1.本发明涉及一种适用于启动一体式马达发电机的发电机控制装置及其发电机启动方法,特别涉及一种无感测器的发电机控制装置及其发电机启动方法。
背景技术:
2.传统便携式发电机系统通常以手拉阀来启动引擎,近年来以按键启动的便携式发电机逐渐成为市场主流,而市场上通常使用直流有刷马达作为动力的启动系统。但由于直流有刷马达有噪音大、易损坏与占空间等缺点,因此便携式发电机系统厂商多朝向使用一体式启动马达发电机(integrated starter generator;isg)系统,亦即将马达发电机在启动时当作马达来启动引擎,在启动引擎后作为发电机使用,以取代传统直流马达的启动系统,但如何有效实现isg与整合现行发电机的电气系统,成为各家厂商技术竞逐的方向。
3.如图1所示为引擎缸内压力示意图,由此图可看出,当引擎活塞p位于压缩上死点cp(compression top)时,缸内压力非常大,因此要带动引擎旋转所需要的扭力需求非常大。通常必须要由马达发电机的转子在阻力低的区域rl正转带动引擎,并利用马达发电机的转动惯量加成来协助越过压缩上死点,方能顺利启动引擎。但是以往的启动方式不外乎:1.检测引擎曲柄位置或马达发电机飞轮位置,2.持续反转固定的弧度,3.检测马达发电机的转速是否降低。其中,上述第1与3点,控制系统需要具有位置或转速的感测器,方能得知马达发电机的转子位置及转速,因此并不适用于无感测器的控制系统。上述第2点,因为转子每一次起始的位置都不尽相同,倘若都持续转动固定的弧度才停止,会造成时间的浪费及多余的功率消耗。
4.为此,如何设计出一种适用于启动一体式马达发电机的发电机控制装置及其发电机启动方法,通过无感测器的发电机控制装置来降低电路成本,且缩短引擎启动的时间,乃为本公开发明人所研究的重要课题。
技术实现要素:
5.本发明的目的在于提供一体式马达发电机的发电机启动方法,解决现有技术的问题。
6.为实现前述目的,本发明所提出的发电机启动方法,通过驱动无位置感测器的马达发电机而带动引擎启动,发电机启动方法包括下列步骤:(a)在速度开回路控制模式投入具有第一频率与第一振幅的第一驱动电流驱动马达发电机反转,且根据马达发电机的驱动电压与第一驱动电流获得第一负载信息。(b)确认第一负载信息是否满足重载条件(c)当判断第一负载信息满足重载条件时,停止反转马达发电机。及(d)正转马达发电机而带动引擎启动。
7.本发明的再另一目的在于提供一种适用于启动一体式马达发电机的发电机控制装置,解决现有技术的问题。
8.为实现前述目的,本发明所提出的发电机控制装置,耦接无位置感测器的马达发
电机,且马达发电机带动引擎启动,发电机控制装置包括:逆变器与控制模块,逆变器接收直流电压,且耦接马达发电机。控制模块耦接逆变器与马达发电机,且提供脉宽调制信号至逆变器,使逆变器转换直流电压为驱动电压与驱动电流而驱动该马达发电机。其中,于马达发电机启动以带动引擎运转的启动模式下,控制模块采用速度开回路控制模式;即控制模块在不参考马达发电机的转速的情况下,根据驱动电压驱动电流是否对应地满足重载条件而调整脉宽调制信号,以控制马达发电机正转或反转而带动引擎启动。
9.本发明的主要目的及技术效果在于,由于本发明的发电机控制装置是于马达发电机的启动模式采速度开回路控制模式,即在不参考马达发电机的转速的情况下提供具有振幅及频率的驱动电流控制马达发电机正转或反转,因此不需要位置感测器或转速信息即可于马达发电机反转的过程估测马达发电机的负载大小,以利马达发电机启动模式的后续控制,相较现有技术使用转速信息来判断马达发电机负载大小的方法,在马达发电机的转子初始位置较靠近负载死点时有更佳的负载预估精准度;且由于发电机控制装置是利用第一负载信息与对应的重载条件作为停止反转的判断依据,因此相较于使用位置感测器将马达转子持续转动一预设弧度的现有技术,可大幅度降低启动引擎的时间与消耗的功率。
10.为了能更进一步了解本发明为实现预定目的所采取的技术、手段及技术效果,请参阅以下有关本发明的详细说明与附图,相信本发明的目的、特征与特点,当可由此得一深入且具体的了解,然而附图仅提供参考与说明用,并非用来对本发明加以限制者。
附图说明
11.图1为引擎缸内压力示意图;
12.图2为本发明适用于一体式马达发电机的发电机控制装置的电路方框图;
13.图3a为本发明马达发电机单相等效电路示意图;
14.图3b为本发明驱动电压与驱动电流投射到dq轴坐标第一实施例的向量示意图;
15.图3c为本发明驱动电压与驱动电流投射到dq轴坐标第二实施例的向量示意图;
16.图4为本发明马达发电机的发电机启动方法;
17.图5a为本发明马达发电机启动引擎时的过程示意图;
18.图5b为本发明马达发电机启动引擎时的第一波形示意图;
19.图5c为本发明马达发电机启动引擎时的第二波形示意图;及
20.图6为本发明启动模式下的波形图。
21.附图标记说明:
22.p
…
引擎活塞
23.cp
…
压缩上死点
[0024]1…
发电机控制装置
[0025]
10
…
逆变器
[0026]
12
…
控制模块
[0027]
122
…
脉宽调制单元
[0028]
124
…
驱动单元
[0029]
124a
…
第一转换单元
[0030]
124b
…
q轴电流控制器
[0031]
124c
…
d轴电流控制器
[0032]
124d
…
第二转换单元
[0033]
126
…
负载检测单元
[0034]
128
…
回路控制单元
[0035]
128a
…
开回路控制单元
[0036]
128b
…
闭回路控制单元
[0037]
130
…
控制单元
[0038]
130a
…
估测单元
[0039]
130b
…
切换单元
[0040]
140
…
低通滤波单元
[0041]2…
马达发电机
[0042]3…
引擎
[0043]
vdr、vdr1~vdr3
…
驱动电压
[0044]
vdc
…
直流电压
[0045]
idr、idr1~idr3
…
驱动电流
[0046]
pwm
…
脉宽调制信号
[0047]
sc1~sc3
…
控制信号
[0048]
sl
…
负载信号
[0049]
sid
…
d轴电流信号
[0050]
siq
…
q轴电流信号
[0051]
svd
…
d轴电压信号
[0052]
svq
…
q轴电压信号
[0053]
vi1
…
第一负载信息
[0054]
vi2
…
第二负载信息
[0055]
vth
…
第一门限值
[0056]
cc
…
控制命令
[0057]
cc1
…
第一控制命令
[0058]
cc2
…
第二控制命令
[0059]
cid、ciq
…
电流命令
[0060]
θr
…
角度命令
[0061]
cs
…
启动命令
[0062]
cclose
…
闭回路控制命令
[0063]
ipeak
…
电流峰值
[0064]f…
频率
[0065]
sp
…
转速
[0066]
ω
…
角速度
[0067]
θe
…
电气角
[0068]
rs
…
等效电阻
[0069]
ls
…
等效电感
[0070]
vrs、vls
…
跨压
[0071]
vz
…
阻抗电压
[0072]
vemf
…
反电动势电压
[0073]
p1、p2、p3
…
点位
[0074]
(s100)~(s200)、i~ii
…
步骤
[0075]
t1~t5
…
时段
具体实施方式
[0076]
兹有关本发明的技术内容及详细说明,配合附图说明如下。
[0077]
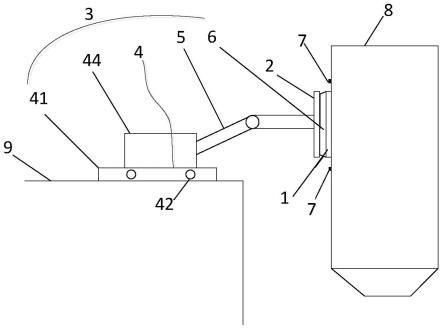
请参见图2为本发明适用于一体式马达发电机的发电机控制装置的电路方框图。发电机控制装置1耦接一体式马达发电机2(integrated starter generator;isg,之后简称马达发电机),且马达发电机2带动引擎3启动。在启动模式下,马达发电机2以马达的形式运行而启动引擎3;在引擎3爆发启动后,再进入发电机模式,由引擎3带动马达发电机2以发电机的形式运行而产生电力。发电机控制装置1在启动引擎3的启动模式时,由直流电压vdc供电而驱动马达发电机2,使马达发电机2运转而启动引擎3。发电机控制装置1在引擎3启动后的发电模式时,引擎3带动马达发电机2而使马达发电机2提供驱动电压vdr1~vdr3(分别代表马达发电机2对应的相次)的信息至发电机控制装置1。
[0078]
发电机控制装置1包括逆变器10与控制模块12,逆变器10一端接收直流电压vdc,且另一端耦接马达发电机2。控制模块12耦接逆变器10,且在启动模式时,控制模块12提供脉宽调制信号pwm控制逆变器10将直流电压vdc转换为交流的驱动电压vdr1~vdr3,以提供驱动电压vdr1~vdr3与驱动电流idr1~idr3驱动马达发电机2。控制模块12包括脉宽调制单元122、驱动单元124、负载检测单元126及回路控制单元128,且脉宽调制单元122耦接逆变器10,脉宽调制单元用以根据控制信号sc1~sc3调制脉宽调制信号pwm。驱动单元124耦接脉宽调制单元122与马达发电机2,且于驱动马达发电机从静止开始反转的过程,根据驱动电压vdr1~vdr3与驱动电流idr1~idr3(分别代表马达发电机2对应的相次)提供第一负载信息vi1。
[0079]
负载检测单元126耦接驱动单元124,且判断第一负载信息vi1的值是否满足重载条件,且根据判断结果提供负载信号sl。其中,于本发明的实施例中,重载条件可以有以下四种但不限于的可能实施方式:第一种为第一负载信息vi1由大于等于第一门限值变化至小于第一门限值;第二种为第一负载信息vi1持续小于第一门限值经过预设时间;第三种为第一负载信息vi1由小于等于第二门限值变化至大于第二门限值;或者,第四种为第一负载信息vi1持续大于第二门限值经过预设时间。当在启动模式下反转马达发电机2的过程中,负载检测单元126判断第一负载信息vi1满足上述重载条件时,提供代表停止反转并开始正转马达发电机2转子的负载信号sl,反之则提供代表反转马达发电机2转子的负载信号sl。回路控制单元128耦接该负载检测单元与该驱动单元,且于速度开回路控制模式下根据该负载信号sl提供驱动马达发电机2正转或反转的控制命令cc至驱动单元124,且控制命令cc包括调控马达发电机2转速的电流命令cid、ciq与调控马达发电机2角度的角度命令θr。驱动单元124根据驱动电流idr1~idr3与控制命令cc产生控制信号sc1~sc3(分别代表马达发电机2对应的相次),使脉宽调制单元122对应地调制适于控置马达发电机2的脉宽调制信
号pwm。
[0080]
驱动单元124包括第一转换单元124a、q轴电流控制器124b、d轴电流控制器124c及第二转换单元124d,且第一转换单元124a耦接逆变器10的输出端与回路控制单元128。第一转换单元124a接收驱动电流idr1~idr3的信息与来自回路控制单元128的角度命令θr,且根据驱动电流idr1~idr3与角度命令θr提供dq轴向的d轴电流信号sid与q轴电流信号siq。q轴电流控制器124b耦接第一转换单元124a、第二转换单元124d及回路控制单元128,且根据q轴电流信号siq与q轴电流命令ciq产生q轴电压信号svq,q轴电压信号svq为驱动电压vdr1~vdr3向量的和对应于dq轴坐标的水平轴(q轴)分量。d轴电流控制器124c耦接第一转换单元124a、第二转换单元124d及回路控制单元128,且根据d轴电流信号sid与d轴电流命令cid产生d轴电压信号svd,d轴电压信号svd为驱动电压vdr1~vdr3向量的和对应于dq轴坐标的垂直轴(d轴)分量。第二转换单元124d耦接脉宽调制单元122与回路控制单元128,且根据q轴电压信号svq、d轴电压信号svd及角度命令θr提供控制信号sc1~sc3至脉宽调制单元122。
[0081]
负载检测单元126用以根据第一负载信息vi1判断马达发电机2的转子是否已反转至引擎3压缩上死点之前的位置,且对应地提供负载信号sl至回路控制单元128,第一负载信息vi1可以为q轴电压信号svq(以虚线表示)或d轴电压信号svd(以实线表示)。具体而言,当转子反转至越靠近压缩上死点时,负载会越重。因此,可以利用负载量的大小判断马达发电机2的转子是否已反转至合适的位置,以确保每次正转启动都有最长的启动行程(具有最大转动惯量来越过压缩上死点)。进一步来说,当负载愈重时,马达电动机输出的机械功率中,实功的比例会越高,意即将驱动电压投射于dq轴上时,其与水平轴q轴的夹角会越小,相对地代表负载信息vi1的d轴电压信号svd会越小,且代表负载信息vi1的q轴电压信号svq会越大。意即,利用负载检测单元126判断第一负载信息vi1的值变化是否满足前述的重载条件,当第一负载信息vi1的值变化满足前述的重载条件时,代表马达发电机2的转子已接近引擎压缩死点,反转至合适的启动位置。借此,能够避免现有技术在马达发电机于启动模式时,无论马达在什么初始位置都让马达的转子转动固定的弧度,而可能造成虚耗能量或产生噪音的问题,因此可降低启动时的功耗以及降低硬件规格;此外,亦不需仰赖位置感测器或转速信息即能更精准地估计马达发电机当下的负载,且根据负载状况自动调整反转时间,节省多余的启动时间。
[0082]
回路控制单元128包括开回路控制单元128a与闭回路控制单元128b,且开回路控制单元128a耦接驱动单元124与负载检测单元126。在启动模式时,开回路控制单元128a不参考估测的马达转速信息,而是根据负载信号sl提供控制马达发电机2正转或反转的第一控制命令cc1与第二控制命令cc2,且第一控制命令cc1与第二控制命令cc2也包括驱动马达发电机2的电流命令cid、ciq。在启动模式,当开回路控制单元128a根据负载信号sl得知第一负载信息vi1的值并未满足前述的重载条件时,代表转子尚未反转至合适的启动位置,则开回路控制单元128a提供用以控制马达发电机2反转的第一控制命令cc1。第一控制命令cc1驱使控制模块12提供的驱动电流idr1~idr3为具有第一频率与第一振幅的第一驱动电流,驱动马达发电机2反转。其中,第一驱动电流的第一频率与第一振幅在经过持续时间后,最终会维持基本上为固定值的第一固定频率与第一固定振幅。例如但不限于,可以先将第一驱动电流的第一频率与第一振幅在持续时间内由0以一斜率逐渐增加等多种方式施行。
由于第一控制命令cc1并未参考马达发电机2的转速作为控制依据,故此控制方法可称为速度开回路控制(i/f控制)模式。
[0083]
当开回路控制单元128a根据负载信号sl得知第一负载信息vi1的值满足前述的重载条件时,代表转子已反转至合适的启动位置。开回路控制单元128a提供用以控制马达发电机2停止并开始正转的第二控制命令cc2。第二控制命令cc2驱使控制模块12提供的驱动电流idr1~idr3为具有第二频率与第二振幅的第二驱动电流,驱动马达发电机2正转。相似于第一驱动电流,第二驱动电流的第二频率与第二振幅在经过持续时间后,会维持基本上为固定值的第二固定频率与第二固定振幅。并且,第二控制命令cc2与第一控制命令cc1相同,并未参考马达发电机2的转速作为控制依据,故一样也是速度开回路控制(i/f控制)模式。其中,第一控制命令cc1与第二控制命令cc2也包括调控马达发电机2角度的角度命令θr,其提供至驱动单元124辅以控制马达发电机2正转与反转的角度。
[0084]
于本发明的一实施例中,开回路控制单元128a更提供启动命令cs至驱动单元124,以对马达发电机2进行激磁对位。具体而言,在发电机控制装置1欲对马达发电机2进行启动模式前,可以先对马达发电机2的转子进行直流激磁对位,以在后续的启动模式时,对转子的运转控制能较为顺利。因此,开回路控制单元128a提供启动命令cs至驱动单元124,使驱动单元124能够投入一个预定角度的电流分量将马达发电机2的转子吸附到此预定角度。
[0085]
于本发明的一实施例中,控制模块12还可在开回路控制单元128a提供第一控制命令cc1与提供该第二控制命令cc2之间,设定预定等待时间。设定预定等待时间的目的在于,等待马达发电机2完全静止时再进行正转的控制,能够驱使马达发电机2带动引擎3启动的过程更加稳定与顺利,以提高引擎3顺利启动的几率。
[0086]
闭回路控制单元128b耦接驱动单元124与负载检测单元126,且根据马达发电机2的转速是否到达预设转速而对马达发电机2进行正转闭回路控制。具体而言,在开回路控制单元128a提供第二控制命令cc2,驱动马达发电机2正转后,且马达发电机2的转速到达预设转速时,代表引擎3已可顺利启动。在此之后,必须要采用反馈控制(例如但不限于pi控制)反馈驱动电流idr1~idr3信息并估测转速信息作为控制依据,方能使马达发电机2稳定的运行。因此,在马达发电机的转速到达预设转速时,改由闭回路控制单元128b提供闭回路控制命令cclose,以对马达发电机2进行正转闭回路控制。其中,闭回路控制命令cclose包括调控马达发电机2转速的电流命令cid、ciq与调控马达发电机2角度的角度命令θr。
[0087]
进一步而言,由于本发明的发电机控制装置1为无感测器的控制装置(无位置),因此在判断马达正转转速是否已达一预设转速,可以由速度开回路控制模式转为闭回路控制模式时,或于闭回路控制模式下,皆需估测马达发电机2的转速及转子位置。因此,控制模块12还包括控制单元130,且控制单元130耦接驱动单元124与回路控制单元128。控制单元130包括估测单元130a与切换单元130b,估测单元130a耦接驱动单元124与切换单元130b,且切换单元130b耦接回路控制单元128。估测单元130a根据对应驱动电流idr1~idr3的d轴电流信号sid、q轴电流信号siq、d轴电压信号svd及q轴电压信号svq估测马达发电机2的角速度ω与电气角θe,且角速度ω即可对应马达发电机2转速。切换单元130b接收角速度ω,且根据角速度ω选择性地将驱动单元124切换耦接至开回路控制单元128a或闭回路控制单元128b,以使回路控制单元128根据马达发电机2的运行状况提供相应的控制命令cc。电气角θe提供至回路控制单元128,使回路控制单元128根据电气角θe提供相应的角度命令θr。进一
步来说,在本发明的一实施例中,于启动模式下,当马达发电机2为静止的初始状态时,驱动单元124预设为耦接至开回路控制单元128a,以对马达发电机2进行速度开回路的反转与正转控制;而当完成前述马达发电机2的反转与正转速度开回路控制流程,且马达发电机2的转速到达预设转速时,切换单元130b才会将驱动单元124切换耦接至闭回路控制单元128b,以对马达发电机2进行后续的闭回路控制。其中,由于本发明的发电机控制装置1省去较于昂贵的感测器(例如但不限于霍尔感测器)的电路成本,因此本发明的发电机控制装置1可实现降低电路成本的技术效果。
[0088]
请参阅图2,在本发明的一实施例中,控制模块12还包括低通滤波单元140。低通滤波单元140耦接驱动单元124与负载检测单元126,且将驱动单元124所提供的第二负载信息vi2(即为q轴电压信号svq或d轴电压信号svd)低通滤波为第一负载信息vi1。具体而言,由于q轴电压信号svq与d轴电压信号svd为具有高频成分的直流信号,其高频成分可能对负载检测单元126造成干扰而发生信号误判的风险,因此通过低通滤波单元140滤除第二负载信息vi2的高频噪声,以提高负载检测单元126判断的精准度。
[0089]
请参阅图3a为本发明马达发电机单相等效电路示意图、图3b为本发明驱动电压与驱动电流投射到dq轴坐标第一实施例的向量示意图、图3c为本发明驱动电压与驱动电流投射到dq轴坐标第二实施例的向量示意图,复配合参阅图2,且反复参阅图3a~3c。在图3a中,vdr1为单相电压、idr1为对应的单相电流、vrs为马达发电机2内部对应相次的等效电阻rs的跨压、vls为马达发电机2内部对应相次的等效电感ls的跨压、vemf为对应相次的反电动势电压,且vz为马达发电机2阻抗电压(即vrs与vls的向量和)。马达发电机2的输出机械功率如下式1所示:
[0090]
pm=ω
×
te
…
(1)
[0091]
其中,pm为马达发电机2的机械输出功率、ω为角速度,且te为马达发电机2的输出转矩,其在马达发电机2的速度维持时,随马达发电机2的转子轴端所承受的负载量而定。当马达发电机2的轴端负载增加时,马达发电机2的输出转矩te也会增加,以维持马达发电机2的定速度的需求,使得马达发电机2的机械输出功率pm上升。另外,马达发电机2的电气输入功率如下式2所示:
[0092][0093]
其中,pe正比于马达发电机2的转子轴端的机械输出功率、”3”为三相(假设每相驱动电压与每相驱动电流相等)、vemf为反电动势电压、θ1为驱动电压vdr1与驱动电流idr1的夹角、θ2为反电动势电压vemf与驱动电流idr1的夹角。并且,马达发电机2的机械输出功率与电气输出功率之间的关系如下式3所示:
[0094]
pm=pe
×
η
…
(3)
[0095]
其中,η为马达发电机2的效率。式2的单相等效电压与电流的关系式,应用在马达发电机2三相电压与电流的轻载与重载的情况下,电压与电流分量的相对关系可分别由图3b与3c表示。图3b对应马达发电机2负载为轻载的状况,且图3c对应马达发电机2负载为重载的状况。当投入的驱动电流idr(为每相电流idr1~idr3的向量和)为具有第一固定频率与第一固定振幅的第一驱动电流(i/f控制)时,逆变器10所提供的驱动电压vdr(为每相电压vdr1~vdr3的向量和)的向量大小与相位将随负载增加而有所变化。其中,特别是驱动电压vdr与驱动电流idr的夹角θ明确反应出负载特性,亦即当机械功因负载上升增加同时亦
可从电气功观测出其负载变化特性。例如但不限于,当轴端(d轴)负载增加时|vi1|=|vdr
·
sinθ|将随之下降(反之亦然)。因此,比较图3b与3c可以发现,第一负载信息vi1为马达发电机2的d轴电压信号或q轴电压信号,且d轴电压信号为驱动电压vdr对应其与驱动电流idr之间一夹角θ的垂直轴(d轴)分量(即投射到d轴上的分量),q轴电压信号为驱动电压vdr对应的水平轴(q轴)分量。在图3b中,驱动电压vdr的垂直轴分量比图3c中的驱动电压vdr的垂直轴分量大,因此图3c的负载量比图3b还要重(水平轴分量恰巧相反)。
[0096]
简而言之,当启动模式时,若先提供一最终为固定振幅与固定频率的驱动电流idr驱动马达发电机2,则当下可通过马达发电机2的机械输出功率反推马达发电机2的负载信息vi及对应的负载量。在得知负载信息vi及对应的负载量后,再对比负载检测单元126所设定的重载条件即可得知马达发电机2转子的位置是否已经靠近压缩上死点cp。其中,负载检测单元126所设定的重载条件即代表负载量已接近压缩上死点cp的预定阈值。
[0097]
进一步而言,d轴电压信号svd为驱动电压vdr对应于垂直水平轴(即dq轴)的垂直轴分量。当负载愈重时,马达电动机输出的机械功率中,实功的比例会越高,负载信息vi1的d轴电压信号svd会越小。因此使用d轴电压信号做为第一负载信息vi1时,当第一负载信息vi1由大于等于第一门限值变化至小于第一门限值,或持续小于第一门限值经过预设时间时,代表满足重载条件(即马达发电机2的转子已接近引擎压缩死点)。反之,q轴电压信号svq为驱动电压vdr对应于垂直水平轴(即dq轴)的水平轴分量。当负载愈重时,马达电动机输出的机械功率中,实功的比例会越高,负载信息vi1的q轴电压信号svq会越大。因此使用q轴电压信号做为第一负载信息vi1时,当第一负载信息vi1由小于等于第二门限值变化至大于第二门限值,或持续大于第二门限值经过预设时间时,代表满足重载条件(即马达发电机2的转子已接近引擎压缩死点)。其中,第一门限值与第二门限值可以设计为相同的数值或不同的数值,其可以依照实际需求做调整。
[0098]
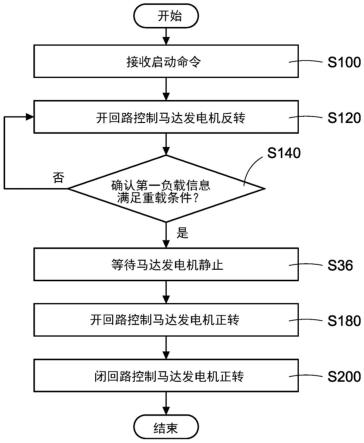
请参阅图4为本发明马达发电机的发电机启动方法,复配合参阅图2~3c。马达发电机2的发电机启动方法首先包括,接收启动命令(s100)。开回路控制单元128a提供启动命令cs至驱动单元124,以对马达发电机2进行激磁对位,使驱动单元124能够投入一个预定角度的电流分量将马达发电机2的转子吸附到此预定角度。然后,开回路控制马达发电机反转(s120)。负载检测单元126用以根据第一负载信息vi1判断马达发电机2的转子是否已反转至引擎3压缩上死点之前的位置,且对应的提供负载信号sl至回路控制单元128,第一负载信息vi1可以为q轴电压信号svq或d轴电压信号svd。开回路控制单元128a提供用以控制马达发电机2反转的第一控制命令cc1,第一控制命令cc1驱使控制模块12提供的驱动电流idr1~idr3为具有最终为固定值的第一频率与第一振幅的第一驱动电流,以速度开回路控制(即反转i/f控制)模式驱使马达发电机2进行反转。其中,控制模块12可包括低通滤波单元140。低通滤波单元140将驱动单元124所提供的第二负载信息vi2(即为q轴电压信号svq或d轴电压信号svd)低通滤波为第一负载信息vi1,以提高负载检测单元126判断的精准度。
[0099]
然后,确认第一负载信息满足重载条件(s140)。当开回路控制单元128a根据负载信号sl得知第一负载信息vi1的值满足重载条件时,代表转子已反转至合适的启动位置。反之,则代表转子尚未反转至合适的启动位置,而须返回步骤(s120)。其中,重载条件的设定差异,端看第一负载信息vi1是使用d轴电压信号svd或q轴电压信号svq。在转子已反转至合适的启动位置时,等待马达发电机静止(s160)。控制模块12可在开回路控制单元128a提供
第一控制命令cc1与提供第二控制命令cc2之间,设定预定等待时间等待马达发电机2静止时再进行正转的控制,能够驱使马达发电2带动引擎3启动的过程更加顺利。其中,使马达发电机2静止的方式可包括顺转静止或以控制的方式煞车。
[0100]
然后,开回路控制马达发电机正转(s180)。开回路控制单元128a提供用以控制马达发电机2正转的第二控制命令cc2,第二控制命令cc2驱使控制模块12提供的驱动电流idr1~idr3为具有最终为固定值的第二频率与第二振幅的第二驱动电流,以速度开回路控制(即正转i/f控制)模式驱使马达发电机2进行正转。最后,在马达发电机的转速到达预设转速时,切换为闭回路控制马达发电机正转(s200)。在开回路控制单元128a提供第二控制命令cc2后,且马达发电机2的转速到达预设转速时,代表引擎3已可顺利启动。在此之后,必须要采用反馈控制(例如但不限于pi控制)反馈马达转速或扭力,方能使马达发电机2稳定的运行。因此,在马达发电机2的转速到达预设转速时,改由闭回路控制单元128b提供闭回路控制命令cclose,以对马达发电机2进行正转闭回路控制(即速度闭回路控制)。其中,马达发电机2的转速是通过控制单元130反馈驱动电流idr1~idr3(此时的驱动电流idr1~idr3为第二驱动电流)的d轴电流信号sid、q轴电流信号siq、d轴电压信号svd及q轴电压信号svq估测马达发电机2的角速度ω与电气角θe而获得。
[0101]
进一步而言,由于本发明的发电机控制装置1是在马达发电机的启动模式下,利用速度开回路控制模式,提供具有最终为固定值的振幅及频率的电流控制马达发电机2正转及反转,因此可以不需要位置感测器或转速信息即可对马达发电机2的负载量进行更精确的估测与后续启动模式的控制,且由于发电机控制装置1是利用第一负载信息与对应的重载条件作为停止反转的判断,因此相较于现有技术,可不需将马达发电机的转子持续转动固定的弧度,进而大幅度降低启动引擎3的消耗功率与时间。
[0102]
请参阅图5a为本发明马达发电机启动引擎时的过程示意图、图5b为本发明马达发电机启动引擎时的第一波形示意图、图5c为本发明马达发电机启动引擎时的第二波形示意图,复配合参阅图2~4,且反复参阅图5a、5b、5c。在图5a中,缸内压力最大的为压缩上死点cp,压缩上死点cp通常也为负载最重的点位。在引擎3尚未启动时,马达发电机2的转子通常会停在两压缩上死点cp之间的谷底位置(假设停在点位p1与p2)。控制模块12首先会通过控制逆变器10而驱动马达发电机2反转(步骤i),然后通过检测马达发电机2的驱动电压vdr1~vdr3与驱动电流idr1~idr3而判断马达发电机2的转子是否已反转至引擎3压缩上死点之前的位置(点位p3),其检测方式是利用第一负载信息vi1是否满足重载条件。在控制模块12得知马达发电机2的转子已反转至点位p3时,控制模块12等待马达发电机2静止。在马达发电机2静止后,控制模块12通过控制逆变器10而驱动马达发电机2正转(步骤ii),以确保正转启动具有最长的启动行程(即具有最大转动惯量来越过压缩上死点cp)。
[0103]
图5b的波形对应图5a中的点位p1,其具有较长的反转距离。其中,虚线为第一负载信息vi1、实线为驱动电流idr,且水平线为第一门限值vth。在时段t1时,发电机控制装置1将马达发电机2进行激磁对位,使马达发电机2的转子定位在点位p1。在时段t2时,发电机控制装置1采用速度开回路控制模式,提供具有第一频率与第一振幅的第一驱动电流至马达发电机2,驱使马达发电机2反转。由图5b可看出,第一驱动电流的第一频率与第一振幅在经过一小段持续时间后,最终会维持基本上为固定值的第一固定频率与第一固定振幅。此时,第一负载信息vi1由小于第一门限值vth提高至大于等于第一门限值vth,且在时段t2与t3
之间,第一负载信息vi1由大于等于第一门限值vth下降至小于门限值vth,马达发电机2的转子旋转至点位p3。在时段t3时,发电机控制装置1等待预定等待时间,待马达发电机2的转子静止。在时段t4时,发电机控制装置1采用速度开回路控制模式,提供具有第二频率与第二振幅的第二驱动电流至马达发电机2,驱使马达发电机2正转。相似于第一驱动电流,第二驱动电流的第二频率与第二振幅在经过一小段持续时间后,最终会维持基本上为固定值的第二固定频率与第二固定振幅。在时段t4与t5之间,马达发电机2的转速已到达预设转速,可以对马达发电机2进行正转闭回路控制。在时段t5时,发电机控制装置1控制马达发电机2进行正转闭回路控制,以进入发电模式。
[0104]
进一步而言,现有技术的无位置感测器发电机启动方法通常都是用”马达转速”来判断当下的负载情况,然而当马达起始位置非常靠近压缩上死点时,因为距离不够,转速不够,导致现有技术的发电机启动方法在负载判断上产生较大误差。然而,本发明在时段t2舍弃用现有技术的”马达转速”来判断负载,而是改用马达发电机所输出的机械功率中实功或虚功的大小(即驱动电压vdr的水平轴分量或垂直轴分量)来判断负载大小。也因为此时不根据马达发电机2转速来控制驱动电流的频率大小,故称为速度开回路控制模式。
[0105]
图5c的波形对应图5a中的点位p2,其具有较短的反转距离。在图5c中,时段t2的宽度较图5b短,其原因在于点位p2离点为p3较近,马达发电机2反转的时间也相对较短。其余的时段,大致上皆与图5b相似,在此不再加以赘述。值得一提,当马达发电机2的转子起始点位恰巧在点位p3时,第一负载信息vi1在时段t2会自始至终始终小于第一门限值vth。因此,当第一负载信息vi1在起始时已小于第一门限值vth,且在驱动电流idr1~idr3经过持续时间成为具有第一固定频率与第一固定振幅的第一驱动电流后,第一负载信息vi1仍然小于第一门限值vth时,即停止反转马达发电机2而进入时段t3。因此,预设时间即可以大致上等于持续时间。请参阅图6为本发明启动模式下的波形图,复配合参阅图2~5c,且反复参阅图5a~6。其中,本实施例的波形图是以图5b的马达发电机启动引擎时的过程为例,图5c或马达发电机2的转子起始点位恰巧在点位p3的波形可依图6的波形类推,在此不再加以赘述。在时段t1时,发电机控制装置1将马达发电机2进行直流激磁对位,因此回路控制单元128所提供的电流命令cid、ciq为直流电流命令(频率为0)控制马达发电机2反转激磁对位。在时段t2时,回路控制单元128所提供的电流命令cid、ciq控制发电机控制装置1提供具有第一频率与第一振幅的第一驱动电流,因此电流命令cid、ciq的电流峰值ipeak(负值)下降直至为一固定值,且频率f上升直至为一固定频率。此时,马达发电机2的转速sp为负值(反转)。第一负载信息vi1(此实施例为使用驱动电压的垂直轴分量svd为例)则由小于门限值vth上升至大于等于第一门限值vth。
[0106]
在时段t2~t3之间,第一负载信息vi1则由大于等于第一门限值vth下降至小于第一门限值vth,符合重载条件,代表马达发电机2的转子已接近压缩上死点cp。在时段t3时,回路控制单元128所提供的电流命令cid、ciq的振幅及频率调整至0,等待马达发电机2的转子静止。在时段t4时,回路控制单元128所提供的电流命令cid、ciq控制发电机控制装置1提供具有第二频率与第二振幅的第二驱动电流,因此电流命令cid、ciq的电流峰值ipeak(正值)上升直至为一固定值,且频率f上升直至为一固定频率。此时,马达发电机2的转速sp为正值(正转)。在时段t5时,马达发电机2的转速sp已到达预设转速,因此对马达发电机2进行正转闭回路控制。
[0107]
值得一提,于本发明的一实施例中,图5b~6的波形以d轴电压信号svd作为第一负载信息vi1示意,其比对为第一负载信息vi1是否小于第一门限值vth。当使用q轴电压信号svq作为第一负载信息vi1时,5b~6的波形及判断的门限值(第二门限值)条件刚好相反,在此不再加以赘述及图示示意。
[0108]
以上所述,仅为本发明优选具体实施例的详细说明与附图,而本发明的特征并不局限于此,并非用以限制本发明,本发明的所有范围应以权利要求为准,凡合于本发明权利要求的构思与其类似变化的实施例,皆应包含于本发明的范围中,任何本领域技术人员在本发明的领域内,可轻易思及的变化或修饰皆可涵盖在本公开的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。