1.本发明涉及具有视线检测功能的摄像设备、电子装置和取景器单元。
背景技术:
2.作为数码相机的显示装置,已知电子取景器(evf)。用户将自身的眼睛移近evf以观看显示图像。
3.另外,通过检测用户的视线方向来实现选择自动对焦点的功能的具有视线检测功能的相机和摄像机已经投入实际使用。
4.例如,特开平5-130463号公报讨论了使用公共光路作为电子取景器(evf)显示器的光路和视线输入传感器的光路两者并在公共光路上设置光路分割镜以检测观看evf显示器的眼睛的视线方向(位置)的技术。
5.现有技术文献
6.专利文献
7.专利文献1:特开平5-130463号公报
技术实现要素:
8.发明要解决的问题
9.然而,专利文献1没有讨论具有视线输入功能的摄像设备中的电子取景器(evf)的光学配置。例如,没有考虑用于防止取景器中的灰尘影响的适当结构以及摄像设备的操作构件和内置构件与取景器和视线检测机构的相对配置。
10.本发明的目的是一种包括evf和视线输入功能的摄像设备中的适当的evf配置,该evf配置防止摄像设备的可操作性降低。
11.用于解决问题的方案
12.根据本发明的一个方面,为了实现上述目的,包括显示单元(18)的显示单元(19)被固定到光路分割单元(16),光路分割单元(16)被构造为将光路分割到具有视线检测功能的电子取景器(evf)中的视线检测传感器。
13.发明的效果
14.本发明防止了包括电子取景器(evf)和视线输入功能的摄像设备的可操作性降低。
附图说明
15.图1a是说明性地示出作为根据本发明的第一示例性实施方式的电子装置的相机本体101的外观的图。
16.图1b是说明性地示出作为根据本发明的第一示例性实施方式的电子装置的相机本体101的外观的图。
17.图2是说明性地示出根据本发明的一个方面的相机本体101的内部构造的框图。
18.图3是示出根据本发明的第一示例性实施方式的相机本体101的截面图。
19.图4是示出根据本发明的第一示例性实施方式的电子取景器(evf)单元1的截面图。
20.图5是说明性地示出根据本发明的第一示例性实施方式的目镜窗32的图。
21.图6是示出根据本发明的一个方面的目镜窗32的截面图。
22.图7是示出根据本发明的一个方面的evf单元1的结构的图。
23.图8是示出根据本发明的一个方面的evf单元1的主要部分的截面图。
24.图9是示出根据本发明的第一示例性实施方式的evf单元1的在包括接近检测用的红外发光二极管(led)44的位置处的主要部分的截面(水平截面)图。
25.图10是示出根据本发明的第一示例性实施方式的evf单元1的在包括接近检测用的传感器45的位置处的主要部分的截面(水平截面)图。
26.图11是示出根据本发明的一个方面的evf单元1的在包括接近检测单元47的位置处的截面图。
27.图12是说明性地示出接近检测单元47的投受光特性(light transmission/reception characteristic)的曲线图。
28.图13是示出根据本发明的第一示例性实施方式的接近检测单元47的主要部分的截面(法线截面)图。
29.图14是说明性地主要示出与根据本发明的第一示例性实施方式的evf单元1中的视线检测功能有关的部分的立体图。
30.图15是主要示出与根据本发明的第一示例性实施方式的evf单元1中的视线检测功能有关的部分的截面图。
31.图16是说明性地示出根据本发明的一个方面的evf单元1中的视线检测用的光路的图。
32.图17是说明性地示出用户的眼球和反射像的配置的图。
33.图18是示出视线检测方法的原理的图。
34.图19是说明性地示出视线检测传感器上的眼睛图像的图。
35.图20是示出根据本发明的第一示例性实施方式的视线检测操作的示意性流程图。
36.图21a是说明性地示出根据本发明的第一示例性实施方式的光路分割棱镜单元16的结构的图。
37.图21b是说明性地示出根据本发明的第一示例性实施方式的光路分割棱镜单元16的结构的图。
38.图22是示出根据本发明的第二示例性实施方式的光路分割棱镜单元216和显示面板218的分解立体图。
39.图23是示出根据本发明的第三示例性实施方式的光路分割棱镜315以及显示用的半导体芯片318a的分解立体图。
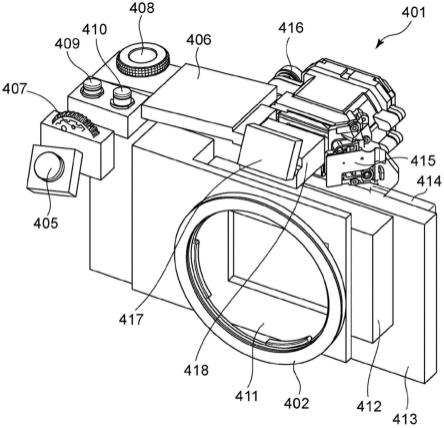
40.图24是示出作为根据本发明的第四示例性实施方式的电子装置的相机本体400的外观立体图。
41.图25是说明性地示出根据本发明的第四示例性实施方式的相机本体400的内部结构的立体图。
42.图26是说明性地示出根据本发明的第四示例性实施方式的相机本体400的内部结构的俯视外观图。
具体实施方式
43.(第一示例性实施方式)
44.下面将参照附图说明本发明的各种示例性实施方式。
45.《摄像设备100的基本结构》
46.图1是说明性地示出作为根据本发明的第一示例性实施方式的电子装置的相机本体101的外观的图。根据本示例性实施方式,相机本体101和后述的镜头单元102将被统称为摄像设备100。另外,根据本发明的一个方面的电子装置适用于能够检测诸如图像和字符等装置显示信息以及用户观看该装置上显示的信息的视线的任何电子装置。电子装置的示例可以包括移动电话、游戏机、平板终端、个人计算机、手表或眼镜式信息终端以及头戴式显示器。
47.图1a是正面立体图,图1b是背面立体图。相机本体101包括布置在其上的释放按钮103。释放按钮103是用于接收来自用户(图像拍摄者)的摄像操作的操作构件。如图1b所示,目镜部107布置在相机本体101的背面,用户可以通过目镜部107注视相机本体101中包括的电子取景器(evf)单元1。目镜部107形成视孔(eyehole)并且从相机本体101向外(背面侧)突出。操作构件106也布置在相机本体101的背面。操作构件106接收来自用户的各种操作。例如,第一操作构件106a是可以向各个方向按压的操作杆。第二操作构件106b是能够在四个方向上按压的四向键。显示监视器104(触摸面板)包括诸如液晶面板等显示面板,并且具有在显示面板上显示图像的功能。
48.图2是说明性地示出根据本发明的一个方面的相机本体101的内部构造的框图。图像传感器105是诸如电荷耦合器件(ccd)传感器或互补金属氧化物半导体(cmos)传感器的图像传感器。通过镜头单元102的光学系统形成在图像传感器105的像平面上的光学像由图像传感器105光电转换以获得模拟图像信号,获得的模拟图像信号输出到模/数(a/d)转换单元,并且从ad转换单元输出图像数据。
49.镜头单元102由包括变焦透镜(未示出)、聚焦透镜(未示出)和光圈(未示出)的光学系统构成。镜头单元102安装在相机本体101上,将来自被摄体的光束引导至图像传感器105,并在图像传感器105的像平面上形成被摄体像。光圈控制单元118、焦点调节单元119、变焦控制单元120均经由设置在安装部108上的安装接触部108b从中央处理单元(cpu)111接收指令信号,并且基于指令信号控制光圈、聚焦透镜和变焦透镜的驱动。
50.作为相机本体101的控制单元的cpu 111从存储器单元112的只读存储器(rom)读取用于相机本体101中包括的块的控制程序,将读取的程序展开到存储器单元112的随机存取存储器(ram),并且执行展开的程序。通过这样做,cpu 111控制相机本体101的块的操作并综合控制相机本体101和镜头单元102。视线检测单元4、测光单元113、自动焦点检测单元114、信号输入单元115、evf驱动单元2和光源驱动单元3连接到cpu 111。另外,cpu 111经由安装接触部108b将信号发送到布置在镜头单元102中的焦点调节单元119和光圈控制单元118。根据本示例性实施方式,存储器单元112具有存储来自图像传感器105和视线检测传感器53的摄像信号的功能。
51.在眼球像形成在后述的视线检测传感器53(ccd-eye)上的情况下,视线检测单元4对来自视线检测传感器53的输出(通过对眼睛摄像获得的眼睛图像)进行a/d转换并且获取a/d转换的结果。cpu 111根据后述的预定算法从眼睛图像提取视线检测所需的特征点,并根据特征点的位置计算用户的视线(用于观看的图像上的注视点)。
52.测光单元113对从兼用作测光传感器的图像传感器105获取的信号、具体而言与被摄界(field)的亮度对应的辉度信号进行放大、对数压缩、a/d转换,并且获取作为被摄界辉度信息的结果。
53.自动焦点检测单元114对包括在图像传感器105的像素中并且用于相位差检测的来自多个检测元件(多个像素)的信号电压进行a/d转换。然后,cpu 111基于多个检测元件的转换信号计算与焦点检测点对应的被摄体的距离。这是被称为像面相位差自动对焦(像面相位差af)的公知技术。根据本示例性实施方式,例如,取景器中的视野像(用于观看的图像)被分割,并且像平面上的180个分割部均包括焦点检测点。
54.图像处理单元116对存储在ram中的图像数据进行各种类型的图像处理。具体而言,图像处理单元116应用各种类型的图像处理,用以展开数字图像数据并且显示和记录展开的数字图像数据。各种类型的图像处理的示例包括用于校正源自光学系统或图像传感器的像素缺陷的校正处理、去马赛克处理、白平衡校正处理、颜色插值处理和伽马处理。
55.开关sw1和sw2连接到信号输入单元115。开关sw1通过释放按钮103的第一次敲击接通,开关sw2通过释放按钮103的第二次敲击接通。利用开关sw1发出开始相机本体101的测光、测距或视线检测操作的指令,并且利用开关sw2发出开始摄像操作的指令。来自开关sw1和sw2的on信号被输入信号输入单元115并且被传送到cpu 111。信号输入单元115还接收来自图1b所示的操作构件106a和106b以及显示监视器104的操作输入。
56.记录/输出单元117将包括图像数据的数据记录在诸如可移除存储卡等记录介质中,或者这种数据经由外部接口输出到外部装置。上面已经说明了包括相机本体101和镜头单元102的摄像设备100的基本结构。
57.《evf单元1的结构》
58.图3是示出根据本发明的第一示例性实施方式的相机本体101的截面图,并且是沿着由图1a所示的y轴和z轴形成的yz平面切取的截面图。
59.如图3中所示,快门109是焦平面机械快门,并且快门109和图像传感器105从布置有镜头单元102的一侧开始依次配置。在图3所示的截面图中,主基板(未示出)设置在图像传感器105和显示监视器104之间。镜头单元102经由安装108a可附接到相机本体101并且可从相机本体101拆卸。在图3所示的状态下,镜头单元102安装于相机本体101。
60.evf 1是设置在相机本体101的上部的显示单元并且具有后述的视线检测功能。相机本体101的上部是evf单元1在外盖110内部设置所在的那侧,而相机本体101的下部是设置有显示监视器104和图像传感器105而非evf单元1的那侧。
61.作为与显示监视器104类似的典型的evf,evf单元(取景器单元)1可以显示菜单和图像,另外,具有检测注视evf的用户视线的视线检测功能。另外,evf单元1被构造为将视线检测结果反映在相机本体101的控制中。视线检测功能的细节将被后述。
62.用户可以通过目镜部107注视evf单元1,目镜部107包括附接到眼罩附接框8的可移除的眼罩9。
63.现在将参照图4说明evf单元1的详细结构。图4是示出根据本发明的第一示例性实施方式的evf单元1的截面图,并且示出了相对于evf单元1的光轴(即,evf透镜单元29的摄像光轴)的纵截面。图4所示的evf透镜单元29的位置表示屈光度为-1的情况。
64.光路分割棱镜单元16利用光路分割棱镜单元16和固定镜筒12之间的棱镜遮罩13粘接固定到固定镜筒12。
65.光路分割棱镜单元16是包括粘接在一起的第一光路分割棱镜14和第二光路分割棱镜15的光路分割单元。
66.面板保持件17是用于保持显示面板的保持机构。显示面板18和面板保持件17粘接在一起并且固定以形成evf单元1的显示面板单元19。
67.显示面板单元19和光路分割棱镜单元16利用两者之间的面板遮罩20固定。面板遮罩20是遮罩单元。
68.evf单元1的evf透镜单元(目镜光学系统)29包括g1透镜21、g2透镜25和取景器透镜(g3透镜)26。g1透镜21由g1透镜保持件22保持。另外,g1-g2遮罩23也由g1透镜保持件22保持。g2-g3保持件24保持g2透镜25和作为取景器透镜26的g3透镜。g1透镜保持件22利用螺钉(未示出)固定到g2-g3保持件24。g3遮罩27用双面遮罩胶带28固定到g2-g3保持件24。前述构件21至28将被统称为evf透镜单元29。
69.在evf单元1的目镜部107中,设置有发光二极管(led)保持件30、目镜窗保持件31和目镜窗32。接着,将参照图5说明目镜窗32的结构的细节。图5是说明性地示出根据本发明的第一示例性实施方式的目镜窗32并且示出从evf透镜单元29侧(相机内侧)观察的目镜窗32的图。
70.目镜窗32是具有r1和r2面的光学构件。r1面位于面向相机内侧的那侧,r2面位于相反侧(相机外侧)。目镜窗32的基材是透明平板玻璃。透明区域32a是空白区域,并且示出为交叉影线区域的可见光截止遮罩32b包围透明区域。具体而言,透明区域32a位于与evf单元1的摄像光路对应的部分,并且可见光截止遮罩32b布置在避开摄像光路的区域。
71.可见光截止遮罩32b是用吸收可见光并透射红外光的材料(墨)印刷而成的印刷物。可见光截止遮罩32b的外观颜色在可见波长光下为黑色。可见光截止遮罩32b可以被构造为具有比红外波长光透射率低的可见波长光透射率。
72.图6是示出沿着图5所示的截面a-a的根据本发明的一个方面的目镜窗32的截面图。如上所述,平板玻璃32c是目镜窗32的基材。防反射涂层32d是布置在目镜窗32的面向相机内侧的那侧上的涂层。防反射涂层32d防止不必要的光的反射。另外,防反射(ar)膜32e隔着平板玻璃32c设置在防反射涂层32d的相对侧。ar膜32e具有硬涂层、防反射涂层和防飞散的功能。利用位于目镜窗32的面向相机外侧的那侧上的具有防飞散功能的ar膜32e,在目镜窗32损坏的情况下提高了安全性。
73.如上所述,用户可以通过光路分割棱镜单元16、evf透镜单元29和目镜窗32的透明区域32a观察显示面板单元19上显示的显示图像。
74.接着,图7是示出在去除了目镜窗32的情况下从目镜部107侧观察的evf单元1的结构的图。具体而言,图7是示出在从背面观察相机本体101的情况下的evf单元1的细节的图。
75.如图7所示,显示开口遮罩31a设置在目镜窗保持件31的中央。显示开口遮罩31a对应于evf的纵横比横向长,并且具有与目镜窗32的透明区域32a大致相同的形状。
76.屈光度调节拨盘33通过轴螺钉34可旋转地保持在evf单元1的侧面(右侧面)。屈光度调节拨盘是当用户注视evf单元1时使evf透镜单元29的透镜组在平行于光轴的方向上移动以调节屈光度的屈光度调节单元。在平行于图1a所示的x轴方向的方向上,相机本体101的右侧是释放按钮103、第一操作构件106a和第二操作构件106b所在的那侧。
77.固定螺钉35将目镜窗保持件31和led保持件30一起固定到固定镜筒12。
78.视线用红外led 36、37、38、39是主要用于近距离照明的视线用照明单元,并且分别布置在目镜窗保持件31的led用开口遮罩31b、31c、31d、31e中。
79.视线用红外led 40、41、42、43是主要用于远距离照明的视线用照明单元,并且分别布置在目镜窗保持件31的led用开口遮罩31f、31g、31h、31i中。前述八个视线用红外led被布置成使得照明光束通过led用开口遮罩变窄,以朝向不同位置(发射方向)发射红外光。
80.接近检测用红外led 44是与接近检测用传感器45一起检测物体(主要是用户)对evf单元1的靠近的接近检测单元的照明单元,这将在下面说明。接近检测用红外led 44布置在led用开口遮罩31j中。
81.接近检测用传感器45是接收从接近检测用红外led沿预定发射方向发射并经由物体反射的光束的检测单元。接近检测用传感器45布置在传感用开口遮罩31k中。
82.如图7所示,4个视线用红外led布置在沿着显示开口遮罩31a的上长边的位置处,并且另外4个视线用红外led(总共8个视线用红外led)布置在沿着显示开口遮罩31a的下长边的位置处。接近检测用红外led、接近检测用传感器和屈光度调节机构布置在沿着显示开口遮罩31a的短边的位置处。利用这种结构,在包括视线检测功能和屈光度调节功能的同时,可以减小evf单元1在二维投影平面上的尺寸。
83.另外,如图7所示,8个视线用红外led 36至39、接近检测用红外led 44和接近检测用传感器45相对于evf单元1的光轴布置在显示开口遮罩31a的外侧。因此,在从相机本体101的背面观察evf单元1的情况下,照明单元和检测单元布置在目镜窗32的可见截止遮罩32b所在的区域(在二维投影平面上重叠),使得用户不容易看到照明单元和检测单元。利用这种结构,照明单元和检测单元从外部不可见。图8是示出evf单元1的主要部分的截面图,并且示出在平行于evf单元1的光轴的方向上的包括主要用于近距离照明的视线用红外led 39的位置处的纵截面图。图8所示的状态表示作为evf透镜单元29的位置的evf单元1的屈光度为 2.0的情况。
84.如图8所示,用于近距离照明的视线用红外led 39通过附接到led保持件30上的缓冲构件46被压靠在目镜窗保持件31上并且被固定到led用开口遮罩31e上。
85.遮光壁31m是防止从用于近距离照明的视线用红外led 39发射的红外光直接进入取景器透镜26的遮光构件。
86.取景器透镜26包括r2面26a。r2面26a是凸透镜,并且取景器透镜26与目镜窗32之间的间隔在从透镜中心朝向周边的远距离处增大。由于遮光壁31m布置在增大的区域中,所以来自用于近距离照明的视线用红外led 39的照明光例如甚至可以对距目镜窗32近距离的区域进行照明。
87.另外,由于目镜窗32包括作为单一连续构件的可见截止遮罩32b和透明区域32a,因此不需要用于将可见截止遮罩32b和透明区域32a连接到一起的单独连接部。因此,不会在连接部中产生光束的渐晕,提高了evf单元1对附近区域的配光特性。
88.虽然上面主要说明了视线用红外led 39,但视线用红外led 36、37和38与视线用红外led 40、41、42和43具有类似的结构并产生上述优点。
89.接着,将说明接近检测用红外led 44和接近检测用传感器45的相对配置的细节。根据本示例性实施方式,接近检测用红外led 44和接近检测用传感器45被封装在作为接近检测单元47的单个单元中。
90.图9是示出根据本发明的第一示例性实施方式的在包括接近检测用红外led 44的位置处的evf单元1的主要部分的截面(水平截面)图。图10是示出根据本发明的第一示例性实施方式的在包括接近检测用传感器45的位置处的evf单元1的主要部分的截面(水平截面)图。
91.确定evf单元1中作为接近检测单元47的接近检测用红外led 44和接近检测用传感器45的位置。具体而言,接近检测单元47经由第二缓冲构件48被压靠目镜窗保持件31以确定接近检测单元47在evf单元1中的位置。如图9所示,接近检测单元47布置为使得接近检测用红外led 44的照射面相对于与evf单元1的光轴平行的线以10度角倾斜。类似地,
92.接近检测用传感器45的传感器面面向相对于与evf单元1的光轴平行的线以10度角倾斜的方向。
93.图11是包括接近检测单元47的位置的截面图,并且是包括接近检测用红外led 44和接近检测用传感器45并且在与evf单元1的光轴平行的方向上的截面图。图12是说明性地示出接近检测单元47的投受光特性的曲线图。在图12中,横轴代表与接近检测单元47的法线方向的角度,纵轴代表使用法线方向作为基准的投受光特性的强度。
94.现在将参照图9至图12说明作为接近检测单元47中的检测误差原因的串扰。在图9中,在眼罩附接框8和可移除的眼罩9的内壁部中,利用从接近检测用红外led 44发射的红外光对图9所示的图示为交叉影线部49的区域进行照明。此时,在接近检测用红外led 44以10度角倾斜(从16度至30度的区域)的情况下的交叉影线部49中的红外光强度的积分值与红外led 44不倾斜并且面向竖直方向(因为红外led 44不以10度角倾斜,所以对应于大约6度至20度)的情况下的交叉影线部49中的红外光强度的积分值之间的比率、即10度倾斜与竖直的比率约等于0.6:1。
95.如图10所示,在眼罩附接框8和可移除的眼罩9的内壁部中,接近检测用传感器45捕捉图10所示的图示为交叉影线部50的区域中的光。此时,在接近检测用传感器45以10度角倾斜(从16度至30度的区域)的情况下的交叉影线部50中的检测灵敏度的积分值与接近检测用传感器45不倾斜且面向竖直方向(因为传感器45不以10度角倾斜,所以对应于大约6度至20度)的情况下的交叉影线部分50中的检测灵敏度的积分值的比率、即10度倾斜与竖直的比率约等于0.6:1。
96.具体而言,图9所示的投光侧和图10所示的受光侧的组合比率、即10度倾斜与竖直的比率约等于0.622:1=0.36:1,并且源自眼罩附接框8和可移除的眼罩9的内壁的影响的串扰减少了约64%。此时,因为检测方向指向与evf单元1的光轴平行的方向,所以相对于正面方向的检测信号电平不会受到不利影响。
97.接着,将参照图11说明由目镜窗32中的面内反射引起的串扰。串扰光路是从接近检测用红外led 44发射的红外光在一次反射的情况下行进通过光路51的光路,其中行进通过目镜窗32的r1面,由r2面反射,再次行进通过r1,然后到达接近检测用传感器45。虽然存
在涉及多次反射的情况,但下面将仅说明涉及一次反射的情况,这是因为强度对应于反射次数显著降低。具体而言,由于r2面的反射率约为2%,所以强度在1次反射的情况下为2%,在2次反射的情况下为0.04%,在3次反射的情况下为0.0008%。
98.在接近检测单元47与目镜窗32相对的情况下,图11所示的29度方向上的红外光的强度相对于从接近检测用红外led 44的中心发射的光约为25%。
99.下面将说明在接近检测单元47如图9所示以约10度角倾斜的情况下计算相对于法线的角度的方法。图13是示出根据本发明的第一示例性实施方式的接近检测单元47的主要部分的截面(法线截面)图,并且示出了通过接近检测用红外led 44的中心和点p的接近检测单元47的法线截面图。
100.如图13所示,反射前为29度的、由接近检测用红外led 44的法线与经过点p的线形成的角度因一次反射而变为31度。基于图12所示的光投受特性的曲线图,上述情况下的红外光的强度相对于接近检测用红外led 44的中心为大约22%(10度倾斜与竖直的比率约等于0.22:0.25=0.88:1)。
101.在接近检测单元47中,10度倾斜与竖直的比率总计约等于0.882:1=0.77:1,并且源自目镜窗中的面内反射影响的串扰减少了约23%。
102.如上所述,接近检测单元47相对于目镜窗32以预定角度倾斜,这有效地减少了通过眼罩附接框8的壁面的串扰和通过目镜窗32的面内反射的串扰。
103.接着,将说明evf单元1中的光路分割棱镜单元16和视线检测单元4的结构。根据本示例性实施方式的视线检测单元4至少包括视线成像透镜52、视线检测传感器53以及视线检测用光圈56,并且可以包括视线用红外led 36至43以及光路分割棱镜单元16。
104.图14是示意性地主要示出与根据本发明的第一示例性实施方式的evf单元1中的视线检测功能有关的部分的立体图。图15是主要示出与根据本发明的第一示例性实施方式的evf单元1中的视线检测功能有关的部分的截面图,并且是相对于与evf单元1的光轴平行的方向的横截面图。图16是相对于图14所示的立体图说明性地示出根据本发明的一个方面的evf单元1中的视线检测用光路的图。
105.视线用红外led 36至43以不同取向设置在不同位置,以向用户的眼球发射不同方向的红外光。例如,视线用红外led 36至43相对于目镜窗32的平板玻璃32c的玻璃面以不同取向布置。
106.视线用红外led 36、37、38和39是主要用于近距离照明而发射红外波长光并且使用led作为光源的照明装置。视线用红外led 40、41、42和43是主要用于远距离照明而发射红外波长光并且使用led作为光源的照明装置。
107.视线成像透镜52是视线检测用光学系统,并且将从视线用红外led发射并由用户的眼睛反射的光在视线检测传感器53上形成像。视线检测传感器53是使用诸如ccd图像传感器等固态图像传感器进行视线检测的传感器,并且是能够检测在目镜部107附近的用户眼睛的视线的检测单元。由于视线检测传感器53对用于视线检测的红外波长反射光摄像,所以视线检测传感器53可以被构造为获取彩色图像或单色图像。调节视线检测用光圈56的开口尺寸以调节进入视线检测传感器53的光量并且调节景深,使得用户的眼球图像不模糊。
108.如图15所示,从预定的视线用红外led发射的红外光作为由用户眼球反射的眼球
像行进通过目镜窗32、取景器透镜26、g2透镜25和g1透镜21,并进入第一光路分割棱镜14的第二面14a。入射光的入射光路在图15中被示出为光路54。
109.在第一光路分割棱镜14的第一面14b上,形成反射红外光的二向色层。因此,进入evf单元1之后的用户眼球像被第一面14b反射并朝向第二面14a行进。反射光的光路在图15中被示出为反射光路55a。
110.行进通过反射光路55a的反射光被第二面14a全反射,行进通过成像光路55b,并且经由光圈56通过视线成像透镜52在视线检测传感器53上成像。
111.如图16所示,根据本示例性实施方式的相机本体101将角膜反射像与眼球的瞳孔像一起用于视线检测。角膜反射像是通过用户眼球的角膜142对来自视线用红外led的照明的镜面反射而形成的。
112.图17是说明性地示出用户眼球和反射像的配置的图。图17示出了眼球像和角膜反射像的眼球距离短的情况。在图17中,用户眼球包括瞳孔141和虹膜143,角膜反射像144至147是从视线用红外led发射的光形成的角膜反射像。
113.对应于视线用红外led 36的反射像是角膜反射像144。对应于视线用红外led 37的反射像是角膜反射像145。对应于视线用红外led 38的反射像是角膜反射像146。对应于视线用红外led 39的反射像是角膜反射像147。
114.根据本示例性实施方式的视线检测(视线方向的检测)基于瞳孔中心和角膜反射像之间的相对关系来检测视线。视线检测可以使用例如日本专利第3186072号中讨论的方法,并且省略了视线检测方法的详细说明。
115.《视线检测操作的说明》
116.将参照图18、图19的(a)、图19的(b)和图20说明视线检测方法。图18是说明性地示出视线检测方法的原理的图,并且是示出用于进行视线检测的光学系统的示意图。如图18所示,作为虚拟光源131的光源131a和131b相对于受光透镜130的光轴大致对称地布置并且对用户的眼球140进行照明。从光源131a和131b发射并被眼球140反射的部分光通过受光透镜130聚焦在视线检测传感器53上。图19是说明性地示出视线检测传感器上的眼睛图像的图。图19的(a)是示出由视线检测传感器53摄像的眼睛图像(投影到视线检测传感器53的眼球像)的示意图,图19的(b)是示出视线检测传感器53的ccd输出强度的图。图20是示出根据本发明的第一示例性实施方式的视线检测操作的示意性流程图。
117.如果开始视线检测操作,则在图20的步骤s801中,光源131a和131b朝向用户眼球140发射红外光。利用红外光照明的用户的眼球像行进通过受光透镜130并且形成在视线检测传感器53上,并且视线检测传感器53对形成的像进行光电转换。从而获取眼睛图像的可处理的电信号。
118.在步骤s802中,视线检测单元4将从视线检测传感器53获取的眼睛图像(眼睛图像信号;眼睛图像的电信号)传送到cpu 111。
119.在步骤s803中,cpu 111根据在步骤s802中获取的眼睛图像计算与光源131a和131b的角膜反射像pd和pe以及瞳孔中心c对应的点的坐标。
120.从光源131a和131b发射的红外光对用户眼球140的角膜142进行照明。此时,由角膜142的表面反射的部分红外光形成的角膜反射像pd和pe被受光透镜130聚焦,并且在视线检测传感器53上形成像以获得眼睛图像上的角膜反射像pd’和pe’。类似地,来自瞳孔141的
端部a和b的光束在视线检测传感器53上形成像,以获得眼睛图像上的瞳孔端像a’和b’。
121.图19的(b)示出了关于图19的(a)中的眼睛图像的区域α’的辉度信息(辉度分布)。图19的(b)示出了x轴方向的辉度分布,其中x轴方向是眼睛图像的水平方向并且y轴方向是眼睛图像的竖直方向。根据本示例性实施方式,坐标xd和xe是角膜反射像pd’和pe’在x轴方向(水平方向)上的坐标,坐标xa和xb是瞳孔端像a’和b’在x轴方向上的坐标。如图19的(b)所示,在角膜反射像pd’和pe’的坐标xd和xe处获得了极高水平的辉度。在从坐标xa到坐标xb的区域中,除了在坐标xd和xe处之外,获得了极低水平的辉度。从坐标xa到坐标xb的区域对应于瞳孔141的区域(由来自瞳孔141的光束在视线检测传感器53上形成的瞳孔像的区域)。在瞳孔141外侧的虹膜143的区域(由来自虹膜143的光束形成的在瞳孔像外侧的虹膜像的区域)中获得上述两种辉度之间的中间辉度。具体而言,在小于坐标xa的x坐标(x轴方向的坐标)区域和大于坐标xb的x坐标区域中获得上述两种辉度之间的辉度。
122.从图19的(b)所示的辉度分布获得角膜反射像pd’和pe’的x坐标xd和xe以及瞳孔端像a’和b’的x坐标xa和xb。具体而言,获得具有极高辉度的坐标作为角膜反射像pd’和pe’的坐标,获得具有极低辉度的坐标作为瞳孔端像a’和b’的坐标。另外,在眼球140的光轴相对于虚拟受光透镜130的光轴的旋转角θx小的情况下,由来自瞳孔中心的光束形成在视线检测传感器53上的瞳孔中心像c’(瞳孔像的中心)的坐标xc被表示为xc≈(xa xb)/2。具体而言,根据瞳孔端像a’和b’的x坐标xa和xb计算瞳孔中心像c’的坐标xc。如上所述地估计角膜反射像pd’和pe’以及瞳孔中心像c’的坐标。
123.在步骤s804中,cpu 111计算眼球像的成像倍率β。成像倍率β是基于眼球140相对于受光透镜130的位置确定的倍率,并且是使用角膜反射像pd’和pe’之间的间隔(xd-xe)的函数而获得的。
124.在步骤s805中,cpu 111计算眼球140的光轴相对于受光透镜130的光轴的旋转角。角膜反射像pd和pe之间的中点的x坐标大致与角膜142的曲率中心o的x坐标一致。因此,使用下面的公式(1)计算眼球140在z-x平面(垂直于y轴的平面)中的旋转角θ
x
,其中oc是从角膜142的曲率中心o到瞳孔141的中心c的标准距离。使用与计算旋转角θx的方法类似的方法计算眼球140在z-y平面(垂直于x轴的平面)中的旋转角θy。
125.β
×
oc
×
sinθ
x
≈{(xd xe)/2}
–
xc
ꢀꢀꢀꢀꢀ
(1)。
126.在步骤s806中,cpu 111使用在步骤s805中计算的旋转角θx和θy来计算(估计)用户在evf单元上显示的用于观看的图像上的注视点(视线指向的位置;用户注视的位置)。在注视点的坐标(hx,hy)是与瞳孔中心c对应的坐标的情况下,使用下式(2)和(3)计算注视点的坐标(hx,hy)。
127.hx=m
×
(ax
×
θx bx)
ꢀꢀꢀꢀꢀ
(2)
128.hy=m
×
(ay
×
θy by)
ꢀꢀꢀꢀꢀ
(3)
129.式(2)和式(3)中的参数m是基于相机本体101的取景器光学系统(例如,受光透镜130)的结构确定的常数。参数m也是用于将旋转角θx和θy转换为与用于观看的图像上的瞳孔中心c对应的坐标的转换系数。这些预定并且存储在存储器单元112中。参数ax、bx、ay和by是用于校正视线中的个体差异的视线校正参数。参数ax、bx、ay和by在视线检测操作开始之前通过执行后述的校准操作来获取并存储在存储器单元112中。
130.在步骤s807中,cpu 111将注视点的坐标(hx,hy)存储到存储器单元112中,并且结
束视线检测操作。
131.接着,将参照图21说明光路分割棱镜单元16的详细结构。图21是说明性地示出根据本发明的第一示例性实施方式的光路分割棱镜单元16的结构的图。图21a是示出图15所示的c部的细节的截面图。显示面板18包括半导体芯片18a和玻璃板18b。半导体芯片18a包括有机电致发光(有机el)元件和用于操作有机el元件(显示面)的电路。显示面板18抵靠在面板保持件17的显示面板抵接面17a上并且通过利用例如粘接剂等粘接来固定。面板保持件17由树脂制成。面板保持件17包括位于显示面板抵接面17a的相反侧的棱镜附接面17b。第一双面胶带57、面板遮罩20和第二双面胶带58依次配置在棱镜附接面17b和光路分割棱镜单元16之间并且分别通过利用双面胶带粘接而固定。粘接可以使用例如使用粘合剂的方法。
132.如上所述,本示例性实施方式的特征在于光路分割棱镜单元16被大致密封和附接,而不使用用于防止灰尘进入显示面板18(显示面板单元19)的保护构件。传统的evf包括位于显示面板单元19的前面的用于防止灰尘进入的保护玻璃,使得在观看显示面板的屏幕时看不到灰尘。然而,灰尘可能会附着在保护玻璃的外侧,并且在保护玻璃过度靠近显示面板的显示面的情况下,附着在保护玻璃外侧的灰尘可能会被成像并包括在形成的像中,使得保护玻璃沿着显示面板的光轴以预定距离或更长的距离布置。相反,根据本示例性实施方式,光路分割棱镜单元16在光轴方向上的厚度提供了用于防止光路分割棱镜单元16外侧的灰尘在显示面板的显示面上形成像的距离。因此,在适应视线检测功能的同时,整个取景器的空间被制成为比简单地配置传统的显示面板单元和用于视线检测的光学系统的情况更紧凑。
133.面板遮罩20的第二开口部20a透过来自显示面板18的光和来自视孔的光(来自用户瞳孔的反射光),而面板遮罩20的第二开口部20a以外的部分切断通过光路分割棱镜单元16的端部入射的杂散光。面板遮罩20包含具有高耐热性的材料,以在来自视孔的光束在附近成像的情况下耐热。根据本示例性实施方式,面板遮罩20包含镀有黑色的金属。面板保持件17包括开口部7c,使得开口部7c透过来自显示面板18的光和来自视孔的光束(包括来自用户瞳孔的反射光),而第一开口部17c以外的部分提供了使半导体芯片18a的电路部分从视孔侧不可见的遮罩。虽然根据本示例性实施方式,当从evf透镜单元29侧观看时,第一开口部17c开口到第二开口部20a的外侧,但是本发明不限于上述情况。
134.图21b是示出显示面板单元19和光路分割棱镜单元16的分解立体图,并且与图21a对应的各部分均赋予与图21a中相同的附图标记。
135.根据本示例性实施方式,通过使用夹具将面板遮罩20和光路分割棱镜单元16相对于显示面板18定位,将显示面板单元附接到光路分割棱镜单元16。对于定位,面板保持件17包括y方向基准17d和17e以确定水平和y尺寸,并且包括x方向基准17f以确定x尺寸。使用基准17d、17e和17f来附接面板遮罩20和光路分割棱镜单元16。
136.如上所述,根据本示例性实施方式,在具有视线检测功能的evf单元1中,光路分割棱镜单元16在没有用于防止灰尘进入显示面板单元19中的保护构件的情况下被大致密封和附接。具体而言,根据本示例性实施方式的evf单元1的显示面板单元19和光路分割棱镜单元16附接在一起并形成一体。这使得不需要提供单独的保护玻璃来防止灰尘进入显示面板单元8。因此,减小了从取景器的视孔到显示面板的显示面的光路长度,同时使整个evf的
结构(空间)紧凑,获得了相对于显示面板18的宽视角。另外,使用上述结构便于在组装evf单元1时定位作为显示面板单元19的显示面的光轴、光路分割棱镜单元16的光轴、evf透镜单元29的光轴的三个光轴。
137.另外,根据本示例性实施方式的光路分割棱镜单元16在显示面板18和光路分割棱镜单元16之间的间隔(空间、光路长度)大于预定值。利用该结构,防止用户看到光路分割棱镜单元16上的异物。
138.(第二示例性实施方式)
139.下面将参照图22说明根据本发明的第二示例性实施方式的具有视线检测功能的evf单元。根据本示例性实施方式的evf单元可以应用于相机本体101,相机本体101是与第一示例性实施方式中说明的电子装置类似的电子装置,并且与根据第一示例性实施方式的evf单元1的不同之处在于光路分割棱镜单元的结构。
140.因此,省略与根据第一示例性实施方式的evf单元1的那些部件类似的部件的重复说明,并且将详细说明根据本示例性实施方式的光路分割棱镜单元。
141.图22是示出根据本发明的第二示例性实施方式的光路分割棱镜单元216和显示面板218的分解立体图。如图22所示,根据本示例性实施方式的光路分割棱镜单元216包括第一光路分割棱镜214、第二光路分割棱镜215和黑色遮罩201,并且如第一示例性实施方式中那样,在两个棱镜的附接面上形成二向色层。
142.通过溅射在显示单元侧的第二光路分割棱镜215的入射面上形成黑色遮罩201。黑色遮罩201是图22所示的阴影部。黑色遮罩201包括开口部201a。
143.如第一示例性实施方式中那样,显示面板218包括半导体芯片218a和玻璃板218b。半导体芯片218a包括有机el元件(显示面)和用于操作有机el元件的电路。
144.如上所述,根据本示例性实施方式,显示面板218利用双面胶带202直接附接到第二光路分割棱镜15。具体而言,特征在于设置黑色遮罩201以当用户注视相机本体101的目镜部107时防止在视野上可见不必要的物质。
145.利用上述结构,显示面板218直接附接到第二光路分割棱镜215,不需要用于防止灰尘进入显示面板218的单独的保护玻璃,使得从取景器的视孔到显示面板的显示面的光路长度减小。
146.(第三示例性实施方式)
147.下面将参照图23说明根据本发明的第三示例性实施方式的具有视线检测功能的evf单元。根据本示例性实施方式的evf单元可以应用于相机本体101,相机本体101是与第一示例性实施方式中说明的电子装置类似的电子装置,并且与根据第一示例性实施方式的evf单元1的不同之处在于光路分割棱镜单元的结构。
148.因此,省略与根据第一示例性实施方式的evf单元1的那些部件类似的部件的重复说明,并且将详细说明根据本示例性实施方式的光路分割棱镜单元。图23是示出根据本发明的第三示例性实施方式的光路分割棱镜315和用于显示的半导体芯片318a的分解立体图。如图23所示,根据本示例性实施方式的光路分割棱镜315是与根据第一示例性实施方式的第二光路分割棱镜15类似的棱镜,并且直接附接到包括有机el的半导体芯片318a。
149.如第二示例性实施方式中那样,通过溅射在光路分割棱镜315上形成黑色遮罩301。黑色遮罩301是图23所示的阴影部。黑色遮罩301包括开口部301a。
150.半导体芯片318a利用用于紧密密封的粘合剂直接附接到第二光路分割棱镜215。
151.如上所述,根据本示例性实施方式,光路分割棱镜315直接附接到包括有机el元件(显示面)和用于操作有机el元件的电路的半导体芯片318a。
152.利用上述结构,不需要设置用于元件保护的单独的玻璃或用于防止灰尘进入半导体芯片318a的单独的保护玻璃,并且从目镜部107到显示面板(半导体芯片318a)的显示面的光路长度比上述示例性实施方式更小。
153.(第四示例性实施方式)
154.下面将参照图24至图26说明根据本发明的第四示例性实施方式的作为包括evf单元的电子装置的相机本体的结构。图24是示出作为本发明的第四示例性实施方式的电子装置的相机本体400的外观立体图。根据本示例性实施方式的相机本体400的evf单元401与根据第一示例性实施方式的evf单元1大致相同,因此将说明根据本示例性实施方式的电子装置的部件的配置以及evf单元401的配置和结构。另外,根据本示例性实施方式的相机本体400和根据第一示例性实施方式的相机本体101具有基本相同的部件配置。例如,根据本示例性实施方式的evf单元401与屈光度调节部416和释放按钮405之间的位置关系与根据第一示例性实施方式的相机本体101的位置关系大致相同。因此,将更详细地说明相机本体400的部件的配置。
155.如图24所示,在相机本体400的前面配置有安装座402,能够装卸诸如可更换镜头等相机附件。另外,附件插座403布置在相机本体400的上部并且是能够装卸诸如闪光灯和麦克风等外部装置的连接部。目镜部404布置在相机本体400的背面和相机本体400的上部。
156.握持部419布置在从用户注视evf单元401的目镜部404的背面观看的相机本体400的右侧部。用户可以用手保持握持部419。因此,根据本示例性实施方式,可以由保持相机本体400的用户手动操作的操作单元集中在相机本体400的右侧。例如,释放按钮405和用于调节与摄像条件和模式有关的各种参数的第一操作拨盘407、第二操作拨盘408、第一设定按钮409和第二设定按钮410位于相机本体400的右上部。另外,在根据本示例性实施方式的相机本体400的上部,信息显示部406布置在evf单元401(目镜部404)的右侧。信息显示部406是能够显示诸如与曝光条件有关的快门速度和光圈值、当前摄像模式以及关于是否开启连续摄像的信息等各种类型信息的显示单元。
157.图25是说明性地示出根据本发明的第四示例性实施方式的相机本体400的内部结构的立体图。图26是说明性地示出根据本发明的第四示例性实施方式的相机本体400的内部结构的俯视外观图。如图25和图26所示,屈光度调节部416布置在evf单元401的右侧。
158.如上所述,握持部419、各种操作单元(406至410)和屈光度调节部416主要集中在相机本体400的右侧。由于最常见的情况是用户用右手保持相机本体400的情况,所以对于保持相机本体400的用户来说,这种结构提高了相机本体400的可操作性。
159.如上所述,各种操作单元和屈光度调节部集中在相机本体400的右侧,使得将例如视线检测用的视线检测传感器单元415布置在相机本体400的右侧可能增加相机本体400的尺寸。因此,根据本示例性实施方式的evf单元401的视线检测传感器单元415相对于相机本体400中的evf单元401的光路(或光轴)被布置在与待由用户保持的一侧不同的一侧。具体而言,evf单元401的视线检测传感器单元415相对于evf单元401的透镜单元被布置在握持部419或各种操作单元或屈光度调节部416所布置的那侧的相反侧。
160.如图25和图26所示,快门411、包括图像传感器的图像传感器单元412和显示监视器414设置在相机本体400中的evf单元401的下部。根据本示例性实施方式,evf单元401和显示监视器414被布置为在垂直于相机本体400的摄像光轴的平面(二维平面)上重叠,以减小相机本体400的尺寸和厚度。
161.另外,已知将取景器布置在通过安装座402的直径中心并且是相机本体400的摄像光轴的中心轴的正上方通常会降低用户在对被摄体取景时可能感觉到的违和感。因此,根据本示例性实施方式,evf单元401被布置为在垂直于中心轴的平面上与安装座402的中心轴(摄像光轴)重叠。换言之,在与evf单元401的透镜单元的摄像光轴垂直的二维平面上,evf单元401被布置为与相机本体400和能够装卸到相机本体400的镜头单元的摄像光轴重叠。
162.另外,诸如相机本体400的全球定位系统(gps)单元417等定位单元和诸如用于检测相机本体400的取向和运动的测量单元418等测量单元被布置在evf单元401的前侧。另外,上述的附件插座403布置在evf单元401的上部。与上述各种操作单元类似,前述单元也连接到主基板413。因此,将视线检测传感器单元415布置在单元和evf单元401之间可能导致相机本体400的尺寸增大以及从主基板413到单元的复杂的布线。
163.因此,用于在防止相机本体400的尺寸增大的同时容纳视线检测机构的evf单元401的布局理想地避开了相机本体400的握持区域和不太可能布置其它构件的握持区域的近旁。例如,如上所述,视线检测传感器单元415相对于evf单元401的光轴理想地布置在握持部419和各种操作单元所布置的相机本体400的右侧处布置的握持区域的相反侧。
164.尽管上面已经说明了本发明的各种示例性实施方式,但是本发明不限于这些示例性实施方式,并且可以在不背离本发明的范围的情况下进行各种变型和改变。例如,虽然上面在示例性实施方式中说明了具有相机本体的所谓的可更换镜头摄像设备,其中镜头单元可装卸到相机本体,但是本发明不限于上述那些。例如,可以一体地设置镜头单元和相机本体。
165.另外,虽然摄像设备被说明性地说明为以上在示例性实施方式中说明的应用本发明的电子装置,但是本发明不限于上述那些。例如,示例性实施方式可应用于包括视线检测功能并基于来自视线检测功能的反馈执行控制的装置,诸如头戴式显示器。
166.另外,虽然以上在示例性实施方式中说明了cpu 111综合控制相机本体和镜头单元的构造,但是本发明不限于上述那些。在另一构造中,例如,根据图20所示的流程的(计算机)程序被预先存储在相机本体的存储器单元中。然后,具有图2所示的构造的相机本体101的部件一起协作并执行程序以控制整个摄像系统的操作。另外,程序可以是具有程序功能的任何形式,诸如目标代码、要由解释器执行的程序或要馈送到操作系统(os)的脚本数据。另外,用于馈送程序的记录介质可以是例如硬盘、诸如磁带等磁性记录介质或者光学或磁光记录介质。
167.(其它示例性实施方式)
168.另外,本发明还可以通过以下方法实现。具体而言,用于实现上述示例性实施方式的一个或多个功能的程序经由网络或存储介质被馈送到系统或设备,并且系统或设备的计算机的一个或多个处理器读取程序并执行读取的程序。另外,本发明还可以通过用于实现一个或多个功能的电路(例如,专用集成电路(asic))来实现。
169.本发明不限于上述示例性实施方式,并且可以在不脱离本发明的精神和范围的情况下进行各种改变和变型。因此,附上以下权利要求以陈述本发明的范围。
170.本技术主张2019年10月31日提交的日本专利申请no.2019-199104和2020年10月20日提交的日本专利申请no.2020-176363的优先权,其全部内容通过引用合并于此。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。