1.本发明涉及模型模拟开发,更具体地涉及对有限元模型中的各部件之间的无约束运动和低刚度连接的检测。
背景技术:
2.建模机械系统的正则模态分析确定了模型的特征振动形状(正则模态)和相应的固有频率。有限元模型中的各部件之间的无约束或低刚度连接可能表明有限元模型没有对机械系统的至少一个特征进行适当地考虑。因此,期望对有限元模型中的这种模态进行快速检测和校正。
3.在对机械系统的有限元模型进行测试时,尤其是在初始测试期间,可能很难检测并且识别部件之间的无约束或低刚度连接。系统地确定有限元模型各部件之间的无约束或低刚度连接的常用方法包括对有限元模型的固有频率提取进行模拟,以识别具有零频率的变形模态。例如,在simulia用户协助文档部分“有限元分析》分析》分析程序》动态应力/位移分析》固有频率提取”(abaqus》analysis》analysis procedures》dynamic stress/displacement analysis》natural frequency extraction)中对有限元模型的固有频率提取进行了讨论。
4.用于系统地确定有限元模型各部件之间的无约束或低刚度连接的另一种方法是对有限元模型的刚度矩阵进行奇异值分解。例如,在https://en.wikipedia.org/wiki/singulal_value_decomposition中对奇异值分解技术进行了讨论。用于系统地确定有限元模型各部件之间的无约束或低刚度连接的第三种方法涉及对来自有限元模型的刚度矩阵的下-上(lu)分解的奇异点进行探讨。例如,在https://en.wikipedia.org/wiki/lu_decomposition中对lu分解进行了讨论。在https://help.solidworks.com/2020/english/solidworks/cworks/hidd_contact_visualiza tion_plot.htm中讨论了提供lu分解工具的商业建模平台的一个示例。
5.遗憾的是,每种方法都需要大量的计算时间和资源。例如,有限元模型通常涉及n
×
n刚度矩阵,其中,“n”为数百万个,因此,所列出的应用于n
×
n方程组的方法的计算时间可能超过一个小时。此外,大多数有限元分析人员在进行预期的模拟之前,通常不执行固有频率提取或奇异值分解以检查各部件之间是否存在任何无约束或低刚度连接。
6.确定有限元模型中的各部件之间的无约束或低刚度连接的一种后退方法是,分析人员试图运行所期望的静态或其他模拟,该模拟要么以关于奇异模型的不明确的消息而中止,要么可能报告不切实际的解决方案。在诊断问题的过程中,分析人员可能最终确定问题的根源是无约束的位移模态。因此,在该行业中有必要解决这些缺点中的一个或多个缺点。
技术实现要素:
7.本发明的实施例提供了一种用于对有限元建模中的各部件之间的无约束运动和低刚度连接进行快速检测的方法。在有限元建模中,各部件之间的无约束运动和低刚度连
接通常会产生问题。使有限元分析人员快速地注意到这些模态(或自动地解析这些问题)增加了有限元建模软件的可用性和鲁棒性。
8.简要地描述,本发明涉及一种由计算机实现的方法,该方法被配置为对与计算机辅助绘图(cad)应用中的初始有限元(fe)模型的各部件之间的无约束运动和低刚度连接相关联的模态进行检测。将初始有限元模型的刚度矩阵变换为约化(reduced)刚度矩阵,并且确定了与约化刚度矩阵相关联的奇异模态与相应奇异值的集合。任何具有相应零(或非常小的)奇异值的奇异模态被识别为与fe模型的无约束模态相对应。对于要求注意到具有与各部件之间的低刚度连接相关联的模态的用户,该软件还将识别具有低奇异值的奇异模态。这些模态能够以图形的形式引起用户的注意。可选地,可以自动地调用稳定化方法以克服各部件之间的无约束运动或增加各部件之间的连接刚度。
9.在对以下附图和详细说明进行研究后,本发明的其他系统、方法和特征对于本领域的普通技术人员来说将是显而易见的。旨在将所有这些附加系统、方法和特征包括在本说明书中,处于本发明的范围内并且受所附权利要求的保护。
附图说明
10.包括附图以提供对本发明的进一步理解,并且,附图被结合在本说明书中并构成本说明书的一部分。附图中的组件不一定按比例,重点在于清楚地说明本发明的原理。附图示出了本发明的实施例,并且,附图用于与说明书共同解释本发明的原理。
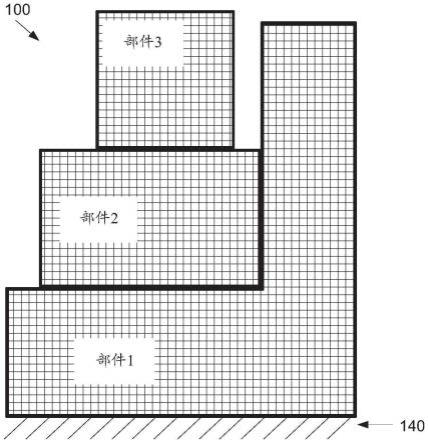
11.图1a是在本发明的第一个示例性实施例下的三部件组件的有限元表示的示意图。
12.图1b是图1a的有限元表示的约化系统表示的示意图。
13.图2是用于将图1a的原始有限元模型的原始刚度矩阵变换为用于图1b的约化系统的约化刚度矩阵的一种示例性方法的流程图。
14.图3是示出了单个接触约束(individual contact constraint)的一个示例的示意图。
15.图4是用于fe建模的方法的一个示例性实施例的流程图400。
16.图5是详细说明图4的方法中对奇异模态进行识别的步骤的流程图。
17.图6是示出了用于执行本发明的功能的系统的一个示例的示意图。
具体实施方式
18.本发明的实施例提供了一种用于在模拟之前,对各部件之间的无约束运动和低刚度连接进行识别的低计算方法。
19.以下定义对于解释应用于本文所公开的实施例的特征的术语是有用的,并且,以下定义仅用于对本公开中的要素进行限定。
20.如在本公开中所使用的,“有限元方法”是指利用数学模型(例如机械结构的模型)来分析和解决工程问题的一种广泛使用的方法。有限元方法是用于求解两个或三个空间变量中的偏微分方程(即,某些边界值问题)的一种特殊数值方法。为了解决问题,有限元方法将一个大系统细分为更小、更简单的部分,这些部分被称为有限元。这种细分可以例如通过空间维度中的特定空间离散化来实现,该空间离散化是通过构建对象的具有有限数量的点的网格来实现的,所述有限数量的点包含用于求解的数值域。边界值问题的有限元方法列
式最终得到一个代数方程组。对这些有限元进行建模的简单方程(称为有限元模型)随后组合成一个用于对整个问题进行建模的更大的方程组。随后,有限元方法使用变化微积分(calculus of variations)中的变分方法(variational methods),通过将相关的误差函数最小化来逼近解。在数学上,形成有限元模型基础的机械系统的物理特性可以以数字形式(例如,通过刚度矩阵和/或质量矩阵)表示。可以根据刚度矩阵确定机械系统的变形模态以及无约束模态。
21.如在本公开中所使用的,“无约束运动”和“无约束模态”是指有限元模型中的一部分在特定方向上不受限制的自由运动的状态。
22.如在本公开中所使用的,“罚刚度(penalty stiffness)”是指应用大刚度以确保期望/预期的位移。
23.在数值分析和线性代数中,“下-上(lu)分解”或因式分解将矩阵分解为下三角矩阵和上三角矩阵的乘积。该乘积有时还包括置换矩阵。lu分解可以看作是高斯消元的矩阵形式。计算机通常利用lu分解来求解二次线性方程组(square systems of linear equations),lu分解也是矩阵求逆或计算矩阵行列式的关键步骤。lu分解是由波兰数学家tadeusz banachiewicz于1938年提出的。奇异矩阵的一个简单示例是。该奇异矩阵的lu分解:u矩阵(最终矩阵的左下角)的0个对角线元素是奇点的指示(并且,在本公开的上下文中,是无约束模态的指示)。
24.在线性代数中,奇异值分解(singular value decomposition,svd)是实矩阵或复矩阵的因式分解,它通过极分解的扩展将平方正规矩阵的特征分解推广到任意的m
×
n矩阵。
25.现在将详细参考本发明的实施例,实施例的示例在附图中示出。在任何可能的情况下,在附图和说明书中使用相同的附图标记来表示相同或类似的部件。
26.本发明的示例性实施例涉及用于对有限元模型的各部件之间的无约束运动以及低刚度连接进行快速识别的系统和方法。这些实施例使得能够在运行期望的模拟之前,实现自动调用方法以确定无约束的部件或者识别各部件之间的强度较弱的连接,从而可以向模拟分析人员报告相应的模态以施加适当的约束或者对弱连接进行加强。一旦这些不被期望的模态被识别出来,分析人员通常会直观地调整有限元模型来约束它们。
27.如背景部分所述,用于系统地确定有限元模型的各部件之间的无约束和/或低刚度连接的方法在以前需要大量的计算时间。本发明的示例性实施例包括一种更快的方法,该方法在运行所期望的模拟之前,自动地调用svd方法以确定与无约束的运动模态(或低刚度连接)相对应的具有小奇异值的模态,从而可以向模拟分析人员报告这些模态以进行解析。一旦该方法识别出一个或多个这种不期望的模态,分析人员通常能够更直观地对有限元模型进行调整以对相应的一个或多个部件进行约束,或者对涉及的低刚度连接进行修复。具体地,所识别的无约束模态可以被自动地解析,例如,通过稳定化方法。
28.如以下进一步详细描述地,在实施例中,与有限元模型相关联的刚度矩阵被暂时地变换为简化(simplified)的刚度矩阵。例如,简化的刚度矩阵可能比完整的有限元模型
刚度矩阵小得多,简化的刚度矩阵对于每个部件通常只有三个位移自由度和三个旋转自由度。对约化(简化)的刚度矩阵的各部件之间的无约束模态和/或非常低的刚度连接进行评估。与约化刚度矩阵相关联的自由度表示各个部件的位移和旋转,使得约化刚度矩阵的模态刚度对应于部件间相对平移或旋转的阻力。部件间相对平移或旋转的模态的零阻力指示无约束运动。与部件间相对平移或旋转的模态相关联的非常低的阻力指示非常低的连接刚度。注意,部件间相对平移和旋转的阻力可以直接根据原始刚度矩阵进行计算,但是与通过约化刚度矩阵对这些阻力进行计算相比,根据原始刚度矩阵进行计算的计算工作量要大得多。
29.图1a至图1b示出了简单的二维模型的一个示例性的第一实施例。图1a示出了三部件组件的原始有限元表示100。根据原始有限元表示100,第一部件1、第二部件2和第三部件3中的每一个包括在内部和外部相互关联的多个子组件(sub-component)。出于描述的目的,网格的每个方格代表每个部件1、2、3的一个子组件。如下文参照图2所述,将原始有限元表示100暂时地变换为约化系统表示150,如图1b所示,该约化系统表示具有简化的第一部件1’、简化的第二部件2’和简化的第三部件3’,其中,每个部件具有一个点。对约化系统150进行快速评估以确定约化系统150在各部件之间是否包含一个或多个无约束和/或低刚度连接(该一个或多个无约束和/或低刚度连接也存在于原始有限元表示100中)。原始系统100包括:1)每个部件1、2、3的有限元网格,2)在部件1、2、3之间的相接触的位置处的连接,以及3)沿着第一部件1的底部边缘到地面140的连接。通过利用有限“罚”刚度强制执行(为简化模型创建代表性刚度)简化部件1’,2’,3’之间的连接以及到地面140的连接,使得有助于向约化系统150的变换。原始有限元模型系统100中存在的连接变换到约化系统后,约化系统150包括在部件3’和部件2’之间的第三刚度153、部件1’和部件2’之间的第二刚度152,以及从部件1’到地面的第一刚度151。
30.如果在此示例中的各部件之间的连接表示无摩擦接触,则部件3’将表现出无约束滑动模态,该无约束滑动模态将由该模态中的零刚度反映,如应用于约化系统150的奇异值分解算法所预测的那样。在这个三部件、二维示例中,约化方程组涉及9个自由度,对无约束模态进行识别所需的计算时间很少,通常是一秒的一小部分。
31.图2是用于将原始有限元模型100的原始刚度矩阵变换为用于约化系统150的(更小的)约化刚度矩阵的一种示例性方法200的流程图。应当注意的是,流程图中的任何过程描述或方框应当被理解为表示包括用于在过程中实现特定逻辑功能的一个或多个指令的模块、段、代码部分或步骤,并且,在本发明的范围内包括可选的实现方式,在该可选的实现方式中可以通过所示或所讨论的顺序之外的顺序来执行功能,根据所涉及的功能,如本发明领域的普通技术人员所理解的,所示或所讨论的顺序之外的顺序包括大致同时或以相反的顺序。
32.如方框210所示,引入对于每个三维部件具有六个自由度以及对于每个二维部件具有三个自由度的、由图1b中的301、302、303表示的单个代表性节点,所述单个代表性节点表示每个部件的平移和旋转运动。在此示例中,每个部件301、302、303被建模为刚性实体。每个部件被暂时地约束而不发生变形,如方框220所示。如方框230所示,基于将部件的代表性节点301、302、303连接到同一部件的每个原始节点的构想的刚性梁151、152、153的考虑,对单元刚度矩阵进行变换以消除原始自由度,从而有利于代表性节点301、302、303的自由
度。在“concepts and applications of finite element analysis(有限元分析的概念和应用)”(第二版,第159-161页,robert d.cook,john wiley&sons,1981年)中给出了变换过程的一种示例性描述。如方框240所示,对变换的单元刚度矩阵进行组合以确定约化刚度矩阵。
33.属于单个部件的大多数有限元(包括有限元模型的大多数单元)对约化刚度矩阵的贡献为零,并且,不需要对该大多数有限元进行处理以确定约化方程组。在创建约化方程组时,仅仅考虑与部件之间的连接和接触以及与到地面的连接相关联的有限元。图3示出了涉及节点344、345和363的单个接触约束的一个示例。该变换过程将该相互作用转换为约化系统300的点302和点303之间的刚度。同样地,部件2和3之间的其他接触约束被变换成有利于点302和303之间的刚度。类似地,该变换过程将沿部件1的底部边缘的到地面的刚度转换为约化系统300的点301处的到地面340的刚度。在某些情况中,在约化刚度矩阵中保留附加自由度可能是便利的。如果用物理的低刚度弹簧代替图3中的各部件之间的接触限定,那么基于弹簧的强度(刚度),各部件之间可能存在有限的相对运动。以类似的方式,该变换过程将这些相互作用转换为约化系统300的点302和点303之间的刚度。然而,这些模态对应的奇异值将是非零的,并且将反映这些弹簧的强度。根据这些低刚度奇异值的大小,可以决定是否增加或减少弹簧刚度以满足产品要求。通过利用表示旋转能力的一个或多个点来代替连接件,并且随后减小每个部件代表点与连接件代表点之间的部件刚度,可以将类似的技术应用于其他类型的连接件(包括具有旋转功能的连接件)。
34.一旦形成了约化刚度矩阵,本实施例使用常见的奇异值分解方法(例如)快速确定约化刚度矩阵的奇异模态。这些奇异模态对应于原始系统的无约束运动的模态。对约化刚度矩阵进行奇异值分解的计算时间通常在一秒或少于一秒的数量级上(相对于对原始刚度矩阵进行奇异值分解来说更加高效)。例如,在10部件的组件(10-part assembly)模型中,约化刚度矩阵可能涉及尺寸为60
×
60的刚度矩阵,而原始刚度矩阵通常要大许多个数量级(例如,可以是100万
×
100万)。
35.在本实施例的一个优选实现方式中,对有限元模拟(或交互式预处理)软件进行修改以对任何无约束运动模态以及与低刚度连接相关联的模态自动地进行计算。
36.如果利用约化刚度矩阵识别出任何无约束位移模态,则可以将这些模态报告给用户以交互地解析,或者可能自动地解析(例如,通过添加人为刚度或阻尼)。一旦解析了位移模态,继续使用原始的(未约化的)刚度矩阵进行模拟。
37.图4是用于fe建模的方法的一个示例性实施例的流程图400。如方框410所示,创建一组件的计算机辅助绘图(computer aided drafting,cad)表示。如方框420所示,创建该组件的有限元(fe)模型。如方框430所示,提交该fe模型以用于fe模拟。如方框435所示,fe模拟确定是否检测到简单的建模问题(无约束模态)。如方框460所示,如果在fe模拟中检测到简单的建模问题,则向用户报告该问题(例如,通过警告框或其他用户界面机制),用户由此可以对fe模型进行修改,并且,如方框430所示,用户提交修改后的模型以用于fe模拟。
38.如方框450所示,如果在fe模拟中未检测到简单的建模问题,则fe模拟继续进行,以得到成功或不成功的结论,如方框455所示。如果fe模拟成功,则用户对模拟结果进行分析,如方框470所示。如果fe模拟不成功,则用户诊断并且修改fe模型,如方框460所示,并且提交修改后的模型以用于fe模拟,如方框430所示。
39.流程图400示出了用于fe建模的典型次序,在流程中的两个点(方框435和455)中用户可能需要解决模型中的问题。在方框435之后,由fe程序专门检测某些fe建模问题并且向用户指出这些建模问题。在方框455之后,其他类型的建模问题可能并不会立即显现并且可能需要额外的处理时间和/或并不能由fe程序直接识别出来。静态fe模拟的无约束(或低刚度)运动问题属于并不能由fe程序直接识别出来的一类。本实施例能够将对各部件之间的无约束/低刚度连接进行快速且具体地识别作为简单建模问题检查的一部分。例如,如果图1a、图1b和图2的3部件的示例具有与无摩擦接触相关联的部件3的无约束水平平移模态,那么上述包括变换到约化系统的方法可以对这种无约束模态进行快速识别,并且可以将该无约束模式报告给用户。一旦向用户显示了不受约束的模态,决定如何对模型进行修改通常是直观的。可选地,模拟软件可以建议或自动调用方法来稳定这些模态。
40.图5是示出了用于在多部件fe模型中对奇异模态进行识别的方法的流程图600。如方框610所示,为多部件fe模型的每个部件创建一个代表性基准点,以对无约束模态进行快速识别,以所述点为刚体基准,将每个部件视为刚性的。如方框620所示,对与各部件和连接到地面的部件之间的连接相关联的有限元实体进行迭代。如方框625所示,这些连接被认为是以有限刚度强制执行的。
41.k’=t
t
kt(方程式.1)
42.执行上述标准形式变换以将单元刚度矩阵转换为仅涉及基准点的平移和旋转的矩阵。这些贡献被组合成一个仅涉及部件基准点的平移和旋转的整体刚度矩阵。
43.如方框630所示,在仅涉及部件基准点的平移和旋转的整体刚度矩阵上执行标准的奇异值分解。如方框640所示,奇异值分解输出中的模态刚度是否为零或很小。如果是,则将从奇异值分解中输出的相应模态振型(mode shape)报告给用户,指示待稳定的模态。
44.用于执行上面详细描述的功能的本系统可以是计算机,图6的示意性框图中示出了这种系统的一个示例。系统500包括处理器502、存储设备504、具有存储在其中的定义上述功能的软件508的存储器506、输入和输出(i/o)设备510(或外围设备),以及能够在系统500内进行通信的本地总线或本地接口512。本地接口512可以是,例如但不限于,本领域已知的一个或多个总线或其它有线或无线连接。本地接口512可以具有(为了简单起见而省略的)附加元件以实现通信,诸如控制器、缓冲器(高速缓存)、驱动器、中继器以及接收器。此外,本地接口512可以包括地址、控制和/或数据连接,以在前述组件之间实现适当的通信。
45.处理器502是用于执行软件(特别是存储在存储器506中的软件)的硬件设备。处理器502可以是任何定制的或市售的单核或多核处理器、中央处理单元(cpu)、与本系统500相关联的若干处理器中的辅助处理器、基于半导体的微处理器(以微芯片或芯片组的形式)、宏处理器,或者是通常用于执行软件指令的任何设备。
46.存储器506可以包括易失性存储器元件(例如,随机存取存储器(ram,诸如dram、sram、sdram等))和非易失性存储器元件(例如,rom、硬盘驱动器、磁带、cdrom等)中的任何一个或组合。此外,存储器506可以结合电子、磁性、光学和/或其他类型的存储介质。注意,存储器506可以具有分布式架构,各种组件在存储器中彼此远离,但是该存储器可以由处理器502访问。
47.根据本发明,软件508定义了由系统500执行的功能。存储器506中的软件508可以包括一个或多个单独的程序,如下所述,每个程序包含用于实现系统500的逻辑功能的可执
行指令的有序列表。存储器506可以包含操作系统(o/s)520。该操作系统本质上控制系统500内的程序的执行,并且提供调度、输入-输出控制、文件和数据管理、存储器管理,以及通信控制和相关服务。
48.i/o设备510可以包括输入设备,例如但不限于,键盘、鼠标、扫描仪、麦克风等。此外,i/o设备510还可以包括输出设备,例如但不限于,打印机、显示器等。最后,i/o设备510可以进一步包括经由输入和输出两者进行通信的设备,诸如但不限于,调制器/解调器(调制解调器;用于访问另一设备、系统或网络)、射频(rf)或其他收发器、电话接口、桥接器、路由器,或其他设备。
49.如上所述,当系统500在运行时,处理器502被配置为执行存储在存储器506内的软件508,以将数据传送到存储器506并且传送来自存储器506的数据,并且根据软件508总体上控制系统500的运行。
50.当运行系统500的功能时,处理器502被配置为执行存储在存储器506内的软件508,以将数据传送到存储器506并且传送来自存储器506的数据,并且根据软件508总体上控制系统500的运行。操作系统520由处理器502读取,该操作系统可能在处理器502内被缓冲,随后被执行。
51.当在软件508中实现系统500时,应当注意的是,用于实现系统500的指令可以存储在任何计算机可读介质上,以由任何计算机相关设备、系统或方法使用,或者与任何计算机相关设备、系统或方法结合使用。在一些实施例中,这种计算机可读介质可以对应于存储器506或者存储设备504之一或两者。在本文的上下文中,计算机可读介质是可以包含或存储计算机程序的电子的、磁性的、光学的或其它物理的设备或装置,该计算机程序用于由计算机相关设备、系统或方法使用,或者用于与计算机相关设备、系统或方法结合使用。用于实现该系统的指令可以体现在任何计算机可读介质中,以便由处理器或其它这样的指令执行系统、装置或设备使用,或者与该处理器或其它这样的指令执行系统、装置或设备结合使用。尽管已经通过示例的方式提到了处理器502,但在一些实施例中,这样的指令执行系统、装置或设备可以是任何基于计算机的系统、包含处理器的系统,或能够从指令执行系统、装置或设备获取指令并执行指令的其他系统。在本文的上下文中,“计算机可读介质”可以是能够对程序进行存储、通信、传播或传输,以由处理器或其他这种指令执行系统、装置或设备使用或者与处理器或其他这种指令执行系统、装置或设备结合使用的任何装置。
52.这种计算机可读介质可以是,例如但不限于,电子的、磁性的、光学的、电磁的、红外的、或半导体的系统、装置、设备或传播介质。计算机可读介质的更具体的示例(非穷尽列表)将包括如下:具有一根或多根导线的电连接(电子的)、便携式计算机磁盘(磁性的)、随机存取存储器(ram)(电子的)、只读存储器(rom)(电子的)、可擦除可编程只读存储器(eprom,eeprom,或闪存)(电子的)、光纤(光学的),以及便携式光盘只读存储器(cdrom)(光学的)。注意,计算机可读介质甚至可以是打印有程序的纸或其他适当介质,因为可以通过诸如对纸或其他介质的光学扫描而以电子方式获取所述程序,随后对所述程序进行编译、解释,或者在必要时以适当的方式对所述程序进行处理,随后将所述程序存储在计算机存储器中。
53.在一个可选的实施例中,其中,系统500在硬件中实现,系统500可以由以下技术(这些技术在本领域中都是众所周知的)中的任何一个或组合来实现:具有用于在数据信号
上实现逻辑功能的逻辑门的一个或多个离散逻辑电路、具有适当组合逻辑门的专用集成电路(asic)、可编程门阵列(pga)、现场可编程门阵列(fpga)等。
54.上述实施例能够利用到约化刚度矩阵的变换对无约束模态进行识别,与对原始刚度矩阵的奇异模态进行评估相比,上述实施例提供了更快的性能数量级。变换操作快速且鲁棒。本实施例提供了非常快速地识别无约束模态的能力,使得模拟软件在默认情况下自动识别这些模态而不会使模拟分析人员经历明显的延迟而使模拟软件具有实用性。不断地使模拟分析人员注意到任何无约束模态或者让软件自动稳定这些模态,增加了模拟成功的可能性,并且使模拟分析人员更加高效并且对模拟软件更加满意。
55.对于没有经验和有经验的模拟分析人员来说,导致无约束位移模态的建模误差通常都会发生。即使是经验丰富的习惯于处理这种问题的模拟分析人员,也会认可软件在这方面提供的更好的帮助。以前,由于无约束位移模态而经历模拟失败的经验不足的模拟分析人员,可能会得出模拟软件太难使用的结论而放弃。在本实施例下,他们更有可能对模拟软件具有良好的体验。对于处理复杂的有限元模型(诸如具有数十个部件的集合)的分析人员将特别认可本发明的优点,在这些复杂的有限元模型中,部件之间的关系有时变得难以理解并且难以追踪。使用所述实施例中描述的系统,分析人员可以容易地识别组件内的在一个或多个方向上不稳定的部件。
56.对于本领域的技术人员显而易见的是,在不脱离本发明的范围或精神的情况下,可以对本发明的结构进行各种修改和变化。鉴于前述内容,本发明旨在涵盖本发明的修改和变化,只要它们落入所附权利要求及其等同形式的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。