1.本技术涉及医疗锚钉技术领域,尤其涉及一种免打结锚钉及其植入装置。
背景技术:
2.免打结锚钉作为现代运动医学中的一个大类,有着广泛的应用。免打结锚钉通常用于软组织在骨性结构撕脱或撕裂的修复手术中,是一种软组织修复或重建的外科植入结构。
3.在临床上,经常使用的免打结锚钉主要包括锚钉本体和位于锚钉本体顶端的穿线部。锚钉本体的外周壁上设置有外螺纹,穿线部上贯穿设置有穿线孔。位于顶端的穿线部使缝线一端先于锚钉本体打入至骨道内,通过锚钉本体的外螺纹与骨骼螺纹连接,以将锚钉本体固定于人体骨骼上,并对缝线的另一端进行固定。
4.然而,当锚钉本体的外螺纹边缘较为锋利时,存在外螺纹直接割断缝线的情况;而当螺纹边缘不够锋利时,锚钉本体在人休骨骼上的固定效果又大大降低。
技术实现要素:
5.为了改善锚钉本体外螺纹的锋利度会影响锚钉本体和缝线在人体骨骼上的固定的问题,本技术提供了一种免打结锚钉及其植入装置。
6.第一方面,本技术提供的一种免打结锚钉采用如下的技术方案:一种免打结锚钉,包括固定装置、穿线装置和锚钉装置;所述固定装置包括固定丝杆,所述固定丝杆上设置有用于旋动固定丝杆的第一旋动槽;所述穿线装置包括穿线本体和设置于穿线本体上的多个滑动块;所述穿线本体上设置有多条用于缝线抵入的埋线通道,所述穿线本体上还设置有用于控制穿线本体旋动的第二旋动槽,所述第二旋动槽内底壁且于所有埋线通道的交汇处贯穿设置有用于供固定丝杆螺纹穿设的连接通道;所述锚钉装置包括锚钉本体和设置于锚钉本体上的螺纹部;所述锚钉本体上设置有用于供穿线装置和固定装置抵入的插接槽,所述插接槽的侧壁内设置有用于将滑动块定位于锚钉本体上的滑动通道,所述插接槽的侧壁内还设置有用于控制锚钉本体旋动的第三旋动槽。
7.通过采用上述技术方案,锚钉本体通过螺纹部在人体骨骼上的螺纹配合,稳定固定于人体骨骼上,保障了锚钉本体在人体骨骼上的安装稳定性及应用稳定性;缝线通过埋线通道定位于穿线本体上,穿线本体进入插接槽后通过滑动通道位移、定位,使缝线安装于插接槽内以使用,减少了螺纹部与缝线相互干扰的现象;此外,固定丝杆通过连接通道固定于穿线本体上,通过固定丝杆对缝线的抵压,提高了缝线在锚钉本体上的位置稳定性,有助于提高缝线的应用稳定性;此过程在保障锚钉本体稳定安装的同时,减少了螺纹部与缝线的相互干扰,亦提高了缝线的位置稳定性及应用稳定性。
8.在一个具体的可实施方案中,所述固定装置、穿线装置和锚钉装置由镁金属或钛金属或不锈钢制得。
9.通过采用上述技术方案,镁金属、钛金属和不锈钢均存在质轻、强度高且不易形变受损的优势,作为医疗锚钉的材料既便于安装,又有助于减少病患植入锚钉后的痛苦。
10.在一个具体的可实施方案中,所述插接槽的侧壁内且位于插接槽远离第三旋动槽的一端设置有定向通道,所述穿线本体远离第二旋动槽的一端设置有适配于定向通道的导向面。
11.通过采用上述技术方案,穿线本体通过导向面抵入定向通道内腔,增加了穿线本体与插接槽内侧壁的接触面积,提高了穿线本体在插接槽内的位置稳定性,保障了穿线本体将缝线抵接于定向通道内的稳定性。
12.在一个具体的可实施方案中,所述滑动通道包括第一通道、第二通道和第三通道;所述第一通道沿插接槽的延伸方向设置,所述第二通道设置于第一通道远离第三旋动槽的一端,所述第三通道设置于第二通道远离第一通道的一端。
13.通过采用上述技术方案,滑动块通过第一通道进入插接槽内腔,穿线本体在插接槽内转动时,滑动块可依次抵入第二通道、第三通道,并最终卡接于第三通道内,使得穿线本体定位于插接槽内,以使缝线在锚钉本体上初步定位。
14.在一个具体的可实施方案中,所述滑动通道包括第四通道、第五通道和第六通道;所述第四通道沿插接槽的延伸方向设置,所述第五通道设置于第四通道远离第三旋动槽的一端,且所述第五通道贯穿于锚钉本体;所述第六通道设置于第五通道远离第四通道的一端,且所述第六通道贯穿于锚钉本体。
15.通过采用上述技术方案,滑动块通过第四通道进入插接槽内腔,穿线本体在插接槽内转动时,滑动块可依次抵入第五通道、第六通道,并最终卡接于第六通道内;贯穿锚钉本体设置的第五通道和第六通道,增大了滑动块与锚钉本体的接触面积,使得穿线本体在插接槽内的位置稳定性有所提高,进而提高了缝线在锚钉本体上的位置稳定性及应用稳定性。
16.第二方面,本技术提供的一种植入装置采用如下的技术方案:一种植入装置,所述植入装置用于植入免打结锚钉,所述植入装置包括锚钉植入机构、穿线植入机构和丝杆植入机构;所述锚钉植入机构用于旋动锚钉本体,将所述锚钉本体安装于人体骨骼上;所述穿线植入机构用于将穿线本体旋动安装于插接槽内;所述丝杆植入机构用于将固定丝杆固定于穿线本体上。
17.通过采用上述技术方案,锚钉植入机构通过第三旋动槽以旋动锚钉本体,进而将锚钉本体安装于人体骨骼上;穿线植入机构通过第二旋动槽旋动穿线本体,使滑动块依次抵入第二通道和第三通道内,进而使穿线本体定位于插接槽内;丝杆植入机构通过第一旋动槽旋动固定丝杆,使固定丝杆螺纹穿设于连接通道,以将缝线定位于锚钉本体上。
18.在一个具体的可实施方案中,所述锚钉植入机构包括操作部和抵接部;所述操作部包括握持手柄,所述抵接部包括连接杆和连接端头;所述连接杆设置于握持手柄上,所述连接端头设置于连接杆远离握持手柄的一端;所述连接端头适配于第三旋动槽,以用于旋动所述锚钉本体。
19.通过采用上述技术方案,连接端头抵入适配的第三旋动槽内腔后,操作人员通过
握持手柄的转动,可控制锚钉本体螺纹连接于人体骨骼上,提高了操作人员在人体骨骼上植入锚钉本体的便捷性。
20.在一个具体的可实施方案中,所述穿线植入机构包括第一定位板、第一旋动杆、第一外接板和第一外接端头;所述第一旋动杆设置于第一定位板上,所述第一外接板设置于第一旋动杆上,所述第一外接端头设置于第一旋动杆远离第一定位板的一端;所述第一外接端头适配于第二旋动槽,以用于旋动所述穿线本体。
21.通过采用上述技术方案,第一外接端头抵入适配的第二旋动槽内腔后,操作人员通过转动第一定位板,可控制穿线本体在插接槽内转动,进而便于滑动块从第一通槽依次滑入第二通槽和第三通槽内,直至滑动块最终定位于第三通槽内腔;此过程提高了操作人员在插接槽内安装穿线本体的便捷度。
22.在一个具体的可实施方案中,所述丝杆植入结构包括第二定位板、第二旋动杆、第二外接板和第二外接端头;所述第二旋动杆设置于第二定位板上,所述第二外接板设置于第二旋动杆上,所述第二外接端头设置于第二旋动杆远离第二定位板的一端;所述第二外接端头适配于第一旋动槽,以用于旋动所述固定丝杆。
23.通过采用上述技术方案,第二外接端头抵入适配的第一旋动槽内腔后,操作人员通过转动第二定位板,可控制固定丝杆螺纹穿设于连接通道,进而使得固定丝杆将缝线抵紧于定向通道的内底壁,提高了缝线在插接槽内的位置稳定性;此外,此过程亦提高了操作人员在插接槽内安装穿线本体的便捷度。
24.在一个具体的可实施方案中,所述握持手柄上贯穿设置有用于供第一定位板或第二定位板抵入的预设通道,所述预设通道的内底壁贯穿设置有用于使连接杆插接固定的安装通道;所述连接杆上贯穿设置有用于使第一旋动杆或第二旋动杆抵入的适配通道,所述第一外接板或第二外接板位于安装通道内,且所述第一外接板或第二外接板与连接杆相抵;所述连接端头上贯穿设置有与安装通道同轴的导向通道,所述导向通道用于供第一外接端头或第二外接端头穿过。
25.通过采用上述技术方案,操作人员可将丝杆植入机构或穿线植入机构安装于锚钉植入机构上以使用,使得操作人员仅仅通过转动握持手柄即可完成免打结锚钉各部件的植入安装,提高了操作便捷性。
26.综上所述,本技术具有以下有益技术效果:1.锚钉本体通过螺纹部在人体骨骼上的螺纹配合,稳定固定于人体骨骼上,保障了锚钉本体在人体骨骼上的安装稳定性及应用稳定性;缝线通过埋线通道定位于穿线本体上,穿线本体进入插接槽后通过滑动通道位移、定位,使缝线安装于插接槽内以使用,减少了螺纹部与缝线相互干扰的现象;此外,固定丝杆通过连接通道固定于穿线本体上,通过固定丝杆对缝线的抵压,提高了缝线在锚钉本体上的位置稳定性,有助于提高缝线的应用稳定性;此过程在保障锚钉本体稳定安装的同时,减少了螺纹部与缝线的相互干扰,亦提高了缝线的位置稳定性及应用稳定性;2.锚钉植入机构通过第三旋动槽以旋动锚钉本体,进而将锚钉本体安装于人体骨骼上;穿线植入机构通过第二旋动槽旋动穿线本体,使滑动块依次抵入第二通道和第三通道内,进而使穿线本体定位于插接槽内;丝杆植入机构通过第一旋动槽旋动固定丝杆,使固定丝杆螺纹穿设于连接通道,以将缝线定位于锚钉本体上。
附图说明
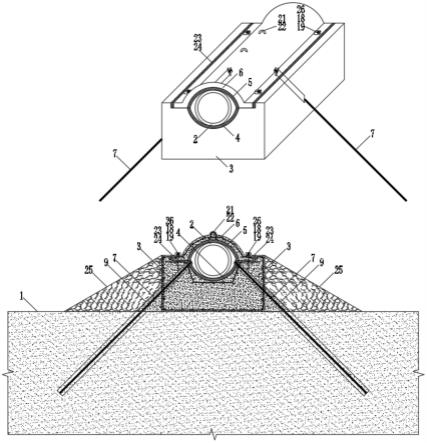
27.图1是本技术实施例1中一种免打结锚钉的结构示意图;图2是沿图1中a-a方向的剖面示意图;图3是本技术实施例1中用于体现锚钉本体结构的示意图;图4是本技术实施例1中用于体现穿线本体结构的示意图;图5是本技术实施例1中用于体现埋线通道和连接通道位置关系的示意图;图6是本技术实施例1中用于体现固定丝杆结构的示意图;图7是本技术实施例1中锚钉植入机构的结构示意图;图8是沿图7中b-b方向的剖面示意图;图9是本技术实施例1中用于体现连接端头、握持手柄和连接杆位置关系的示意图;图10是本技术实施例1中穿线植入机构的结构示意图;图11是本技术实施例1中丝杆植入机构的结构示意图;图12是本技术实施例2中一种免打结锚钉沿轴向的剖面结构示意图。
28.附图标记说明:1、固定装置;11、固定丝杆;111、第一旋动槽;2、穿线装置;21、穿线本体;211、导向面;212、埋线通道;213、第二旋动槽;214、连接通道;22、滑动块;3、锚钉装置;31、锚钉本体;311、插接槽;3111、定向通道;3112、第三旋动槽;32、螺纹部;4、滑动通道;41、第一通道;42、第二通道;43、第三通道;44、第四通道;45、第五通道;46、第六通道;5、锚钉植入机构;51、操作部;511、握持手柄;5111、安装通道;5112、预设通道;52、抵接部;521、连接杆;5211、适配通道;5221、导向通道;522、连接端头;6、穿线植入机构;61、第一定位板;62、第一旋动杆;63、第一外接板;64、第一外接端头;7、丝杆植入机构;71、第二定位板;72、第二旋动杆;73、第二外接板;74、第二外接端头。
具体实施方式
29.以下结合附图1-12对本技术作进一步详细说明。
30.本技术实施例公开了一种免打结锚钉。
31.实施例1参照图1,免打结锚钉包括固定装置1、穿线装置2和锚钉装置3。其中,固定装置1、穿线装置2和锚钉装置3可以由镁金属或钛金属或不锈钢制得,在本实施例中,固定装置1、穿线装置2和锚钉装置3均采用镁金属。其中,镁金属选取纯度大于99.9%的纯镁铸锭为原材料,纯镁铸锭在300-500℃下热挤压为直径10-12mm的棒材,之后,将热挤压形成的棒材在10-50℃下冷轧制,直至棒材直径为6-8mm,以备用。免打结锚钉使用时,锚钉装置3先安装于人体骨骼上,缝线定位于穿线装置2上以后,将穿线装置2安装于锚钉装置3上。之后,通过将
固定装置1再安装于穿线装置2上,以提高缝线在锚钉装置3上的位置稳定性。
32.参照图2,锚钉装置3包括锚钉本体31和螺纹部32,锚钉本体31为实心柱体,且实心柱体长度方向的一端为锥体结构。螺纹部32一体成型于锚钉本体31的外缘壁上,且螺纹部32沿锚钉本体31的长度方向延伸。
33.参照图2,锚钉本体31远离自身锥体结构的端壁设置有插接槽311,插接槽311沿锚钉本体31的长度方向延伸,且插接槽311的长度尺寸小于锚钉本体31的长度尺寸。在本实施例中,插接槽311用于安装穿线装置2和锚钉装置3。
34.参照图2,插接槽311的侧壁内且位于锚钉本体31靠近自身锥体结构的一端设置有定向通道3111。在本实施例中,定向通道3111竖直方向的截面呈梯形,且该梯形靠近插接槽311的侧边长度尺寸大于远离插接槽311的侧边长度尺寸。
35.参照图2,插接槽311的侧壁内还设置有第三旋动槽3112,第三旋动槽3112位于插接槽311远离定向通道3111的一端。
36.参照图3,在本实施例中,第三旋动槽3112为外切于插接槽311的正六边形槽体。第三旋动槽3112用于操作人员通过植入装置抵入,以控制锚钉本体31旋动,进而以便锚钉本体31通过螺纹部32固定于人体骨骼上。
37.参照图2,穿线装置2包括穿线本体21和多个滑动块22。在本实施例中,穿线本体21为圆柱体,穿线本体21的外径尺寸与插接槽311的内径尺寸相适配,以快速抵入插接槽311内腔。穿线本体21高度方向的一端设置有导向面211,导向面211适配于定向通道3111。当穿线本体21完全抵入插接槽311内腔后,穿线本体21的导向面211部分抵接于定向通道3111的侧壁内。
38.参照图4,滑动块22的数量可以为三个,三个滑动块22沿穿线本体21的外周等距分布。穿线本体21的外周壁上设置有多条埋线通道212。
39.参照图5,在本实施例中,相邻的两个滑动块22之间均设置有埋线通道212,所有埋线通道212长度方向的同一端延伸至穿线本体21其中的一个端壁面并交汇于一点。
40.参照图4,穿线本体21于埋线通道212未延伸的端壁处设置有第二旋动槽213,在本实施例中,第二旋动槽213为正六边形槽体。第二旋动槽213内底壁贯穿设置有连接通道214。
41.参照图5,连接通道214为内侧壁带有螺纹凹槽的通道,且连接通道214的中心轴线位于所有埋线通道212的交汇点上。
42.参照图2,插接槽311的侧壁内还设置有多条滑动通道4,滑动通道4的数量等同于滑动块22的数量。在本实施例中,滑动通道4包括第一通道41,第二通道42和第三通道43。其中,第一通道41沿第三旋动槽3112和插接槽311的延伸方向延伸,且第一通道41先穿过第三旋动槽3112再进入插接槽311内。
43.参照图2,第二通道42位于第一通道41远离第三旋动槽3112的一端,第二通道42与第一通道41垂直,以形成l型。第三通道43位于第二通道42远离第一通道41的一端,第三通道43朝向第三插接槽311延伸,且第三通道43平行于第一通道41。在本实施例中,进入第三通道43的滑动块22可卡接于第三通道43内,使穿线本体21初步定位于插接槽311内。
44.参照图2,固定装置1包括固定丝杆11,固定丝杆11适配于连接通道214。
45.参照图6,固定丝杆11长度方向一端的端壁上设置有第一旋动槽111,在本实施例
中,第一旋动槽111为正六边形槽体。
46.参照图5,当螺钉本体安装于人体骨骼上以后,操作人员将缝线抵入埋线通道212内。
47.参照图2,接着,将穿线本体21抵入插接槽311内,此时,滑动块22先抵入第一通道41内。随着穿线本体21在插接槽311内的深入,滑动块22抵接于第一通道41靠近第二通道42的一端。操作人员通过植入装置抵入第二旋动槽213内,以转动穿线本体21,可使滑动块22依次抵入第二通道42和第三通道43内腔,并最终停留于第三通道43内。
48.参照图2,此时,穿线本体21带有导向面211的部分定位于定向通道3111内。操作人员通过植入装置抵入第一旋动槽111,使固定丝杆11螺纹穿设于连接通道214,直至固定丝杆11的端壁将所有缝线抵紧于定向通道3111的内底壁,以保障缝线在锚钉本体31上的位置稳定性。
49.本技术实施例一种免打结锚钉的实施原理为:将锚钉本体31旋拧于人体骨骼上,以定位、备用。将缝线抵入对应埋线通道212内,再将穿线本体21抵入插接槽311内,使滑动块22抵入第一通道41内。当滑动块22位移至第一通道41靠近第二通道42的一端时,转动穿线本体21,使滑动块22依次抵入第二通道42、第三通道43,并最终定位于第三通道43内。此时,穿线本体21带有导向面211的部分位于定向通道3111内。
50.操作人员将固定丝杆11螺纹穿设于连接通道214,使固定丝杆11将缝线抵紧于定向通道3111内底壁,以保障缝线在锚钉本体31上的位置稳定性。
51.本技术实施例还公开了一种植入装置。参照图7,植入装置用于将免打结锚钉植入人体骨骼上,其中,植入装置包括锚钉植入机构5。
52.参照图2和图7,在使用时,锚钉植入机构5通过第三旋动槽3112以旋动锚钉本体31,进而将锚钉本体31安装于人体骨骼上。
53.参照图7,锚钉植入机构5包括操作部51和抵接部52,其中,操作部51包括握持手柄511,抵接部52包括连接杆521和连接端头522。
54.参照图8,握持手柄511上贯穿设置有安装通道5111,安装通道5111的内径尺寸与连接杆521的外径尺寸相适配,连接杆521一端抵入安装通道5111内腔后焊接固定。握持手柄511围绕安装通道5111的外周设置有预设通道5112,预设通道5112位于握持手柄511远离连接杆521的一端。
55.参照图2和图9,连接端头522一体成型于连接杆521远离握持手柄511的一端,且连接端头522的外周尺寸与第三旋动槽3112的内径尺寸相适配。操作人员将连接端头522抵入第三旋动槽3112内腔后,通过手持握持手柄511以转动,可控制锚钉本体31快速植入人体骨骼内。
56.参照图10,植入装置还包括穿线植入机构6。
57.参照图2和图10,穿线植入机构6通过第二旋动槽213旋动穿线本体21,使滑动块22依次抵入第二通道42和第三通道43内,进而使穿线本体21定位于插接槽311内。
58.参照图10,穿线植入机构6包括第一定位板61、第一旋动杆62、第一外接板63和第一外接端头64。第一旋动杆62焊接于第一定位板61上,第一外接板63穿设于第一旋动杆62并焊接于第一旋动杆62的外缘壁上。在本实施例中,第一外接板63位于第一旋动杆62靠近第一定位板61的一端。
59.参照图2和图10,第一外接端头64一体成型于第一旋动杆62远离第一定位板61的端壁,且第一外接端头64的外径尺寸与第二旋动槽213的内径尺寸相适配。操作人员可将第一外接端头64抵入第二旋动槽213内腔以转动,使穿线本体21在插接槽311内转动,进而使得滑动块22依次抵入第二通道42和第三通道43内。
60.参照图8和图10,此外,操作人员可将穿线植入机构6安装于锚钉植入机构5上以使用。连接杆521上贯穿设置有可使第一旋动杆62抵入的适配通道5211,连接端头522上贯穿设置有可使第一外接端头64穿过的导向通道5221,导向通道5221与适配通道5211同轴设置。
61.参照图8和图10,操作人员将第一外接端头64、第一旋动杆62和第一外接板63依次穿过预设通道5112,直至第一外接端头64穿过导向通道5221。此时,第一旋动杆62过盈配合于适配通道5211内,第一外接板63位于安装通道5111内,且第一外接板63与连接杆521相抵。第一定位板61定位于预设通道5112内。操作人员通过握持手柄511以操作,提高了穿线植入机构6的操作便捷性。当锚钉植入机构5需要使用,操作人员可拆卸穿线植入机构6以使用锚钉植入机构5。
62.参照图11,植入装置还包括丝杆植入机构7。
63.参照图2和图11,丝杆植入机构7通过第一旋动槽111旋动固定丝杆11,使固定丝杆11螺纹穿设于连接通道214,以将缝线定位于锚钉本体31上。
64.参照图11,丝杆植入结构包括第二定位板71、第二旋动杆72、第二外接板73和第二外接端头74。第二旋动杆72焊接于第二定位板71上,第二外接板73穿设于第二旋动杆72并焊接于第二旋动杆72的外缘壁上。在本实施例中,第二外接板73位于第二旋动杆72靠近第二定位板71的一端。
65.参照图2和图11,第二外接端头74一体成型于第二旋动杆72远离第二定位板71的端壁,且第二外接端头74的外径尺寸与第一旋动槽111的内径尺寸相适配。操作人员可将第二外接端头74抵入第一旋动槽111内腔以转动,使固定丝杆11快速穿设于连接通道214,进而通过固定丝杆11将缝线抵紧于定向通道3111内底壁。
66.参照图8和图11,此外,操作人员可将丝杆植入机构7安装于锚钉植入机构5上以使用。操作人员将第二外接端头74、第二旋动杆72和第二外接板73依次穿过预设通道5112,直至第二外接端头74穿过导向通道5221。此时,第二旋动杆72过盈配合于适配通道5211内,第二外接板73位于安装通道5111内,且第二外接板73与连接杆521相抵。第二定位板71定位于预设通道5112内。操作人员通过握持手柄511以操作植入装置,提高了植入机构的操作便捷性。当锚钉植入机构5需要使用,操作人员可拆卸丝杆植入机构7以使用锚钉植入机构5。
67.本技术实施例一种植入装置的实施原理为:操作人员将连接端头522抵入第三旋动槽3112内,通过转动握持手柄511,即可将锚钉本体31快速植入人体骨骼上。相应的,通过第一外接端头64抵入第二旋动槽213内,即可使穿线本体21在插接槽311内转动,进而使滑动块22依次抵入第二通道42、第三通道43,并最终定位于第三通道43内。通过第二外接端头74抵入第一旋动槽111内,即可使固定丝杆11快速穿设于连接通道214,进而使固定丝杆11将缝线抵紧于定向通道3111内底壁。
68.实施例2本技术实施例与实施例1的不同之处在于,参照图12,滑动通道4包括第四通道44、
第五通道45和第六通道46。其中,第四通道44沿插接槽311的延伸方向延伸,且第四通道44先穿过第三旋动槽3112再进入插接槽311内。
69.参照图12,第五通道45位于第四通道44远离第三旋动槽3112的一端,第五通道45与第四通道44垂直,以形成l型,且第五通道45贯穿于锚钉本体31。第六通道46位于第五通道45远离第四通道44的一端,第六通道46朝向第三插接槽311延伸,第六通道46平行于第四通道44,且第六通道46贯穿于锚钉本体31。
70.参照图2和图12,在本实施例中,进入第六通道46的滑动块22可卡接于第六通道46内,使穿线本体21初步定位于插接槽311内。
71.本技术实施例一种免打结锚钉的实施原理为:穿线本体21在插接槽311内转动后,使滑动块22依次抵入第二通道42、第三通道43,并最终定位于第三通道43内。贯穿设置的第二通道42和第三通道43便于滑动块22抵入并卡紧,提高了滑动块22在滑动通道4内的位置稳定性,进而有助于提高穿线本体21在锚钉本体31上的位置稳定性,提高了缝线在锚钉本体31内的位置稳定性。
72.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。