1.本发明涉及微环境因素监测技术领域,具体涉及一种试样表面微环境因素监测装置及其监测方法。
背景技术:
2.研究表明,各类自然环境因素对材料的腐蚀损伤效应都是从材料表面开始发生,或是从材料表面液膜开始传导,材料及其产品在大气环境中,由于毛细管作用、吸附作用或者化学凝聚作用,环境中的温度、水份、可溶性盐离子和各种腐蚀性介质冷凝在材料表面,形成表面微环境。表面微环境的存在,改变了材料及其产品的表面电化学状态,使局部区域形成腐蚀原电池,产生了腐蚀电流,从而促进腐蚀发生发展。因此,研究产品表面微环境对材料腐蚀行为的影响至关重要。
3.然而,现有的绝大多数腐蚀环境观测研究,仅停留在外部大气环境层面,都是观测大气环境温度、相对湿度、大气污染物浓度等环境参量,忽视了对材料表面环境微环境的观测,单一大气环境的观测已经无法满足对日趋复杂环境下腐蚀与防护的需求。
4.某项关于材料表面环境微环境的研究中,提供了一种大气环境下材料表面相对湿度检测装置,包括用于放置样品的样品台,样品台附近设置有支架,在支架上设置有用于监测环境温度的温度传感器,用于监测大气相对湿度的相对湿度传感器,以及用于监测样品表面温度的红外热成像仪;采用该方案能够获取材料表面的相对湿度,但其无法监测材料表面环境微环境演变情况。
技术实现要素:
5.在现有研究的基础上,本发明目的在于提供一种(平板)试样表面微环境因素监测装置及其监测方法,以便于快速、准确监测材料表面环境微环境演变情况。
6.为了实现上述目的,本发明采用如下所述技术方案。
7.一种试样表面微环境因素监测装置,包括样品台和放置在样品台上的试样,试样被测表面为平面,在样品台附近设置有支架,在副支架上设置有用于检测试样被测表面特定元素含量的x射线发射器及其与之配套的探测器,x射线发射器与探测器对称布置,其特征在于:在副主支架上设置有用于检测试样被测表面液膜厚度的光纤传感器,光纤传感器的轴线垂直于试样被测表面并与x射线发射器轴线、探测器轴线三者交汇于试样被测表面的同一点。
8.进一步地,在样品台上方还设置有监测试样被测表面温度的红外热成像仪,试样被测表面整体位于红外热成像仪的视野范围内,红外热成像仪位于试样正上方并固定在主支架上。
9.进一步地,光纤传感器、x射线发射器及其探测器固定在副支架上,副支架固定在二维移动机构上,二维移动机构设置在主支架上,借助于移动二维移动机构将检测点移动至试样被测表面的任一坐标位置。
10.进一步地,所述试样包括多根竖向靠近排列的杆式温度传感器,所有杆式温度传感器穿设并固定在限位板上,所有杆式温度传感器顶端位于同一平面,所有杆式温度传感器顶部外围设有粘接层,由粘接层顶面和所有杆式温度传感器前端共同构成的平面试样被测表面。采用这样地结构,巧妙地借助于温度传感器和粘接层模拟试样的被测表面,便于在无需使用红外热成像仪和无需实施坐标转换的情况下快速获得被测点位的温度、坐标。
11.作为优选,所述粘接层采用无氯粘接剂和金属粉末/二氧化硅粉末固结而成。
12.作为优选,所述杆式温度传感器的直径不大于2mm,所述杆式温度传感器顶部为球面。
13.进一步地,所述装置还包括与红外热成像仪、光纤传感器、x射线发射器及其探测器、二维移动机构相连的计算机控制系统,计算机控制系统包括存储器、处理器及存储在存储器上并可在处理器上运行的程序;所述处理器执行所述程序时实现:控制二维移动机构移动至目标位置;实时获取并存储红外热成像仪采集到的试样被测表面监测点的温度ts、氯元素含量和液膜厚度,并输出监测结果。
14.进一步地,一种前述装置的试样表面微环境因素监测方法,其特征在于,步骤包括:步骤1,采用红外热成像仪获取试样被测表面的温度,采用布置在试样被测表面上方5-10cm处的温度传感器获取环境温度,当监测到该环境温度介于1-25℃之间且试样被测表面某点(a)的温度只低于环境温度1-2℃时,将该点(a)所在位置作为目标位置;步骤2,获取目标位置的坐标;步骤3,控制二维移动机构移动至目标位置,此时,光纤传感器的轴线、x射线发射器轴线、探测器轴线三者交汇于该目标位置;步骤4,获取目标位置的温度ts、氯元素含量和液膜厚度,并输出监测结果;步骤5,在其它区域多次执行步骤1-4,并输出监测结果;步骤6,监测结束后,依据监测结果生成图形。
15.进一步地,一种采用前述装置的试样表面微环境因素监测方法,其特征在于,所述装置还包括布置在试样被测表面上方5-10cm处的温度传感器h,与温度传感器h、杆式温度传感器、光纤传感器、x射线发射器及其探测器、二维移动机构相连的计算机控制系统,计算机控制系统包括存储器、处理器及存储在存储器上并可在处理器上运行的程序;所述处理器执行所述程序时实现:控制二维移动机构移动至目标位置;实时获取并存储温度传感器h采集到的环境温度,以及杆式温度传感器采集到的试样被测表面监测点的温度ts、氯元素含量和液膜厚度,并输出监测结果;其步骤包括:步骤1,采用杆式温度传感器获取试样被测表面的温度,采用布置在试样被测表面上方5-10cm处的温度传感器获取环境温度,当监测到该环境温度介于1-25℃之间且试样被测表面某点(a)的温度只低于环境温度1-2℃时,将该点(a)所在位置作为目标位置;步骤2,获取目标位置的坐标;步骤3,控制二维移动机构移动至目标位置,此时,光纤传感器的轴线、x射线发射器轴线、探测器轴线三者交汇于该目标位置;步骤4,获取目标位置的温度ts、氯元素含量和液膜厚度,并输出监测结果;
步骤5,在其它区域多次执行步骤1-4,并输出监测结果;步骤6,监测结束后,依据监测结果生成图形。
16.进一步地,预先根据每个杆式温度传感器顶点位置标定好试样被测表面的所有坐标点并存储在计算机系统中。
17.有益效果:采用本发明方案,不仅可自动、快速、高效的监测材料表面温度、液膜厚度、表面元素含量等多种为环境因素,并可实时监测产品表面微环境因素的变化,监测结果稳定可靠,有利于为腐蚀环境数据的精准观测提供可靠依据,而且便于快速、准确监测材料表面任一位置的微环境及材料表面微环境演变情况,适用于多种大气环境,具有广阔的应用前景和潜在的经济效益。
附图说明
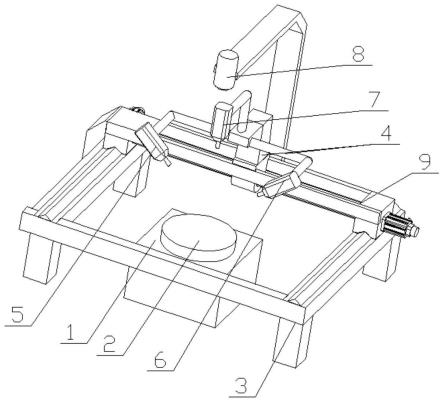
18.图1是实施例1中试样表面微环境因素监测装置局部示意图;图2是图1的主向示意图;图3是图1的俯向示意图;图4是实施例2中试样表面微环境因素监测装置局部示意图;图5是实施例2中试样表面微环境因素监测装置的试样截面示意图;图6是实施例中监测材料表面微环境的过程(局部)示意图。
具体实施方式
19.下面结合附图和具体实施例对本发明作进一步说明,但以下实施例的说明只是用于帮助理解本发明的原理及其核心思想,并非对本发明保护范围的限定。应当指出,对于本技术领域普通技术人员来说,在不脱离本发明原理的前提下,针对本发明进行的改进也落入本发明权利要求的保护范围内。
20.实施例1参见图1-图3所示,一种试样(平板试样)表面微环境因素监测装置,包括样品台1和放置在样品台1上的试样2(取实际产品的局部作为试样,定义为实物试样),试样2被测表面为平面,在样品台1附近设置有支架(主支架3和副支架4组成),在副支架4上设置有用于检测试样2被测表面特定元素含量的x射线发射器5及其与之配套的探测器6,x射线发射器5与探测器6对称布置,在副支架4上设置有用于检测试样2被测表面液膜厚度的光纤传感器7,光纤传感器7的轴线垂直于试样2被测表面并与x射线发射器5轴线、探测器6轴线三者交汇于试样2被测表面的同一点;在样品台1上方还设置有监测试样2被测表面温度的红外热成像仪8,试样2被测表面整体位于红外热成像仪8的视野范围内,红外热成像仪8位于试样2正上方并固定在主支架3上。其中,副支架4固定在二维移动机构9上,二维移动机构9设置在主支架3上,借助于移动二维移动机构9将检测点移动至试样2被测表面的任一坐标位置。其中,二维移动机构9包括两组垂直布置的精密丝杠传动机构,精密丝杠传动机构的电机采用伺服电机,包括用于驱动第一丝杠12动作和副支架4横向移动的第一伺服电机11,用于驱动第二丝杠13动作和副支架4纵向移动的第二伺服电机15,副支架4固定在第一丝杠12的活动座上,第一丝杠12转动时,副支架4和活动座沿着第一丝杠12轴向方向同步移动;副支架4、第一丝杠12及其安装座整体通过第二活动座14配合在第二丝杠13上,第二丝杠13转动时,
副支架4、第一丝杠12及其安装座整体沿着第二丝杠13轴向方向同步移动。其中,x射线发射器5与探测器6、光纤传感器7尽量靠近试样2设置,x射线发射器5的靶材为ag、au、w或rh,发射电压为0~70kv,发射电流1~200μa;x射线探测器6的窗口材料为be或者c,有效探测面积为10~70mm2,元素含量观测分辨率优于10μg/cm2,光纤传感器7的测量范围为0~1000μm,厚度分辨率优于100nm,红外热成像仪8的温度分辨率优于0.5℃,温度测量范围为-20 ~120oc。
21.本实施例中,试样2放在样品台1上,x射线发射器、探测器6到试样2表面的直线距离为1cm,光纤传感器5探头前端距试样2表面的垂直距离为1cm,红外热成像仪8探头前端距试样2表面的垂直距离为30cm。
22.本实施例中,所述装置还包括布置在试样2被测表面上方5-10cm处的温度传感器h,与温度传感器h、杆式温度传感器21、光纤传感器7、x射线发射器5及其探测器6、二维移动机构相连的计算机控制系统,计算机控制系统包括存储器、处理器及存储在存储器上并可在处理器上运行的程序;所述处理器执行所述程序时实现:控制二维移动机构移动至目标位置;实时获取并存储温度传感器h采集到的环境温度,以及杆式温度传感器21采集到的试样2被测表面监测点的温度ts、氯元素含量和液膜厚度,并输出监测结果;一种使用本实施例中装置的试样表面微环境因素监测方法,步骤包括:步骤1,采用红外热成像仪8获取试样2被测表面的温度,采用布置在试样2被测表面上方5-10cm处的温度传感器h获取环境温度,当监测到环境温度介于1-25℃之间且试样2被测表面某点a的温度只低于环境温度1-2℃时,将该点所在位置作为目标位置;步骤2,获取目标位置的坐标;本步骤中,可以借助于机器视觉的坐标标定方法获取目标位置的坐标,也可以借助于温变点距本地坐标系原点的像素点和坐标转换关系来计算获取目标位置的坐标;步骤3,控制二维移动机构移动至目标位置,此时,光纤传感器7的轴线、x射线发射器5轴线、探测器6轴线三者交汇于该目标位置;步骤4,获取目标位置的温度ts、氯元素含量和液膜厚度,并输出监测结果;步骤5,在其它区域多次执行步骤1-4,并输出监测结果;步骤6,监测结束后,依据监测结果生成图形。
23.实施例2一种试样表面微环境因素监测装置,参照实施例1并结合图4和图5所示,其与实施例1的主要区别在于省去了红外热成像仪8及改变了试样结构,采用制备的特定试样以借助于温度传感器和粘接层模拟试样的被测表面,具体如下:如图5所示,所述试样2包括多根竖向靠近排列的直径为2mm的杆式温度传感器21,所有杆式温度传感器21规格相同,且所述杆式温度传感器21顶部为球面,所有杆式温度传感器21穿设并固定在限位板22上,所有杆式温度传感器21顶端位于同一平面,所有杆式温度传感器21顶部外围设有粘接层23,由粘接层23顶面和所有杆式温度传感器21前端共同构成试样2被测表面为平面,粘接层23采用无氯粘接剂和金属粉末(该粉末采用与实物试样成分相同的粉末)固结而成,该试样2制备完成后需要对其表面打磨,使其表面粗糙度与实施例1中实物试样的表面粗糙度相同;所述装置还包括布置在试样2被测表面上方5-10cm处的温度传感器h,与温度传感器h、杆式温度传感器21、光纤传感器7、x射线发射器5及其探测器6、二维移动机构相连的计
算机控制系统,计算机控制系统包括存储器、处理器及存储在存储器上并可在处理器上运行的程序;所述处理器执行所述程序时实现:控制二维移动机构移动至目标位置;实时获取并存储温度传感器h采集到的环境温度,以及杆式温度传感器21采集到的试样2被测表面监测点的温度ts、氯元素含量和液膜厚度,并输出监测结果;该装置的计算机控制系统中存储有预先根据每个杆式温度传感器21顶点位置标定好试样2被测表面的所有坐标点,例如:当试样2是由固定在限位板22上的100个杆式温度传感器21(直径2mm,相邻杆式温度传感器21之间的间距为1mm)及其粘接层23构成的正方形结构时,共设置十排,每排10个杆式温度传感器21,加上边沿尺寸6mm(3mm 3mm),那么其长度和宽度均为35mm;若是对所有杆式温度传感器21进行编码/编号,并以试样2其中一个角定义为坐标原点,从该角延伸的边线定义为x轴和y轴,那么据此建立的平面坐标系上的每个杆式温度传感器21顶点就对应唯一坐标值,此种情况下,距离坐标原点最近的那个杆式温度传感器21(称之为传感器c1)顶点的坐标为(4mm,4mm),与传感器c1相邻并沿着x轴前移的那个杆式温度传感器(称之为传感器c2)顶点的坐标为(7mm,7mm)
……
距离坐标原点最远的那个杆式温度传感器21(称之为传感器c100)顶点的坐标为(31mm,31mm),将每次杆式温度传感器21的编号/编码及其坐标点组成的数据库存储在计算机控制系统中,以在使用时进行读取、调用。
24.采用本实施例中装置的试样表面微环境因素监测方法,步骤包括:步骤1,采用杆式温度传感器21获取试样2被测表面的温度,采用布置在试样2被测表面上方5-10cm处的温度传感器h获取环境温度,当监测到环境温度介于1-25℃之间且试样2被测表面某点a的温度只低于环境温度1-2℃时,将该点所在位置作为目标位置;步骤2,获取目标位置的坐标;步骤3,控制二维移动机构移动至目标位置,此时,光纤传感器7的轴线、x射线发射器5轴线、探测器6轴线三者交汇于该目标位置;步骤4,获取目标位置的温度ts、氯元素含量和液膜厚度,并输出监测结果;步骤5,在其它区域多次执行步骤1-4,并输出监测结果;步骤6,监测结束后,依据监测结果生成图形。
25.在步骤1中,若是同时监测到多个点位的温度都只低于环境温度1-2℃时,则取温度最高的点所在位置作为目标位置;若是同时监测到多个点位的温度只低于环境温度1-2℃且所有点位温度相同时,则将其均作为目标位置并依序执行步骤3-步骤5。在步骤5中,所述的其它区域是指未被监测过的点位或位置,例如当某点a已被监测过,即使下次监测到其温度只低于环境温度1-2℃则不执行步骤2-步骤5,而是寻找新的目标位置。
26.使用过程中,如图6所示,当首先监测到试样2被测表面某点a的温度只低于环境温度1-2℃时,将该点a所在位置作为目标位置,并读取到点a的杆式温度传感器编号/编码及其坐标点为,(19mm,13mm),然后控制二维移动机构移动至点a,此时,光纤传感器7的轴线、x射线发射器5轴线、探测器6轴线三者交汇于点a,然后获取该位置的温度ts、氯元素含量和液膜厚度,并输出监测结果;接着,当监测到试样2被测表面点b的温度只低于环境温度1-2℃时,将该点b所在位置作为目标位置,并读取到点b的杆式温度传感器编号/编码及其坐标点为(13mm,19mm),然后控制二维移动机构移动至点b,此时,光纤传感器7的轴线、x射线发射器5轴线、探测器6轴线三者交汇于点b,然后获取该位置的温度ts、氯元素含量和液膜厚
度,并输出监测结果;接着,当监测到试样2被测表面点c的温度只低于环境温度1-2℃时,将该点c所在位置作为目标位置,并读取到点c的杆式温度传感器编号/编码及其坐标点为(16mm,25mm),然后控制二维移动机构移动至点c,此时,光纤传感器7的轴线、x射线发射器5轴线、探测器6轴线三者交汇于点c,然后获取该位置的温度ts、氯元素含量和液膜厚度,并输出监测结果
…
以此进行下去,当监测结束后,依据监测结果生成图形。后续工作中,本领域技术人员则可结合每个时间点或时间段对应的特定位置的温度ts、氯元素含量和液膜厚度参数来评估材料表面微环境演变情况。例如,点b先发生温度降低并只低于环境温度1-2℃,且监测到其液膜厚度较大、氯离子含量也明显较高,则可表面该点c属于腐蚀倾向性较大的位置,随后监测到点c发生温度降低并只低于环境温度1-2℃,且监测到其液膜厚度较大、氯离子含量也明显较高,则可表面该点c属于腐蚀倾向性较大的位置,结合时间的先后顺序,则可初步判断具有腐蚀倾向的微环境从b点延伸到c点。
27.实际应用过程中,监测到试样2被测表面某点的温度只低于环境温度1-2℃时,是指环境温度与被测表面某点温度的差值为1-2℃,例如,海南某地区的不锈钢表面生成液膜的区域温度为t1,对应的其环境温度为t1 1℃~t1 2℃,甘肃某地区的不锈钢表面生成液膜的区域温度为t2,对应的其环境温度为t2 1℃~t2 2℃。
28.采用本发明方案,不仅可自动、快速、高效的监测材料表面温度、液膜厚度、表面元素含量等多种为环境因素,并可实时监测产品表面微环境因素的变化,监测结果稳定可靠,有利于为腐蚀环境数据的精准观测提供可靠依据,而且便于快速、准确监测材料表面任一位置的微环境及材料表面微环境演变情况,且有利于进一步分析材料表面腐蚀倾向演变情况,适用于多种大气环境,具有广阔的应用前景和潜在的经济效益。
29.实施例3一种试样表面微环境因素监测装置,参照实施例2,其与实施例2的主要区别在于:所述粘接层采用无氯粘接剂和二氧化硅粉末固结而成。
30.对于实施例2中的方案,巧妙地借助于杆式温度传感器和粘接层模拟试样的被测表面,便于在无需使用红外热成像仪和无需实施坐标转换的情况下快速获得被测点位的温度、坐标,相比于实施例中方案进一步降低了设施成本,进一步提高了监测效率和准确性,且其杆式温度传感器顶端既能够作为准确表征坐标的点,又能够作为监测点位的中心。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。