1.本发明涉及航天器遥测异常检测技术领域,具体涉及一种基于多分辨率集成的航天器遥测异常检测方法。
背景技术:
2.航天器是系统结构非常复杂精密的高科技机器,有着非常多的遥测传感器,负责收集温度、辐射、功率、仪表和主机活动等方面信息。鉴于这些遥测传感器的复杂性和昂贵的维修成本,监测这些传感器的活动是开展航天活动一个重要和必要的组成部分。航天器遥测数据异常检测是增强航天器在轨可靠性和安全高效运行的主要依据,也是地面运管人员了解和监测航天器在轨运行状态的关键技术。
3.目前,航天器遥测的异常检测方法主要包括:通过可视化序列数据和汇总传感器统计数据的手动分析方法;基于数据的密度和距离等相似性度量的机器学习方法;基于有监督和无监督的深度学习方法。由于航天器遥测数据规模庞大且非常复杂,手动分析遥测数据成本很昂贵,且依赖于特定领域的专家知识。基于相似性度量的机器学习方法通常将遥测序列数据看作高维数据集合分析其分布,这种技术无法获得遥测序列数据的时序依赖性,且容易受噪声影响。由于航天器遥测数据通常缺乏标注信息且异常数据数量远少于正常数据,有监督分类方法适用性大打折扣。因此,本文通过多分辨率集成的无监督方法来自动捕获航天器遥测数据中复杂的时序依赖关系,能够避免噪声数据的影响,从而实现高效的异常检测目标。
技术实现要素:
4.本发明的目的是为了解决现有技术中的上述缺陷,提供一种基于多分辨率集成的航天器遥测异常检测方法,该方法设计一个多分辨率编码模块和一个多分辨率解码模块,结合形状约束损失,自动捕获序列数据中复杂的时序依赖关系,采用下采样操作来过滤数据中的噪声,以无监督方式有效检测航天器遥测数据异常值。
5.本发明的目的可以通过采取如下技术方案达到:
6.一种基于多分辨率集成的航天器遥测异常检测方法,所述航天器遥测异常检测方法包括以下步骤:
7.s1、获取航天器遥测数据,并对遥测数据进行包括标准化在内的预处理;包括标准化在内的预处理操作能够减少数值量纲带来的不利影响。
8.s2、对航天器遥测数据进行下采样,组织成不同长度的输入序列数据;
9.s3、将所述输入序列数据输入多分辨率编码模块,得到隐层特征;
10.s4、融合所述隐层特征,将融合后的隐层特征输入多分辨率解码模块,得到输出序列数据;
11.s5、引入形状约束损失约束输出序列的形状,并结合重构损失迭代训练;
12.s6、根据输入序列和输出序列的重构误差计算相应的异常分数,检测出遥测数据
中的异常值。
13.进一步地,所述步骤s1中包括标准化在内的预处理操作能够减少数值量纲带来的影响。
14.进一步地,所述步骤s2中对航天器遥测传感数据x={x1,x2,
…
,x
t
},其中x
t
表示t时刻的遥测数据,t表示序列数据的长度,进行下采样得到k条下采样序列,下采样过程如下:
[0015][0016]
其中表示第k条下采样序列第t时刻的遥测数据值,k=1,2,....,k,t
(k)
表示序列的长度,τ表示下采样单元的大小,第1条下采样序列x
(1)
=x。对航天器数据进行多次下采样能够有效过滤数据中的噪声,减少了噪声的不利影响。
[0017]
进一步地,所述步骤s3中多分辨率编码模块包括k个基于长短期记忆网络的编码器,编码器的个数与所述下采样序列的数目相同。第k个基于长短期记忆网络的编码器隐层状态融合过程如下:
[0018][0019]
其中,为第k个编码器在t-1时刻的隐层状态,和分别表示第k-1个编码器在τt-1时刻和τt时刻的隐层状态,τ表示下采样单元的大小,β∈(0,1]表示权重系数,表示第k个编码器在t时刻经过多分辨率融合后的隐层状态;
[0020]
将所述隐层状态输入长短期记忆网络进行隐层状态更新,过程如下:
[0021][0022]ct
=f
t
⊙ct-1
i
t
⊙gt
[0023][0024]
其中,和分别表示第k个编码器在t时刻的输入数据和隐层状态,i
t
、f
t
、o
t
分别是长短期记忆网络的输入门、遗忘门和输出门。g
t
是记忆单元临时状态,c
t
是记忆单元状态,σ和tanh均为非线性激活函数,
⊙
表示逐元素相乘,m是由可训练参数组成的仿射变换。通过多分辨率编码模块中长短期记忆网络隐层状态的多分辨率融合及更新,提升了对遥测数据输入序列中复杂时序关系、多尺度时序模式的建模能力。
[0025]
进一步地,所述步骤s4中融合输入序列的隐层特征的过程如下:
[0026][0027]
式中,表示第k个编码器在最后时刻t
(k)
的隐层状态,表示向量间依次拼接操作,m
fc
是由可训练参数组成的仿射变换,表示经过拼接融合后的隐层特征。融合不同长度输入序列的隐层特征可以有效地结合输入序列中多尺度信息,帮助所述多分辨率解码模块获取更充分的隐层特征信息。
[0028]
进一步地,所述多分辨率解码模块包括k个基于长短期记忆网络的解码器,第k个基于长短期记忆网络的解码器隐层状态融合过程如下:
[0029][0030]
其中,为第k个解码器在t 1时刻的隐层状态,为第k 1个解码器在时刻的隐层状态,τ表示下采样单元的大小,为向上取整操作,τ表示下采样单元的大小,β∈(0,1]表示权重系数,表示第k个解码器在t时刻经过多分辨率融合后的隐层状态;
[0031]
将所述隐层状态输入长短期记忆网络进行隐层状态更新及得到输出数据,过程如下:
[0032][0033]ct
=f
t
⊙ct-1
i
t
⊙gt
[0034][0035][0036]
式中,和表示第k个解码器在t时刻的隐层状态、输出数据,i
t
、f
t
、o
t
分别是长短期记忆网络的输入门、遗忘门和输出门。g
t
是记忆单元临时状态,c
t
是记忆单元状态,σ和tanh均为非线性激活函数,
⊙
表示逐元素相乘,m是由可训练参数组成的仿射变换,和表示输出单元的权重和偏置项。多分辨率解码模块中长短期记忆网络隐层状态的多尺度融合能够在很大程度上保持遥测数据时序模式信息在解码过程中不丢失,更好地解码得到输出序列。
[0037]
进一步地,所述步骤s5引入形状约束损失,该形状约束损失基于动态时间规整dtw距离,用来度量两条不等长序列间的相似性,使用含有平滑因子γ》0的dtw距离,表达式为:
[0038][0039]
式中,x={x1,x2,
…
,x
t
}是原始输入序列,是第k个解码器的输出序列,是第k个解码器在t
(k)
时刻的输出数据,a表示输入、输出两条序列的对齐矩阵,表示对齐矩阵a的集合,c表示两条序列对齐的代价矩阵,《a,c》表示这两个矩阵的内积;
[0040]
由于当k≥2时,输出序列的长度t
(k)
比原始输入序列的长度t小,故使用基于dtw距离的形状约束损失,其表达式为:
[0041][0042]
式中,x和分别是原始输入序列和第k个解码器的输出序列,,k是不同长度输入序列的条数;
[0043]
定义另外一项损失函数为等长的输入序列和输出序列间一一对应的重构损失,表达式为:
[0044][0045]
式中,x和分别是原始输入序列和第k个解码器的输出序列,表示矩阵的二范数。
[0046]
由重构损失和形状约束损失组成迭代训练的损失函数l,表达式如下:
[0047][0048]
式中,b是批量训练时批量的大小,λ表示损失项的权重,xb表示批量训练时第b个输入样本,利用反向传播算法对损失函数l最小化,以达到最优。引入形状约束损失,能够帮助输出序列保持原始输入序列的形状和时序模式。
[0049]
进一步地,所述步骤s6使用第1个编码器的输入序列与第1个解码器的输出序列间的重构误差计算每个时刻的异常分数,其中,异常分数越高,代表序列中该时刻的遥测数据越可能是一个异常值,重构误差计算如下:
[0050][0051]
式中,和分别表示第1条输出序列和输入序列在t时刻的数据,e
t
表示t时刻的重构误差;
[0052]
将训练阶段的重构误差值映射到一个高斯分布n(μ,σ)中,μ为均值,σ为协方差
矩阵;
[0053]
在测试阶段中,基于高斯分布n(μ,σ)计算相应的异常分数,具体为:
[0054]
对于每个测试数据x
t
而言,异常概率p(x
t
)定义为:
[0055][0056]
式中d为输入数据x
t
的数据维度;
[0057]
对于观测值x
t
,定义异常分数如下:
[0058]st
=(e
t-μ)
t
σ-1
(e
t-μ)
[0059]
式中,s
t
表示对于序列中t时刻输入数据x
t
计算得到的异常分数,异常分数越高,则代表出现异常的可能性越高,如果异常分数s
t
大于事先预定义的阈值,则将数据x
t
标记为异常。
[0060]
本发明相对于现有技术具有如下的优点及效果:
[0061]
1)本发明设计了一种基于多分辨率集成的方法用于航天器遥测异常检测,利用多分辨率编码、多分辨率解码两个模块可以有效提取遥测数据中的复杂时序依赖性;
[0062]
2)本发明利用下采样操作来过滤航天器遥测数据中的噪声,减少了噪声对方法的不利影响;
[0063]
3)本发明通过形状约束损失来帮助输出序列保持原有的时序模式,结合序列重构损失,有利于进一步凸显序列中的异常值,提高异常检测准确率。
附图说明
[0064]
此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0065]
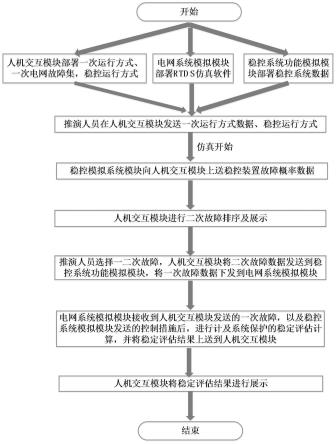
图1是本发明公开的基于多分辨率集成的航天器遥测异常检测方法的具体流程图;
[0066]
图2是本发明的基于多分辨率集成的航天器遥测异常检测方法的模型结构图;
[0067]
图3是本发明公开的基于多分辨率集成的航天器遥测异常检测方法在space shuttle marotta valve time series异常检测数据中的tek16数据样例的异常检测可视化结果图。
具体实施方式
[0068]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0069]
实施例1
[0070]
本实施例公开了一种基于多分辨率集成的航天器遥测异常检测方法,其过程如图1所示,该异常检测方法包括以下步骤:
[0071]
s1、获取航天器遥测数据,并对遥测数据进行包括标准化在内的预处理;
[0072]
航天器携带着众多遥测传感器,负责收集温度、辐射、功率、仪表和主机活动等方面的数据。通过对这些遥测数据的收集整理,可以组织成一组序列化数据,每条序列包含着温度、辐射等多个属性信息。对遥测序列数据进行包括标准化在内的预处理。
[0073]
s2、对航天器遥测数据进行下采样,组织成不同长度的输入序列数据;
[0074]
具体应用中,如图2所示,对航天器遥测序列数据x={x1,x2,
…
,x
t
},其中x
t
表示t时刻的遥测数据,t表示序列数据的长度,进行下采样得到k条下采样序列,下采样过程如下:
[0075][0076]
其中表示第k条下采样序列第t时刻的遥测数据值,k=1,2,....,k,t
(k)
表示序列的长度,τ表示下采样单元的大小,第1条下采样序列x
(1)
=x。例如,原始遥测数据序列长度为128,以τ=2的单元大小去做k=3次下采样操作,则可以得到序列长度为128、64、32的3条不等长遥测序列数据。
[0077]
s3、将输入序列数据输入多分辨率编码模块,得到隐层特征;
[0078]
具体应用中,如图2所示,多分辨率编码模块包括k个基于长短期记忆网络的编码器,编码器的个数与下采样序列的数目相同。这些编码器分别对下采样之后获得不同长度遥测数据输入序列进行编码,同时会有多分辨率信息的相互融合。第k个基于长短期记忆网络的编码器隐层状态融合过程如下:
[0079][0080]
其中,为第k个编码器在t-1时刻的隐层状态,和分别表示第k-1个编码器在τt-1时刻和τt时刻的隐层状态,τ表示下采样单元的大小,β∈(0,1]表示权重系数,表示第k个编码器在t时刻经过多分辨率融合后的隐层状态;
[0081]
将隐层状态输入长短期记忆网络进行隐层状态更新,过程如下:
[0082][0083]ct
=f
t
⊙ct-1
i
t
⊙gt
[0084][0085]
其中,和分别表示第k个编码器在t时刻的输入数据和隐层状态,i
t
、f
t
、o
t
分别是长短期记忆网络的输入门、遗忘门和输出门。g
t
是记忆单元临时状态,c
t
是记忆单元状态,σ和tanh均为非线性激活函数,
⊙
表示逐元素相乘,m是由可训练参数组成的仿射变
换。
[0086]
s4、融合隐层特征,并将融合后的隐层特征输入到多分辨率解码模块,得到输出序列数据;
[0087]
具体应用中,首先对不同长度的输入序列数据经过多分辨率编码模块得到的最后时刻隐层状态进行拼接融合,过程如下:
[0088][0089]
式中,表示第k个编码器在最后时刻t
(k)
的隐层状态,表示向量间依次拼接操作,m
fc
是由可训练参数组成的仿射变换,表示经过拼接融合后的隐层特征。
[0090]
如图2所示,多分辨率解码模块包括k个基于长短期记忆网络的解码器,第k个基于长短期记忆网络的解码器隐层状态融合过程如下:
[0091][0092]
其中,为第k个解码器在t 1时刻的隐层状态,为第k 1个解码器在时刻的隐层状态,τ表示下采样单元的大小,为向上取整操作,τ表示下采样单元的大小,β∈(0,1]表示权重系数,表示第k个解码器在t时刻经过多分辨率融合后的隐层状态;
[0093]
将隐层状态输入长短期记忆网络进行隐层状态更新及得到输出数据,过程如下:
[0094][0095]ct
=f
t
⊙ct-1
i
t
⊙gt
[0096][0097][0098]
式中,和表示第k个解码器在t时刻的隐层状态、输出数据,i
t
、f
t
、o
t
分别是长短期记忆网络的输入门、遗忘门和输出门。g
t
是记忆单元临时状态,c
t
是记忆单元状态,σ和tanh均为非线性激活函数,
⊙
表示逐元素相乘,m是由可训练参数组成的仿射变换,和表示输出单元的权重和偏置项。
[0099]
s5、引入形状约束损失约束输出序列的形状,并结合重构损失迭代训练;
[0100]
具体应用中,引入一个形状约束损失来促使输出序列能够保持原始输入遥测序列
的形状,比如原始输入遥测序列是一种正弦曲线,那么该形状约束损失则会约束输出序列也保持正弦曲线的形状。该形状约束损失基于动态时间规整dtw距离,用来度量两条不等长序列间的相似性,使用含有平滑因子γ》0的dtw距离,表达式为:
[0101][0102]
式中,x={x1,x2,
…
,x
t
}是原始输入序列,是第k个解码器的输出序列,是第k个解码器在t
(k)
时刻的输出数据,a表示输入、输出两条序列的对齐矩阵,表示对齐矩阵a的集合,c表示两条序列对齐的代价矩阵,《a,c》表示这两个矩阵的内积。
[0103]
由于当k≥2时,输出序列的长度t
(k)
比原始输入序列的长度t小,故使用基于dtw损失的形状约束损失,其表达式为:
[0104][0105]
式中,x和分别是原始输入序列和第k个解码器的输出序列,k是不同长度输入序列的条数。
[0106]
定义另外一项损失函数为等长的输入序列和输出序列间一一对应的重构损失,表达式为:
[0107]
式中,x和分别是原始输入序列和第k个解码器的输出序列,表示矩阵的二范数。
[0108]
由重构损失和形状约束损失组成迭代训练的损失函数l,表达式如下:
[0109][0110]
式中,b是批量训练时批量的大小,λ表示损失项的权重,xb表示批量训练时第b个输入样本,利用反向传播算法对损失函数l最小化,以达到最优。
[0111]
s6、根据输入序列和输出序列的重构误差计算相应的异常分数,检测出遥测数据中的异常值。
[0112]
具体应用中,根据遥测数据输入序列和输出序列的重构误差来计算相应的异常分数,再与事先预定义的阈值进行比较,获得检测结果,具体为:
[0113]
假设原始航天器遥测数据的序列长度为128,经过下采样得到的多条输入序列长度分别为128、64和32,则经过多分辨率解码模块得到的输出序列长度分别为128、64和32。由于第1条输入序列和输出序列长度和原始遥测数据相等,都是128。因此,使用这两者的重构误差来计算原始遥测序列中每个时刻的异常分数。异常分数越高,代表序列中该时刻的
遥测数据越可能是一个异常值。重构误差计算如下:
[0114]
式中,和分别表示第1条输出序列和输入序列在t时刻的数据,e
t
表示t时刻的重构误差。
[0115]
将训练阶段的重构误差值映射到一个高斯分布n(μ,σ)中,μ为均值,σ为协方差矩阵;
[0116]
在测试阶段中,基于高斯分布n(μ,σ)来计算相应的异常分数,具体为:
[0117]
对于每个测试数据x
t
而言,异常概率p(x
t
)定义为:
[0118][0119]
式中d为输入数据x
t
的数据维度;
[0120]
对于观测值x
t
,定义异常分数如下:s
t
=(e
t-μ)
t
σ-1
(e
t-μ)
[0121]
式中,s
t
表示对于序列中t时刻输入数据x
t
计算得到的异常分数。异常分数越高,则代表出现异常的可能性越高。如果异常分数s
t
大于事先预定义的阈值,则将数据x
t
标记为异常。
[0122]
通过模型挖掘遥测数据复杂时序依赖性、计算异常分数,与预定义的阈值比较,可以检测出航天器遥测数据中的很多异常状态,比如:辐射和温度变化引起的器件损坏;机械部件由于长期使用导致的机械阻力增大;蓄电池随着充放电次数增多导致的性能退化等。
[0123]
实施例2
[0124]
基于实施例1公开的一种基于多分辨率集成的航天器遥测异常检测方法,本实施例将以由nasa标记的space shuttle marotta valve time series异常检测数据为例,公开一种航天器遥测异常检测方法,过程如图1所示,该方法的模型结构如图2所示,该异常检测方法步骤如下:
[0125]
s1、获取航天器遥测数据,并对遥测数据进行包括标准化在内的预处理;
[0126]
space shuttle marotta valve time series包括多个航天器遥测异常检测数据样例,每个数据样例由传感器记录的一条遥测数据序列构成,反映传感器的工作运行状态。序列中的真实异常值由nasa的工程师运用专业知识标记,用于比较异常检测方法的好坏。对所述遥测数据进行包括标准化在内的数据预处理。
[0127]
s2、对航天器遥测数据进行下采样,组织成不同长度的输入序列数据;
[0128]
对航天器遥测序列数据x={x1,x2,
…
,x
t
},其中x
t
表示t时刻的遥测数据,t表示序列数据的长度,进行下采样得到k条下采样序列,下采样过程如下:
[0129]
其中表示第k条下采样序列第t时刻的遥测数据值,k=1,2,....,k,t
(k)
表示序列的长度,τ表示下采样单元的大小,第1条下采样序列x
(1)
=x。
[0130]
s3、将输入序列数据输入多分辨率编码模块,得到隐层特征;
[0131]
多分辨率编码模块包括k个基于长短期记忆网络的编码器,编码器的个数与所述
下采样序列的数目相同。这些编码器分别对不同长度输入序列进行编码,同时会有多分辨率信息的相互融合。第k个基于长短期记忆网络的编码器隐层状态融合过程如下:
[0132][0133]
其中,为第k个编码器在t-1时刻的隐层状态,和分别表示第k-1个编码器在τt-1时刻和τt时刻的隐层状态,τ表示下采样单元的大小,β∈(0,1]表示权重系数,表示第k个编码器在t时刻经过多分辨率融合后的隐层状态;
[0134]
将隐层状态输入长短期记忆网络进行隐层状态更新,过程如下:
[0135][0136]ct
=f
t
⊙ct-1
i
t
⊙gt
[0137][0138]
其中,和分别表示第k个编码器在t时刻的输入数据和隐层状态,i
t
、f
t
、o
t
分别是长短期记忆网络的输入门、遗忘门和输出门。g
t
是记忆单元临时状态,c
t
是记忆单元状态,σ和tanh均为非线性激活函数,
⊙
表示逐元素相乘,m是由可训练参数组成的仿射变换。
[0139]
s4、融合隐层特征,并将融合后的隐层特征输入到多分辨率解码模块,得到输出序列数据;
[0140]
首先对不同长度的输入序列数据经过多分辨率编码模块得到的最后时刻隐层状态进行拼接融合,过程如下:
[0141][0142]
式中,表示第k个编码器在最后时刻t
(k)
的隐层状态,表示向量间依次拼接操作,m
fc
是由可训练参数组成的仿射变换,表示经过拼接融合后的隐层特征。
[0143]
如图2所示,多分辨率解码模块包括k个基于长短期记忆网络的解码器,第k个基于长短期记忆网络的解码器隐层状态融合过程如下:
[0144][0145]
其中,为第k个解码器在t 1时刻的隐层状态,为第k 1个解码器在
时刻的隐层状态,τ表示下采样单元的大小,为向上取整操作,τ表示下采样单元的大小,β∈(0,1]表示权重系数,表示第k个解码器在t时刻经过多分辨率融合后的隐层状态;
[0146]
将隐层状态输入长短期记忆网络进行隐层状态更新及得到输出数据,过程如下:
[0147][0148]ct
=f
t
⊙ct-1
i
t
⊙gt
[0149][0150][0151]
式中,和表示第k个解码器在t时刻的隐层状态、输出数据,i
t
、f
t
、o
t
分别是长短期记忆网络的输入门、遗忘门和输出门。g
t
是记忆单元临时状态,c
t
是记忆单元状态,σ和tanh均为非线性激活函数,
⊙
表示逐元素相乘,m是由可训练参数组成的仿射变换,和表示输出单元的权重和偏置项。
[0152]
s5、引入形状约束损失约束输出序列的形状,并结合重构损失迭代训练;
[0153]
引入一个形状约束损失来促使输出序列能够保持原始输入遥测序列的形状。该形状约束损失基于动态时间规整dtw距离,用来度量两条不等长序列间的相似性,使用含有平滑因子γ》0的dtw距离,表达式为:
[0154][0155]
式中,x={x1,x2,
…
,x
t
}是原始输入序列,是第k个解码器的输出序列,是第k个解码器在t
(k)
时刻的输出数据,a表示输入、输出两条序列的对齐矩阵,表示对齐矩阵a的集合,c表示两条序列对齐的代价矩阵,《a,c》表示这两个矩阵的内积。
[0156]
由于当k≥2时,输出序列的长度t
(k)
比原始输入序列的长度t小,故使用基于dtw损失的形状约束损失,其表达式为:
[0157][0158]
式中,x和分别是原始输入序列和第k个解码器的输出序列,k是不同长度输入
序列的条数。
[0159]
定义另外一项损失函数为等长的输入序列和输出序列间一一对应的重构损失,表达式为:
[0160]
式中,x和分别是原始输入序列和第k个解码器的输出序列,表示矩阵的二范数。
[0161]
由重构损失和形状约束损失组成迭代训练的损失函数l,表达式如下:
[0162][0163]
式中,b是批量训练时批量的大小,λ表示损失项的权重,xb表示批量训练时第b个输入样本,利用反向传播算法对损失函数l最小化,以达到最优。
[0164]
s6、根据输入序列和输出序列的重构误差计算相应的异常分数,检测出遥测数据中的异常值。
[0165]
根据遥测数据输入序列和输出序列的重构误差来计算相应的异常分数,再与事先预定义的阈值进行比较,获得检测结果,具体为:
[0166]
假设原始航天器遥测数据的序列长度为128,经过下采样得到的多条输入序列长度分别为128、64和32,则经过多分辨率解码模块得到的输出序列长度分别为128、64和32。由于第1条输入序列和输出序列长度和原始遥测数据相等,都是128。因此,使用这两者的重构误差来计算原始遥测序列中每个时刻的异常分数。异常分数越高,代表序列中该时刻的遥测数据越可能是一个异常值。重构误差计算如下:
[0167][0168]
式中,和分别表示第1条输出序列和输入序列在t时刻的数据,e
t
表示t时刻的重构误差。
[0169]
将训练阶段的重构误差值映射到一个高斯分布n(μ,σ)中,μ为均值,σ为协方差矩阵;
[0170]
在测试阶段中,基于高斯分布n(μ,σ)来计算相应的异常分数,具体为:
[0171]
对于每个测试数据x
t
而言,异常概率p(x
t
)定义为:
[0172][0173]
式中d为输入数据x
t
的数据维度;
[0174]
对于观测值x
t
,定义异常分数如下:
[0175]st
=(e
t-μ)
t
σ-1
(e
t-μ)
[0176]
式中,s
t
表示对于序列中t时刻输入数据x
t
计算得到的异常分数。异常分数越高,则代表出现异常的可能性越高。如果异常分数s
t
大于事先预定义的阈值,则将数据x
t
标记为异常。
[0177]
通过模型挖掘遥测数据复杂的时序依赖性、计算每个时刻的异常分数,与预定义的阈值比较,可以很好地检测出遥测数据中传感器元器件损坏导致的异常状态,如图3所示。
[0178]
实施例3
[0179]
本发明公开的基于多分辨率集成的航天器遥测异常检测方法与其他异常检测方法在space shuttle marotta valve time series的两个遥测数据样例(tek16和tek17)的实验结果如表1所示:
[0180]
表1.本发明与其他异常检测方法在遥测数据集上的实验结果表
[0181][0182]
表1中,评价指标(包括auroc、auprc和f1)越高代表该方法性能越优。从表1的实验结果对比可以看到,相比传统的机器学习方法(ocsvm、kmeans)、基于cnn的方法(cnn-ae、mscred)、基于rnn的方法(rrn)和基于gan的方法(beatgan),本发明公开的基于多分辨率集成的异常检测方法在真实航天器遥测数据集上均能取得更优的结果,验证了本发明的有效性和实用性。
[0183]
进一步地,本发明公开的基于多分辨率集成的异常检测检测方法在tek16、tek17数据样例的消融实验结果如表2所示。从表中的结果可以看到,使用多个lstm编解码器进行多分辨率集成和引入形状约束函数能够有效提升异常检测方法的实验性能,进一步验证了本发明提出方法的有效性。
[0184]
表2.tek16、tek17异常检测数据样例的消融实验结果表
[0185][0186]
此外,本发明公开的基于多分辨率集成的航天器遥测异常检测方法在tek16数据样例的异常检测可视化结果如图3所示。图3可视化了tek16样例的真实输入序列和与之等长的输出序列,以及相应的异常分数。tek16数据样例中真实异常是由于传感器元器件损坏引起的,从图3中,可以看到在异常区域中相应的异常分数也是最高的,足以说明该方法能够准确地检测出遥测数据中的异常值。
[0187]
综上所述,本实施例提出的基于多分辨率集成的航天器遥测异常检测方法,利用多分辨率编码、解码两个模块能够有效地提取遥测数据中复杂的时序关系,引入形状约束损失帮助输出序列保持原有的序列模式,进一步凸显遥测数据中的异常值,提高异常检测
方法的性能。
[0188]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。