1.本发明涉及时间校准技术领域,特别涉及一种远程实时时间校准方法。
背景技术:
2.随着科学技术的发展,高精度时间频率传递在国民经济发展中的地位日趋重要。近年来,随着国防和空间技术的发展,对高精度时间和频率传递提出了更高要求。sdh通信网的时间同步,空中目标的探测和拦截,对时间同步精度要求达纳秒量级。除精度要求之外,很多应用还有时间同步的实时性等要求。由于gnss共视时间传递技术具有设备价格便宜、定时精度高、使用方便的特点,成为解决通信和国防建设事业对高精度时间同步问题的重要手段。
3.gnss共视时间传递技术是一种利用卫星导航系统进行远程时间传递的技术方法。位于不同地点的两个观测站在同一时刻观测同一颗导航卫星,获取各自本地时间与导航系统时间之间的时差,然后通过交换数据求解两站之间的时差。卫星共视时间传递技术消除了卫星钟误差的影响,其传递不确定度为2ns,比gnss单向授时技术的时间测量不确定度缩小一个数量级。
4.gnss共视时间传递技术一般应用于守时系统之间的时间比对,一个典型的卫星共视比对系统如说明书附图中图1所示。a、b两地在同一时刻观测同一颗gnss卫星,gnss接收机输出的秒脉冲即代表gnss时间(gnsst),将其送至接收机的内置时间间隔计数器,并与本地原子钟输出的秒脉冲(代表本地时间)比较。在a地,我们得到本地时刻ta与gnss系统时间gnsst之差。同时,在b地得到tb与gnsst的差。两地通过网络进行数据交换,便可获得两地原子钟之间的时间差。假设两地在同一时刻观测卫星s。于是有
5.a地:δt
as
=t
a-gnsst-da=utc(a)和卫星s的钟差
6.b地:δt
bs
=t
b-gnsst-db=utc(b)和卫星s的钟差
7.共视作差得两站之间的时差为:
8.δt
ab
=δt
as-δt
bs
=(t
a-gnsst-da)-(t
b-gnsst-db)
9.其中,da和db分别为两站与卫星之间的路径时延,该时延主要包括卫星钟差、电离层时延、对流层时延、地球自转效应、天线相位中心偏差和多路径效应、接收机时延等。其中,卫星钟差可在两站交换数据时相互抵消;电离层时延、对流层时延、地球自转效应均可用相应的模型公式进行修正;接收机时延可通过相对校准和绝对校准两种方式修正;在gnss共视技术中,天线相位中心偏差和多路径效应主要通过天线的选择和安装来消除。
10.但是,传统的gnss共视技术尚具有如下缺陷:一是传统共视技术多基于gps每16min输出1个测量结果,不能满足实时性要求。传统的gnss共视技术以16分钟为1个观测周期。其中前2分钟准备,中间13分钟连续跟踪,最后1分钟处理。前后共3分钟的跟踪盲区造成数据浪费。二是文件交互的方式不利于数据实时交换。传统共视技术将比对结果写入cggtts文件,远程通过ftp技术进行文件交互,进而实现共视数据的比对。这种数据事后交换处理模式导致比对结果生成严重滞后,不满足实时性要求。因此需要一种基于北斗的时
间和频率的现场校准和实时量值传递技术和方法。
技术实现要素:
11.有鉴于此,本发明的目的是提供一种基于北斗的远程实时时间校准方法,以实现时间统一设备的远程时间溯源,解决时间统一设备的现场校准及时间统一问题。
12.本发明基于北斗的远程实时时间校准方法,包括步骤:
13.1)时统设备校准仪器的共视接收机a和被校准时间设备的共视接收机b在相同的时刻接收同一颗导航卫星发送的秒脉冲数据;
14.2)分别对共视接收机a和共视接收机b接收的秒脉冲数据序列进行降噪处理,所述降噪处理包括:在数据序列到达后先存入数据缓冲区以等待滑动窗,进入滑动窗后采用中位数探测法对数据序列进行初步的粗差探测,比较yi和m n
×
mad的大小,其中yi为频率数据,m为数据序列的中位数,mad为数据序列的中位数绝对偏差,n为倍数,当yi>(m n
×
mad)时,就认为是粗差点,利用最小二乘拟合算法对粗差值进行修正;最后用kalman滤波算法对滑动窗口内的数据进行滤波处理;
15.3)时统设备校准仪器的原子钟a向时统设备校准仪器的时间间隔计数器a发送秒脉冲,共视接收机a将降噪处理后的秒脉冲数据发送给时间间隔计数器a,时间间隔计数器a做如下计算:
16.δt
as
=t
a-gnsst-da17.其中,ta为原子钟a向时间间隔计数器a发送的秒脉冲数据,gnsst为共视接收机a向时间间隔计数器a发送的秒脉冲数据,da为时统设备校准仪器与卫星之间的路径时延;
18.被校准时间设备的原子钟b向被校准时间设备的时间间隔计数器b发送秒脉冲,共视接收机b将降噪处理后的秒脉冲数据发送给时间间隔计数器b,时间间隔计数器b做如下计算:
19.δt
bs
=t
b-gnsst-db20.其中,tb为原子钟b向时间间隔计数器b发送的秒脉冲数据,gnsst为共视接收机b向时间间隔计数器b发送的秒脉冲数据,db为被校准时间设备与卫星之间的路径时延;
21.4)时统设备校准仪器的数据处理模块a对时间间隔计数器a输出的数据进行连续不间断的跟踪和处理,被校准时间设备的数据处理模块b对时间间隔计数器b输出的数据进行连续不间断的跟踪和处理:
22.跟踪周期为100s,当上一个跟踪周期结束后,立即进入下一个跟踪周期;
23.每个跟踪周期结束后立即对该周期内的数据进行处理:第一步,将100个数据分成10组,每组10个点,对10组数分别使用二次多项式拟合选取中点处的值;第二步,将第一步得到的10个中点处的值线性拟合再次取中点处的值,该值即为本次跟踪历元的测量结果;
24.5)数据处理模块a和数据处理模块b将每次跟踪历元的测量结果编译成b码并通过网络发送给时统设备校准仪器,或者数据处理模块a和数据处理模块b分别将每次跟踪历元的测量结果编译成b码并通过北斗短报文模块发送给卫星,卫星再将数据发送给时统设备校准仪器;
25.6)时统设备校准仪器的b码解调单元将接收到的数据处理模块a发送的b码解调为1pps信号,该1pps信号作为基准1pps信号;
26.时统设备校准仪器的b码解调单元将接收到的数据处理模块b发送的b码解调为1pps信号,该1pps信号作为被测1pps信号;
27.时统设备校准仪器再通过时间间隔计数器测量解调后的被测1pps信号与基准1pps信号之间的时差,从而得到时统设备校准仪器和被校准时间设备之间的时差。
28.进一步,所述步骤5)中,北斗短报文模块将数据发送给卫星时,数据格式设计为:
[0029][0030]
所述步骤5)中,卫星将数据发送给时统设备校准仪器时,数据格式设计为:
[0031][0032]
本发明的有益效果:
[0033]
1、由于卫星电波信号受到电离层、对流层等的影响,在共视观测数据中存在很强的噪声。本发明基于北斗的远程实时时间校准方法,采用滑动窗口粗差探测和kalman滤波相结合的方式进行降噪处理,提高了信噪比,进而有利于后续对信号进行准确跟踪和处理。
[0034]
2、传统共视技术多基于gps每16min输出1个测量结果,不能满足实时性要求。本发明基于北斗的远程实时时间校准方法,采用以100s为周期的连续观测法进行快速共视,当上一个跟踪周期结束后,立即进入下一个跟踪周期,提高了数据利用率,增强了共视的实时性;且因不再预留相邻跟踪周期之前的准备时间和数据处理时间,弥补了传统共视存在跟踪死区的不足。
[0035]
3、本发明基于北斗的远程实时时间校准方法,采用基于网络和基于北斗短报文两种方式进行共视数据的实时传递,能更好的满足不同情况下时间统一设备的需求。对于能接入网络的时统设备校准仪器,可选择网络传输形式;北斗短报文则是利用北斗卫星自身的通信功能完成数据传输,可满足特殊环境下时统设备校准仪器的实时数据交互需求。
[0036]
且对于采用北斗短报文进行共视数据的实时传递时,本发明通过合理的定义数据格式,设计实时比对时的数据交换协议标准,保证了传输过程中数据的完整性,提高了数据传输的效率。
[0037]
4、本发明基于北斗的远程实时时间校准方法,可为时频计量站提供远距离时间传递和频率实时校准服务,能有效的解决原子频率标准送检时间长,送检困难以及送检可靠性低的问题,实现频率标准不搬运送检,不仅有利于时频校准实验室频率标准的有效利用,也确保了量值传递的准确性及可靠性,提高时间频率计量检定质量和效率,有效的降低了时间、人力、物力和经费等。
附图说明
[0038]
图1为gnss卫星共视时间传递系统框图;
[0039]
图2为以100s为观测周期的数据处理过程图;
[0040]
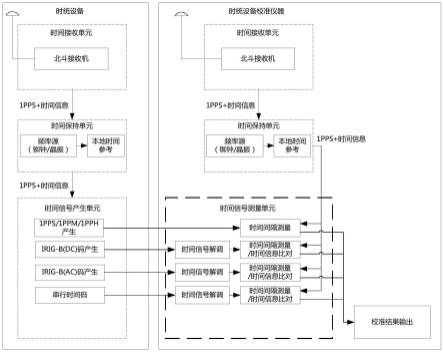
图3为时统设备校准原理框图。
具体实施方式
[0041]
下面结合附图和实施例对本发明作进一步描述。
[0042]
本实施例中基于北斗的远程实时时间校准方法,包括步骤:
[0043]
1)时统设备校准仪器的共视接收机a和被校准时间设备的共视接收机b在相同的时刻接收同一颗导航卫星发送的秒脉冲数据。
[0044]
2)分别对共视接收机a和共视接收机b接收的秒脉冲数据序列进行降噪处理,所述降噪处理包括:在数据序列到达后先存入数据缓冲区以等待滑动窗,进入滑动窗后采用中位数探测法对数据序列进行初步的粗差探测,比较yi和m n
×
mad的大小,其中yi为频率数据,m为数据序列的中位数,mad为数据序列的中位数绝对偏差,n为倍数,当yi>(m n
×
mad)时,就认为是粗差点,利用最小二乘拟合算法对粗差值进行修正;最后用kalman滤波算法对滑动窗口内的数据进行滤波处理。
[0045]
3)时统设备校准仪器的原子钟a向时统设备校准仪器的时间间隔计数器a发送秒脉冲,共视接收机a将降噪处理后的秒脉冲数据发送给时间间隔计数器a,时间间隔计数器a做如下计算:
[0046]
δt
as
=t
a-gnsst-da[0047]
其中,ta为原子钟a向时间间隔计数器a发送的秒脉冲数据,gnsst为共视接收机a向时间间隔计数器a发送的秒脉冲数据,da为时统设备校准仪器与卫星之间的路径时延。
[0048]
被校准时间设备的原子钟b向被校准时间设备的时间间隔计数器b发送秒脉冲,共视接收机b将降噪处理后的秒脉冲数据发送给时间间隔计数器b,时间间隔计数器b做如下计算:
[0049]
δt
bs
=t
b-gnsst-db[0050]
其中,tb为原子钟b向时间间隔计数器b发送的秒脉冲数据,gnsst为共视接收机b向时间间隔计数器b发送的秒脉冲数据,db为被校准时间设备与卫星之间的路径时延。
[0051]
4)时统设备校准仪器的数据处理模块a对时间间隔计数器a输出的数据进行连续不间断的跟踪和处理,被校准时间设备的数据处理模块b对时间间隔计数器b输出的数据进行连续不间断的跟踪和处理:
[0052]
跟踪周期为100s,当上一个跟踪周期结束后,立即进入下一个跟踪周期。
[0053]
如图2所示,每个跟踪周期结束后立即对该周期内的数据进行处理:第一步,将100个数据分成10组,每组10个点,对10组数分别使用二次多项式拟合选取中点处的值;第二步,将第一步得到的10个中点处的值线性拟合再次取中点处的值,该值即为本次跟踪历元的测量结果。
[0054]
5)数据处理模块a和数据处理模块b将每次跟踪历元的测量结果编译成b码并通过网络发送给时统设备校准仪器,或者数据处理模块a和数据处理模块b分别将每次跟踪历元的测量结果编译成b码并通过北斗短报文模块发送给卫星,卫星再将数据发送给时统设备
校准仪器。
[0055]
本步骤5)中,北斗短报文模块将数据发送给卫星时,数据格式设计为:
[0056][0057]
所述步骤5)中,卫星将数据发送给时统设备校准仪器时,数据格式设计为:
[0058][0059]
6)时统设备校准仪器的b码解调单元将接收到的数据处理模块a发送的b码解调为1pps信号,该1pps信号作为基准1pps信号。
[0060]
时统设备校准仪器的b码解调单元将接收到的数据处理模块b发送的b码解调为1pps信号,该1pps信号作为被测1pps信号。
[0061]
解调信号过程中,利用时间间隔计数器判断输入b码信号的脉宽,b码解调单元将b码信号分解为帧标志位“p码”、数据“0”、数据“1”。利用帧标志位判断帧头,然后将各数据位存入相应的存储器获得各时间信息,根据帧头位置获取1pps。
[0062]
时统设备校准仪器再通过时间间隔计数器测量解调后的被测1pps信号与基准1pps信号之间的时差,从而得到时统设备校准仪器和被校准时间设备之间的时差。
[0063]
本基于北斗的远程实时时间校准方法时差比对数据存储周期1s;异地数据交互周期:网络传输1s;北斗短报文120s。本发明基于北斗的远程实时时间校准方法,可为时频计量站提供远距离时间传递和频率实时校准服务,能有效的解决原子频率标准送检时间长,送检困难以及送检可靠性低的问题,实现频率标准不搬运送检,不仅有利于时频校准实验室频率标准的有效利用,也确保了量值传递的准确性及可靠性,提高时间频率计量检定质量和效率,有效的降低了时间、人力、物力和经费等。
[0064]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。