1.本发明属于遥感检测技术领域,尤其涉及一种机场净空保护区建筑变化的遥感影像检测方法。
背景技术:
2.近年来,随着航空、航天、卫星等技术的发展,遥感变化检测技术已成为一种有效的监测地球表面变化的手段,也是遥感领域的研究热点之一。遥感变化检测技术是一种通过分析同一地区的前时期数据和后时期的遥感影像,发现地表变化的技术。经过多年的发展,遥感影像变化检测技术无论是在理论还是技术方面都日益成熟,并在建筑物变化检测中得到广泛应用。针对建筑物的变化检测算法通常包含两类:一类是直接比较法,另一类是分类后比较法。直接比较法的主要思路是基于遥感图像中建筑物的光谱、纹理、几何形状等特征,通过直接对比来获取其中发生变化的内容,但由于遥感图像的拍摄过程使得外界因素常常影响图像的成像质量,这导致目前大部分算法的检测结果精度不高,而且对于变化信息的误报率很高,很难将具体算法应用到实际当中。分类后比较法的主要思路为先对前后时相图像中的地物目标做分类处理,然后对比其中的建筑物目标,从而发现变化。但是这类方法的变化检测精度受分类精度影响较大,且两时相建筑物的拍摄角度差异也会对检测结果产生较大影响。
3.此外,在不同时相的遥感影像中,发生变化的地物类型具有多样性,如果仅利用同一规则来检测影像中的所有类型的变化是不切实际的。通过对国内外研究进行综合分析,目前建筑物变化检测技术正在朝以下两个方向发展:(1)变化检测技术趋向于综合利用多类源数据。不同类源数据的图像特征可以相互补充进而提升变化检测效果。(2)变化检测的具体方法由单一检测方法向多方法相互融合的方向演变。
技术实现要素:
4.为解决上述技术问题,本发明提出一种机场净空保护区建筑变化的遥感影像检测方法,针对机场净空保护区监测巡查对建筑物变化监测的实际需求,实现了建筑物变化信息的智能化快速准确提取。
5.为实现上述目的,本发明提供了一种机场净空保护区建筑变化的遥感影像检测方法,包括:
6.获取前期光学遥感影像和前期sar遥感图像对,以及后期光学遥感影像和后期sar遥感图像对,其中,前期与后期分别为需要检测的机场净空保护区建筑变化的时间段的开始时间与结束时间;
7.基于所述前期光学遥感影像,获取前期形态学建筑指数与前期形态学阴影指数,基于所述后期光学遥感影像获取后期形态学建筑指数与后期形态学阴影指数;
8.基于所述前期sar遥感图像对与所述后期sar遥感图像对,获取高程信息,基于前期sar遥感图像和后期sar遥感图像来获取影像失相干指数;
9.基于所述高程信息对所述前期形态学建筑指数、后期形态学建筑指数、前期形态学阴影指数、后期形态学阴影指数进行投影差改正;
10.构建决策森林;
11.将改正后的所述前期形态学建筑指数、前期形态学阴影指数、后期形态学建筑指数、后期形态学阴影指数以及影像失相干指数输入所述决策森林中,获得建筑变化的识别信息。
12.可选地,获取前期形态学建筑指数的步骤包括:
13.对所述前期光学遥感影像进行多尺度分割;
14.获取分割后的所述前期光学遥感影像中每个像素在各波段亮度的最大值,作为分割后的所述前期光学遥感影像中的影像亮度值;
15.基于所述影像亮度值对分割后的所述前期光学遥感影像进行白帽变换;
16.基于白帽变换的结果,获得所述前期形态学建筑指数。
17.可选地,获取后期形态学建筑指数的步骤包括:
18.对所述后期光学遥感影像进行多尺度分割;
19.获取分割后的所述后期光学遥感影像中每个像素在各波段亮度的最大值,作为分割后的所述后期光学遥感影像中的影像亮度值;
20.基于所述影像亮度值对分割后的所述后期光学遥感影像进行白帽变换;
21.基于白帽变换的结果,获得所述后期形态学建筑指数。
22.可选地,获取前期形态学阴影指数的步骤包括:
23.对所述前期光学遥感影像进行多尺度分割;
24.获取分割后的所述前期光学遥感影像中每个像素在各波段亮度的最大值,作为分割后的所述前期光学遥感影像中的影像亮度值;
25.基于所述影像亮度值对分割后的所述前期光学遥感影像进行黑帽变换;
26.基于黑帽变换的结果,获得所述前期形态学阴影指数。
27.可选地,获取后期形态学阴影指数的步骤包括:
28.对所述后期光学遥感影像进行多尺度分割;
29.获取分割后的所述后期光学遥感影像中每个像素在各波段亮度的最大值,作为分割后的所述后期光学遥感影像中的影像亮度值;
30.基于所述影像亮度值对分割后的所述后期光学遥感影像进行黑帽变换;
31.基于黑帽变换的结果,获得所述后期形态学阴影指数。
32.可选地,所述高程信息包括前期高程信息与后期高程信息:
33.对所述前期sar遥感图像对进行干涉处理,获取所述前期高程信息;
34.对所述后期sar遥感图像对进行干涉处理,获取所述后期高程信息。
35.可选地,所述建筑变化的识别信息为:新增建筑物与减少建筑物。
36.可选地,所述新增建筑物与减少建筑物判断条件为:
37.(1)判断所述影像失相干指数是否小于相干阈值,若满足,则进行下一步;
38.(2)分别对投影差改正后的前期、后期形态学阴影指数与阴影指数阈值进行比较,若前期形态学阴影指数大于阴影指数阈值,则提取前期的阴影区域,若后期形态学阴影指数大于阴影指数阈值,则提取后期的阴影区域;
39.(3)分别对投影差改正后的前期形态学建筑指数和阴影指数、后期形态学建筑指数和阴影指数采用双重滤波法进行建筑物识别提取;
40.(4)若前期识别为非建筑物,后期识别为建筑物,则归类至新增建筑物;若前期识别为建筑物,后期识别为非建筑物,则归类至减少建筑物;
41.(5)若前期识别为建筑物,后期识别建筑物,则根据前期高程信息、后期高程信息进行对比,若高程增加,则归类至新增建筑物;若高程减小,则归类至减少建筑物。
42.与现有技术相比,本发明具有如下优点和技术效果:
43.本发明针对机场净空保护区监测巡查对建筑物变化监测的实际需求,基于面向对象的影像分析技术,在充分分析高分辨率遥感影像建筑物影像特征的基础上,利用数学形态学运算实现高分辨率遥感影像中的建筑物特征描述,基于前期光学遥感影像,获取前期形态学建筑指数与前期形态学阴影指数,基于后期光学遥感影像获取后期形态学建筑指数与后期形态学阴影指数;基于前期sar遥感图像对与后期sar遥感图像对,获取高程信息,基于前期sar遥感图像和后期sar遥感图像来获取影像失相干指数;基于高程信息对前期形态学建筑指数、后期形态学建筑指数、前期形态学阴影指数、后期形态学阴影指数进行投影差改正;基于进行投影差改正后的上述指数,利用机器学习算法实现建筑物的智能化识别与变化检测,实现建筑物变化信息的智能化快速准确提取。
附图说明
44.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
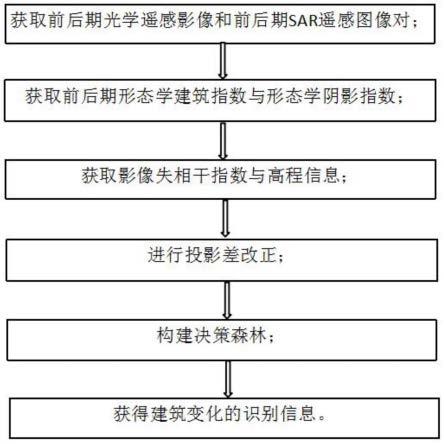
45.图1为本发明实施例一的一种机场净空保护区建筑变化的遥感影像检测方法流程示意图;
46.图2为本发明实施例一的影像对象的多尺度分层网络结构示意图;
47.图3为本发明实施例一的随机森林结构示意图;
48.图4为本发明实施例一的遥感影像数据示意图;
49.图5为本发明实施例一的区域的新增建筑物识别结果。
具体实施方式
50.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
51.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
52.实施例一
53.如图1所示,本实施例提供了一种机场净空保护区建筑变化的遥感影像检测方法包括:
54.获取前期光学遥感影像和前期sar遥感图像对,以及后期光学遥感影像和后期sar遥感图像对,其中,前期与后期分别为需要检测的机场净空保护区建筑变化的时间段的开始时间与结束时间;
55.基于所述前期光学遥感影像,获取前期形态学建筑指数与前期形态学阴影指数,基于所述后期光学遥感影像获取后期形态学建筑指数与后期形态学阴影指数;
56.基于所述前期sar遥感图像对与所述后期sar遥感图像对,获取高程信息,基于前期sar遥感图像和后期sar遥感图像来获取影像失相干指数;
57.在本实施例中,基于前述时间间隔相对较短(如卫星重访周期11天)的两景sar遥感图像组成干涉对来获取前期的建筑物高程信息,基于后期实际间隔相对较短的两景sar遥感图像组成干涉对获取后期的建筑物高程信息,基于时间间隔较长(如半年)的任意一景前期sar遥感图像和任意一景后期sar遥感图像组成干涉对来获取影像失相干指数;
58.基于所述高程信息对所述前期形态学建筑指数、后期形态学建筑指数、前期形态学阴影指数、后期形态学阴影指数进行投影差改正;
59.构建决策森林;
60.将改正后的所述前期形态学建筑指数、前期形态学阴影指数、后期形态学建筑指数、后期形态学阴影指数以及影像失相干指数输入所述决策森林中,获得建筑变化的识别信息。
61.进一步地,获取前期形态学建筑指数的步骤包括:
62.(1)对前期光学遥感影像进行多尺度分割;
63.(2)获取分割后的前期光学遥感影像中每个像素在各波段亮度的最大值,作为分割后的前期光学遥感影像中的影像亮度值;
64.(3)基于影像亮度值对分割后的前期光学遥感影像进行白帽变换;
65.(4)基于白帽变换的结果,获得前期形态学建筑指数。
66.获取后期形态学建筑指数的步骤包括:
67.(1)对后期光学遥感影像进行多尺度分割;
68.(2)获取分割后的后期光学遥感影像中每个像素在各波段亮度的最大值,作为分割后的后期光学遥感影像中的影像亮度值;
69.(3)基于影像亮度值对分割后的后期光学遥感影像进行白帽变换;
70.(4)基于白帽变换的结果,获得后期形态学建筑指数。
71.获取前期形态学阴影指数的步骤包括:
72.对前期光学遥感影像进行多尺度分割;
73.获取分割后的前期光学遥感影像中每个像素在各波段亮度的最大值,作为分割后的前期光学遥感影像中的影像亮度值;
74.基于影像亮度值对分割后的前期光学遥感影像进行黑帽变换;
75.基于黑帽变换的结果,获得前期形态学阴影指数。
76.获取后期形态学阴影指数的步骤包括:
77.对后期光学遥感影像进行多尺度分割;
78.获取分割后的后期光学遥感影像中每个像素在各波段亮度的最大值,作为分割后的后期光学遥感影像中的影像亮度值;
79.基于影像亮度值对分割后的后期光学遥感影像进行黑帽变换;
80.基于黑帽变换的结果,获得后期形态学阴影指数。
81.更进一步地,基于对象的影像处理与分析技术的基础和关键在于影像对象的构
造,通常利用影像分割技术实现。影像分割根据影像特征将影像划分为若干具有某些属性一致性的互不重叠的子区域,而这些子区域可视为影像处理与分析基元即影像对象。
82.分形网络演化算法(fractal net evolution approach,fnea),又称多尺度分割(multi-resolution segmentation,mrs)算法,是一种基于对象思想的影像分割算法。该算法认为影像是由具有语义信息的影像对象及其相互关系构成,算法思路是通过调整尺度参数,自像素层开始进行自底向上的迭代分割,形成影像对象的多尺度分层网络结构,如图2所示。
83.分形网络演化算法实现影像分割的过程实质上是区域增长的过程,区域合并的依据是异质度增长最小。
84.更进一步地,建筑物常用特征有光谱特征、纹理特征、几何特征等。城市地区建筑物屋顶材料普遍为沥青、水泥、金属等,屋顶反射率较高,在遥感影像中的光谱特征表征为亮度较高。建筑物呈现局部不规则而整体规律的影像特性为遥感影像纹理特征。建筑物及其阴影通常相伴而生,建筑物亮度高于阴影,在遥感影像中形成局部明暗对比的特殊纹理特征。建筑物作为典型的人工地物,其造型通常为不同规则几何体的组合且以多边形为主,几何特征十分明显。
85.在充分考虑高分辨率遥感影像中建筑物的光谱、纹理、形状等特征的基础上,本发明利用形态学建筑指数(morphological building index,mbi)和形态学阴影指数(morphological shadowindex,msi)描述高分辨率遥感影像的建筑物特征。
86.(1)形态学建筑指数mbi的构造方法;
87.高分辨率遥感影像中,建筑物由于伴有阴影,存在局部亮度较高的特点。因此形态学建筑指数采用每个像素在各波段亮度的最大值作为影像的亮度值,即
[0088][0089]
式中,b(x,y)为影像中(x,y)处像素的影像亮度值,(x,y)表示像素位置,ik(x,y)表示遥感影像中位置(x,y)处像素点第k个波段的亮度值,k表示遥感影像波段数,k∈[1,k],k为遥感影像总波段数。
[0090]
为提取出高分辨率遥感影像中亮度较大的图斑,即可能的建筑物图斑,形态学建筑指数计算过程中对遥感影像进行白帽变换。
[0091][0092]
式中,wth(d,s)为白帽变换结果,d,s分别表示白帽变换结构元素的方向和尺度,b为影像亮度,表示使用方向为d,大小为s的线性结构元素对亮度影像b进行形态学开运算的结果。
[0093]
通过计算相邻尺度白帽变换结果的差值,构造差分形态学特征(differential morphological profiles,dmp),用以描述同一影像中存在的不同尺度大小的建筑物。
[0094]
dmp
wth
(d,s)=wth(d,s δs)-wth(d,s)
ꢀꢀ
(3)
[0095]
式中,dmp
wth
(d,s)为差分形态学特征,d,s分别表示白帽变换结构元素的方向和尺度,δs为白帽变换的相邻尺度间隔。
[0096]
形态学建筑指数mbi则为差分形态学特征的加权和。
[0097][0098]
式中,dmp
wth
(d,s)为差分形态学特征,d,s分别表示白帽变换结构元素的方向和尺度,d,s分别表示白帽变换结构元素的总方向数和总尺度数。
[0099]
(2)形态学阴影指数msi的构造方法;
[0100]
形态学阴影指数采用每个像素在各波段亮度的最大值作为影像的亮度值,即
[0101][0102]
式中,b(x,y)为影像中(x,y)处像素的影像亮度值,(x,y)表示像素位置,ik(x,y)表示遥感影像中位置(x,y)处像素点第k个波段的亮度值,k表示遥感影像波段数,k∈[1,k],k为遥感影像总波段数。
[0103]
通过对遥感影像进行形态学黑帽变换,提取出遥感影像中亮度值较低的区域,即可能的阴影区域。
[0104][0105]
式中,bth(d,s)为黑帽变换结果,d,s分别表示白帽变换结构元素的方向和尺度,b为影像亮度,表示使用方向为d,大小为s的线性结构元素对亮度影像b进行形态学闭运算的结果。
[0106]
通过计算相邻尺度黑帽变换结果的差值,构造差分形态学特征(differential morphological profiles,dmp),用以描述同一影像中存在的不同尺度大小的阴影。
[0107]
dmp
bth
(d,s)=bth(d,s δs)-bth(d,s)
ꢀꢀ
(7)
[0108]
式中,dmp
bth
(d,s)为差分形态学特征,d,s分别表示黑帽变换结构元素的方向和尺度,δs为黑帽变换的相邻尺度间隔。
[0109]
形态学阴影指数msi则为差分形态学特征的加权和。
[0110][0111]
式中,dmp
bth
(d,s)为差分形态学特征,d,s分别表示白帽变换结构元素的方向和尺度,d,s分别表示白帽变换结构元素的总方向数和总尺度数。
[0112]
进一步地,进行投影差改正的方法为:
[0113]
获取前期sar遥感图像与后期sar遥感图像中影像失相干指数大于预设阈值的建筑物;
[0114]
基于建筑物,根据高程信息对前期形态学建筑指数、后期形态学建筑指数、前期形态学阴影指数、后期形态学阴影指数进行投影差改正。
[0115]
高程信息包括前期高程信息与后期高程信息;
[0116]
对所述前期sar遥感图像对进行干涉处理,获取所述前期高程信息;
[0117]
对所述后期sar遥感图像对进行干涉处理,获取所述后期高程信息。
[0118]
获得建筑变化的识别信息为:新增建筑物与减少建筑物。
[0119]
新增建筑物与减少建筑物判断条件为:
[0120]
(1)判断所述影像失相干指数是否小于相干阈值(0.3~0.5),若满足,则进行下一
步;
[0121]
(2)分别对投影差改正后的前期、后期形态学阴影指数与阴影指数阈值进行比较,若前期形态学阴影指数大于阴影指数阈值(1~2),则提取前期的阴影区域,若后期形态学阴影指数大于阴影指数阈值,则提取后期的阴影区域;
[0122]
(3)分别对投影差改正后的前期形态学建筑指数和阴影指数、后期形态学建筑指数和阴影指数采用双重滤波法进行建筑物识别提取;以前期数据为例,若形态学建筑指数大于第一建筑指数阈值(2.5~5)且其离阴影区域距离小于第一距离指数阈值(25~45);或形态学建筑指数大于第二建筑指数阈值(1~2.5)小于第一建筑指数阈值(2.5~5),且其离阴影区域距离小于第二距离指数阈值(5~15),则将其识别为建筑物,否则将其识别为非建筑物。对后期数据进行类似处理;
[0123]
(4)若前期识别为非建筑物,后期识别为建筑物,则归类至新增建筑物;若前期识别为建筑物,后期识别为非建筑物,则归类至减少建筑物;
[0124]
(5)若前期识别为建筑物,后期识别建筑物,则根据前期高程信息、后期高程信息进行对比,若高程增加,则归类至新增建筑物;若高程减小,则归类至减少建筑物。
[0125]
更进一步地,决策树是一种以实例为基础的归纳学习算法。该算法根据实例的特征空间,通过递归方式对给定数据样本进行分类,形成树状结构分类规则,构建出属性值与分类结果的映射关系。决策树结构包括叶节点、非叶节点以及连接各节点的边,叶节点对应分类结果,非叶节点表示某个特征的测试,而每个分支则表示该特征在某值域的测试结果。
[0126]
决策树的构造就是进行特征选择度量并确定各个特征之间的拓扑结构,包括构建和剪枝两个阶段。决策树构造是一个从上至下、分而治之的过程,本质是一种贪心算法。
[0127]
目前常用的决策树实现算法有id3、c4.5和分类和回归树(classification and regression tree,cart)等。本项目采用cart算法进行变化决策分析,其作为一种非参数、非线性的数据挖掘与分类预测算法,采用基尼系数和方差作为测度指标选择最佳测试变量,构建二叉决策树模型,并采用后修剪技术实现决策树优化。
[0128]
随机森林是一种以决策树为基础分类器的集成分类器。本发明中的随机森林算法根据bagging策略从给定样本集中选取子样本构建不同的决策树并组成森林,森林中每个决策树将对输入数据进行独立分类并得到分类结果,最终分类结果则通过对所有决策树结果进行投票得到,如图3所示。
[0129]
更进一步地,本发明以天津滨海机场净空保护区为例,结合本发明所提出的一种机场净空保护区建筑变化的遥感影像检测方法,来实现该区域内建筑变化的识别信息。
[0130]
本发明实施例所选取的区域位于天津滨海机场净空保护区范围内,处于天津滨海机场南侧,属津南区行政范围内,所要识别的区域位于房地产开发项目“景瑞翰邻”位置附近,为正在建设的居住小区。
[0131]
如图4所示,本发明实施例选用2017年第三季度的worldview2卫星遥感影像和2019年的gf-2卫星遥感影像进行实验,其中worldview2空间分辨率为0.5米,gf-3的空间分辨率为0.8米。
[0132]
采用本发明所提出的一种机场净空保护区建筑变化的遥感影像检测方法的识别结果如图5所示。从2017年第三季度(2017.9)至2019年第二季度(2019.6)的两年时间里,该实验区域新增建筑物共125栋,分别对应着鲁能泰山7号b区、仁恒海和院南苑、雅居乐御宾
府、景瑞翰邻这四个新建小区。
[0133]
以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。