1.本发明涉及海底位置基准站的设计方法,属于海洋测量技术领域。
背景技术:
2.为推动海洋空间基准与水下定位技术的发展,国际大地测量协会(iag)于2019年正式设立了海洋大地测量工作组。对海洋大地的测量,需要依赖海底大地基准网。然而由于海底大地基准网建设难度大,技术要求高,建设周期相对较长,而且海底大地基准网设备的工作寿命又相对较短,使得海底大地基准网的建设难度极大。
3.构建海底大地基准网涉及到构建海底位置基准站,而海底位置基准站的重要组成部分是海底位置基准信标。目前海底位置基准信标大多功能较为单一,缺乏对环境参数的观测,因此无法满足高精度定位导航服务的要求。同时,现有的海底位置基准信标一般不具备扩展接口,难以加载额外的测量设备,导致信标功能不够完善。
技术实现要素:
4.针对现有海底位置基准站中基准信标功能单一,无法满足高精度定位导航服务要求的问题,本发明提供一种海底位置基准站的设计方法。
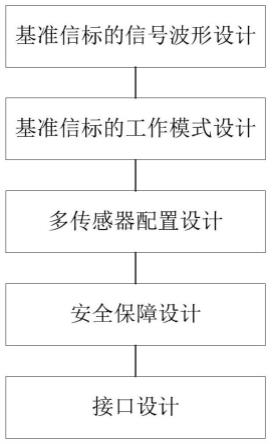
5.本发明的一种海底位置基准站的设计方法,所述基准站包括基准信标和用于固定基准信标的方舱;包括,
6.基准信标的信号波形设计:采用直扩序列作为基准信标的导航信号波形;再根据目标传播距离下的声学传播特性,确定直扩序列的类型及序列长度;
7.基准信标的工作模式设计:使基准信标在不同工况的工作环境下具备水下互测距工作模式、声学链路信息传输工作模式、主动广播工作模式及被动播发工作模式;并在不同工作模式下,通过声学指令切换的方式实现基准信标主动、被动及多源定位的切换,从而实现定位导航服务;
8.多传感器配置设计:在方舱上设置声呐传感器、惯导传感器、压力传感器、磁力传感器和重力传感器,并将各传感器与基准信标集成;
9.安全保障设计:对方舱的各组件进行防腐处理以及防泥沙处理;
10.接口设计:每个基准信标至少包括一个机械接口;每个基准站至少包括两个电气接口;
11.最后,选择2khz-4khz/8khz-16khz的双频段作为基准信标工作频率,根据目标传播距离优化导航信号波形,并优选导航信号体制。
12.作为优选,根据本发明海底位置基准站的设计方法,所述目标传播距离包括长距离、中距离及短距离;
13.将水平距离大于30公里的距离作为长距离,处于20至30公里之间的距离作为中距离,20公里以内的距离作为短距离。
14.作为优选,根据本发明海底位置基准站的设计方法,直扩序列的类型包括gold序
列、kasami序列、chu序列、复合序列及混沌序列。
15.作为优选,根据本发明海底位置基准站的设计方法,安全保障设计中,防腐处理包括:
16.对方舱本体采用厚浆型重防式涂料涂覆;
17.对方舱内组件采用耐腐蚀材料包套;
18.对方舱的结构件预留腐蚀余量;
19.对方舱的易腐蚀件采用牺牲阳极的方式进行预处理。
20.作为优选,根据本发明海底位置基准站的设计方法,安全保障设计中,防泥沙处理包括:
21.通过在方舱的基座支腿以及基座底部侧面开设通水孔,以及提高释放器安装位置的方式,防止海底泥沙的沉积。
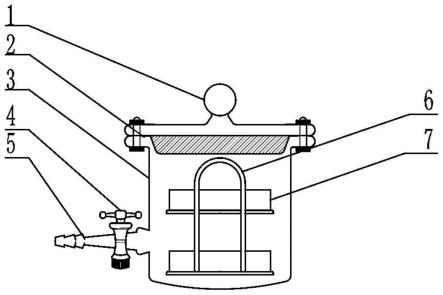
22.作为优选,根据本发明海底位置基准站的设计方法,所述接口设计中,机械接口为基准信标用于实现与方舱连接的接口;
23.两个电气接口分别为供电端口和控制端口,其中供电端口包括基准站携带的蓄电池组的电源输出端口,所述电源输出端口的电气参数与基准信标的充电端口的电气参数匹配;电源输出端口输出的电压为经稳压电路稳压后的电压;
24.控制端口包括基准站的声学释放模块的声通信端口;所述声通信端口的通信频率为低频9khz到12khz,用于接收声学释放模块对甲板单元的各种指令,并用于控制声学释放模块的各种动作;同时测量甲板单元与声学释放模块的距离。
25.作为优选,根据本发明海底位置基准站的设计方法,所述接口设计中,还包括拓展接口,所述拓展接口包括拓展机械接口和拓展供电接口;所述拓展接口用于搭载仪器设备。
26.作为优选,根据本发明海底位置基准站的设计方法,拓展接口搭载的仪器设备包括adcp、声速梯度仪和惯导设备。
27.作为优选,根据本发明海底位置基准站的设计方法,对于目标传播距离为长距离的基准信标,选择低频工作频段工作;此时对基准信标配置低频声源及高精度原子钟模块,将低频声源靠近声道轴布放。
28.作为优选,根据本发明海底位置基准站的设计方法,对目标传播距离为长距离的基准信标,配置海洋观测传感器。
29.本发明的有益效果:本发明方法设计的海底位置基准站可满足大作用范围、大作业深度和高可靠性的需求,适用于作为深海的高精度位置基准;拥有主动、被动相结合的工作模式,拓展了基准站的作用范围;本发明方法同时采用抗压、溢流、稳定、可靠的设计理念,可使基准站放的稳、布的快、待的久,从而实现长期的基准服务,为水面/水下用户提供定位导航服务。
附图说明
30.图1是本发明所述海底位置基准站的设计方法的流程框图;
31.图2是基准站的接中设计关系图;
32.图3是深海位置基准信标内外接口关系图;
33.图4是浅水位置基准信标内外接口关系图。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
35.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
36.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
37.具体实施方式一、结合图1所示,本发明提供了一种海底位置基准站的设计方法,所述基准站包括基准信标和用于固定基准信标的方舱;包括,
38.基准信标的信号波形设计:采用直扩序列作为基准信标的导航信号波形;再根据目标传播距离下的声学传播特性,确定直扩序列的类型及序列长度;
39.基准信标的工作模式设计:使基准信标在不同工况的工作环境下具备水下互测距工作模式、声学链路信息传输工作模式、主动广播工作模式及被动播发工作模式;并在不同工作模式下,通过声学指令切换的方式实现基准信标主动、被动及多源定位的切换,从而实现多种服务模式集成的定位导航服务;
40.多传感器配置设计:在方舱上设置声呐传感器、惯导传感器、压力传感器、磁力传感器和重力传感器,并将各传感器与基准信标集成,从而实现以声学为主,多源传感器融合下的水下导航工作模式;
41.安全保障设计:对方舱的各组件进行防腐处理以及防泥沙处理;
42.接口设计:每个基准信标至少包括一个机械接口;每个基准站至少包括两个电气接口;
43.最后,针对声呐长距离水下服务问题,选择2khz-4khz/8khz-16khz的双频段作为基准信标工作频率,根据目标传播距离优化导航信号波形,并优选导航信号体制;从而实现深水远距离声学引导、近距离高精度水下服务;针对信息源安全问题,采用水声主动、被动定位模式智能切换方法和授权水下服务技术,构建提供水下声学服务的基准站。其中导航信号波形的优选为具体的信号载波选择,优选信号体制可以理解为编码和信号结构的选择,这里一般是bpsk编码。
44.本实施方式中,基准站的设备可综合集成声呐、imu、压力、温度、盐度、流速等单元,配合发展中频、低频,主动、被动相结合的工作模式,拓展基准网作用范围;同时采用抗压、溢流、稳定、可靠的设计理念,将基准放的稳、布的快、待的久,实现长期的基准服务,为水面/水下用户提供高精度的定位导航服务。
45.本实施方式实现了基准信标多种工作模式的设计。这个过程主要是硬件程序和通信协议上的统一,通常一般基站只有一种工作模式,多模式对硬件需求较高:1)较高的运算能力;2)更大的通信内存需求(信号形式变多);3)对水听器的要求也更高,也就是更高的工作带宽和信噪比等;这是因为主动声呐和被动声呐对声呐需求不一致;4)不同工作模式下协议的统一,由于不能换一个工作模式就换一个工作协议,因此需要更换报文格式。
46.进一步,所述目标传播距离包括长距离、中距离及短距离;
47.通常将水平距离大于30公里的距离作为长距离,处于20至30公里之间的距离作为
中距离,20公里以内的距离作为短距离。
48.一般对于目标传播距离没有明确的划分;信号频率越低传播损失越小,所以传播距离越远。但是在声源足够大的情况下,距离和频率的选择不是绝对的。
49.同样序列和距离的关系也不是绝对的,一般来说序列越长增益越高,距离远的时候就会选择长序列。但是每个序列随着阶数的增加增益也是会提高的。不同序列的区别是构造上的区别,伪随机序列的前身大部分是m序列。从m序列构造出的别的序列的优势一般在于,序列复杂度高,同阶序列数目跟多,适用于多用户场景;对于复杂序列,具有保密性、隐蔽性强的优势;最后要构造互相关性较好的序列,从而实现为多用户服务的目的。
50.本实施方式中,基于声学的水下导航信号波形设计应满足如下目标需求:
51.需能满足不同作用距离和精度需求:从公里级到百公里级的距离需求,要求信号具有较大的时间带宽积和时间分辨力;包括:
52.1)高精度连续定位需求:利用连续定位实现导航跟踪、以及低信噪比下定位;
53.2)多用户数接入需求:能实现多信标定位信号的同时传输,以及水下集群定位;
54.3)军民两用需求:针对军民不同用户,提供不同的导航精度;并对军事用户提供隐蔽接入能力。
55.根据以上需求分析,水下导航系统拟采用直扩序列作为导航信号波形,这是因为直扩序列具有如下特性:
56.1)具有较大的扩频增益:较大的扩频增益可以增加作用距离,或者降低发射功率以提升隐蔽性;
57.2)具有良好的循环自相关特性:时间分辨力好且多普勒敏感,因此适合水下的位置、速度和时间(pvt)测量;
58.3)具有良好的互相关特性:互相关干扰小的序列数较多,可以满足水下导航的多用户需求;
59.4)能满足军民两用不同的隐蔽性和精度需求:扩频增益可以增加隐蔽性,并且通过复合或混沌的直扩序列设计使得信号难以被破译;此外,可以通过直扩序列与伪随机噪声序列叠加的方式,实现不同的导航精度,即对于军事用户不叠加噪声序列,对于服务等级低的用户,可以增大伪随机噪声序列的功率。
60.由于水声传播环境的特殊性,以及水下导航的隐蔽性需求,水下导航的波形设计不能单纯借鉴gnss中的信号波形设计(如采用长度为1023的gold序列,重复20次)。这是因为序列长度越长、扩频增益也就越大,从而增大了作用距离或提升了隐蔽性,但是水声环境的时变特性以及平台运动特性,限制了水声信号的长度及积分时间。
61.因此,在实际应用中,需要根据长距离、中距离、短距离三种模式下的声学传播特性,对信号序列类型,包括gold序列、kasami序列、chu序列,以及复合序列、混沌序列等,以及对信号序列长度等进行详细设计,从而满足不同的需求。
62.再进一步,在安全保障设计中,水下基准站的金属构件在海洋环境中易发生腐蚀,这种腐蚀具有普遍性、隐蔽性、渐进性和突发性的特点。由于海洋环境是一种复杂的腐蚀环境,在这种环境中,海水本身是一种强的腐蚀介质,同时波、浪、潮、流又对金属构件产生低频往复应力和冲击,加上海洋微生物、附着生物及它们的代谢产物等都对腐蚀过程产生直接或间接的加速作用。为防止海洋环境对水下基准站的腐蚀,除正确设计金属构件、合理选
材外,再辅助以下几种方式:
63.其中防腐处理包括:
64.对方舱本体采用厚浆型重防式涂料涂覆;
65.对方舱内组件采用耐腐蚀材料包套,此处可以只对重点部件进行包套;所述重点部件包括1)不耐腐蚀材料为外壳的挂载设备,包括且不限于声学信标、ctd、adcp、海流计等等;2)海底方舱的关键承重部件,包括支架连接处、承重腿等等。
66.对方舱的结构件预留腐蚀余量;所述结构件包括1)方舱海底支架;2)外部设备挂载时的连接件,例如设备的物理接口;
67.根据电化学腐蚀原理,对方舱的易腐蚀件采用牺牲阳极的方式进行预处理;所述易腐蚀件包括所有裸露在外的易腐蚀金属部件。
68.另外,布放在海底的方舱舱体不可避免地受海洋附着生物影响,还需要具有防生物附着的性能。海洋附着生物在生态功能上具有多样性,种类繁多,能够耐受海洋特有的高盐、高压、低营养、低光照等极端条件,是影响海洋设施安全与使用寿命的重要因素。因此,其对金属进行腐蚀的形式和机理也是多样的。针对水下基站,海洋生物的附着一是破坏舱体内部金属构件的漆膜,加速金属构件的腐蚀;二是海洋生物附着在搭载的仪器设备之上,干扰数据信号的传输;三是堵塞舱内仪器传感器探头,影响仪器测量精度。迄今,采用防污涂料喷涂舱体表面方式依然是防止海洋生物附着的经济有效的措施。防污涂料的类型有传统型防污涂料、释放型防污涂料、烧蚀型防污涂料、自抛光防污涂料和自释放型防污涂料。其中自抛光防污涂料有两类:含锡型和无锡型(不含锡)。由于有机锡类防污涂料污染海洋环境,目前只采用无锡型自抛光防污涂料。
69.安全保障设计中,防泥沙处理包括防泥沙淤积:
70.水下基准站在浅海应用时,特别是淤积严重海域应用时受泥沙影响较大,泥沙淤积可致释放装置无法正常释放,甚至有可能整个舱体都被泥沙掩埋,从而导致方舱舱体无法正常回收。本实施方式可通过在方舱的基座支腿以及基座底部侧面开设通水孔,以及提高释放器安装位置的方式抵抗海底泥沙的沉积影响,防止海底泥沙的沉积。同时可使可弃基座承担配重的作用,并具有一定高度;当方舱布放于海底时,海底泥沙将在海流作用下流过基座,而不易在上部仪器舱内形成泥沙淤积,从而有效保护方舱内部仪器。
71.再进一步,结合图2至图4所示,所述接口设计中,机械接口为基准信标用于实现与方舱连接的机械结构接口;所述机械接口与水下基准信标的外形匹配,主要功能是完成海底位置基准信标在水下基站上的便捷、稳固的安装,防止海底位置基准信标在长期工作中产生位移,保证海底位置基准信标能够在深海开展稳定可靠的工作;
72.两个电气接口分别为供电端口和控制端口,其中供电端口包括基准站携带的蓄电池组的电源输出端口,所述电源输出端口的电气参数与基准信标的充电端口的电气参数匹配,为海底位置基准信标提供额外的电源补给;电源输出端口输出的电压为经稳压电路稳压后的电压,可保证信标工作过程中电池组输出电压下降的情况下该供电端口能稳定输出所需电压,该供电端口旨在延长海底位置基准信标的水下工作时间,降低水下基站的布放回收成本,增加水下控制点的隐蔽性;
73.控制端口包括基准站的声学释放模块的声通信端口;所述声通信端口的通信频率为低频9khz到12khz,用于接收声学释放模块对甲板单元的各种指令,并用于控制声学释放
模块的各种动作;同时测量甲板单元与声学释放模块的距离;主要完成水下基准站的回收工作。
74.再进一步,结合图2所示,所述接口设计中,还包括拓展接口,所述拓展接口用于搭载除了水下信标之外的其他仪器设备,包括拓展机械接口和拓展供电接口;
75.为了丰富水下控制点的系统功能,作为示例,拓展接口搭载的仪器设备包括adcp、声速梯度仪和惯导设备,水下基准站提供拓展接口时需根据不同仪器设备的机械特性和电气特性进行设计。
76.再进一步,对于目标传播距离为长距离的基准信标,选择低频工作频段工作;此时对基准信标配置低频声源及高精度原子钟模块,将低频声源靠近声道轴布放;同时,此工作频段受海洋环境及声信道影响严重,作为示例,需配置温、盐、深、流等海洋观测传感器。
77.具体包括:
78.(1)将浮体1配置在500m左右水深,上面主要挂载2个75khz频段的adcp(声学多普勒流速剖面仪)、1个声学记录器和1个ctd传感器(温、盐、深测量仪)。
79.其中adcp用于测量海面和声道轴以上的流速剖面,用于估算整个锚系的姿态情况;
80.声学记录器记录海面附近的噪声情况,用于测量不同频段的声学噪声情况;
81.ctd测量温、盐、深,用于估计声信道传播。
82.(2)浮体2配置在1000m左右水深,声道轴附近。配置低频声学信标、高频声源、同步授时模块、声场计算模块、2个75khz频段的adcp和1个ctd传感器。
83.其中低频声学信标用于收发声学信号,服务于pnt基准体制,声学频率为500hz,声源级约为190db;
84.高频声源用于校准主浮体的位置,通过与海底基准的联合测距定位实现主浮体位置的精确估算。估算位置服务于声场计算模块,为长距离声学定位服务提供精确位置;
85.同步授时模块用于提供高精度时钟信息,在入水前进行授时同步,在水下通过高精度原子钟完成各个声信标的同步,能够根据时钟漂移等进行模型估算;
86.声场计算模块用于估计声信标的布放位置及信道传播情况,一次来提高远距离的声学定位精度;
87.adcp测量声道轴上下的流速剖面,用于精确估算浮体2的姿态情况;
88.ctd测量温、盐、深,用于估计声信道传播。
89.(3)海底配置单点海流计、ctd、浮球、高频声信标和释放器。
90.单点海流计用于测量海底点的流速,估算海底锚系的姿态;
91.ctd测量温、盐、深,用于估计声信道传播;
92.高频声信标用于辅助校准主浮体的位置,通过与主浮体上的高频声源的联合测距定位实现主浮体位置的精确估算;
93.浮球和声学释放器用于试验结束后回收。
94.对于中距离目标传播距离,基准信标工作在中频工作频段2khz~4khz内,整体配置以锚系和坐底平台结合的方式。锚系结构参照长距离声学信标配置,离底布放200~300m,同时在锚系结构周围2~3km的范围内布放4个坐底结构,用于高精度标定锚系平台的位置。
95.坐底结构配置高频声信标、单点海流计、ctd、浮球和释放器。单点海流计用于测量海底点的流速,估算海底锚系的姿态;ctd测量温、盐、深,用于估计声信道传播。浮球和声学释放器用于试验结束后回收。
96.对于短距离目标传播距离,基准信标工作在高频工作频段8khz~16khz内,整体配置以坐底平台方式为主。设计的海底方舱以溢流式框架为主,配置浮球提供上浮回收所需的浮力,同时配置单点海流计、同步授时模块、ctd传感器和声学释放器,根据设计的网形在固定区域内实现高精度定位导航。
97.具体实施例:
98.以在中国南海3000m水域处布设海底位置基准信标为例,进行信号波形设计、工作模式设计、多传感器配置设计、安全保障系统设计、接口方案设计以及集成方案设计。
99.1、信号波形设计:
100.1)采用直扩序列作为导航信号波形;
101.2)选择2s的gold序列,作为通信信号;
102.2、通过声学指令切换的方式实现主动、被动及多源定位切换的方式,具备水下互测距、声学链路信息传输、主动广播、被动播发等多种工作模式。
103.3、基准信标集成温、盐、压、流等海洋观测传感器。
104.4、安全保障系统设计:
105.1)水下平台采用耐海水腐蚀的金属材料,如316l不锈钢和高分子材料如高密度聚乙烯。金属材料方舱的特点是重、稳固、配以专业布放回收设备,涂有防腐蚀涂料,加载牺牲阳极以保护金属支架、外壳、螺丝和仪器不被腐蚀;
106.2)采用无锡型自抛光防污涂料喷涂舱体表面防止海洋生物附着。
107.3)使用基座支腿、基座底部侧面开设通水孔以及提高释放器安装位置的形式抵抗海底泥沙的沉积影响。同时可弃基座承担配重的作用,并具有一定高度,方舱布放于海底时,海底泥沙容易在海流作用下流过基座,而不易在上部仪器舱内形成泥沙淤积,有效保护方舱内部仪器。
108.5、如图2所示海底位置基准信标的必备接口有三个,包括一个机械接口和两个电气接口
109.1)机械接口是指水下信标安装于水下基站的机械结构,该机械接口与使用的水下信标的外形匹配,主要功能是完成海底位置基准信标在水下基站上的便捷、稳固的安装,防止海底位置基准信标在长期工作中产生位移,保证海底位置基准信标能够在深海开展稳定可靠的工作。
110.2)两个电气接口分别为供电端口和控制端口。供电端口是指水下基站携带的蓄电池组的电源输出端口,其电气参数仍然与海底位置基准信标的充电端口的电气参数匹配,为海底位置基准信标提供额外的电源补给,该供电端口前端设有稳压电路,保证信标工作过程中电池组输出电压下降的情况下该供电端口能稳定输出所需电压,该供电端口旨在延长海底位置基准信标的水下工作时间,降低水下基站的布放回收成本,增加水下控制点的隐蔽性。控制端口是指水下基站声学释放模块的声通信端口,其通信频率为低频9khz到12khz,用来接收声学释放模块甲板单元的各种指令,控制水下释放模块的各种动作,测量甲板单元与释放器的距离,主要完成水下基站的回收工作。
111.3)海底位置基准信标的拓展接口搭载的设备包括adcp、声速梯度仪和惯导设备等。
112.针对声呐长距离水下服务问题,选择2khz-4khz/8khz-16khz的双频段工作频率,优化信号波形,优选信号体制,实现深水远距离声学引导、近距离高精度水下服务;针对信息源安全问题,采用水声主动、被动定位模式智能切换方法和授权水下服务技术,构建提供水下声学服务。
113.虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其它所述实施例中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。