估计车辆的不同控制器之间的通信响应时间的装置和方法
1.相关申请的交叉引用
2.本技术要求于2020年12月8日提交的韩国专利申请no.10-2020-0170111的优先权和利益,出于所有目的,该专利申请在此通过引用并入,如同在本文中阐述一样。
技术领域
3.本公开的示例性实施例涉及一种用于估计车辆的不同控制器之间的通信响应时间的装置和方法,更具体地,涉及当在车辆的不同控制器之间的通信期间应用确定性调度方法时可以估计接近实际消耗时间(例如,实际消息处理和发送时间)通信响应时间的用于估计车辆的不同控制器之间的通信响应时间的装置和方法,从而以高精度确定应用的起始点偏移。
背景技术:
4.随着车辆功能的提高,每辆车辆都安装了用于电子控制单元(ecu)的许多控制器(例如,微控制器(mcu)和中央处理器(cpu))。
5.这样的控制器通过彼此通信发送/接收特定系统(例如,制动系统、转向系统或传动系统)所需的数据(例如,控制信息和感测信息),从而执行相应系统的功能。
6.此时,通过车辆的通信系统(例如,can、lin或以太网)传送数据。
7.此时,现有的基于事件(或中断)的应用程序执行方法难以保证实时系统中的执行时间,因为执行时间取决于数据(或消息)的大小和处理速度而改变。现有的基于事件的应用程序执行方法的示例包括一种方法,其中,当通过由第一控制器执行的第一应用程序处理的数据由第二控制器发送和接收时,第二控制器执行第二应用程序。
8.因此,为了克服现有的基于事件的调度方法的缺点(即,在实时系统中难以校正执行时间),需要应用确定性调度方法。然而,为了应用确定性调度方法,需要设置精确的任务偏移。为了给确定性调度方法设置精确的任务偏移,需要估计消息处理和发送时间。然而,当未估计消息处理和发送时间时,难以指定偏移。
9.此外,由于在像最近的车辆这样的多控制器环境中难以估计这样的消息处理和发送时间,因此更难以指定偏移。
10.例如,当在通信处理中指定大于实际消耗时间(例如,实际消息处理和发送时间)的偏移时,控制器的可用时间可能会减少。相反,当指定小于实际消耗时间的偏移时,在数据同步处理期间可能出现问题,例如数据同步错误。
11.因此,需要一种用于估计车辆的不同控制器之间的通信响应时间(例如,发送/接收数据所需的时间)的技术,当在车辆的不同控制器之间的通信期间应用确定性调度方法时,该技术可以通过测量或估计接近实际消耗时间(例如,通信过程中的实际消息处理和发送时间)的通信响应时间来高精度地决定应用程序的起始点偏移。
12.本公开的相关技术公开于韩国专利申请公开no.10-2020-0026508中(2020年3月11日公开,其标题为“用于设计碰撞避免的网络装置和控制器的方法”)。
技术实现要素:
13.各种实施例涉及一种用于估计车辆的不同控制器之间的通信响应时间的装置和方法,当在车辆的不同控制器之间的通信期间应用确定性调度方法时,该装置和方法可以测量或估计接近实际消耗时间(例如,实际消息处理和发送时间)的通信响应时间,从而以高精度确定应用的起始点偏移。
14.在一个实施例中,一种用于估计车辆的不同控制器之间的通信响应时间的装置可以包括:数据发送器,被配置为测量在第一控制器向第二控制器发送消息之后直到从第二控制器接收到响应消息所需的实际消息响应时间;估计器,被配置为接收来自第一控制器的数据发送器的消息的大小,并根据指定的估计逻辑反映接收的大小以估计消息响应时间;以及结果数据处理器,被配置为基于实际消息响应时间和通过估计器获取的估计消息响应时间之间的差,校正估计器估计消息响应时间时使用的估计参数,并用校正的估计参数更新估计器的现有估计参数。
15.该装置可进一步包括主机,该主机被配置为从第一控制器的结果数据处理器接收消息的实际消息响应时间和通过估计器获取的估计消息响应时间,并执行结果数据处理器的功能以代替结果数据处理器。
16.消息响应时间可以包括通过将消息的发送时间和消息的响应时间相加而计算的通信响应时间,该通信响应时间指示用于在第一控制器和第二控制器之间进行通信消耗的时间。
17.通信响应时间可以对应于通过从第一控制器测量的消息响应时间减去第二控制器消耗的消息响应时间而计算的时间。
18.当由第一控制器的应用程序处理的消息被发送到第二控制器时,根据确定性调度方法,可以反映对应于估计通信响应时间的1/2的消息发送时间,以设置将由第二控制器执行的应用程序的起始偏移。此外,当由第二控制器的应用程序处理的消息被重新发送到第一控制器的应用程序时,根据确定性调度方法,可以反映对应于估计通信响应时间的1/2的消息响应时间,以设置将由第一控制器执行的应用程序的起始偏移。
19.为了接近于实际通信响应时间估计通信响应时间,估计器可以重复执行消息响应时间的估计和估计参数的更新。
20.第一控制器和第二控制器之间的时间值可以具有通过ptp(精确时间协议)同步的相同时间戳。
21.在一个实施例中,一种用于估计车辆的不同控制器之间的通信响应时间的方法可以包括:通过数据发送器,测量在第一控制器向第二控制器发送消息之后直到从第二控制器接收到响应消息所需的实际消息响应时间;通过估计器,接收来自第一控制器的数据发送器的消息的大小,并根据指定的估计逻辑反映接收的大小以估计消息响应时间;以及通过结果数据处理器,基于实际消息响应时间和通过估计器获取的估计消息响应时间之间的差,校正估计器估计消息响应时间时使用的估计参数,并用校正的估计参数更新估计器的现有估计参数。
22.该方法可进一步包括由主机代替结果数据处理器执行结果数据处理器的功能。在执行结果数据处理器的功能时,主机可以接收来自第一控制器的结果数据处理器的消息的实际消息响应时间和通过估计器获取的估计消息响应时间,基于两者之间的差校正估计器
估计消息响应时间时使用的估计参数,并将校正的估计参数发送到结果数据处理器。
23.结果数据处理器可以基于包括在消息响应时间中的通信响应时间之间的差,校正估计器估计消息响应时间时使用的估计参数。通信响应时间可以指示用于在第一控制器和第二控制器之间进行通信消耗的并且通过将消息发送时间和消息响应时间相加计算的时间。
24.通信响应时间可以是通过从第一控制器测量的消息响应时间减去第二控制器消耗的消息响应时间而计算的时间。
25.当由第一控制器的应用程序处理的消息被发送到第二控制器时,根据确定性调度方法,可以反映对应于估计通信响应时间的1/2的消息发送时间,以设置将由第二控制器执行的应用程序的起始偏移。此外,当由第二控制器的应用程序处理的消息被重新发送到第一控制器的应用程序时,根据确定性调度方法,可以反映对应于估计通信响应时间的1/2的消息响应时间,以设置将由第一控制器执行的应用程序的起始偏移。
26.为了接近于实际通信响应时间估计通信响应时间,估计器可以重复执行消息响应时间的估计和估计参数的更新。
27.根据本公开的实施例,当在车辆的不同控制器之间的通信期间应用确定性调度方法时,估计车辆的不同控制器之间的通信响应时间的装置和方法可以测量或估计接近实际消耗时间(例如,在通信处理期间的实际消息处理和发送时间)的通信响应时间,从而以高精度确定应用的起始点偏移。
附图说明
28.图1是示出根据本公开的实施例的用于估计车辆的不同控制器之间的通信响应时间的装置的示意性配置的示图。
29.图2是用于描述根据本公开的实施例的用于估计车辆的不同控制器之间的通信响应时间的方法的示图。
30.图3a和图3b是用于描述传统的基于事件的调度方法和根据本实施例的确定性调度方法之间的差异的示图。
具体实施方式
31.以下,将通过各种示例性实施例,参考附图描述用于估计车辆的不同控制器之间的通信响应时间的装置和方法。
32.应当注意,这些附图不是精确的比例,可能会夸大线条的厚度或部件的尺寸,仅为了描述的方便和清晰。此外,本文中使用的术语是通过考虑本发明的功能来定义的,并且可以根据用户或操作者的习惯或意图来改变。因此,术语的定义应根据本文阐述的整体公开内容进行。
33.图1是示出根据本公开的实施例的用于估计车辆的不同控制器之间的通信响应时间的装置的示意性配置的示图。
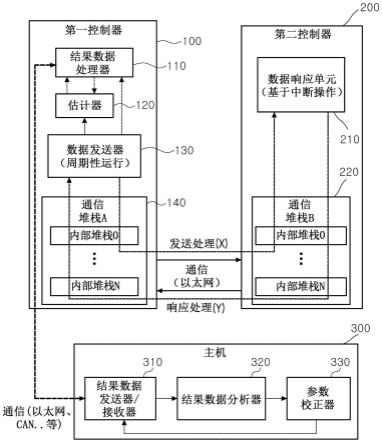
34.参考图1,根据本实施例的用于估计车辆的不同控制器之间的通信响应时间的装置包括第一控制器100、第二控制器200和主机300。第一控制器100包括结果数据处理器110、估计器120、数据发送器130和通信堆栈a 140,第二控制器200包括数据响应单元210和
通信堆栈b 220,以及主机300包括结果数据发送器/接收器310、结果数据分析器320和参数校正器330。
35.控制器100向第二控制器200发送数据。
36.第二控制器200从第一控制器100接收数据,处理接收的数据,然后将关于处理的数据的数据(或响应消息)发送到第一控制器100。
37.例如,当第一控制器100通过包括在其中的数据发送器130发送数据(或消息)时,该数据通过通信堆栈a 140和外部通信网络(例如,以太网)传送到第二控制器200,并且第二控制器200的数据响应单元210通过通信堆栈b 220接收该数据(或消息)。然后,当第二控制器200通过包括在其中的数据响应单元210处理数据,并随后生成并发送响应消息(或响应数据)时,响应消息通过第二控制器200的通信堆栈b 220和外部通信网络(例如,以太网)传送到第一控制器100,并且第一控制器100的数据发送器130通过通信堆栈a 140接收数据。
38.换句话说,第一控制器100的数据发送器130周期性地重复发送处理x,以将数据发送到第二控制器200。此时,数据的大小可能每次都不同。第二控制器200的数据响应单元210响应于接收到的数据而被激活,并执行响应处理y,以向第一控制器100发送响应数据(或响应消息)。
39.第一控制器100的结果数据处理器110测量(收集)执行发送处理x和响应处理y所需的时间(即,x y执行时间)或消息响应时间。
40.第一控制器100的估计器120接收要通过发送处理x发送的数据的大小,并估计执行发送处理x和响应处理y所需的时间(即,x y执行时间)或消息响应时间。
41.此时,估计器120的估计参数包括权重w和偏置b。
42.作为参考,第一控制器100的估计器120可以通过使用任何一种公知技术来执行估计逻辑。例如,可以使用反向传播方法和梯度下降方法作为估计逻辑。反向传播方法和梯度下降方法被广泛应用于作为深度学习基础的神经网络中的误差校正。
43.梯度下降方法是一种求一阶近似的优化算法,其基本思想是计算函数的梯度(斜率),并在与函数梯度(斜率)相反的方向上重复步骤,直到找到局部最小值。此时,可以通过预定数量的测量来获取用作估计参数w和b的初始值的开始值,并且甚至通过执行至少两次测量,也可以不同地设置数据的大小x以获取估计参数w和b。然而,可以执行预定数量的测量以获取平均值。
44.主机300接收由第一控制器100的结果数据处理器110测量的执行发送处理x和响应处理y所需的实际时间(即,实际x y执行时间)或实际消息响应时间、通过估计器120获取的估计时间(即,估计x y执行时间)或估计消息响应时间以及数据大小x,基于它们之间的差校正估计参数w和b,然后将校正的估计参数w和b发送到第一控制器100,以更新估计器120的估计参数w和b。
45.更具体地,主机300通过结果数据发送器/接收器310从第一控制器100的结果数据处理器110接收执行发送处理x和响应处理y所需的实际时间(即,实际x y执行时间)或实际消息响应时间、通过估计器120获取的估计时间(即,估计x y执行时间)或估计消息响应时间以及数据大小x。
46.此外,主机300通过结果数据分析器320将从结果数据处理器110接收的实际x y执
行时间或实际消息响应时间与通过估计器120获取的估计x y执行时间或估计消息响应时间进行比较和分析。
47.此时,由于在实际x y执行时间和估计x y执行时间期间每个控制器产生响应消息所需的时间(或应用处理时间)基本上是固定的时间,因此仅发生通过以太网的消息发送时间或消息响应时间的差异,即通信响应时间的差异。
48.基于比较和分析结果,主机300通过参数校正器330校正估计器120估计x y执行时间(或消息响应时间)时使用的估计参数w和b。然后,主机300通过结果数据发送器/接收器310将校正的估计参数w和b发送到第一控制器100,并更新估计器120的现有估计参数w和b。
49.因此,估计器120可以通过使用校正的估计参数w和b来估计更精确的x y执行时间(即,接近实际x y执行时间的x y执行时间)。即,估计器120可以基本上估计接近通过将经由以太网的消息发送时间和消息响应时间相加而获得的实际通信响应时间(即,用于发送/接收数据消耗的时间)的通信响应时间。
50.更具体地,当假设汽车开放系统架构(autosar)经典平台在用于第一控制器100的mcu上运行,并且自适应平台或自产平台在用于第二控制器200的cpu上运行时,可以由autosar os周期性地执行任务,并且可以在第一控制器100中重复地运行数据发送器130的runnable(线程的接口形式)。
51.此外,通过以太网的第一控制器100中的消息发送/接收处理经过许多通信相关堆栈(例如,com、soad、tcpip、ethif、以太网等)。当通过以太网接收消息时,第二控制器200生成中断以执行任务,并且数据响应单元210由该任务操作。
52.类似地,通过以太网的第二控制器200中的消息发送/接收处理也可以经过相关的通信堆栈,并且可以计算数据发送器130操作和发送消息所需的执行时间t1和数据响应单元210操作和发送响应消息所需的执行时间t2之间的差,以便计算除了第二控制器200生成响应消息所需的时间之外的发送/接收数据(或消息)所需的时间t3(即,通信响应时间)。
53.作为参考,在本实施例中,通过精确时间协议(ptp,其是用于网络之间精确同步的ieee 1588标准时间传输协议)来同步第一和第二控制器100和200之间的时间值,使得第一控制器100和第二控制器20可以以相同的时间戳操作,并且在固定偏移位置处执行的确定性调度应用于每个runnable。
54.图2是用于描述根据本公开的实施例的用于估计车辆的不同控制器之间的通信响应时间的方法的示图。
55.首先,可以通过第一控制器100测量的消息响应时间(响应时间t1)范围为“从数据发送器130的runnable调用时间1到数据发送器130的测量结果发送时间11”,并且通过第二控制器200消耗的消息响应时间(响应时间t2)范围为“从数据响应单元210的runnable调用时间6到数据响应单元210的响应消息发送时间8”。
56.在本实施例中,“通信响应时间”对应于通过从“通过第一控制器100测量的消息响应时间t1”减去“通过第二控制器200消耗的消息响应时间t2”而获得的时间。
57.当假定消息发送时间和消息响应时间彼此相等时,估计消息发送时间为“通信响应时间/2”,估计消息响应时间为“通信响应时间/2”。此时,“通过第二控制器200测量的消息响应时间t2”的时间值可以包括在响应消息的数据中。
58.数据发送器130可以在发送消息之前向估计器120提供消息(或数据)的大小,使得
估计器120可以估计通信响应时间(即,数据发送/接收时间)。
59.估计器120将估计通信响应时间(即,数据发送/接收时间)发送到结果数据处理器110。
60.此外,当接收到响应消息时,数据发送器130将响应消息发送到结果数据处理器110。此时,数据发送器130可以测量实际通信响应时间,并将测量的通信响应时间发送到结果数据处理器110。因此,第一控制器100的结果数据处理器110可以测量实际通信响应时间(或数据发送/接收时间)或收集由数据发送器130测量的实际通信响应时间。
61.结果数据处理器110接收测量的实际通信响应时间(或从数据发送器收集的通信响应时间)、由估计器120估计通信响应时间和数据大小,并根据数据大小比较和分析实际通信响应时间和估计通信响应时间。
62.结果数据处理器110基于比较和分析结果,校正估计器120估计通信响应时间时使用的估计参数w和b,并用校正的估计参数w和b更新估计器120的估计参数w和b。通过以这样的方式重复校正和更新估计参数w和b,估计器120可以通过使用校正的估计参数w和b来估计接近实际通信响应时间的更精确的通信响应时间。
63.然而,在本实施例中,结果数据处理器110可以将实际通信响应时间、估计通信响应时间和数据大小传送到主机300,以校正估计器120的估计参数w和b。然后,结果数据处理器110可以从主机300接收校正的估计参数w和b,并更新估计器120的估计参数w和b。
64.图3a和图3b是用于描述传统的基于事件的调度方法和根据本实施例的确定性调度方法之间的差异的示图。
65.图3a是用于描述传统的基于事件的调度方法的示图,并且图3b是用于描述根据本实施例的确定性调度方法的示图。
66.参考图3a,传统的基于事件的调度方法基于这样的假设:由第一控制器100的应用程序a处理的结果数据(或消息)被发送到第二控制器200的应用程序b,并且由已经从第一控制器接收到结果数据(或消息)的第二控制器200的应用程序b处理的结果数据(或消息)被发送到第一控制器100的应用程序c。在这种情况下,发送时间rs和响应时间rr根据数据(或消息)的大小变得灵活。结果,消息响应时间的响应时间t1也根据发送时间rs和响应时间rr变得灵活。
67.然而,参考示出本实施例的图3b,当由第一控制器100的应用程序a处理的结果数据(或消息)被发送到第二控制器200的应用程序b时,估计发送时间rs',并将其与应用程序a的处理时间wcet_a相加,以设置偏移b。此外,当由第二控制器200的应用程序b处理的结果数据(或消息)被重新发送到第一控制器100的应用程序c时,估计响应时间rr',并将其与应用程序b的处理时间wcet_b相加,以设置偏移c。
68.如上所述,根据本公开的实施例的装置和方法可以测量或估计接近实际消耗时间(例如,在通信处理期间的实际消息处理和发送时间)的通信响应时间,并因此以高精度确定应用程序的起始点偏移,从而在车辆的不同控制器之间的通信期间可以应用确定性调度。
69.尽管已经参考附图中所示的实施例公开了本公开,但实施例仅用于说明目的,并且本领域技术人员将理解,可以进行各种修改和其他等效实施例。因此,本公开的真正技术范围应由以下权利要求定义。此外,例如,本说明书中描述的实施例可以用方法或过程、设
备、软件程序、数据流或信号来实施。尽管仅在单个上下文中讨论特征(例如,仅在方法中讨论),但所讨论的特征可以在另一种类型(例如,装置或程序)中实施。装置可以用合适的硬件、软件或固件来实施。该方法可以在诸如处理器之类的设备中实施,处理器通常指包括计算机、微处理器、集成电路或可编程逻辑设备的处理设备。该处理器还包括通信设备,例如计算机、蜂窝电话、个人数字助理(pda)和另一设备,其促进终端用户之间的信息通信。
70.尽管已经出于说明性目的公开了本公开的示例性实施例,但是本领域技术人员将理解,在不脱离如所附权利要求书中限定的本公开的范围和精神的情况下,可以进行各种修改,添加和替换。因此,本公开的真正技术范围应由以下权利要求定义。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。