1.本发明的技术方案涉及使用制备包含车辆多种信息车辆数据库获取、整理保存过程,具体地说是包含图像和噪声的车辆数据库制备方法。
背景技术:
2.车辆已经成为现代社会中重要的交通工具,汽车数量的增加需要交通管理,同时智能交通是当今汽车领域中重要的发展方向。无论是车辆交通管理,还是车辆智能交通,必须对车辆进行识别和分类,其中需要庞大的车辆数据库满足训练模型需求。
3.现有技术中车辆图像数据库,主要有compcars车辆数据库、stanford cars车辆数据库和bit-vehicle数据库,论文(neurocomputing,2020,399:247
–
257)对上面三个车辆数据库进行了描述。compcars是一个由香港中文大学构建的大型车辆数据库,由监控视频和网络下载的数据组成,包括了正视图、后部图、侧视图、前面-侧面和后面-侧面车辆图像。stanford cars是一个由斯坦福大学构建的大型车辆数据库,专利cn109753999a应用stanford cars车辆数据库识别了任意视角汽车图片的细粒度车型。专利cn109598218a和论文(计算机工程与设计,2019,40(11):3331-3336 3348)使用bit-vehicle数据库。除了上面车辆数据库外,专利cn110008360a公开了包含特定背景图像的车辆目标图像数据库建立方法,该方法采集制作特定背景图像,制作只包含单一车辆图像的车辆特定背景的目标图像。
4.在声音数据库方面,主要有urban sound、free sound声音数据库。论文(工业控制计算机,2021,34(03):97-98 102)使用了urban sound和free sound声音数据库对神经网络进行训练,urban-sound收集了冷气机、汽车喇叭、儿童玩耍、狗吠声、钻孔、发动机空转、枪击声、手持式凿岩机、警笛、街头音乐;free sound是一个开放的声音数据库,也可以用于科学研究,方便搜集特种车辆警报声,其中车辆警报声中广泛包括了救护车、警车、消防车、工程车等各种特种车辆的声音。在论文(科学技术与工程,2020,20(33):13757-13761)中同样了使用了urban-sound8k声音数据集。
5.以上众多图像数据库包含了车辆图像,但是缺少了车辆噪声信息。声音数据库中包含了车辆鸣笛声音,并没有图像特征,采集的车辆视频数据库中同时包含车辆图像和车辆产生的声音,但是视频耗费了大量存储空间,并且缺少了车辆速度具体的数值。
6.总之,上述车辆图像数据库注重了车辆的图像特征,应用在车辆图像类型识别和分类,忽略了车辆噪声特征;声音数据库包含了声音特征,用于声音类型识别和分类,忽略了图像特征;车辆视频数据库占有庞大存储空间,并且不含有车辆速度。
技术实现要素:
7.针对现有技术的不足,本发明所要解决的技术问题是:利用在公共道路行驶的车辆制备数据库过程,在公共道路旁边设置采样点,采集车辆图像和车辆噪声、测量车速,并记录车辆采集过程中的采样率、车辆速度、采样点与最外侧机动车道和非机动车道分界线
的距离、车辆所在的行车道和车辆动力类型,按照车辆名称、采集日期和当天的采集编号对采集的车辆图像、噪声和说明文本进行存储,得到样本数据集,多个样本数据集构成车辆数据库,其中采集的车辆图像同时包含了车辆正面和侧面特征。对车辆图像、噪声的采集、车速测试、文本内容、格式和文件夹进行详细描述,包括了传统燃油车和新能源车的车辆图像、车辆噪声数据制备过程。本发明克服了现有技术中车辆图像数据库中缺少汽车噪声数据、车辆噪声数据库缺少汽车图像、记录车辆噪声的信息缺少车辆行驶车道和车辆动力类型、车辆视频数据库占有储存空间大且无直接速度信息的缺陷。
8.本发明解决该技术问题所采用的技术方案是:
9.包含图像和噪声的车辆数据库制备方法,其特征在于,该方法的具体步骤如下:
10.第a步,在行驶路段采集车辆数据,包括车辆图像、车辆噪声和车辆速度,得到大量的原始车辆图像和原始车辆噪声;
11.在距机动车道与非机动车道分界线距离为d的位置设置采样点,分别通过三角架放置照相机、声音记录仪和车速测量仪,利用照相机采集车辆图像,声音记录仪采集车辆噪声,车速测量仪测量车辆速度;
12.第b步,筛选车辆数据,对第a步采集的车辆图像和车辆噪声进行筛选;
13.第b.1步,剔除图像包含密集车辆的数据;
14.判断车辆图像是否是包含密集车辆的图像,若车辆图像中包含两辆及以上车辆,并且其他车辆与采集车辆沿车道长度方向上的间距小于δl时,则认为图像中包含密集车辆,其他车辆噪声对采集车辆噪声的影响较明显,不符合要求,需要剔除此类车辆图像或者不采集这些情形下的车辆数据;δl=v
×
δt表示其他车辆噪声明显影响采集车辆噪声的最小距离,v表示车辆速度,δt表示其他车辆噪声明显影响采集车辆噪声的时间间隔;根据机动车道实际宽度与车辆图像中机动车道宽度计算映射比例、采集车辆车身实际长度在车辆图像中对应的长度映射比例,估算δl在图像中对应的长度;
15.第b.2步,剔除车辆噪声受到严重干扰的数据;
16.判断位于采集车辆周围的其他车辆噪声是否对采集车辆噪声产生严重干扰,若其他车辆噪声对采集车辆噪声产生严重干扰,则采集车辆噪声信号中会出现两个及以上噪声峰,噪声峰存在严重的耦合,因此沿时间t轴以0.3s为窗口,通过式(1)计算各窗口内的噪声平均强度
[0017][0018]
其中,t
max
为采集车辆噪声的最长时间,单位为s,i(t)表示采集的原始车辆噪声;
[0019]
在采集车辆噪声峰前、后分别选取两个时刻点,这两个时刻点分别位于采集车辆噪声峰前面相邻的噪声峰之后、采集车辆噪声峰后面相邻的噪声峰之前,这两个时刻点位于偏离采集车辆噪声峰峰值时刻的最长时间(40/v)s内,v表示车辆速度,单位为:m/s;计算两个时刻点所在窗口内的噪声平均强度,若不存在这两个时刻点所在窗口内的噪声平均强度降至采集车辆噪声平均强度最大值的40%以下的情况,则表明其他车辆噪声对采集车辆噪声产生严重干扰,需要剔除此类车辆噪声数据;
[0020]
第c步,从筛选后的车辆图像中选择其中一张同时反映车辆正面和侧面特征的图
像进行存储;
[0021]
当车辆图像中车辆部分的长、宽均不小于50个像素时,并且车辆图像中包含的车辆正面和侧面特征清晰,认为该张车辆图像能够清晰反映车辆正面和侧面特征,则保留该张车辆图像;
[0022]
第d步,截取和平移车辆噪声数据;
[0023]
第d.1步,对筛选后的车辆噪声数据进行截取;
[0024]
对于筛选后的车辆噪声数据,以噪声平均强度降至采集车辆噪声平均强度最大值的40%以下且位于采集车辆噪声峰前、后的两个时刻点为起、止点,选取的起、止点分别位于采集车辆噪声峰前面相邻的噪声峰之后、采集车辆噪声峰后面相邻的噪声峰之前,并且起、止点位于偏离采集车辆噪声峰峰值时刻的最长时间(40/v)s内,v表示车辆速度,单位为:m/s;截取起、止点之间的车辆噪声,得到截取车辆噪声数据,截取车辆噪声数据反映了采集车辆逐渐靠近和远离采样点的过程;截取车辆噪声ic(t)的表达式为:
[0025][0026]
其中,t1、t2分别为截取车辆噪声的起、止时刻;
[0027]
t1、t2时刻点所在窗口内的噪声平均强度分别满足式(3)和(4);
[0028][0029][0030]
其中,max()表示极大值,a、b均为大于0.1且小于0.4的常数;
[0031]
第d.2步,通过式(5)对截取车辆噪声数据进行平移;
[0032]im
(t
′
)=ic(t-t1),t1≤t≤t2, t
′
=t-t1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0033]
其中,im(t
′
)表示平移后的车辆噪声数据,t
′
为平移后的时间;
[0034]
第e步,保存车辆图像数据、车辆噪声数据以及说明文本;
[0035]
第e.1步,保存图像数据;
[0036]
按照“车辆类型_采集日期_采集序号”的格式对第c步得到的车辆图像数据进行命名,车辆图像采用jpg、png或tif其中任意一种格式存储;
[0037]
第e.2步,保存噪声数据;
[0038]
按照“车辆类型_采集日期_采集序号”的格式对第d步得到的车辆噪声进行命名,车辆噪声数据采用wav或mp3声音文件格式存储;
[0039]
第e.3步,保存说明文本;
[0040]
编写说明文本,并以txt格式存储;说明文本包括噪声采样率、车辆速度、采样点与最外侧机动车道和非机动车道分界线的距离、车辆行驶车道以及车辆动力类型在内的说明文字;
[0041]
以“车辆类型_采集日期_采集序号”的格式新建文件夹,并将上述保存的车辆数据、噪声数据以及说明文本存储在此文件夹中;
[0042]
至此完成包含图像和噪声的一个样本数据集的制备,选取不同类型的车辆,重复上述步骤,得到多个样本数据集,所有样本数据集构成车辆数据库。
[0043]
与现有技术相比,本发明的突出实质性特点和显著进步如下:
[0044]
(1)相比现有车辆图像数据库,缺少了行驶车辆的噪声,本发明不仅包含了车辆图像特征,同时还包含了车辆噪声特征。
[0045]
(2)相比现有车辆图像数据库,本发明还包含了车辆行驶速度特征。
[0046]
(3)现有三个以及以上角度拍摄的车辆图像,并没有对单个图像中包含的车辆特征进行约束,本发明采集的车辆图像同时包含了车辆正面和侧面特征,反映出车辆整体特征,车辆正面和侧面特征可以作为整体特征使用,也可以单独使用,使得本发明以最少的图像更全面地反映车辆特征。
[0047]
(4)相比现有的车辆视频数据库,本发明节省了大量存储空间。
[0048]
(5)相比采用专用车辆场地采集车辆数据,本发明在公共道路采集多种类型车辆的图像和噪声,采集的车辆数据更反映出车辆实际道路行驶复杂真实状态。
[0049]
(6)相比采用专用车辆场地采集自己驾驶车辆采集的车辆噪声数据,本发明在公共道路采集多种类型车辆的图像和噪声,有更多采集车辆数据源,采集成本低,采集车辆样本数据集更容易拓展。
[0050]
(7)相比现有车辆图像数据库,本发明剔除了包含密集车辆的图像,避免采集车辆噪声产生较大干扰。
[0051]
(8)本发明采用车辆速度和其他车辆噪声对采集车辆噪声造成严重干扰的时间间隔之积,从拍照图像上根据其他车辆与采集车辆的间距,判断其他车辆噪声是否对采集车辆噪声产生较大影响,剔除车辆噪声严重干扰的数据。
[0052]
(9)本发明对车辆噪声数据进行分析,从噪声数据上根据噪声窗口内车辆噪声平均强度判断其他车辆噪声是否对采集车辆噪声产生较大的影响。
[0053]
(10)本发明采用接近采样点的车辆图像和车辆噪声两方面判断其他车辆噪声是否对采集车辆噪声产生较大的影响,避免采用单一方法产生误判。
[0054]
(11)相比现有噪声数据库,本发明对车辆噪声数据进行筛选,剔除了受到较大干扰的噪声数据,保证了采集车辆的噪声数据保持自己的特征。
[0055]
(12)相比现有噪声数据库,本发明对筛选后的车辆噪声数据进行了截取,删除了其他车辆产生较大噪声的部分,减少其他车辆产生的噪声在噪声数据中占有的比例。
[0056]
(13)相比现有噪声数据库,本发明对已经截取车辆数据库进行时间平移,车辆噪声数据存储更规范。
[0057]
(14)相比现有车辆数据库,本发明包含了txt格式的说明文本,记载了声音记录仪的采样率、测量车速、采样点与非机动车道和机动车道分界线的距离和右侧/左侧行车道编号,还记载了车辆动力类型,即燃油车或者电动车,记录车辆数据库信息更详细。
[0058]
(14)本发明方法一种车辆数据库是采用公共道路附近架设3组三脚架,分别放置照相机、声音记录仪和速度测量仪,相比架在行车道路上方的公共交通监管系统,本发明更容易操作和移动。
[0059]
(15)本发明方法一种车辆数据库,同样的方法可以推广水面船只等交通工具,具有通用性。
附图说明
[0060]
图1为本发明的整体流程图;
[0061]
图2为本发明的采样点以及采集设备的位置示意图;
[0062]
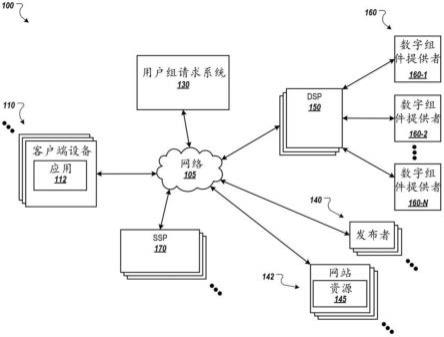
图3为本发明制备的车辆数据库的架构图;
[0063]
图4为实施例1中远离采样点采集的车辆图像经过边缘提取和二值化后的效果图;
[0064]
图5为实施例1中接近采样点采集的车辆图像经过边缘提取和二值化后的效果图;
[0065]
图6为与图5对应的车辆噪声时序图;
[0066]
图7为图6的原始车辆噪声经过截取后的车辆噪声时序图;
[0067]
图8为图7的车辆噪声经过平移后的车辆噪声时序图;
[0068]
图9为实施例1中说明文本的示意图;
[0069]
图10为实施例2采集的车辆图像经过边缘提取和二值化后的效果图;
[0070]
图11为图10对应的车辆噪声时序图;
[0071]
附图标记说明:401、道路提示牌;402、机动车道和非机动车道分界实线;403、第一机动车道;404、卡车;405、无线信号塔;406、第二机动车道;407、行车道分界虚线;408、树木;501、其他车辆;1001、行驶在右侧第一机动车道的车辆;1002、行驶在右侧第二机动车道上的车辆,机动车行车道从最外侧开始排序。
具体实施方式
[0072]
图1所示实施例表明,本发明的操作流程是:第a步,在行驶路段采集车辆数据,包括车辆图像、噪声和速度;
→
第b步,筛选采集车辆数据,包括第b.1步,剔除图像包含密集车辆的数据;第b.2步,剔除车辆噪声受到严重干扰的数据;
→
第c步,选取一张同时反映车辆正面和侧面特征的图像进行存储;
→
第d步,截取和平移车辆噪声数据;
→
第e步,保存车辆图像数据、噪声数据以及说明文本,包括第e.1步,保存图像数据;第e.2步,保存噪声数据;第e.3步,保存说明文本。
[0073]
图3为本发明制备的车辆数据库的架构图,车辆数据库包含一种或者多种车型的车辆数据,车型为车型1、车型2、车型3、....,分别对应卡车(track)、面包车(van)、越野车(suv)、小轿车(car)、公交车(bus)等;每种车型包含以“车辆类型_采集日期_采集序号”格式命名的多个文件夹,每个文件夹均包含车辆图像数据、车辆噪声数据以及说明文本;说明文本包括声音记录仪采样率、车辆速度v、采样点与最外侧机动车道和非机动车道分界线的距离d、车辆行驶车道以及车辆动力类型等内容。
[0074]
实施例1
[0075]
本实施例以传统燃油卡车为例,说明包含图像和噪声的车辆数据库制备方法,该方法的具体步骤如下:
[0076]
第a步,在行驶路段采集车辆数据,包括车辆图像、车辆噪声和车辆速度;
[0077]
采集日期为2021年12月25日,采集地点为某大学校门正门右侧约300m处,如图2所示,采样点位于非机动车道之外且采样点和最外侧机动车道与非机动车道分界线的距离d=2m,在采样点处分别通过三脚架放置照相机、声音记录仪和车速测量仪,照相机镜头斜向对着车辆逐渐靠近采样点的方向;利用照相机采集车辆图像,同一张车辆图像须包含车辆正面和侧面特征;声音记录仪车辆噪声,车速测量仪测量车辆速度;本实施例测量的车辆速
度为33km/h,由于采样时长较短,车辆可视为匀速行驶;声音记录仪采样率为48000hz,为为采集车辆噪声的最长时间t
max
为6.9s;
[0078]
图4、5分别为远离采样点和接近采样点处采集的两张车辆图像,照相机拍摄的原始图像为彩色图像,图4、5为原始图像经过边缘提取和二值化后的效果图,图中包括道路提示牌401、机动车道与非机动车道分界实线402、第一机动车道403、卡车404、无线信号塔405、第二机动车道406、行车道分界虚线407和树木408,机动车道从最外侧机动车道开始计数;从图4可以看出,由于卡车404距离采样点较远,因此图像中车辆占比较小,并且只反映出车辆的正面特征,侧面特征反映较少;图5中还包括位于卡车404后方的其他车辆501,由于卡车距离采样点较近,图像中包含了车辆的正面和侧面特征较全。
[0079]
图6为本实施例采集的与图4和图5相对应的车辆噪声时序图,噪声强度i随时间t变化,噪声强度i采用任意单位a.u.表示;在t=0时刻就出现较大噪声,表明在采集卡车噪声之前还出现了其他车辆噪声;在t=0.8s~6.3s之间,噪声强度先从平缓变化逐渐增大,再逐渐减小,反映了卡车由远及近逐渐接近采样点,再逐渐远离的过程;在t=6.3s之后,噪声强度再次逐渐增大,结合图6可知,声音记录仪还采集到了位于卡车404后方的其他车辆501的噪声。
[0080]
第b步,筛选车辆数据,对第a步采集的车辆图像和噪声进行筛选;
[0081]
第b.1步,剔除图像包含密集车辆的数据;
[0082]
若车辆图像中包含两辆及以上车辆,并且其他车辆与卡车沿车道长度方向上的间距小于δl时,则认为图像中包含密集车辆,其他车辆噪声对卡车噪声的影响较明显,不符合要求,需要剔除该车辆图像或者不采集这些情形下的车辆数据;δl=v
×
δt表示其他车辆噪声明显影响卡车噪声的最小距离,v表示车辆速度,δt表示其他车辆噪声明显影响卡车噪声的时间间隔;根据机动车道实际宽度与车辆图像中机动车道宽度计算映射比例、采集车辆车身实际长度在车辆图像中对应的长度映射比例,估算δl在图像中对应的长度;
[0083]
例如本实施例测量的卡车速度33km/h=9.2m/s,其他车辆噪声明显影响卡车噪声的时间间隔δt按照1s估算,则根据δl=v
×
δt确定δl≈9m,要求车辆图像中位于卡车前、后的9m范围内同车道或相邻车道上没有其他车辆存在;如图4所示,卡车车长等比例映射至车辆图像中,位于卡车404前面至少两个卡车车长距离内没有其他车辆;如图5所示,位于卡车404后方的其他车辆501与卡车404的间距至少为两个卡车车长,卡车实际车长大于等于4.5m,车辆501与卡车404的间距至少在9m之上;因此,认为其他车辆产生噪声不会对卡车404的噪声产生明显影响,此时该采集车辆图像、噪声符合要求;
[0084]
第b.2步,剔除车辆噪声受到严重干扰的数据;
[0085]
若位于卡车前后、左右的其他车辆对卡车噪声产生较大干扰,则在采集的原始车辆噪声i(t)时序图中会出现两个及以上的噪声峰,相邻噪声峰之间产生严重耦合,因此沿时间轴以0.3s为一个窗口,通过式(1)计算各窗口内的噪声平均强度
[0086][0087]
其中,t
max
为采集车辆噪声的最长时间,实例1中t
max
为6.9s;
[0088]
图6为与图5对应的车辆噪声时序图,在t=3s~5.5s出现卡车噪声峰,卡车噪声平
均强度的最大值为0.091a.u.,t=2.1s所在窗口的噪声平均强度为0.022a.u.,t=6.3s所在窗口的噪声平均强度为0.033a.u.,0.022/0.091=0.24《0.4,0.033/0.091=0.36《0.4,t=2.1s和t=6.3s这两个时刻点,位于采集卡车噪声峰前面相邻的噪声峰之后、采集卡车噪声峰后面相邻的噪声峰之前,这两个时刻点位于偏离卡车噪声峰峰值时刻的最长时间为(40/v)s=(40/9.2)s≈4.3s内,表明在卡车噪声峰附近t=2.1s和t=6.3s的噪声平均强度已经降至卡车噪声平均强度最大值的40%以下,认为此时卡车的噪声受到其他车辆噪声的干扰小,符合采集要求,需要保留此类噪声数据。
[0089]
第c步,从清洗后的车辆图像中选取其中一张同时反映车辆正面和侧面特征的图像进行储存;
[0090]
由于照相机拍摄的车辆图像整体尺寸一致,车辆由远及近靠近采样点的过程中,当车辆图像中车辆部分的长、宽均不小于50个像素,并且包含车辆正面和侧面特征清晰,认为该张车辆图像能够清晰反映车辆正面和侧面特征,则保留该张车辆图像;
[0091]
对比图4、5可知,图4中卡车距离采样点较远,卡车在图像中的占比较小,虽然能够反映车辆正面特征,但是包含的卡车侧面特征较少,因此不符合筛选条件;图5中卡车距离采样点较近,车辆图像中卡车部分的长、宽均不小于50个像素,能够清晰地反映卡车正面和侧面特征,符合筛选条件,因此将图5保留;车辆图像中包含卡车正面和侧面特征,这两种特征可以单独使用也可以作为整体特征使用,使得本方法在获取车辆图像较少的情况下,反映的车辆特征更多。
[0092]
第d步,截取和平移车辆噪声数据;
[0093]
第d.1步,对筛选后的车辆噪声进行截取;
[0094]
对于第b.2步筛选后的卡车噪声,由于采集的卡车噪声中存在其他车辆噪声,在t=0和t=6.3附近含有其他车辆噪声,因此需要对从原始车辆噪声i(t)中截取出受到较小干扰车辆噪声并保留,得到截取车辆噪声ic(t),本实施例的截取时间区间为[2.1,6.3]s,截取卡车噪声开始时间t1=2.1s,结束时间t2=6.3s,将t1=2.1s和t2=6.3s代入式(2)得到式(6):
[0095][0096]
t1=2.1s和t2=6.3s时刻点所在窗口内的噪声平均强度分别满足式(3)和(4),对应分别得到式(7)和(8):
[0097][0098][0099]
这里通过第b.2步,确定a=0.24,b=0.36,a、b均满足大于0.1且小于0.4常数的条件;
[0100]
图7为图6的原始卡车噪声经过截取后的车辆噪声时序图,卡车噪声随着时间逐渐增大,达到最大后,再逐渐减少,反映了卡车逐渐靠近以及远离采样点过程中车辆噪声的变化趋势;
[0101]
第d.2步,通过式(5)对截取车辆噪声进行平移,平移后的车辆噪声从t
′
=0时刻开
始记录车辆噪声,平移后的车辆噪声即为最终的车辆噪声;
[0102]
将裁剪后的卡车噪声ic(t)平移,裁剪后的卡车噪声从t1=2.1s开始记录,代入式(5)得到平移后的卡车噪声im(t')式(9):
[0103]im
(t
′
)=ic(t-2.1) 2.1≤t≤6.3 ,t
′
=t-2.1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0104]
其中,t
′
为平移后的时间,平移后的卡车噪声从t
′
=0时刻开始记录车辆噪声;;
[0105]
图8为图7对应的平移后的卡车噪声时序图,相当于将图7的卡车噪声沿时间轴平移了2.1s。
[0106]
第e步,保存车辆图像数据、车辆噪声数据以及说明文本;
[0107]
第e.1步,保存图像数据;
[0108]
按照“车辆类型_采集日期_采集序号”的格式对第c步得到的卡车图像进行命名,卡车图像采用jpg、png或tif等常用图片格式存储;例如图像数据文件为:卡车_20211225_1.jpg,表示车辆类型为卡车,采集日期为2021年12月25日,采集序号为1,车辆图像存储格式为jpg;
[0109]
第e.2步,保存噪声数据;
[0110]
按照“车辆类型_采集日期_采集序号”的格式第d步得到的卡车噪声进行命名,卡车噪声采用wav、mp3等声音数据文件格式存储;例如噪声数据文件为:卡车_20211225_1.wav,表示车辆类型为卡车,采集日期为2021年12月25日,采集序号为1,车辆噪声存储格式为wav;
[0111]
第e.3步,保存说明文本;
[0112]
编写说明文本,并以txt格式存储;说明文本包括声音记录仪采样率、车辆速度、采样点与最外侧机动车道和非机动车道分界线的距离、车辆行驶车道以及车辆动力类型等内容;如图9所示,说明文本包含的内容由上至下分别为:48000hz、33km/h、2m、右侧第1条路和燃油车,分别表示声音记录仪采样率为48000hz、车辆速度为33km/h、采样点与最外侧机动车道路和非机动车道路分界线的距离为2m、车辆在右侧第一条机动车道上行驶,车辆为燃油车;左、右侧分别指采集车辆的左、右侧,机动车道的编号从最外侧机动车道开始计数;
[0113]
以“车辆类型_采集日期_采集序号”的格式新建文件夹,并将上述保存的车辆图像数据、车噪声数据以及说明文本存储在此文件夹中,例如文件夹名称为“卡车_20211225_1”;
[0114]
至此完成本实施例中卡车的一个样本数据集的制备;
[0115]
按照同样方法采集卡车在其他速度下的车辆数据,可以制备卡车的多个样本数据集;
[0116]
同理选取其他类型的车辆,重复上述步骤,得到不同车辆的多个样本数据集,所有样本数据集构成车辆数据库。
[0117]
上述包含图像和噪声车辆数据库制备方法,所涉及的操作方法和设备是本技术领域所公知的。
[0118]
实施例2
[0119]
本实施例与实施例1的步骤完全相同,只是第a步中采集的车辆图像和车辆噪声不同;
[0120]
如图9所示,车辆图像中除卡车404外,还包括行驶在右侧第一机动车道的车辆
1001和行驶在右侧第二机动车道上的车辆1002,实例2中的卡车404速度与实例1接近,按照实施例1估算δl≈9m,这两辆车辆1001和1002分别与卡车404相距不到9m,因此则该图像中包含密集车辆,行驶在右侧第一机动车道的车辆1001和行驶在右侧第二机动车道上的车辆1002的噪声对卡车404噪声产生较大干扰,在这种情况下采集的车辆噪声不符合要求,可以停止对此类情况下车辆噪声的采集,但为了验证本发明的判断,仍然对噪声进行采集;
[0121]
图10为图9对应的车辆噪声时序图,由于行驶在右侧第一机动车道的车辆1001和行驶在右侧第二机动车道上的车辆1002离卡车404较近,行驶在右侧第一机动车道的车辆1001和行驶在右侧第二机动车道上的车辆1002的噪声会对卡车404噪声产生明显干扰,因此车辆噪声时序图出现了多个噪声峰,且相邻噪声峰之间的耦合程度较高,在t=2.5s~6.5s出现卡车噪声峰,式(1)计算卡车噪声的平均强度最大值为0.030a.u.,在卡车噪声峰前、后附近的t=2.2s和t=6.8s各自所在窗口的噪声平均强度分别为0.018a.u.和0.017a.u.,t=2.2s和t=6.8s分别为采集噪声数据中卡车噪声峰前面的噪声平均强度最低点、采集卡车噪声峰后面噪声平均强度最低点,而0.018/0.030=0.6》0.4,0.017/0.030=0.57》0.4,表明在卡车噪声峰前、后附近的噪声平均强度还未降至卡车噪声平均强度最大值的40%,行驶在右侧第一机动车道的车辆1001和行驶在右侧第二机动车道上的车辆1002的噪声对卡车404噪声产生严重干扰,本次采集的车辆噪声数据不能使用,剔除本次采集的卡车图像、噪声和速度的数据,与第b.2步的判断达到一致。
[0122]
本发明未述及之处适用于现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。