马达驱动系统
1.相关申请的交叉引用
2.本技术基于在2019年10月31日申请的专利申请编号2019-199304号,并在此引用其记载内容。
技术领域
3.本公开涉及马达驱动系统。
背景技术:
4.以往,一般而言,在驱动马达的马达驱动系统中,已知有冗余地设置多个进行与马达驱动有关的运算的控制运算部、基于控制运算部生成的驱动信号进行驱动的马达驱动部的结构。例如在专利文献1所公开的控制系统的故障安全控制装置中,若两个ecu中的一个失效,则停止失效的ecu,利用正常的一个ecu继续进行控制。另外,若两个马达中的一个失效,则停止失效的马达,使用正常的一个马达继续进行控制。
5.专利文献1:日本专利第4848717号公报
6.专利文献1所公开的实施例3的装置具备分别控制转向操纵反作用力马达的驱动的两个反作用力ecu-(a)、ecu-(d)、以及分别控制转向马达的驱动的两个转向ecu-(b)、ecu-(c)。例如当一个反作用力ecu-(a)的失效时,停止反作用力ecu-(a),使用正常的一个反作用力ecu-(d)以及两个转向ecu-(b)、ecu-(c),继续进行转向操纵反作用力马达以及转向马达的驱动控制。
7.在本说明书中,将包含专利文献1的“反作用力ecu”以及“转向操纵反作用力马达”的部分概括地称为“第一促动器”,将包含“转向ecu”以及“转向马达”的部分概括地称为“第二促动器”。另外,将专利文献1的“反作用力ecu”以及“转向操纵反作用力马达”称为“第一促动器的控制运算部”以及“第一促动器的马达驱动部”。将专利文献1的“转向ecu”以及“转向马达”称为“第二促动器的控制运算部”以及“第二促动器的马达驱动部”。
8.即,本说明书中的“第一促动器”以及“第二促动器”可以是任意用途的促动器。另外,“促动器”的语句不仅是指通过来自外部的驱动信号进行驱动的机械要素,也指根据在自身的内部具有的控制运算部所生成的驱动信号而马达驱动部输出转矩的驱动装置。此外,促动器内的控制运算部和马达驱动部既可以在物理上一体地构成,也可以经由信号线分体地构成。
9.这里,在专利文献1的以往技术中假定作为“第一促动器的一个控制运算部”的反作用力ecu-(a)与作为“第二促动器的一个控制运算部”的转向ecu-(b)成对,相互收发信息的结构。在第一促动器的一个控制运算部故障的情况下或者在促动器间的通信故障的情况下,输入到成对的第二促动器的控制运算部的信息也成为异常值,或者不能输入信息。因此,有通过成对的第二促动器的控制运算部进行控制的马达驱动部进行误输出,而系统进行误动作的担心。因此,从故障安全的观点来看有问题。
技术实现要素:
10.本公开的目的在于提供防止第一促动器及第二促动器中的任意一个的故障或者促动器间通信的故障所引起的另一个促动器的误输出的马达驱动系统。
11.本公开是具备分别作为输出转矩的马达发挥作用的包括第一促动器以及第二促动器的多个促动器的马达驱动系统。
12.第一促动器以及第二促动器分别具有冗余地设置的多个控制运算部以及冗余地设置的多个马达驱动部。多个控制运算部进行与马达驱动控制有关的运算。多个马达驱动部基于对应的控制运算部生成的驱动信号进行驱动并输出转矩。例如在多相无刷马达中,马达驱动部由供给电压的逆变器、卷绕于定子的多相绕组、具有永磁铁的转子等构成。此外,也可以如多绕组马达那样,在多个马达驱动部中共用地设置转子等。
13.将在各促动器内相互对应的控制运算部与马达驱动部的组合的单位定义为“系统”。第一促动器以及第二促动器中的相互成对的系统的控制运算部彼此通过促动器间通信相互收发信息。
14.当在两个促动器中的任意一个促动器中的任意一个系统中产生了故障时,或者当在任意一个系统的促动器间通信中产生了故障时,产生了故障的系统的各促动器的控制运算部停止马达驱动控制。而且,通过在双方的促动器中正常的系统的控制运算部继续马达驱动控制。
15.由此,在本公开中,在第一促动器及第二促动器中的任意一个的故障,或者任意一个系统的促动器间通信的故障的情况下,能够防止该故障所引起的另一个促动器的误输出,避免系统的误动作。另外,通过在双方的促动器中正常的系统的控制运算部继续马达驱动控制,所以能够确保驱动功能。由此,能够适当地实现故障安全功能。
16.特别是,在两个促动器中的任意一个促动器中的任意一个系统中产生故障,并且该系统的促动器间通信正常时,产生了故障的系统的控制运算部向另一个促动器的成对的系统的控制运算部发送异常信号。接收到异常信号的控制运算部停止马达驱动控制。由此,能够在与产生了故障的系统成对的系统的控制运算部中,迅速地停止马达驱动控制。
附图说明
17.通过参照附图进行的下述的详细记述,本公开的上述目的以及其它的目的、特征、优点变得更加明确。该附图是:
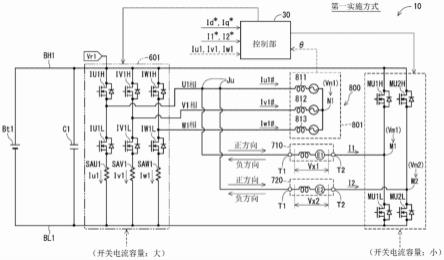
18.图1是第一实施方式的马达驱动系统的整体结构图,
19.图2是图1的马达驱动系统的示意图,
20.图3是表示故障产生时的异常信号的发送的图,
21.图4是故障产生时的马达驱动控制的停止处理的流程图,
22.图5a是表示单系统的故障产生时的输出变化的时序图,
23.图5b是表示双系统合计电流指令值与电流限制值的关系的图,
24.图6是第二实施方式的马达驱动系统的示意图,
25.图7是第三实施方式的马达驱动系统的示意图,
26.图8a是说明四个促动器间的通信的连接形态的图,
27.图8b是说明上述四个促动器间的通信的连接形态的图,
28.图8c是说明上述四个促动器间的通信的连接形态的图,
29.图8d是说明上述四个促动器间的通信的连接形态的图,
30.图9是第四实施方式的马达驱动系统的示意图,
31.图10是其它的实施方式的马达驱动系统的整体结构图。
具体实施方式
32.以下,基于附图对本公开的马达驱动系统的多个实施方式进行说明。各实施方式的马达驱动系统具备分别作为输出转矩的马达发挥作用的多个促动器。各促动器具有冗余地设置的多个控制运算部以及冗余地设置的多个马达驱动部。将在各促动器内相互对应的控制运算部与马达驱动部的组合的单位定义为“系统”。在多个实施方式中对实际相同的结构附加相同的附图标记并省略说明。另外,概括地将第一实施方式~第四实施方式称为“本实施方式”。
33.(第一实施方式)
34.在图1中示出应用于车辆的转向系统901的马达驱动系统801。作为车辆,假定驾驶员不进行方向盘操作的自动驾驶车辆或者无人车辆。转向操纵指令部915根据预先决定的路线程序、基于导航装置的到目的地为止的路线信息,对马达驱动系统801输出转向指令。以双点划线示出的虚拟方向盘910也可以根据转向指令模拟地进行旋转动作。
35.该车辆的左轮99l和右轮99r独立地进行转向。马达驱动系统801具备左轮转向用的第一促动器10和右轮转向用的第二促动器20。在以下的图中,“act”是指“促动器”。第一促动器10基于来自转向操纵指令部915的左轮转向指令cstl输出左轮99l的转向转矩tstl。第二促动器20基于来自转向操纵指令部915的右轮转向指令cstr输出右轮99r的转向转矩tstr。
36.各促动器10、20成为双系统的冗余结构。换句话说,第一促动器10具有冗余地设置的两个控制运算部161、162、以及冗余地设置的两个马达驱动部171、172。第二促动器20具有冗余地设置的两个控制运算部261、262、以及冗余地设置的两个马达驱动部271、272。
37.以下,将各促动器的两个系统表示为“第一系统”以及“第二系统”。例如也可以在第一系统与第二系统之间有主从关系,第一系统作为主(或者主要)系统发挥作用,第二系统作为子(或者从属)系统发挥作用。或者,第一系统与第二系统也可以是对等的关系。针对第一系统的要素,对附图标记的末尾附加“1”,针对第二系统的要素,对附图标记的末尾附加“2”。
38.各促动器10、20的基本结构相同,所以关于利用一方的说明即足够的点,作为代表通过第一促动器10的结构要素来进行说明。第二促动器20能够替换对应的附图标记进行解释。具体而言,控制运算部161、162由微机或者asic构成,进行与马达驱动控制相关的运算。此外,控制运算部161、162也可以一并执行马达驱动控制以外的控制,但在本说明书中未提及其它的控制。在如后述那样控制运算部“停止马达驱动控制”时,是否停止其它的控制不成为问题。
39.详细而言,控制运算部161、162具备未图示的cpu、rom、ram、i/o、以及连接这些结构的总线等。控制运算部161、162执行基于软件处理、硬件处理的控制,软件处理是基于由cpu执行预先存储于rom等实体的存储器装置(即,能够读出的非暂时有形记录介质)的程序
的软件处理,硬件处理是基于专用的电子电路的硬件处理。
40.马达驱动部171、172基于对应的控制运算部161、162生成的驱动信号进行驱动,输出转矩。例如在多相无刷马达中,马达驱动部171、172由供给电压的逆变器、卷绕于定子的多相绕组、具有永磁铁的转子等构成。双系统的马达驱动部171、172协作地输出转矩。例如马达驱动部171、172也可以构成为双系统的多相绕组卷绕于共用的定子的双绕组马达。
41.在图中,从控制运算部161向马达驱动部171的箭头、以及从控制运算部162向马达驱动部172的箭头表示各系统的驱动信号。在多相无刷马达的情况下,驱动信号是逆变器的开关脉冲信号,代表而言是pwm信号等。虽然省略图示,但控制运算部161、162也可以除了来自转向操纵指令部915的转向指令cstl之外,还基于反馈的实际的转向角、其相关量来生成驱动信号。
42.像这样,在本说明书中,使用“促动器”的语句作为包含多个控制运算部和多个马达驱动部的一个单位的驱动装置。例如在专利文献1(专利第4848717号公报)中,与运算驱动信号的ecu分开,仅将作为机械要素的马达主体部分作为促动器进行处理,与本说明书的语句的解释不同。本实施方式的促动器可以作为所谓的“机电一体式”的马达,在物理上一体地构成控制运算部和马达驱动部。或者,也可以作为所谓的“机电分体式”的马达,经由信号线分体地构成控制运算部和马达驱动部。
43.第一促动器10的第一系统与第二促动器20的第一系统相互成对。另外,第一促动器10的第二系统与第二促动器20的第二系统相互成对。第一促动器以及第二促动器中的相互成对的系统的控制运算部彼此通过促动器间通信cl1、cl2相互收发信息。此外,促动器间通信的符号的第二个字符的“l”出自“本地通信”。
44.在通过促动器间通信“相互收发的信息”中至少包含各促动器10、20的异常信息。在控制运算部的异常中包含数据的异常、运算处理的异常、内部通信异常以及同步异常等。在马达驱动部的异常中包含逆变器的开关元件等的异常、以及设置于电路的继电器的短路、开路故障、马达绕组的断线故障等。在产生了这些故障时,各促动器10、20相互收发该信息。
45.在图2中示出使图1的马达驱动系统801简化后的示意图。在图1中,作为具体的应用例示出了左右独立转向系统,但本实施方式的第一促动器10以及第二促动器20可以是任意用途的马达。在图2中,示出一般而言“具备双系统冗余结构的两个促动器10、20的马达驱动系统801”的结构。也根据图2来记载第二实施方式以下的各结构图。在图2中,以虚线框示出各促动器10、20的第一系统以及第二系统,并附加“第一系统101、201”、“第二系统102、202”的附图标记。但是,以下的说明中,有时在根据上下文显而易见的位置等,适当地省略系统的附图标记。
46.虽然与图1的说明重复一部分,但重新记述各促动器10、20的结构。第一促动器10冗余地设置有第一系统101的控制运算部161以及第二系统102的控制运算部162,另外,冗余地设置有第一系统101的马达驱动部171以及第二系统102的马达驱动部172。第二促动器20冗余地设置有第一系统201的控制运算部261以及第二系统202的控制运算部262,另外,冗余地设置有第一系统201的马达驱动部271以及第二系统202的马达驱动部272。
47.在图2的结构中,在各促动器10、20中,来自转向操纵指令部915的指令信号、表示实际的转向角的反馈信号等信息冗余地输入到各系统的控制运算部。换句话说,并不将一
个信息信号分支地输入到各系统的控制运算部,而将第一系统专用地生成的信息信号输入到第一系统,将第二系统专用地生成的信息信号输入到第二系统。
48.例如针对第一促动器10,冗余地向第一系统101的控制运算部161输入信息if11,向第二系统102的控制运算部162输入信息if12。另外,针对第二促动器20,冗余地向第一系统201的控制运算部261输入信息if21,向第二系统202的控制运算部262输入信息if22。由此,在一个系统的控制运算部的输入部故障的情况下,另一个系统的控制运算部能够获取正确的信息。
49.另外,相同的第一促动器10内的第一系统101的控制运算部161与第二系统102的控制运算部162通过系统间通信cm1相互收发信息。相同的第二促动器20内的第一系统201的控制运算部261与第二系统202的控制运算部262通过系统间通信cm2相互收发信息。此外,系统间通信的符号的第二个字符的“m”出自“微机间通信”。在通过系统间通信cm1、cm2相互发送的信息中,例如包含来自外部的输入值、控制运算部运算出的电流指令值、电流限制值、反馈的实际电流等。另外,相互收发各系统的异常信号。
50.如上述那样,第一促动器10的第一系统101与第二促动器20的第一系统201相互成对,第一促动器10的第二系统102与第二促动器20的第二系统202相互成对。换句话说,同一编号的系统彼此相互成对。但是,“第一系统”以及“第二系统”的语句仅是为了方便而分配的语句,将两个系统的哪一个作为“第一系统”,将哪一个作为“第二系统”是自由的。根据系统,也可以使“第一促动器的第一系统”与“第二促动器的第二系统”成对,使“第一促动器的第二系统”与“第二促动器的第一系统”成对。
51.第一促动器10以及第二促动器20中的相互成对的系统的控制运算部彼此通过促动器间通信相互收发信息。因此,各促动器10、20的第一系统的控制运算部161、261彼此通过促动器间通信cl1相互收发信息。各促动器10、20的第二系统的控制运算部162、262彼此通过促动器间通信cl2相互收发信息。
52.接下来,参照图3、图4、图5a以及图5b,以在第一促动器10的第一系统中产生故障的情况为例,对马达驱动系统801的动作进行说明。在图3中示出在图2的马达驱动系统801中在故障产生时发送异常信号的例子。在图4的流程图的说明中,符号“s”表示步骤。
53.在图5a、图5b中,假定基于电流反馈控制的马达驱动,通过基于各系统的控制运算部的限制后的电流指令值,表示故障产生时的马达驱动部的输出变化。在各促动器10、20中通过追随电流指令值从马达驱动部的逆变器向多相绕组流过电流,各促动器10、20的马达驱动部输出所希望的转矩。
54.如图5a所示,在时刻tx以前的正常时,在第一促动器10的第一系统以及第二系统的马达驱动部171、172流过电流限制值i_lim以下的彼此相同的电流i01。另外,在第二促动器20的第一系统以及第二系统的马达驱动部271、272流过电流限制值i_lim以下的彼此相通的电流i02。对于第一促动器10的正常时电流i01与第二促动器20的正常时电流i02的关系来说,根据各促动器10、20的用途、特性,既可以具有相关也可以没有相关。以下,仅着眼于在第一系统与第二系统之间相同这一点,不区分促动器10、20,而将正常时电流仅记为“i
0”。
55.然后,假定在时刻tx在第一促动器10的第一系统中产生故障,此时,在图4的s1中判断为是。另外,在第一系统的促动器间通信cl1中产生故障的情况下,在s1也判断为是。在
s1为是的情况下,在s2中第二促动器20的第一系统的控制运算部261通过s21或者s22的两个步骤,识别第一促动器10的第一系统中的故障产生。此外,在s21中,以促动器间通信正常为前提。
56.在s21中,如图3所示,从第一促动器10的第一系统的控制运算部161向第二促动器20的第一系统的控制运算部261发送异常信号。换句话说,从“产生了故障的促动器中的产生了故障的系统的控制运算部”向另一个促动器的同系统的控制运算部发送异常信号。接收到异常信号的第二促动器20的控制运算部261在s3中停止马达驱动控制。因此在s3中,双方的促动器10、20的第一系统的控制运算部161、261均停止马达驱动控制。
57.另外,在s22中,第二促动器20的第一系统的控制运算部261检知第一促动器10的第一系统的故障。在s3中,第一促动器10的第一系统的控制运算部161停止马达驱动控制,并且检知到故障的第二促动器20的第一系统的控制运算部261停止基于自身的马达驱动控制。此外,在第二促动器20的第一系统的控制运算部261检知到在第一系统的促动器间通信cl1中产生了故障的情况下也同样地停止基于自身的马达驱动控制。
58.在s4中,通过在双方的促动器10、20中正常的第二系统的控制运算部162、262继续马达驱动。在s5中,正常侧系统亦即第二系统的控制运算部162、262使第二系统的马达驱动部172、272的输出相对于两系统的正常时增加,以补充故障侧系统亦即第一系统的马达驱动部171、271的输出。
59.如图5a所示,在时刻tx停止驱动控制,第一系统的电流i0成为0。因此,若通过第二系统的马达驱动部172、272,能够如双点划线所示那样对正常时的两倍的电流(2i0)进行通电,则能够完全维持故障前的双系统的合计输出。但是,在正常时的两倍的电流(2i0)超过电流限制值i_lim的情况下,也可以如实线所示,使第二系统的电流增加至电流限制值i_lim。或者,也可以如点划线所示,使第二系统的电流增加至正常时电流i0与电流限制值i_lim之间的值。
60.无论哪个例子都相当于“使第二系统的马达驱动部的输出相对于两系统的正常时增加,以补充第一系统的马达驱动部的输出”的控制。即,解释为并不限定于完全维持故障前的双系统的合计输出的情况,而通过尽可能使第二系统的电流相对于正常时电流增加,来补充第一系统的马达驱动部的输出的至少一部分。通过使第二系统的马达驱动部的输出适度地增加,能够防止过大的电流所引起的发热。
61.另外,如图5b所示,也可以相对于两系统的正常时的电流限制值i_lim_d,而使单系统的故障时的正常系统的电流限制值i_lim_s增加。由此,能够通过第二系统的单系统驱动补充第一系统的马达驱动部的输出直至双系统合计电流指令值i
*
更大的区域。
62.接着,对在图4的s1中为否的情况下的处理进行说明。在s6中,判断是否第一促动器10内或者第二促动器20内的系统间通信cm1、cm2故障。在s6中为是的情况下,第一促动器10的各系统的控制运算部161、162、以及第二促动器20的各系统的控制运算部261、262在s7中,不停止马达驱动控制,而仅基于自身系统的信息继续马达驱动控制。在系统间通信cm1、cm2也正常的情况下,在s6中判断为否,继续正常时的马达驱动控制。
63.在专利文献1的以往技术中,仅停止失效的ecu直接控制的马达,对于相互进行通信而成对的ecu控制的马达,保持为继续控制。在该结构中,例如在第一促动器10的第一系统故障的情况下,有通过第二促动器20的第一系统的控制运算部261控制的马达驱动部271
进行误输出,而系统进行误动作的担心。
64.与此相对,在本实施方式中,在第一促动器10及第二促动器20中的任意一个的故障或者促动器间通信的故障的情况下,能够防止该故障所引起的另一个促动器的误输出,避免系统的误动作。另外,通过在双方的促动器10、20中正常的系统的控制运算部继续马达驱动控制,所以能够确保驱动功能。由此,能够适当地实现故障安全功能。
65.这里,作为另一个促动器获取产生了故障的信息的方法,从故障的促动器侧的控制运算部发送异常信号,从而能够迅速地停止马达驱动控制。或者,由正常的促动器侧的控制运算部检知故障,从而即使在促动器间通信故障的情况下也能够识别故障信息。并且通过并用双方的方法,能够更迅速更可靠地执行马达驱动控制的停止处理,可靠性进一步提高。
66.另外,通过使相同的促动器内的双系统的控制运算部通过系统间通信相互收发信息,能够在正常时使双系统的马达驱动部协作地进行动作,实现输出平衡较好的马达驱动。但是,在仅系统间通信的故障时,控制运算部不停止马达驱动控制,而仅基于自身系统的信息继续马达驱动控制。由此,即使有系统间的输出平衡稍微有偏差的可能性,但能够尽可能高地维持双系统的合计输出。并且,也能够维持冗余性。
67.接下来,参照与图2相同的示意图对促动器数或者系统数相对于第一实施方式不同的第二实施方式~第四实施方式的马达驱动系统进行说明。在第二实施方式~第四实施方式中冗余地输入向各控制运算部的信息这一点依照第一实施方式,省略各图中的图示。另外,在相应的附图标记许多的情况下等,适当地省略附图标记的记载。此外,仅在第二实施方式~第四实施方式中使用的附图标记不作为“附图标记说明”一栏的附图标记、以及权利要求书的参照附图标记来进行记载。
68.(第二实施方式)
69.图6所示的第二实施方式的马达驱动系统802具备冗余双系统结构的三个促动器10、20、30。例如,马达驱动系统802除了第一实施方式的左右独立转向用的第一促动器10、第二促动器20之外,还具备在线控转向系统中生成反作用力转矩的第三促动器30作为“追加促动器”。第三促动器30通过给予方向盘91与转向操纵转矩以及路面反作用力对应的反作用力转矩,来给予驾驶员适当的转向操纵感。
70.与第一促动器10以及第二促动器20相同,第三促动器30冗余地设置有第一系统301的控制运算部361以及第二系统302的控制运算部362。另外,冗余地设置有第一系统301的马达驱动部371以及第二系统302的马达驱动部372。另外,通过第三促动器30内的系统间通信cm3,第一系统301的控制运算部361与第二系统302的控制运算部362相互收发信息。
71.第三促动器30的第一系统301的控制运算部361通过第一系统的促动器间通信cl1与第一促动器10以及第二促动器20的第一系统的控制运算部161、261相互收发信息。第三促动器30的第二系统302的控制运算部362通过第二系统的促动器间通信cl2与第一促动器10以及第二促动器20的第二系统的控制运算部162、262相互收发信息。
72.假定在三个促动器10、20、30中的任意一个促动器中的任意一个系统中产生了故障时,或者在任意一个系统的促动器间通信中产生了故障时。此时,产生了故障的系统的各促动器10、20、30的控制运算部停止马达驱动控制。而且,通过在全部的促动器10、20、30中正常的系统的控制运算部继续马达驱动控制。在第二实施方式中,能够得到与第一实施方
式相同的作用效果。
73.(第三实施方式)
74.图7所示的第三实施方式的马达驱动系统803应用于左右前后的四轮独立地进行转向并且不具备反作用力促动器的车辆,具备冗余双系统结构的四个促动器10、20、30、40。换句话说,马达驱动系统803具备第三促动器30以及第四促动器40作为“追加促动器”。例如第一促动器10以及第二促动器20使左前轮以及右前轮转向,第三促动器30以及第四促动器40使左后轮以及右后轮转向。
75.第一促动器10、第二促动器20的结构依照第一实施方式。同样地,第三促动器30分别冗余地设置有第一系统301的控制运算部361以及第二系统302的控制运算部362、第一系统301的马达驱动部371以及第二系统302的马达驱动部372。第四促动器40分别冗余地设置有第一系统401的控制运算部461以及第二系统402的控制运算部462、第一系统401的马达驱动部471以及第二系统402的马达驱动部472。
76.另外,通过第三促动器30内的系统间通信cm3,第一系统301的控制运算部361与第二系统302的控制运算部362相互收发信息。通过第四促动器40内的系统间通信cm4,第一系统401的控制运算部461与第二系统402的控制运算部462相互收发信息。
77.另外,各促动器10、20、30、40的第一系统的控制运算部161、261、361、461通过第一系统的促动器间通信cl1相互收发信息。各促动器10、20、30、40的第二系统的控制运算部162、262、362、462通过第二系统的促动器间通信cl2相互收发信息。
78.假定在四个促动器10、20、30、40中的任意一个促动器中的任意一个系统中产生了故障时,或者在任意一个系统的促动器间通信中产生了故障时。此时,产生了故障的系统的各促动器10、20、30、40的控制运算部停止马达驱动控制。而且,通过在全部的促动器10、20、30、40中正常的系统的控制运算部继续马达驱动控制。在第三实施方式中,能够得到与第一实施方式相同的作用效果。
79.作为第三实施方式的变形例,也可以进一步追加与第二实施方式相同的反作用力促动器作为第五促动器。在该情况下也相同,五个促动器的同系统的控制运算部通过促动器间通信相互收发信息。在故障产生时,产生了故障的系统的各促动器的控制运算部停止马达驱动控制,通过在全部的促动器中正常的系统的控制运算部继续马达驱动控制。
80.这里参照图8a~图8d,对促动器间通信的连接形态(拓扑)进行说明。在图8a~图8d中,例示具备四个促动器10、20、30、40的马达驱动系统。在图8a~图8d中,各促动器10、20、30、40的模块表示同系统的控制运算部。
81.在图8a中简化地示出图7的马达驱动系统803中的连接形态。四个促动器10、20、30、40的控制运算部连接为环型。在该例子中,第一促动器10的控制运算部与第四促动器40的控制运算部、以及第二促动器20的控制运算部与第三促动器30的控制运算部能够经由其它的促动器的控制运算部进行通信。在图8b中示出串联型的连接形态。各促动器10、20、30、40的控制运算部能够至少经由其它的促动器的控制运算部与全部的促动器的控制运算部进行通信。
82.在图8c中示出星型的连接形态。在该例子中,位于中心的第一促动器10的控制运算部与其它的全部的促动器的控制运算部进行直接通信。其它的促动器的控制运算部彼此能够经由第一促动器10的控制运算部进行通信。在图8d中示出网型的连接形态。各促动器
10、20、30、40的控制运算部与其它的全部的促动器的控制运算部进行直接通信。
83.各连接形态的优点、缺点是通信技术领域中的公知技术,所以省略说明。此外,在促动器为三个的情况下,环型与网型混同,串联型与星型混同。这样,三个以上的促动器间的促动器间通信的连接形态能够根据上述的基本形、它们的组合来适当地设定。
84.(第四实施方式)
85.图9所示的第四实施方式的马达驱动系统804具备冗余三系统结构的两个促动器10t、20t。第一促动器10t除了与第一实施方式相同的双系统结构之外,还冗余地设置有第三系统103的控制运算部163以及马达驱动部173。第二促动器20t除了与第一实施方式相同的双系统结构之外,还冗余地设置有第三系统203的控制运算部263以及马达驱动部273。
86.通过第一促动器10t内的系统间通信cm1,三系统的控制运算部161、162、163相互收发信息。通过第二促动器20t内的系统间通信cm2,三系统的控制运算部261、262、263相互收发信息。另外,第一促动器10t、第二促动器20t的第三系统的控制运算部163、263彼此通过促动器间通信cl3相互收发信息。
87.在冗余三系统结构的马达驱动系统804中,例如当在第一促动器10t的第一系统101以及第二促动器20t的第二系统202中同时产生了故障时,各促动器10t、20t的第一系统的控制运算部161、261以及第二系统的控制运算部162、262停止马达驱动控制。而且,通过在双方的促动器10t、20t中正常的第三系统的控制运算部163、263继续马达驱动控制。
88.作为第四实施方式的变形例,两个促动器也可以是四系统以上的冗余结构。另外,能够与第二、第三实施方式组合,将相同的技术思想扩展至具备三个以上的三系统以上的冗余结构的促动器的马达驱动系统。此外,对于一部分系统故障,仅利用剩余的正常系统继续马达驱动控制的情况下的处理,例如也可以基于故障前后的动作系统数之比,来切换输出增加程度、上限。
89.另外,关于三系统以上的系统间通信的连接形态(拓扑),将图8a~图8d所示的促动器间通信的连接形态置换为系统间通信来进行解释即可。即,在环型或者串联型的情况下,各系统的控制运算部能够至少经由其它系统的控制运算部与全部的系统的控制运算部进行通信。在星型的情况下,一个系统的控制运算部与其它的全部的系统的控制运算部进行直接通信。在网型的情况下,各系统的控制运算部与其它的全部的系统的控制运算部进行直接通信。这样,三系统以上的系统间通信的连接形态能够根据上述的基本形、它们的组合来适当地设定。
90.(其它的实施方式)
91.(a)作为与应用于车辆的自动转向系统、线控转向线系统的上述实施方式不同的实施方式,在图10中示出电动助力转向(eps)用双马达驱动系统805的例子。一般而言,在电动助力转向系统中,在支柱或者齿条的任意一个设置转向操纵辅助马达。但是,如日本特开2004-82798号公报等所公开的那样,已知有以高输出化、转向操纵性的提高为目的,而在支柱以及齿条双方设置两台转向操纵辅助马达的结构。
92.图10所示的转向系统905与图1所示的自动转向系统901不同,驾驶员自己进行转向操纵的转向操纵机构与转向机构机械连结。转向系统905包括方向盘91、转向轴93、中间轴95、齿条97等。方向盘91经由转向轴93与中间轴95连接。在中间轴95的端部,通过齿条小齿轮机构将旋转转换为往复运动并传递至齿条97。若齿条97进行往复,则经由转向节臂98
而车轮99转向。仅图示单侧的车轮99,省略相反侧的车轮的图示。
93.在双马达驱动系统805中,冗余双系统结构的第一促动器10设置于支柱92,使内包于支柱92的转向轴93旋转。冗余双系统结构的第二促动器20设置于齿条97,经由齿条小齿轮机构使齿条97往复。在各促动器10、20输入有转向操纵转矩传感器94检测出的转向操纵转矩ts。
94.此外,转向轴93中的转向操纵转矩传感器94的位置也可以相对于与第一促动器10的连接部靠方向盘91侧。优选转向操纵转矩ts的信息冗余地输入到第一促动器10的各系统的控制运算部161、162、以及第二促动器20的各系统的控制运算部261、262。
95.在该实施方式中,通过第一促动器10以及第二促动器20协作地输出转向操纵辅助转矩,实现高输出的转向操纵辅助功能。例如在第一促动器10的第一系统中产生了故障时,各促动器10、20的第一系统的控制运算部161、261停止马达驱动控制。而且,通过在双方的促动器10、20中正常的第二系统的控制运算部162、262继续马达驱动控制。由此,即使在一部分的故障产生时也能够维持转向操纵辅助功能。除此之外,本公开的马达驱动系统并不限定于车辆,也可以应用于其它的交通工具、一般设备等。
96.(b)在上述实施方式中,在各促动器中进行系统间通信,冗余地输入向控制运算部的信息,在单系统驱动时增加马达驱动部的输出。但是在其它的实施方式中,也可以仅在一个促动器中进行系统间通信,也可以仅在一个促动器中冗余地输入向控制运算部的信息。或者,也可以仅在一个促动器中,在单系统驱动时增加马达驱动部的输出。另外,也可以在没有系统的请求的情况下,无论在哪个系统中都不进行系统间通信、信息的冗余输入、单系统驱动时的输出增加处理。在上述实施方式中,作为另一个促动器获取产生了故障的信息的方法,从故障的促动器侧的控制运算部发送异常信息。但是作为其它的实施例,也可以故障的促动器侧的控制运算部停止促动器间通信。
97.(c)本公开的马达驱动系统具备两个以上的输出转矩的冗余结构的促动器,通过促动器间的通信,按照系统单位切换基于各促动器的控制运算部的马达驱动控制的停止或者继续。但是,也可以除了成为该控制的对象的促动器以外,还在系统整体中存在独立地进行动作的其它的电动促动器、油压或者气压的促动器。
98.以上,本公开并不限定于上述实施方式,能够在不脱离其主旨的范围内以各种方式实施。
99.也可以由通过构成被编程为执行通过计算机程序具体化的一个或者多个功能的处理器以及存储器来提供的专用计算机实现本公开所记载的控制运算部及其方法。或者,也可以通过由一个以上的专用硬件逻辑电路构成处理器从而提供的专用计算机实现本公开所记载的控制运算部及其方法。或者,也可以通过由被编程为执行一个或者多个功能的处理器以及存储器与通过一个以上的硬件逻辑电路构成的处理器的组合构成的一个以上的专用计算机实现本公开所记载的控制运算部及其方法。另外,计算机程序也可以作为通过计算机执行的指令,存储于计算机能够读取的非迁移有形记录介质。
100.本公开依照实施方式进行了记述。然而,本公开并不限定于该实施方式以及构造。本公开也包含各种变形例以及同等的范围内的变形。另外,各种组合以及方式、进一步在它们中包含仅一个要素、其以上或者其以下的其它的组合以及方式也在本公开的范畴以及思想范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。