1.本公开涉及控制装置、方法以及程序。
背景技术:
2.以往,已知有当行人开始横穿道路时对周边车辆通知存在行人的技术。例如,在专利文献1中,记载有对与被判断为行人有可能会横穿的道路接近的车辆发送停止委托信号的技术。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2014-225151号公报
技术实现要素:
6.当能够在道路的任意的场所显示人行横道的情况下,存在提高行人在横穿道路时的安全性的余地。
7.本公开的目的在于提高行人在横穿道路时的安全性。
8.本公开涉及的控制装置当检测到想要横穿道路的行人时,使人行横道显示于所述道路,其中,
9.所述控制装置具备控制部,该控制部
10.获取包含表示有无将要进入到所述道路的车辆的信息的车辆信息,
11.根据所述车辆信息,决定是否使所述人行横道显示。
12.本公开涉及的方法由控制装置执行,所述控制装置当检测到想要横穿道路的行人时,使人行横道显示于所述道路,其中,所述方法包括:
13.获取包含表示有无将要进入到所述道路的车辆的信息的车辆信息;以及
14.根据所述车辆信息,决定是否使所述人行横道显示。
15.本公开涉及的程序使作为当检测到想要横穿道路的行人时使人行横道显示于所述道路的控制装置的计算机执行包括如下步骤的动作:
16.获取包含表示有无将要进入到所述道路的车辆的信息的车辆信息;以及
17.根据所述车辆信息,决定是否使所述人行横道显示。
18.根据本实施方式,能够提高行人在横穿道路时的安全性。
附图说明
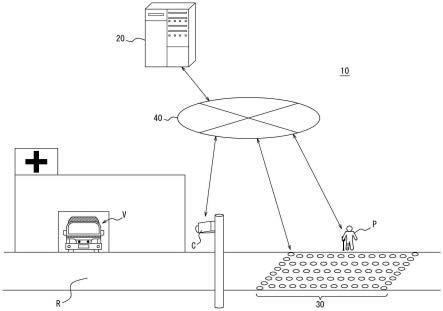
19.图1是示出本实施方式的系统的结构的图。
20.图2是示出本实施方式的控制装置的结构的框图。
21.图3是示出本实施方式的发光装置的结构的框图。
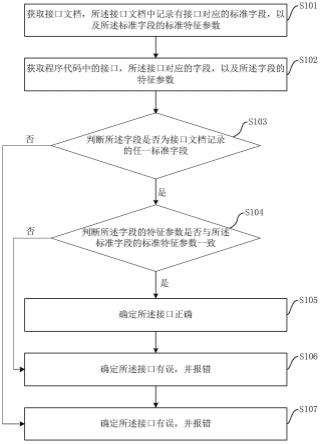
22.图4a是示出由本实施方式的控制装置的控制部进行的处理的图。
23.图4b是示出由本实施方式的控制装置的控制部进行的处理的图。
24.图5是示出作为本实施方式的车辆信息的图像的一个例子的图。
25.符号说明
26.10:系统;20:控制装置;21:控制部;22:存储部;23:通信部;24:输入部;25:输出部;30:发光装置;31:控制部;32:存储部;33:通信部;34:发光部;40:网络。
具体实施方式
27.以下,参照图,说明本公开的实施方式。在各图中,对相同或者相当的部分附加有相同的符号。在本实施方式的说明中,关于相同或者相当的部分,适当地省略或者简化说明。
28.参照图1,说明本实施方式的系统10的结构。
29.本实施方式的系统10具备控制装置20和1个以上的发光装置30。控制装置20能够经由网络40而与发光装置30进行通信。
30.网络40包括因特网、至少1个wan、至少1个man或者它们的组合。“wan”是wide area network(广域网)的简称。“man”是metropolitan area network(城域网)的简称。网络40也可以包括至少1个无线网络、至少1个光网络或者它们的组合。无线网络例如是自组网络、蜂窝网络、无线lan、卫星通信网络或者地上微波网络。“lan”是local area network(局域网)的简称。
31.控制装置20也可以设置于数据中心等设施。控制装置20例如也可以是属于云计算系统或者其它计算系统的服务器。
32.发光装置30具备通信功能以及基于发光元件的发光功能,铺设于道路。发光装置30能够由控制装置20控制,分别对发光元件进行点亮或者熄灭。选择多个发光装置30中的任意一部分,以点亮的方式进行控制。由此,发光装置30能够以表示人行横道的形状的方式进行点亮。行人p能够穿过发光装置30显示的人行横道而横穿道路。
33.首先,说明本实施方式的概要,关于详细内容将在后面叙述。控制装置20当检测到想要横穿道路的行人时,使道路显示人行横道。控制装置20获取包括表示有无将要进入到道路的车辆的信息的车辆信息,根据车辆信息,决定是否使人行横道显示。
34.这样,根据本实施方式,根据表示有无车辆的车辆信息来决定是否使人行横道显示。因此,例如能够在存在将要进入到道路的车辆时,不对行人显示人行横道,在没有车辆时显示人行横道。另外,例如也能够防止即使在面向道路的建筑物之中等行人无法看到的场所存在车辆的情况下也不显示人行横道而行人横穿道路的状况。因而,通过适当地控制显示人行横道的定时,从而能够提高横穿道路时的行人的安全性。
35.接下来,详细地说明系统10的各结构。
36.参照图2,说明本实施方式的控制装置20的结构。控制装置20具备控制部21、存储部22、通信部23、输入部24以及输出部25。
37.作为控制部21,包括至少1个处理器、至少1个专用电路或者它们的组合。处理器是cpu或者gpu等通用处理器或者专门进行特定的处理的专用处理器。“cpu”是central processing unit(中央处理单元)的简称。“gpu”是graphics processing unit(图形处理单元)的简称。专用电路例如是fpga或者asic。“fpga”是field-programmable gate array(现场可编程门阵列)。“asic”是application specific integrated circuit(专用集成电
路)的简称。控制部21一边控制控制装置20的各部分,一边执行与控制装置20的动作有关的处理。
38.作为存储部22,包括至少1个半导体存储器、至少1个磁存储器、至少1个光存储器或者它们中的至少两个种类的组合。半导体存储器例如是ram或者rom。“ram”是random access memory(随机存取存储器)的简称。“rom”是read only memory(只读存储器)的简称。ram例如是sram或者dram。“sram”是static random access memory(静态随机存取存储器)的简称。“dram”是dynamic random access memory(动态随机存取存储器)的简称。rom例如是eeprom。“eeprom”是electrically erasable programmable read only memory(电可擦可编程只读存储器)的简称。存储部22例如作为主存储装置、辅助存储装置或者高速缓存存储器发挥功能。作为存储部22,存储用于控制装置20的动作的信息和通过控制装置20的动作得到的信息。
39.作为通信部23,包括至少1个通信用接口。通信用接口例如是lan接口。通信部23接收用于控制装置20的动作的信息,另外发送通过控制装置20的动作得到的信息。
40.作为输入部24,包括至少1个输入用接口。输入用接口例如是物理键、静电电容键、指向器件、与显示器一体地设置的触摸屏或者麦克风。输入部24受理输入用于控制装置20的动作的信息的操作。输入部24也可以不配备于控制装置20,而作为外部的输入设备连接于控制装置20。作为连接方式,例如能够使用usb、hdmi(注册商标)或者蓝牙(bluetooth(注册商标))等任意的方式。“usb”是universal serial bus(通用串行总线)的简称。“hdmi(注册商标)”是high-definition multimedia interface(高清多媒体接口)的简称。
41.作为输出部25,包括至少1个输出用接口。输出用接口例如是显示器或者扬声器。显示器例如是lcd或者有机el显示器。“lcd”是liquid crystal display(液晶显示器)的简称。“el”是electro luminescence(电致发光)的简称。输出部25输出通过控制装置20的动作得到的信息。输出部25也可以不配备于控制装置20,而作为外部的输出设备连接于控制装置20。作为连接方式,例如能够使用usb、hdmi(注册商标)或者蓝牙(bluetooth(注册商标))等任意的方式。
42.控制装置20的功能通过利用与控制部21相当的处理器来执行本实施方式的控制程序而实现。即,控制装置20的功能通过软件实现。控制程序通过使计算机执行控制装置20的动作,从而使计算机作为控制装置20发挥功能。即,计算机通过依照控制程序而执行控制装置20的动作,从而作为控制装置20发挥功能。
43.程序能够记录于非临时性计算机可读取的介质。非临时性计算机可读取的介质例如是磁记录装置、光盘、光磁记录介质或者半导体存储器。程序的流通例如通过销售、转让或者出借记录有程序的dvd或者cd-rom等便携式记录介质而进行。“dvd”是digital versatile disc(数字多功能光盘)的简称。“cd-rom”是compact disc read only memory(压缩光盘只读存储器)的简称。也可以通过将程序保存于服务器的存储装置,将程序从服务器转送到其它计算机,从而使程序流通。也可以将程序作为程序产品而提供。
44.计算机例如将记录于便携式记录介质的程序或者从服务器转送的程序临时保存于主存储装置。然后,计算机利用处理器来读取保存于主存储装置的程序,利用处理器来执行依照所读取的程序的处理。计算机也可以从便携式记录介质直接读取程序,执行依照程序的处理。计算机也可以每当程序从服务器转送到计算机时,逐次执行依照收取到的程序
的处理。也可以不进行从服务器向计算机的程序的转送,而利用仅通过执行指示以及结果获取实现功能的所谓的asp型的服务来执行处理。“asp”是application service provider(应用服务提供商)的简称。作为程序,是供由电子计算机进行的处理用的信息,包括遵循程序的信息。例如,并非针对计算机的直接的指令,而具有规定计算机的处理的性质的数据相当于“遵循程序的信息”。
45.控制装置20的一部分或者全部的功能也可以通过与控制部21相当的专用电路来实现。即,控制装置20的一部分或者全部的功能也可以通过硬件来实现。
46.参照图3,说明本实施方式的发光装置30的结构。发光装置30具备控制部31、存储部32、通信部33以及发光部34。
47.作为控制部31,包括至少1个处理器、至少1个专用电路或者它们的组合。处理器是cpu或者gpu等通用处理器或者专门进行特定的处理的专用处理器。专用电路例如是fpga或者asic。控制部31一边控制发光装置30的各部分,一边执行与发光装置30的动作有关的处理。控制部31经由通信部33从控制装置20接收使发光部34的发光元件点亮或者熄灭的指示。根据该指示,控制部31对发光部34进行使发光元件点亮或者熄灭的控制。
48.作为存储部32,包括至少1个半导体存储器、至少1个磁存储器、至少1个光存储器或者它们中的至少两个种类的组合。半导体存储器例如是ram或者rom。ram例如是sram或者dram。rom例如是eeprom。存储部32例如作为主存储装置、辅助存储装置或者高速缓存存储器发挥功能。作为存储部32,存储用于发光装置30的动作的信息和通过发光装置30的动作得到的信息。
49.作为通信部33,包括至少1个通信用接口。通信用接口例如是与lte、4g标准或者5g标准等移动通信标准对应的接口、与蓝牙(bluetooth(注册商标))等近距离无线通信对应的接口或者lan接口。“lte”是long term evolution(长期演进)的简称。“4g”是4th generation(第4代)的简称。“5g”是5th generation(第5代)的简称。通信部33接收用于发光装置30的动作的信息,另外发送通过发光装置30的动作得到的信息。
50.发光部34包括至少1个发光元件及其控制电路。发光元件具体而言是led或者有机el等,但不限于此。
51.发光装置30是铆钉状,间断地铺设于道路。发光装置30的露出在道路上的部分用透明的罩体覆盖。由此,当发光部34的发光元件发光时,道路上的行人能够视觉辨认光。在图1中,示出设置于道路r的多个发光装置30的一部分发光而在道路r上显示人行横道。
52.参照图1、图4a、图4b以及图5,说明由本实施方式的控制装置20的控制部21进行的处理的动作。该动作相当于本实施方式的方法。
53.图4a的在步骤s101中,控制装置20的控制部21检测想要横穿道路的行人。
54.作为行人的检测,能够采用任意的手法。例如控制部21也可以经由通信部23从行人使用的终端装置获取道路的横穿请求,将该行人检测为想要横穿道路的行人。或者,控制部21也可以从行人使用的终端装置获取由正在执行的路线引导应用提供的行人的预定前进道路的信息以及表示行人的位置的位置信息。然后,控制部21也可以根据获取到的这些信息将抵达道路附近的行人检测为想要横穿道路的行人。或者,控制部21经由通信部23而与设置于道路的周围并具备荷重传感器的地板进行通信。然后控制部21也可以从该地板利用荷重传感器接收表示行人进行了规定的动作的信号,从而检测行人。在该情况下,作为规
定的动作,例如包括行人用脚按下设置于地板上的横穿请求开关的动作。或者,控制部21也可以经由通信部23而与对道路的周围进行摄影的摄像机进行通信,接收以及解析该摄像机摄影到的图像。然后,控制部21也可以将解析的结果是进行在道路的附近举起手等规定的动作的行人检测为想要横穿道路的行人。
55.例如图1中的行人p将道路r的横穿请求从使用的终端装置发送到控制装置20。控制部21获取该横穿请求,将该行人p检测为想要横穿道路r的行人。
56.在步骤s102中,控制部21经由通信部23获取设置于道路的周围的摄像机摄影到的影像作为车辆信息。
57.摄像机设置于屋内或者屋外。控制部21始终或者定期地经由通信部23接收摄像机摄影到的影像。如图1所示,摄像机c例如设置于作为面向道路r的建筑物的医院h的出口附近,能够对进入到道路r的车辆v进行摄影。不限于图1所示的例子,摄像机c也可以设置于医院h内的停车场。
58.图5示出控制部21从图1的摄像机c接收到的影像的一个例子。在图5的影像中,示出将要从医院h的出口进入到道路r的车辆v。这样车辆信息包括表示有无将要进入到道路的车辆的信息。在图5的影像中,车辆v是急救车。这样车辆信息包括表示车辆是普通车辆以及应急车辆中的哪一种车辆的信息。“应急车辆”是指由于是紧急的工作而需要迅速地移动的车辆。应急车辆具体而言包括急救车、消防车、警车等。“普通车辆”是指应急车辆以外的所有的车辆,具体而言包括自家用车等。
59.车辆信息的形式不限于摄像机摄影到的影像。例如控制部21也可以从车辆自身获取表示车辆的车型的车型信息以及表示车辆的位置的车辆位置信息作为车辆信息。或者,控制部21也可以获取由正在执行的路线引导应用提供的车辆的预定前进道路作为车辆信息。在该情况下,根据在车辆的行进方向前方的预定的距离以内是否存在道路,示出有无将要进入到道路的车辆。或者,控制部21也可以通过从车辆接收车辆所具备的车载摄像机摄影到的影像,从而作为车辆信息而获取。此时,在获取到的影像中,示出从驾驶座观察到的周围的状况,示出该车辆是否将要进入到道路。这样,控制部21能够通过任意的手法获取包括表示有无将要进入到道路的车辆的信息的车辆信息。
60.在步骤s103中,控制部21根据获取到的车辆信息,判断有无将要进入到道路的车辆。在没有将要进入到道路的车辆的情况下,由控制部21进行的处理进入到步骤s107。在存在将要进入到道路的车辆的情况下,由控制部21进行的处理进入到步骤s104。
61.具体而言,控制部21解析作为接收到的车辆信息的影像,判断有无将要进入到道路的车辆。作为影像的解析,能够采用机器学习等任意的图像解析手法。例如根据图5所示的影像,控制部21判断存在将要进入到道路的车辆v的情况。
62.控制部21能够从车辆信息读出的信息不限于此,例如控制部21也可以能够读出关于人是否乘坐到车辆的信息等。由此,控制部21能够判断车辆从面向道路的停车场或者建筑物内出发,在不远的将来进入到道路的情况。
63.在步骤s104中,控制部21判断车辆是普通车辆还是应急车辆。在车辆是应急车辆的情况下,由控制部21进行的处理进入到步骤s105。在车辆是普通车辆的情况下,由控制部21进行的处理进入到图4b所示的步骤s201。
64.具体而言,控制部21解析作为接收到的车辆信息的影像,判断影像中的车辆是普
通车辆还是应急车辆。例如在图5所示的影像中,将要进入到道路的车辆v是急救车。因而,控制部21判断为车辆是应急车辆。控制部21的判断的条件能够自由地设定。例如控制部21也可以根据车辆的车体的形状来判断是应急车辆还是普通车辆。控制部21也可以在车辆设置有警示灯的情况或者车辆发出警笛声的情况下,将车辆判断为是应急车辆,将应急车辆以外的车辆全部判断为是普通车辆。
65.首先,说明在步骤s104中被判断为车辆是应急车辆而控制部21的处理进入到步骤s105的情况。在步骤s105中,控制部21决定不使道路显示人行横道。
66.控制部21也可以在决定不使人行横道显示时,将消除人行横道的信号发送到发光装置30。在该情况下,发光装置30接收信号,如果存在正在点亮的发光部34,则进行熄灭。这样,即使在仍由发光装置30显示人行横道的情况下,也能够可靠地消除人行横道。由此,控制部21能够防止由于显示有人行横道而妨碍应急车辆的移动。
67.接着,在步骤s106中,控制部21判断应急车辆是否与行人的位置远离预定距离。控制部21在直至判断为应急车辆远离预定距离之前重复步骤s106的处理。在判断为应急车辆远离了预定距离的情况下,控制部21的处理进入到步骤s107。
68.具体而言,控制部21首先经由通信部23获取表示行人的位置的位置信息和应急车辆的位置信息。作为这些位置信息的获取,可以采用任意的手法。控制部21例如从行人使用的终端装置以及应急车辆分别接收行人和应急车辆的位置信息而获取。控制部21根据获取到的表示行人的位置的位置信息和应急车辆的位置信息,判断应急车辆的位置是否从行人的位置远离预定的距离。在此,预定的距离是指例如100米的距离。由此,控制部21能够判断是否是应急车辆可靠地远离行人的位置而行人能安全地穿过道路的状况。
69.接着,参照图4b,说明在步骤s104中被判断为车辆是普通车辆而控制部21的处理进入到步骤s201的情况。在步骤s201中,控制部21进而获取关于想要横穿道路的行人是否是健全人的信息,判断行人是否是健全人。在被判断为行人是健全人的情况下,由控制部21进行的处理进入到步骤s202。在被判断为行人不是健全人的情况下,由控制部21进行的处理进入到步骤s205。
[0070]“健全人”是指能够以成人的速度(例如时速3千米的速度)进行步行,身体没有受伤、疾病或者残疾的人。健全人的基准可以自由地设定,在本例中,老年人或者孕妇等最好在步行时被进行支援的人不包含在健全人中。作为关于行人是否是健全人的信息的获取,能够采用任意的手法。例如,控制部21可以经由通信部23从行人使用的终端装置接收终端id。接下来,控制部21从登记于存储部22的数据库读出与终端id对应起来登记的行人信息。在该情况下,作为行人信息,包括关于行人自身的身体的信息。在关于行人自身的身体的信息中,能够由行人预先登记。例如,图1中的行人p的脚骨折。行人p使用终端装置将脚骨折的信息发送到控制装置20。控制装置20将该信息与行人p使用的终端装置的终端id对应起来,预先登记于行人信息。在步骤s201的处理中,控制部21能够从行人信息读出行人p的信息,判断为行人p不是健全人。
[0071]
或者,控制部21也可以通过接收由对行人想要横穿的道路的周围进行摄影的摄像机摄影到的图像,从而获取关于行人是否是健全人的信息。在该情况下,控制部21能够解析图像,判断行人是否是健全人。作为图像的解析,能够采用机器学习等任意的图像解析手法。例如,拄着拐杖的人、坐在轮椅上的人、孕妇、老年人等不被判断为是健全人。除此之外,
也可以在图像解析的结果是被判断为行人带着小孩的情况下,被判断为行人不是健全人。
[0072]
接下来,说明控制部21的处理进入到步骤s202的情况。在步骤s202中,控制部21决定不使道路显示人行横道。步骤s202的处理与图4a的步骤s105的处理相同,所以省略说明。
[0073]
接着,在步骤s203中,判断普通车辆是否使表示向行人所在处的方向或者与行人所在处的方向相反的方向中的某个方向移动的指示灯闪烁。在被判断为使表示向与行人所在处的方向相反的方向移动的指示灯闪烁的情况下,控制部21的处理返回到图4a的步骤s107。另一方面,在被判断为使表示向行人所在处的方向移动的指示灯闪烁的情况下,控制部21的处理进入到步骤s204。
[0074]
作为关于普通车辆是否使表示向行人所在处的方向或者与行人所在处的方向相反的方向中的某个方向移动的指示灯闪烁的信息的获取,能够采用任意的手法。例如,控制部21可以从行人使用的终端装置获取行人的位置信息,进而接收以及解析设置于道路的周围的摄像机摄影到的图像。然后,可以判断普通车辆使指示灯在某个方向闪烁。或者控制部21也可以经由通信部23而与普通车辆进行通信。在该情况下,内置于普通车辆的控制部经由内置于普通车辆的通信部对控制装置20发送表示指示灯的动作的状态的信息。控制部21也可以根据这样从普通车辆接收到的信息,判断普通车辆使指示灯在某个方向闪烁。
[0075]
接着,说明控制部21的处理进入到步骤s204的情况。在步骤s204中,普通车辆向行人所在处的方向移动,判断是否与行人的位置远离预定距离。在被判断为普通车辆向行人所在处的方向移动并且与行人的位置远离预定距离之前,重复步骤s204的处理。在被判断为普通车辆与行人的位置远离预定距离的情况下,控制部21的处理返回到图4a的步骤s107。
[0076]
具体而言,控制部21首先经由通信部23获取表示行人的位置的位置信息和普通车辆的位置信息。作为这些位置信息的获取,可以采用任意的手法。控制部21例如从行人使用的终端装置以及普通车辆分别接收行人和普通车辆的位置信息而获取。控制部21根据获取到的表示行人的位置的位置信息和普通车辆的位置信息,判断普通车辆的位置是否从行人的位置远离预定的距离。在此,预定的距离例如是指100米的距离。由此,能够判断是否是普通车辆通过行人的位置且足够远离行人所在处的位置而行人能够安全地穿过道路的状况。
[0077]
接下来,说明在步骤s201中被判断为行人不是健全人而控制部21的处理进入到步骤s205的情况。在步骤s205中,控制部21决定不使道路显示人行横道。步骤s205的处理与图4a的步骤s105的处理相同,所以省略说明。
[0078]
接着,在步骤s206中,控制部21对普通车辆通知停止,判断普通车辆是否根据通知而停止。在判断为普通车辆根据通知而停止了之前,重复步骤s206的处理。在被判断为普通车辆根据通知而停止的情况下,控制部21的处理结束,返回到图4a的步骤s107。
[0079]
关于向普通车辆通知,可以采用任意的手法。例如控制部21经由通信部23对普通车辆发送通知,以使该普通车辆停止。在该情况下,普通车辆的控制部经由普通车辆的通信部而接收通知,根据通知来控制车辆的各部分,使普通车辆停止。普通车辆的控制部也可以通过声音或者影像告知给驾驶员,以使车辆停止。
[0080]
作为普通车辆根据通知而停止的判断,可以采用任意的手法。例如控制部21获取普通车辆的位置信息,判断普通车辆是否停止了。或者控制部21也可以接收对道路进行摄影的摄像机摄影到的图像并解析图像,从而判断普通车辆是否停止了。或者控制部21也可
以接收普通车辆所具备的车载摄像机摄影到的图像并进行解析,从而判断普通车辆是否停止了。
[0081]
接下来,再次参照图4a,在步骤s107中,判断道路的周围的状况是否满足预定的安全基准。在判断为道路的周围的状况满足预定的安全基准之前,重复步骤s107的处理。在被判断为道路的周围的状况满足预定的安全基准的情况下,控制部21的处理进入到步骤s108。
[0082]
安全基准是指用于行人安全地横穿道路的基准,可以任意地设定。安全基准例如包括在从行人的位置起规定的距离以内,没有在行人想要横穿的道路上以规定的速度以上的速度行驶过来的车辆或者自行车。在该情况下,控制部21经由通信部23从对设置于从行人的位置起规定的范围内的道路进行摄影的摄像机接收图像。规定的范围是指例如500米的距离范围内,但不限于此。控制部21解析接收到的图像,判断有无以规定的速度以上的速度行驶过来的车辆或者自行车。这样控制部21判断是否满足安全基准。或者控制部21也可以经由通信部23从在存在行人的位置的周围行驶的车辆或者自行车获取各自的位置信息,根据该位置信息来检测以规定的速度以上的速度行驶过来的车辆或者自行车。
[0083]
接着,在步骤s108中,控制部21控制发光装置30而使道路显示人行横道。之后,控制部21的处理结束。
[0084]
具体而言,控制部21首先从设置于道路的多个发光装置30之中选择要控制的1个以上的发光装置30。发光装置30的选择除了根据行人的位置之外,还可以根据显示的人行横道的宽度、形状、方向等来进行。发光装置30的位置也可以预先存储于控制装置20的存储部22。控制部21经由通信部23将信号发送到所选择的1个以上的发光装置30,以使发光部34点亮。
[0085]
1个以上的发光装置30各自的控制部31经由通信部33而从控制装置20接收信号,使各个发光部34点亮或者闪烁。发光部34发出的光作为整体而形成人行横道的形状。由此,针对行人而在道路上显示人行横道,行人能够安全地横穿道路。
[0086]
发光装置30除了可以是由发光部34显示人行横道的装置之外,还可以是设置于道路旁边,能够将人行横道的图像投影到道路的任意的场所的投影装置。在该情况下,作为投影装置的发光装置30能够根据来自控制装置20的信号将人行横道的图像投影到道路。
[0087]
如上所述,本实施方式的控制装置20当检测到想要横穿道路的行人时,使道路显示人行横道。控制装置20具备控制部21,该控制部21获取包括表示有无将要进入到道路的车辆的信息的车辆信息,根据车辆信息来决定是否使人行横道显示。
[0088]
控制部21能够依照有无进入到道路的车辆,灵活地决定是否使人行横道显示。能够针对行人,仅在确定不存在车辆时使人行横道显示,所以能够提高行人在横穿道路时的安全性。
[0089]
如上所述,在控制装置20中,控制部21在没有将要进入到道路的车辆的情况下,决定以满足预定的安全基准这一情况为条件使人行横道显示。
[0090]
控制部21能够仅在没有将要进入到道路的车辆、且满足预定的安全基准时使人行横道显示。能够针对行人仅在确定不存在车辆时使人行横道显示,所以能够提高行人在横穿道路时的安全性。
[0091]
如上所述,在控制装置20中,车辆信息包括表示将要进入到道路的车辆是普通车
辆以及应急车辆中的哪个车辆的信息。控制部21在存在将要进入到道路的应急车辆的情况下,决定不使人行横道显示。
[0092]
控制部21在将要进入到道路的车辆是应急车辆的情况下不使人行横道显示。由此,即使在假设应急车辆突然变更行进方向的情况下,也能够防止行人横穿道路,提高行人在横穿道路时的安全性。另外,能够防止人行横道妨碍应急车辆的通行,有助于道路交通变顺畅。
[0093]
如上所述,在控制装置20中,控制部21在应急车辆与行人的位置远离预定距离的情况下,决定以满足预定的安全基准这一情况为条件使人行横道显示。
[0094]
控制部21能够仅在应急车辆移动到从行人的位置远离的场所、且满足预定的安全基准时使人行横道显示。能够针对行人,仅在确定不存在车辆时使人行横道显示,所以能够提高行人在横穿道路时的安全性。
[0095]
如上所述,在控制装置20中,控制部21在普通车辆使表示向与行人所在处的方向相反的方向移动的指示灯闪烁的情况下,决定以满足预定的安全基准这一情况为条件使所述人行横道显示。
[0096]
在普通车辆使表示向与行人所在处的方向相反的方向移动的指示灯闪烁的情况下,普通车辆远离行人所在处的位置,行人能够安全地横穿道路的可能性增加。此时,控制部21以满足预定的安全基准为条件使人行横道显示。由此,无需使行人等待过长时间,就能够提高行人在横穿道路时的安全性。
[0097]
如上所述,在控制装置20中,控制部21在普通车辆向行人所在处的方向移动并与行人的位置远离预定距离的情况下,决定以满足预定的安全基准这一情况为条件使人行横道显示。
[0098]
在普通车辆向行人所在处的方向移动并在通过行人的位置之后远离预定距离的情况下,行人能够安全地横穿道路的可能性增加。此时,控制部21以满足预定的安全基准为条件,使人行横道显示。由此,控制装置20能够使行人在能够确保安全的情况下快速地横穿道路。
[0099]
如上所述,在控制装置20中,控制部21进而获取关于行人是否是健全人的信息,在行人是健全人的情况且存在将要进入到道路的普通车辆的情况下,决定不使人行横道显示。
[0100]
控制部21在行人是健全人且存在将要进入到道路的普通车辆的情况下不使人行横道显示。由此,能够防止未察觉到将要进入到道路的车辆的健全人想要穿过人行横道。因而,能够更可靠地提高行人在横穿道路时的安全性。
[0101]
如上所述,在控制装置20中,控制部21在行人不是健全人的情况且存在将要进入到道路的普通车辆的情况下,决定不使人行横道显示。
[0102]
控制部21在行人不是健全人的情况且存在将要进入到道路的普通车辆的情况下不使人行横道显示。由此,能够防止步行花费时间等特别需要支援的行人在存在将要进入到道路的车辆时想要穿过人行横道。因而,能够更可靠地提高行人在横穿道路时的安全性。
[0103]
如上所述,在控制装置20中,控制部21在对普通车辆通知停止、普通车辆根据通知而停止的情况下,决定以满足预定的安全基准这一情况为条件使所述人行横道显示。
[0104]
控制部21通过在行人横穿道路时对普通车辆通知停止,从而即使在处于如普通车
辆的驾驶员无法视觉辨认行人那样的位置的情况下也能够使驾驶员意识到行人的存在,能够使驾驶员进行注意地驾驶。进而控制部21能够仅在满足预定的安全基准时使人行横道显示,所以能够提高行人在横穿道路时的安全性。
[0105]
如上所述,控制装置20具备通信部23。控制部21经由通信部23获取设置于道路的周围的摄像机摄影到的影像作为车辆信息。
[0106]
控制部21获取摄像机摄影到的图像作为车辆信息并进行解析,从而判断有无车辆。由此,控制部21能够更准确地实时地确认行人想要横穿的道路的周围的状况。因而,能够更可靠地提高行人在横穿道路时的安全性。
[0107]
本公开并不限定于上述实施方式。例如,既可以将框图所记载的多个块进行合并、或者也可以将1个块进行分割。也可以不依照记述按时间序列执行流程图所记载的多个步骤,而是根据执行各步骤的装置的处理能力、或者根据需要并行地或者按照不同的顺序执行。除此之外,能够不脱离本公开的要旨的范围进行变更。
[0108]
例如,控制部21也可以在存在将要进入到道路的普通车辆的情况下,判断想要横穿道路的行人是否着急,根据判断的结果来决定是否显示人行横道。具体而言,控制部21首先在检测到想要横穿道路的行人时,一并检测抵达该道路之前的行人的移动速度。移动速度的检测也可以通过经由通信部23从行人使用的终端装置接收加速度传感器的测定值的记录而进行。或者,控制部21也可以始终获取行人使用的终端装置的位置信息,根据该位置信息来计算过去的平均移动速度。在检测到的行人的移动速度为预定的值以上的情况下,控制部21对普通车辆通知停止。预定的值例如是时速5千米的值。然后控制部21能够以满足预定的安全基准这一情况为条件,使发光装置30显示人行横道。这样,控制部21也可以在存在着急的行人的情况下,使普通车辆停止,在确认安全的基础上,对行人显示人行横道。由此,能够还确保行人的便利性,并提高行人在横穿道路时的安全性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。