1.本公开总体上涉及通信系统。更特别地,本公开涉及一种可以用于调节基站天线(特别是高频段的无线天线)的移相器的远程电调倾角的传动机构。
背景技术:
2.蜂窝通信系统用于向固定和移动用户提供无线通信。蜂窝通信系统可以包括多个基站,每个基站为指定的覆盖区域(通常称为“小区”)提供无线蜂窝服务。每个基站可以包括一个或多个基站天线,该基站天线用于向位于由该基站服务的小区内的用户发射射频(“rf”)信号,并从该用户接收rf信号。基站天线是定向设备,其能够将在某些方向上发射或从某些方向上接收的rf能量进行集中。
3.现代基站天线通常包括两个、三个或更多个线性(或平面)阵列的辐射元件,其中每个线性阵列具有可电子调节的下倾角。线性阵列通常包括交叉极化辐射元件,并且设置了单独的移相器用于针对每个极化电子地调节天线波束的下倾角,使得天线可以包括两倍于线性阵列的移相器。可以在天线中设置远程电调倾角(“ret”)致动器和相关联的传动机构来调节移相器。
4.随着通信技术的发展,出现了高频段的无线天线。为了调节这种高频段的无线天线的移相器的远程电调倾角,需要精度更加高的传动机构。比如,期望能够将传动机构的调节精度控制在-0.5mm至 0.5mm的范围内。传动机构的调节精度在一定程度上受制造公差和/或由制造公差导致的组装公差的影响,因此,需要尽可能地减小传动机构的制造公差和/或组装公差。
技术实现要素:
5.本公开的目的之一是提供一种用于基站天线的传动机构,其至少能够通过减小由制造公差导致的组装公差来提高其调节精度。
6.在本公开的第一方面,提供了一种用于基站天线的传动机构。所述传动机构包括马达、由马达驱动的螺杆、可移动地安装在螺杆上的可移动元件、和连杆接合元件,所述可移动元件构造成在所述螺杆旋转时沿着所述螺杆的轴向方向移动,所述连杆接合元件构造成与所述可移动元件固定连接并能够与所述可移动元件一起轴向移动;其中,所述传动机构包括圆筒形的限制元件,所述限制元件的端面上设置有用于将所述可移动元件限制在零点位置的限制部,并且所述限制元件的内表面具有多边形结构,所述多边形结构适于与设置在所述螺杆上的多边形部分配合而能够防止所述螺杆相对于所述限制元件旋转。
7.根据本公开的一个实施例,所述限制元件的限制部构造成从所述限制元件的端面的一部分沿着轴向方向延伸的凸出部,所述凸出部形成从所述限制元件的端面沿着所述轴向方向延伸的限制表面。
8.根据本公开的一个实施例,所述可移动元件设置有用于与所述限制元件的限制表面相配合的抵接表面。
9.根据本公开的一个实施例,所述限制元件包括十边形内表面,并且所述螺杆的多边形部分包括与所述限制元件的十边形内表面相配合的十边形外表面。
10.根据本公开的一个实施例,所述螺杆包括抵接元件,所述抵接元件构造成抵接所述限制元件的端面,以阻止所述限制元件沿着朝向所述马达的方向轴向移动。
11.根据本公开的一个实施例,所述抵接元件呈弹性指状件的形式。
12.根据本公开的一个实施例,所述弹性指状件能够径向向外偏转而处于偏转构造并且能够径向向内复原而返回初始构造,在所述偏转构造中,所述限制元件能够被接收在所述抵接元件的内部空间中,而在所述初始构造中,所述抵接元件能够抵接所述限制元件的端面。
13.根据本公开的一个实施例,所述可移动元件包括位于中央的螺纹孔和位于所述螺纹孔的两侧的两个连接凸缘,所述连杆接合元件包括位于其两端的两个连接表面,所述可移动元件的两个连接凸缘能够分别与所述连杆接合元件的两个连接表面紧固在一起。
14.根据本公开的一个实施例,所述可移动元件和所述连杆接合元件能够错位配合。
15.根据本公开的一个实施例,所述可移动元件的每个连接凸缘和所述连杆接合元件的每个连接表面均设置有沿着所述螺杆的轴向方向分布、并且沿着垂直于所述螺杆的轴向方向的纵向方向延伸的多个齿以及位于相邻的齿之间的多个狭槽,所述可移动元件的齿能够被容纳在所述连杆接合元件的相应狭槽中,并且所述连杆接合元件的齿能够被容纳在所述可移动元件的相应狭槽中。
16.根据本公开的一个实施例,所述连杆接合元件的每个连接表面上的最外侧的两个齿具有大于所述连杆接合元件的每个连接表面上的其它齿的轴向尺寸。
17.根据本公开的一个实施例,所述可移动元件的每个连接凸缘和所述连杆接合元件的每个连接表面均设置有用于容纳紧固元件的孔,所述可移动元件的孔和/或所述连杆接合元件的孔具有沿着所述螺杆的轴向方向延伸的长形形状。
18.在本公开的第二方面,提供了一种用于基站天线的传动机构。所述传动机构包括马达、由马达驱动的螺杆、可移动地安装在螺杆上的可移动元件、和连杆接合元件,所述可移动元件构造成在所述螺杆旋转时沿着所述螺杆的轴向方向移动,所述连杆接合元件构造成与所述可移动元件固定连接并能够与所述可移动元件一起轴向移动;其中,所述可移动元件和所述连杆接合元件被构造成能够沿着轴向方向错位配合。
19.根据本公开的一个实施例,所述可移动元件包括位于中央的螺纹孔和位于所述螺纹孔的两侧的两个连接凸缘,所述连杆接合元件包括位于其两端的两个连接表面,所述可移动元件的两个连接凸缘能够与所述连杆接合元件的两个连接表面错位地紧固在一起,以实现所述可移动元件和所述连杆接合元件的错位配合。
20.根据本公开的一个实施例,所述可移动元件的每个连接凸缘和所述连杆接合元件的每个连接表面均设置有沿着所述螺杆的轴向方向分布、并且沿着垂直于所述螺杆的轴向方向的纵向方向延伸的多个齿以及位于相邻的齿之间的多个狭槽,所述可移动元件的齿能够被容纳在所述连杆接合元件的相应狭槽中,并且所述连杆接合元件的齿能够被容纳在所述可移动元件的相应狭槽中。
21.根据本公开的一个实施例,所述连杆接合元件的每个连接表面上的最外侧的两个齿具有大于所述连杆接合元件的每个连接表面上的其它齿的轴向尺寸。
22.根据本公开的一个实施例,所述可移动元件的每个连接凸缘上的所述多个齿的轴向分布宽度小于所述连杆接合元件的每个连接表面上的所述多个齿的轴向分布宽度。
23.根据本公开的一个实施例,所述可移动元件的每个连接凸缘和所述连杆接合元件的每个连接表面均设置有用于容纳紧固元件的孔,所述可移动元件的孔和/或所述连杆接合元件的孔具有沿着所述螺杆的轴向方向延伸的长形形状。
24.要注意的是,针对一个实施例描述的本公开的各方面可以被包含到其它不同的实施例中,尽管没有针对所述其它不同的实施例进行具体描述。换言之,可以以任何方式和/或组合来组合所有实施例和/或组合任意实施例的特征,只要它们不相互矛盾即可。
附图说明
25.在结合附图阅读下文的具体实施方式后,将更好地理解本公开的多个方面,在附图中:
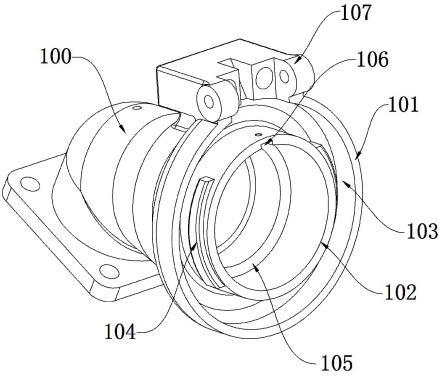
26.图1a是根据本公开的一个实施例的传动机构的示意性透视图;
27.图1b是根据本公开的一个实施例的、安装有图1a所示的传动机构的基站天线的示意性透视;
28.图2是图1a所示的传动机构的局部放大图;
29.图3是图1a所示的传动机构的由螺杆驱动的可移动元件的示意性透视图;
30.图4a是图1a所示的传动机构的连杆接合元件的示意性透视图;
31.图4b是图1b所示的局部a的放大图,其示出了连杆接合元件与移相器的连杆之间的接合;
32.图5是图1a所示的传动机构的螺杆的示意性透视图;
33.图6是图1a所示的传动机构的限制元件的示意性透视图;
34.图7是根据本公开的另一个实施例的传动机构的示意性透视图;
35.图8是图7所示的传动机构的由螺杆驱动的可移动元件的示意性透视图;
36.图9是图7所示的传动机构的连杆接合元件的示意性透视图;
37.图10是图8所示的可移动元件和图9所示的连杆接合元件彼此配合时的示意性平面图。
38.应当理解的是,在所有附图中,相同的附图标记表示相同的元件。在附图中,清楚起见,某些特征的尺寸可以改变而未按比例绘制。
具体实施方式
39.以下将参照附图描述本公开,其中的附图示出了本公开的若干实施例。然而应当理解的是,本公开可以以多种不同的方式呈现出来,并不局限于下文描述的实施例;事实上,下文描述的实施例旨在使本公开的公开内容更为完整,并向本领域技术人员充分说明本公开的保护范围。还应当理解的是,本文公开的实施例能够以各种方式进行组合,从而提供更多额外的实施例。
40.应当理解的是,说明书中的用辞仅用于描述特定的实施例,并不旨在限定本公开。说明书使用的所有术语(包括技术术语和科学术语)除非另外定义,均具有本领域技术人员通常理解的含义。为简明和/或清楚起见,公知的功能或结构可以不再详细说明。
41.说明书使用的单数形式“一”、“所述”和“该”除非清楚指明,均包含复数形式。说明书使用的用辞“包括”、“包含”和“含有”表示存在所声称的特征,但并不排斥存在一个或多个其它特征。说明书使用的用辞“和/或”包括相关列出项中的一个或多个的任意和全部组合。
42.在说明书中,称一个元件位于另一元件“上”、“附接”至另一元件、“连接”至另一元件、“联接”至另一元件、或“接触”另一元件等时,该元件可以直接位于另一元件上、附接至另一元件、连接至另一元件、联接至另一元件或接触另一元件,或者可以存在中间元件。
43.在说明书中,术语“第一”、“第二”、“第三”等仅用于便于说明而不旨在限定。任何由“第一”、“第二”、“第三”等表示的技术特征均是可互换的。
44.在说明书中,诸如“上”、“下”、“前”、“后”、“顶”、“底”等的空间关系用辞可以说明一个特征与另一特征在附图中的关系。应当理解的是,空间关系用辞除了包含附图所示的方位之外,还包含装置在使用或操作中的不同方位。例如,在附图中的装置倒转时,原先描述为在其它特征“下方”的特征,此时可以描述为在其它特征的“上方”。装置还可以以其它方式定向(旋转90度或在其它方位),此时将相应地解释相对空间关系。
45.本公开涉及一种用于基站天线的传动机构、特别是一种用于高频段的无线天线的传动机构。本公开的传动机构可以用于调节基站天线的移相器的远程电调倾角。本公开的传动机构可以至少通过减小由制造公差导致的组装公差来提高其调节精度。
46.图1a至图6示出了根据本公开的一个实施例的传动机构10。传动机构10可以包括马达101、由马达驱动的螺杆102、可移动地安装在螺杆102上的可移动元件103、和连杆接合元件104。可移动元件103构造成在螺杆102旋转时沿着螺杆102的轴向方向移动。连杆接合元件104可以与可移动元件103固定连接并因此能够与可移动元件103一起轴向移动。连杆接合元件104还可以与用于驱动基站天线1的移相器组件2的调节元件的连杆3接合(可参见图1b和图4b),从而通过驱动连杆来调节移相器组件2中的移相器的倾角。
47.传动机构10可以安装在基站天线1的移相器组件2上来驱动移相器,如图1b所示。在根据本公开的一个实施例中,传动机构10可以安装在支撑板105上。如图1a所示,传动机构10的马达101、螺杆102和可移动元件103可以位于支撑板105的一侧,而传动机构10的连杆接合元件104可以位于支撑板105的另一侧。因此,支撑板105可以在可移动元件103和连杆接合元件104之间延伸通过。支撑板105可以固定在移相器组件2上。
48.参照图3,在根据本公开的一个实施例中,可移动元件103可以构造为沿着横向于螺杆102的方向延伸的长形元件。可移动元件103可以包括位于中央的螺纹孔1031和位于螺纹孔1031两侧的两个连接凸缘1032。螺杆102可以延伸穿过可移动元件103的螺纹孔1031。设置在螺杆102上的外螺纹与设置在螺纹孔1031内的内螺纹可以彼此啮合。这样,当螺杆102旋转时,可移动元件103能够沿着螺杆102的轴向方向移动。可移动元件103的每个连接凸缘1032均可以构造成平板状。在每个连接凸缘1032上可以设置有适于容纳紧固元件的一个或多个孔1033。紧固元件(比如,螺栓或螺钉)可以延伸穿过孔1033而将可移动元件103和连杆接合元件104彼此固定。可移动元件103还可以包括位于两个连接凸缘1032之间的凹陷部1034,使得支撑板105能够从可移动元件103的两个连接凸缘1032之间延伸通过。
49.参照图4a,在根据本公开的一个实施例中,连杆接合元件104可以构造为沿着横向于螺杆102的方向延伸的长形元件。连杆接合元件104可以包括位于其两端的两个连接表面
1041。连杆接合元件104的两个连接表面1041可以构造成分别与可移动元件103的相应的连接凸缘1032相对应。在每个连接表面1041上均可以设置有适于容纳紧固元件的一个或多个孔1042。孔1042可以构造成与可移动元件103的相应的连接凸缘1032上的孔1033相对应,这样,紧固元件(比如,螺栓或螺钉)可以延伸穿过可移动元件103的孔1033和连杆接合元件104的孔1042而将可移动元件103和连杆接合元件104彼此固定。连杆接合元件104可以包括位于两个连接表面1041之间的凹陷部1043,使得支撑板105能够从连杆接合元件104的两个连接表面1041之间延伸通过。连杆接合元件104还可以包括用于接合连杆的部件1044。用于接合连杆的部件1044可以位于连接表面1041和凹陷部1043的下方。用于接合连杆的部件1044可以是本技术领域中任何适当的部件。在图4b所示的实施例中,用于接合连杆的部件1044可以包括用于容纳连杆3的凸起部4的切口1045。当连杆3的凸起部4被容纳在切口1045中时,连杆接合元件104可以带动连杆3随其一起移动。
50.在根据本公开的一个实施例中,螺杆102的两端可以由螺杆支撑元件可旋转地支撑。如图1a所示,螺杆支撑元件可以包括两个螺杆支撑板106。每个螺杆支撑板106均包括用于可旋转地支撑螺杆102的相应端部的支撑孔。每个螺杆支撑板106均可以固定在支撑板105上。为了使得可移动元件103能够更稳定地沿着螺杆102轴向移动,传动机构10还可以包括用于引导可移动元件103的引导元件。如图1a所示,引导元件可以包括两个引导杆107。每个引导杆107的两端可以分别固定在所述两个支撑板106上,使得每个引导杆107基本平行于螺杆102延伸。每个引导杆107分别在可移动元件103的一端支撑并引导可移动元件103。
51.为了通过减小传动机构10的因制造公差而导致的组装公差而提高传动机构10的调节精度,在根据本公开的一个实施例中,如图1a、图2和图6所示,提供了限制元件108。限制元件108被构造用于在组装传动机构10期间消除传动机构10的组装公差并将螺杆102和可移动元件103(以及因此连杆接合元件104)同时精确地限制在零点位置。
52.参照图6,限制元件108可以大体构造成圆筒形。为了将可移动元件103限制在零点位置,限制元件108的端面1081上可以设置用于可移动元件103的限制部1082。限制部1082可以构造为从端面1081的一部分沿着轴向方向延伸的凸出部。限制部1082或凸出部可以包括限制表面1083。如图6所示,限制表面1083从端面1081沿着轴向方向延伸。也就是说,限制表面1083垂直于端面1081。相应地,如图3所示,在可移动元件103上可以设置有用于与限制元件108的限制表面1083相配合的抵接表面1035。当限制元件108的限制表面1083与可移动元件103的抵接表面1035彼此抵接时,可移动元件103可以被定位在零点位置。
53.为了将螺杆102限制在零点位置,限制元件108的内表面被构造成多边形结构(比如,六边形、七边形、八边形、十边形等)。相应地,在螺杆102的一端(靠近马达101的那一端)设置有与限制元件108的内表面相配合的多边形部分1021。螺杆102的多边形部分1021的外表面被构造成与限制元件108的内表面的多边形结构匹配的多边形结构。当螺杆102处于零点位置时,限制元件108的多边形内表面可以与螺杆102的多边形部分1021的多边形外表面彼此配合,以防止螺杆102相对于限制元件108旋转而偏离零点位置。
54.在根据本公开的一个实施例中,螺杆102还可以包括抵接元件1022。抵接元件1022可以呈弹性指状件的形式。呈弹性指状件形式的抵接元件1022可以径向向外偏转而处于偏转构造,并且可以径向向内复原而返回初始构造。当抵接元件1022处于偏转构造时,限制元件108可以被接收在抵接元件1022的内部空间中,以不妨碍螺杆102的旋转。当抵接元件
1022处于初始构造时,抵接元件1022可以抵接限制元件108的端面,以阻止限制元件108沿着朝向马达101的方向轴向移动。
55.接下来,将详细描述在组装过程中利用限制元件108消除由制造公差导致的组装公差并将螺杆102、可移动元件103和连杆接合元件104精确地定位在零点位置的具体过程。
56.在组装传动机构10时,可以首先使螺杆102延伸通过限制元件108以及可移动元件103的螺纹孔1031,将限制元件108接收在螺杆102的抵接元件1022的内部空间中并将可移动元件103旋转到螺杆102的初始零点位置;然后,考虑传动机构10的组装公差并通过顺时针或逆时针旋转螺杆102而补偿该组装公差,从而将可移动元件103调节到螺杆102的补偿了组装公差的实际零点位置;在确定了可移动元件103在螺杆102上的实际零点位置之后,可以将限制元件108安装在螺杆102的多边形部分1021上、使限制元件108的限制表面1083与可移动元件103的抵接表面1035彼此抵接、并使螺杆102的抵接元件1022抵接在限制元件108的端面上,这样,限制元件108可以将可移动元件103和螺杆102均定位在补偿了组装公差的实际零点位置;之后,可以将可移动元件103和连杆接合元件104彼此固定而完成传动机构10的组装。
57.借助于限制元件108,根据本公开的传动机构10能够在组装过程中补偿传动机构10的组装公差而将传动机构10的各部件精确地定位在实际零点位置,从而提高了传动机构10的调节精度。为了更精确地将螺杆102定位在实际零点位置,可以增加限制元件108的内表面的多边形构造的边数。边数越多,越有利于限制元件108的精确定位。在根据本公开的一个实施例中,将限制元件108的内表面构造成十边形是有利的,其能够在很好地满足传动机构10的调节精度需求的同时牢固地定位螺杆102。
58.图7至图10示出了根据本公开的另一个实施例的传动机构20。传动机构20具有与传动机构10类似的构造。传动机构20可以包括马达201、由马达201驱动的螺杆202、可移动地安装在螺杆202上的可移动元件203、和连杆接合元件204。可移动元件203构造成在螺杆202旋转时沿着螺杆202的轴向方向移动。连杆接合元件204可以与可移动元件203固定连接并因此能够与可移动元件203一起轴向移动。连杆接合元件204还可以与用于驱动移相器的调节元件的连杆接合,从而通过驱动连杆来调节移相器的倾角。
59.在下文的描述中,简洁起见,相同的部件将不再详细描述,而仅描述传动机构20与传动机构10不同的构造。
60.与传动机构10不同,传动机构20可以不包括限制元件108,并且传动机构20的螺杆可以不包括多边形部分1021。在该实施例中,传动机构20的可移动元件203和连杆接合元件204构造成能够沿着轴向方向错位配合,以弥补传动机构20的组装公差。特别地,可移动元件203的两个连接凸缘2032和连杆接合元件204的两个连接表面2041构造成能够错位地固定在一起,以实现可移动元件203和连杆接合元件204的错位配合。
61.在根据本公开的一个实施例中,在传动机构20的可移动元件203的两个连接凸缘2032上均设置有沿着螺杆202的轴向方向分布的多个齿2034。每个齿2034沿着与螺杆202的轴向方向垂直的纵向方向延伸。相邻的两个齿2034之间形成沿着所述纵向方向延伸的狭槽。在每个连接凸缘2032上还设置有适于容纳紧固元件的一个或多个孔2033。紧固元件(比如,螺栓或螺钉)可以延伸穿过孔2033而将可移动元件203和连杆接合元件204彼此固定。
62.相对应地,连杆接合元件204的两个连接表面2041上也均设置有沿着螺杆202的轴
向方向分布的多个齿2043。每个齿2043沿着与螺杆202的轴向方向垂直的纵向方向延伸。相邻的两个齿2043之间形成沿着所述纵向方向延伸的狭槽。在每个连接表面2041上还设置有适于容纳紧固元件的一个或多个孔2042。孔2042可以构造成与可移动元件203的相应的连接凸缘2032上的孔2033相对应,这样,紧固元件(比如,螺栓或螺钉)可以延伸穿过可移动元件203的孔2033和连杆接合元件204的孔2042而将可移动元件203和连杆接合元件204彼此固定。
63.在进行组装时,可移动元件203的齿2034可以容纳在连杆接合元件204的相应狭槽中,并且连杆接合元件204的齿2043可以容纳在可移动元件203的狭槽中(如图10所示)。为了补偿传动机构20的组装公差,可以将可移动元件203的多个齿和连杆接合元件204的相应狭槽沿着轴向方向错位地配合在一起,以便将连杆接合元件204精确地定位在零点位置。可以通过控制可移动元件203的齿2034以及相邻齿2034之间的狭槽的大小、和/或连杆接合元件204的齿2043以及相邻齿2043之间的狭槽的大小来控制传动机构20的调节精度。另外,可移动元件203和连杆接合元件204之间的齿-狭槽配合还能够在将可移动元件203和连杆接合元件204被紧固在一起后防止可移动元件203相对于连杆接合元件204轴向移动,从而确保传动机构20的传动精度。
64.在一些情况下,由于温度变化等因素引起的塑性变形,可移动元件203和连杆接合元件204之间的齿-狭槽配合可能失效,使得可移动元件203和连杆接合元件204可能相对于彼此滑动。为了防止该问题,设置在连杆接合元件204上的最外侧的两个齿2044可以具有显著大于其它齿2043的轴向尺寸(如图10所示)。这样,可以借助于连杆接合元件204上的最外侧的两个齿2044来有效地防止可移动元件203相对于连杆接合元件204的滑动。为了适应连杆接合元件204的最外侧的两个齿2044,设置在可移动元件203上的多个齿2034的轴向分布宽度可以小于设置在连杆接合元件204上的多个齿2043的轴向分布宽度。
65.为了便于在可移动元件203和连杆接合元件204错位配合的情况下紧固可移动元件203和连杆接合元件204,可移动元件203的孔2033和/或连杆接合元件204的孔2042可以具有沿着轴向方向延伸的长形形状,比如椭圆形形状或长方形形状等。这样,即便在可移动元件203和连杆接合元件204错位配合的情况下,紧固元件也能够同时延伸通过可移动元件203的孔2033和连杆接合元件204的孔2042而将可移动元件203和连杆接合元件204紧固在一起。
66.在根据本公开的又一个实施例中,传动机构可以同时包括传动机构10的限制元件108和螺杆102、以及传动机构20的可移动元件203和连杆接合元件204。这样,传动机构能够更好地补偿该传动机构的组装公差而提高其调节精度。
67.上文参照附图描述了根据本公开的示例性实施例。但是,本领域技术人员应当理解,在不脱离本公开的精神和范围的情况下,能够对本公开的示例性实施例进行多种变化和改变。所有变化和改变均包含在权利要求所限定的本公开的保护范围内。本公开由所附权利要求限定,并且这些权利要求的等同物也包含在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。