为第个所述相控阵雷达的发射波束序号,若为空集,则依次遍历特征向量,直到寻找到其中一个特征向量中的第个元素的值不为0,将该第个元素的值作为第个所述相控阵雷达的发射波束序号;步骤s73,根据已安排的调度波束序列,对排序后的子区域点集进行剔除操作:对子区域点集,若其对应的特征向量中第个元素代表的波束序号已出现在以往波束扫描驻留周期第个所述相控阵雷达的调度波束序列中,则将子区域点集剔除,得到新的排序后的子区域点集;步骤s74,将波束扫描驻留周期序号加1,判断当前的波束扫描驻留周期是否大于;若是,则生成个波束扫描驻留周期的个所述相控阵雷达的调度波束序列,得到各个所述相控阵雷达分别对应的发射波束序号顺序;若否,则重复步骤s72至步骤s74,直至当前的波束扫描驻留周期大于。8.一种分布式雷达协同搜索波束的扫描装置,其特征在于,所述装置包括:编排模块,用于对分布式雷达的每个雷达进行波束编排:设定个分布式部署的相控阵雷达的波束编排,每个所述相控阵雷达的波束序号记为且,为每个所述相控阵雷达波束编排的最大波束序号,每个所述相控阵雷达相对于其阵面法线的方位角覆盖范围为,每个所述相控阵雷达中波束的方位角范围为,其中,为每个所述相控阵雷达覆盖范围最大的方位角,为所述波束的方位角下限,为所述波束的方位角上限;采样模块,用于对多个雷达协同搜索共视区内的重点观测区域进行采样,得到栅格位置点集:对根据个所述相控阵雷达的协同搜索共视区确定的重点观测区域,按照预设的经纬度采样间隔进行采样,得到由多个位置点组成的栅格位置点集;第一计算模块,用于对每个采样位置计算表征不同雷达波束覆盖状态的状态向量:计算所述栅格位置点集中的位置点被各个所述相控阵雷达的波束覆盖的状态参数,得到所述位置点的特征向量,其中,为位置点的编号,为所述位置点被第个所述相控阵雷达的波束覆盖的状态参数,,且的值为0到n之间的
整数,为0表示所述位置点不被第个所述相控阵雷达的任何波束覆盖,不为0则表示所述位置点被第个所述相控阵雷达的第个波束覆盖;划分模块,用于按照特征向量一致性进行子区域划分:按照各位置点的特征向量的一致性,将所述栅格位置点集划分为个子区域点集,使得同一个子区域点集内的所有位置点的特征向量相同,并分别得到子区域点集对应的特征向量;第二计算模块,用于计算每个雷达的闲置波束集合:根据所述特征向量,计算每个所述相控阵雷达的闲置波束,得到各个所述相控阵雷达分别对应的闲置波束集合,其中,各个所述闲置波束集合分别包括对应的所述相控阵雷达的所有闲置波束的序号;排序模块,用于根据不同子区域的重点区域波束共视覆盖率权值系数进行排序:根据基于所述重点观测区域和子区域点集确定的重点区域波束共视覆盖率,计算各个子区域点集的权值系数,并将各个子区域点集按照权值系数由大到小排序,得到排序后的子区域点集以及排序后的子区域点集对应的特征向量;第三计算模块,用于采用迭代优化生成方式逐周期计算生成分布式雷达的各雷达在协同搜索时各波束扫描驻留周期的调度波束序列:将排序后的子区域点集及其对应的特征向量,以及各个所述相控阵雷达的所述闲置波束集合作为输入,按照迭代优化生成方式,逐周期计算协同搜索工作方式下第1~个波束扫描驻留周期的全部个所述相控阵雷达的发射波束序号,得到各个所述相控阵雷达分别对应的发射波束序号顺序;调度模块,用于按照生成的调度波束序列中波束序号顺序,进行协同搜索波束的扫描调度:将个所述相控阵雷达按照对应的所述发射波束序号顺序,进行协同搜索波束的扫描调度。9.一种电子设备,其特征在于,包括:至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1至7中任一项所述的分布式雷达协同搜索波束的扫描方法。10.一种计算机可读存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的分布式雷达协同搜索波束的扫描方法。
技术总结
本公开涉及雷达探测技术领域,提供一种分布式雷达协同搜索波束的扫描方法及装置,方法包括:对分布式雷达的每个雷达进行波束编排;对多个雷达协同搜索共视区内的重点观测区域进行采样,得到栅格位置点集;对每个采样位置计算表征不同雷达波束覆盖状态的状态向量;按照特征向量一致性进行子区域划分;计算每个雷达的闲置波束集合;根据不同子区域的重点区域波束共视覆盖率权值系数进行排序;采用迭代优化生成方式逐周期计算生成分布式雷达的各雷达在协同搜索时各波束扫描驻留周期的调度波束序列;按照生成的调度波束序列中波束序号顺序,进行协同搜索波束的扫描调度。本公开降低了协同处理难度,提高了协同探测性能。提高了协同探测性能。提高了协同探测性能。
技术研发人员:韩阔业 宋扬 刘光宏 葛建军 吕文超
受保护的技术使用者:中国电子科技集团公司信息科学研究院
技术研发日:2022.04.20
技术公布日:2022/6/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。