1.本发明涉及视频图像识别领域,具体涉及基于视频图像识别的球团生球粒度分类方法。
背景技术:
2.造球工艺是钢铁冶炼行业中作为提炼铁矿石的一种常用工艺,就是把细磨铁精矿粉或其他含铁粉料添加少量添加剂混合后,在加水润湿的条件下,通过造球机滚动成球,再经过干燥焙烧,固结成为具有一定强度和冶金性能的球型含铁原料。
3.形状规则的直径为10~25mm的球团粒度均匀,微气孔多,还原性好,强度高,且易于贮存,有利于强化炼铁高炉生产。故而在造球工序中必须剔除去直径小于10mm大于25mm的球团生球。若剔除采用振动筛筛分方式,必然会对生球产生伤害,所以正常生产时不易对生球连续全面筛分,而实时根据生球直径情况采用按需筛分。
4.目前,以人眼判断生球的直径情况为主,由人来决定是否对生球进行筛分,这样带来了现场人员工作强度大,主观判断准确度低,生球筛碎概率高等缺点。
技术实现要素:
5.为克服上述缺陷,本发明的目的在于提供一种代替人工判断的基于视频图像识别的球团生球粒度分类方法。
6.为了达到上述发明目的,本发明基于视频图像识别的球团生球粒度分类方法,包括如下步骤:
7.步骤1、制备球团生球图像训练集;
8.步骤2、构建球团生球粒度识别神经网络,并对其网络参数进行初始化,得到初级球团生球粒度识别神经网络;
9.步骤3、构建损失函数,以损失函数最小为目标,并通过训练集对初级球团生球粒度识别神经网络进行训练,直至损失函数小于α,得到训练完成的球团生球粒度识别神经网络;
10.步骤4、采集待识别的球团生球图像,将待识别球团生球图像预处理后输入训练完成的球团生球粒度识别神经网络中,得到球团生球粒度分类的数量统计结果。
11.进一步的,所述的球团生球图像训练集的制备步骤包括:
12.1.1、采集不同粒度等级gn(n为自然数)的球团生球图像,且每个粒度等级的球团生球图像采集n(n为自然数)张;
13.1.2将采集的不同粒度等级的球团生球图像进行预处理,并将预处理过后的不同粒度等级的球团生球图像作为训练集;
14.进一步的,所述步骤2中对不同粒度等级的球团生球图像进行预处理的具体方法为:
15.2-1、对不同粒度等级的球团生球图像依次进行高斯滤波、均值滤波、最小均方差
滤波和gabor滤波,得到一级处理球团生球图像;
16.2-2、将一级处理球团生球图像进行灰度化处理,得到二级处理球团生球图像;
17.2-3、求取二级处理球团生球图像中像素点的梯度,并根据梯度将二级处理球团生球图像进行灰度表示,得到三级处理球团生球图像;
18.2-4、将三级处理球团生球图像进行轮廓化,并将轮廓边界框定矩形,得到四级处理球团生球图像;
19.2-5、提取四级处理球团生球图像中各个球团生球的像素点的矩形区域,获取预处理后的不同粒度等级的球团生球图像。
20.进一步的,所述步骤2-3的具体步骤为:
21.3-1、依次求取二级处理球团生球图像函数f(x,y)中每个像素点的梯度g[f(x,y)]为:
[0022]
g[f(x,y)]=|f(i,j)-f(i 1,j 1)| |f(i 1,j)-f(i,j 1)|
[0023]
其中,x表示像素点的横坐标,y表示像素点的纵坐标,x=0,1,2,
…
,x,y=0,1,2,
…
,y,x表示最大横坐标,y表示最大纵坐标,i∈x,j∈y;
[0024]
3-2、设定灰度阈值t,根据灰度阈值t和每个像素点的梯度g[f(x,y)],将二级处理球团生球图像进行灰度g(x,y)表示,得到三级处理球团生球图像;所述灰度g(x,y)为:
[0025][0026]
其中,m表示位于轮廓上的像素点,n表示非轮廓线上的像素点。
[0027]
进一步的,所述步骤2-4的具体步骤为:
[0028]
4-1、随机在三级处理球团生球图像中寻找一个灰度g(x,y)=m的像素点,记该像素点为(x0,y0);
[0029]
4-2、以像素点(x0,y0)为中心,提取像素点(x0,y0)的所有相邻像素点中灰度为m的像素点;
[0030]
4-3、选取步骤4-2中灰度为m的像素点中梯度最大的像素点,并以此梯度最大的像素点为中心,提取其所有相邻像素点中灰度为m的像素点;
[0031]
4-4、根据步骤4-3的方法进行类推,获取三级处理球团生球图像中的轮廓像素点,得到四级处理球团生球图像。
[0032]
进一步的,所述步骤2-5中提取四级处理球团生球图像中轮廓区域,获取预处理后的不同粒度等级的球团生球图像的具体步骤为:提取不同粒度等级的四级处理球团生球图像中包含所有轮廓像素点的矩形区域,获取预处理后的不同粒度等级的球团生球图像。
[0033]
进一步的,所述步骤3中球团生球粒度识别神经网络的具体结构包括依次连接的输入层、第一卷积层conv-1、第一最大池化层maxpool-1、第二卷积层conv-2、第二最大池化层maxpool-2、第三卷积层conv-3、第三最大池化层maxpool-3、第一全连接层fc-1、第二全连接层fc-2、第三全连接层fc-3、softmax层和输出层。
[0034]
所述步骤4中的损失函数l具体为:
[0035][0036]
其中,m=0,1,2,
…
,m,m表示每一类粒度的球团生球图像样本的总数,n=0,1,2,
…
,n,n表示球团生球图像样本类别数,δ(ym=n)表示球团生球识别神经网络计算得到的第m个样本的输出结果为第n类情况下的激活函数值,表示第m个样本为第n类的概率。
[0037]
进一步的,所述步骤5中将预处理后的待识别球团生球图像输入训练完成的球团生球粒度识别神经网络中,得到球团生球粒度分类的数量统计结果具体步骤为:
[0038]
9-1、将预处理后的待识别图像输入训练完成的球团生球识别神经网络中;
[0039]
9-2、采集输出层的分类结果为p
qn
为待识别图像中第q个球团生球对应第gn粒度等级的概率。
[0040]
9-3、选取p
q1
,p
q2
,
…
,p
qn
中的最大值,该最大值对应的粒度等级作为第q个球团生球的粒度等级;
[0041]
9-4、统计待识别图像中对应gn粒度等级的球团生球数量,并计算出各粒度等级的百分比。
[0042]
本发明通过实现球团生球粒度分类的数量统计、占比分析,辅助生产操作人员或现场工作人员调节打水量,使球团生球粒度范围回归正常。
附图说明
[0043]
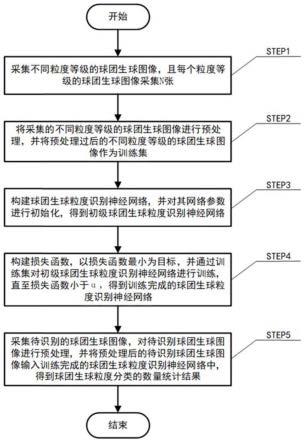
图1为本发明基于视频图像识别的球团生球粒度分类方法流程图;
[0044]
图2为本发明中球团生球粒度识别神经网络示意图;
具体实施方式
[0045]
下面结合附图和实施例对本发明作进一步说明
[0046]
图1为本发明基于视频图像识别的球团生球粒度分类方法流程图;如图1所示,本发明包括如下步骤:
[0047]
步骤1、制备球团生球图像训练集;
[0048]
步骤2、构建球团生球粒度识别神经网络,并对其网络参数进行初始化,得到初级球团生球粒度识别神经网络;
[0049]
步骤3、构建损失函数,以损失函数最小为目标,并通过训练集对初级球团生球粒度识别神经网络进行训练,直至损失函数小于α,得到训练完成的球团生球粒度识别神经网络;
[0050]
步骤4、采集待识别的球团生球图像,将待识别球团生球图像预处理后输入训练完成的球团生球粒度识别神经网络中,得到球团生球粒度分类的数量统计结果。
[0051]
进一步的,所述的球团生球图像训练集的制备步骤包括:
[0052]
1.1、采集不同粒度等级gn(n为自然数)的球团生球图像,且每个粒度等级的球团生球图像采集n(n为自然数)张;
[0053]
1.2将采集的不同粒度等级的球团生球图像进行预处理,并将预处理过后的不同粒度等级的球团生球图像作为训练集;
[0054]
进一步的,所述步骤2中对不同粒度等级的球团生球图像进行预处理的具体方法为:
[0055]
2-1、对不同粒度等级的球团生球图像依次进行高斯滤波、均值滤波、最小均方差滤波和gabor滤波,得到一级处理球团生球图像;
[0056]
2-2、将一级处理球团生球图像进行灰度化处理,得到二级处理球团生球图像;
[0057]
2-3、求取二级处理球团生球图像中像素点的梯度,并根据梯度将二级处理球团生球图像进行灰度表示,得到三级处理球团生球图像;
[0058]
2-4、将三级处理球团生球图像进行轮廓化,并将轮廓边界框定矩形,得到四级处理球团生球图像;
[0059]
2-5、提取四级处理球团生球图像中各个球团生球的像素点的矩形区域,获取预处理后的不同粒度等级的球团生球图像。
[0060]
进一步的,所述步骤2-3的具体步骤为:
[0061]
3-1、依次求取二级处理球团生球图像函数f(x,y)中每个像素点的梯度g[f(x,y)]为:
[0062]
g[f(x,y)]=|f(i,j)-f(i 1,j 1)| |f(i 1,j)-f(i,j 1)|
[0063]
其中,x表示像素点的横坐标,y表示像素点的纵坐标,x=0,1,2,
…
,x,y=0,1,2,
…
,y,x表示最大横坐标,y表示最大纵坐标,i∈x,j∈y;
[0064]
3-2、设定灰度阈值t,根据灰度阈值t和每个像素点的梯度g[f(x,y)],将二级处理球团生球图像进行灰度g(x,y)表示,得到三级处理球团生球图像;所述灰度g(x,y)为:
[0065][0066]
其中,m表示位于轮廓上的像素点,n表示非轮廓线上的像素点。
[0067]
进一步的,所述步骤2-4的具体步骤为:
[0068]
4-1、随机在三级处理球团生球图像中寻找一个灰度g(x,y)=m的像素点,记该像素点为(x0,y0);
[0069]
4-2、以像素点(x0,y0)为中心,提取像素点(x0,y0)的所有相邻像素点中灰度为m的像素点;
[0070]
4-3、选取步骤4-2中灰度为m的像素点中梯度最大的像素点,并以此梯度最大的像素点为中心,提取其所有相邻像素点中灰度为m的像素点;
[0071]
4-4、根据步骤4-3的方法进行类推,获取三级处理球团生球图像中的轮廓像素点,得到四级处理球团生球图像。
[0072]
进一步的,所述步骤2-5中提取四级处理球团生球图像中轮廓区域,获取预处理后的不同粒度等级的球团生球图像的具体步骤为:提取不同粒度等级的四级处理球团生球图像中包含所有轮廓像素点的矩形区域,获取预处理后的不同粒度等级的球团生球图像。
[0073]
进一步的,如图2所示,所述步骤3中球团生球粒度识别神经网络的具体结构包括依次连接的输入层、第一卷积层conv-1、第一最大池化层maxpool-1、第二卷积层conv-2、第
二最大池化层maxpool-2、第三卷积层conv-3、第三最大池化层maxpool-3、第一全连接层fc-1、第二全连接层fc-2、第三全连接层fc-3、softmax层和输出层。
[0074]
所述步骤4中的损失函数l具体为:
[0075][0076]
其中,m=0,1,2,
…
,m,m表示每一类粒度的球团生球图像样本的总数,n=0,1,2,
…
,n,n表示球团生球图像样本类别数,δ(ym=n)表示球团生球识别神经网络计算得到的第m个样本的输出结果为第n类情况下的激活函数值,表示第m个样本为第n类的概率。
[0077]
进一步的,所述步骤5中将预处理后的待识别球团生球图像输入训练完成的球团生球粒度识别神经网络中,得到球团生球粒度分类的数量统计结果具体步骤为:
[0078]
9-1、将预处理后的待识别图像输入训练完成的球团生球识别神经网络中;
[0079]
9-2、采集输出层的分类结果为p
qn
为待识别图像中第q个球团生球对应第gn粒度等级的概率。
[0080]
9-3、选取p
q1
,p
q2
,
…
,p
qn
中的最大值,该最大值对应的粒度等级作为第q个球团生球的粒度等级;
[0081]
9-4、统计待识别图像中对应gn粒度等级的球团生球数量,并计算出各粒度等级的百分比。
[0082]
本发明通过实现球团生球粒度分类的数量统计、占比分析,辅助生产操作人员或现场工作人员调节打水量,使球团生球粒度范围回归正常。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
