1.本实用新型涉及自动生产技术领域,具体涉及一种晶圆表面硬胶清洁自动化设备。
背景技术:
2.随着半导体技术的不断发展,对工艺技术的要求越来越高,特别是对晶圆片的表面质量要求越来越严。晶圆制造环节的清洗步骤最多,清洗设备运用也最多,光刻、刻蚀、沉积、离子注入、cmp均需要经历清洗工艺。
3.晶圆片清洗质量的好坏对器件性能有严重的影响,在目前的集成电路生产中,由于晶圆片表面沾污问题,导致50%以上的材料被损耗掉和80%的芯片电学失效。由于晶圆清洗是半导体制造工艺中最重要、最频繁的工序,而且随着尺寸缩小、结构复杂化,芯片对杂质含量的敏感度也相应提高,将直接影响到器件的成品率、性能和可靠性,所以国内外各大公司、研究机构等对清洗工艺的研究一直在不断地增强。
4.目前,在先进制程中,单片清洗逐渐取代槽式批量清洗,单片晶圆清洗可以减少材料损伤,提高孔洞的清洗能力,防止晶片结构损伤,清除交叉污染,改善晶圆可靠性,在更低线宽nm级工艺中,对杂质的容忍度较低,工艺越先进,单片清洗技术的占比往往越高。然而,目前晶圆片清洗的工艺中,由于其流程复杂且不可控,易对产品造成二次污染,对去除产品上的胶成功率较低,产品还会产生破片风险,这些清洗工艺中的问题急需解决。
技术实现要素:
5.本实用新型的目的在于提供一种晶圆表面硬胶清洁自动化设备,将固化后的晶圆片表面硬胶用刀片去除,再将晶圆片侧面硬胶用刀片去除,再采用定量清洗液进行喷洒后,先用海绵进行去胶擦拭、再用无尘布进行擦拭,每个工位机构均满足柔性生产的要求,对晶圆片不会有任何伤害,满足生产过程可控、破片风险较低的生产要求。
6.为实现上述目的,本实用新型提供如下技术方案:一种晶圆表面硬胶清洁自动化设备,包括安装架、进料储物盒、表面硬胶去除机构、侧面硬胶去除机构、用于清洗晶圆片的清洗机构、用于检测晶圆片的视觉检测机构、成品储物盒、机械手;
7.所述机械手安装于安装架的安装平台上;所述进料储物盒、表面硬胶去除机构、侧面硬胶去除机构、清洗机构、视觉检测机构、成品储物盒依次环绕所述机械手布局;
8.所述表面硬胶去除机构包括刮刀组件a、滑轨a、晶圆安装架a、驱动电机a;所述滑轨a垂直安装于安装平台上,所述刮刀组件a安装于所述滑轨a上并可沿其轨道做上下滑移式运动;所述晶圆安装架a安装于安装平台上,晶圆安装架a的上表面安装有用于固定晶圆片的盘面a,且所述刮刀组件a与盘面a成上下相对式布设;所述驱动电机a安装于晶圆安装架a的内部,且所述驱动电机a的驱动轴与盘面a的中心连接并可带动所述盘面a做水平转动式运动;
9.所述侧面硬胶去除机构包括刮刀组件b、滑轨b、晶圆安装盘b、驱动电机b;所述滑
轨b水平安装于安装平台上,所述刮刀组件b安装于所述滑轨b上并可沿其轨道做水平滑移式运动;所述晶圆安装盘b安装于安装平台上,晶圆安装盘b的上表面安装有用于固定晶圆片的盘面b,且所述刮刀组件b布设于所述盘面b侧周;所述驱动电机b安装于晶圆安装盘b的内部,且所述驱动电机b的驱动轴与盘面b的中心连接并可带动所述盘面b做水平转动式运动;
10.所述机械手可携带晶圆片依次经过表面硬胶去除机构、侧面硬胶去除机构、清洗机构、视觉检测机构,并将处理后的晶圆片输送至储物盒内。
11.进一步地,所述晶圆片通过吸附的方式固定于所述盘面a和/或盘面b上。
12.进一步地,所述刮刀组件a的底盘下表面安装有若干刮刀a,且若干刮刀a沿刮刀组件a底盘下表面的中心均匀布设。
13.进一步地,所述刮刀组件b包括安装壳b和若干刮刀b;所述安装壳b靠近所述晶圆安装盘b的一侧为内凹的弧形,刮刀b均匀布设于该弧面上,且所述刮刀b的刀口正对于晶圆片的侧周面。
14.进一步地,所述清洗机构包括晶圆安装盘c、导轨c、导轨d、安装壳c、清洗液储存槽、清洗液喷嘴、海绵擦拭组件、无尘布擦拭组件;
15.所述晶圆安装盘c安装于安装平台上,所述导轨c安装于安装平台上;所述导轨d的一端通过连杆安装于所述导轨c上,且所述导轨c和导轨d呈垂直布设;所述安装壳c安装于所述导轨d上,且所述安装壳c可沿y向滑动式移动;
16.所述清洗液储存槽安装于所述安装壳c内;所述清洗液喷嘴的一端通过管路连接入所述清洗液储存槽内,所述清洗液喷嘴的另一端向下并位于所述晶圆安装盘c的上方;
17.所述安装壳c内安装有两个气缸;所述海绵擦拭组件、无尘布擦拭组件分别安装于气缸的活塞端头上。
18.进一步地,还包括可向下喷气的喷气嘴;所述喷气嘴安装于安装壳c内,且与所述清洗液喷嘴相邻。
19.进一步地,所述视觉检测机构包括晶圆安装盘d、导轨e、导轨f、视觉检测器、次品储存盒;
20.所述晶圆安装盘d安装于安装平台上,所述导轨e安装于安装架的顶面,所述导轨f可滑动式安装于所述导轨e上,所述导轨e和导轨f呈垂直布设;
21.所述视觉检测器通过连杆可滑动式安装于所述导轨f上,且所述视觉检测器正对于所述晶圆安装盘d的正上方;所述次品储存盒安装于所述晶圆安装盘d内,且邻近所述机械手的一侧为开口状。
22.与现有技术相比,本实用新型的有益效果是:
23.(1)本实用新型主要包括表面硬胶去除机构、侧面硬胶去除机构、清洗机构、视觉检测机构,可分别实现表面硬胶去除、侧面硬胶去除、清洗液清洗、视觉检测等功能,满足自动化生产的需求,生产效率较高;
24.(2)本实用新型先将固化后的晶圆片表面硬胶用刀片去除,再将晶圆片侧面硬胶用刀片去除,再采用定量清洗液进行喷洒后,先用海绵进行去胶擦拭、再用无尘布进行擦拭,最后再进行视觉拍照检测确认清洁效果及产品来料不良,每个工位机构均满足柔性生产的要求,对晶圆片不会有任何伤害,满足生产过程可控、破片风险较低的生产要求;
25.(3)在清洗液喷嘴喷洒清洗液的同时,借助喷气嘴喷出的气体,可快速分散清洗液,使得清洗液快速、均匀的布设于晶圆片上,提高清洗的效率;
26.(4)本实用新型结构合理,极具产业上的利用价值。
附图说明
27.图1为各清洗工位的布局图;
28.图2为表面硬胶去除机构的结构示意图;
29.图3为表面硬胶去除机构的刮刀a处的放大示意图;
30.图4为侧面硬胶去除机构的结构示意图;
31.图5为侧面硬胶去除机构的刮刀b处的放大示意图;
32.图6为清洗机构的结构示意图;
33.图7为清洗机构的海绵擦拭组件处的放大示意图;
34.图8为视觉检测机构的结构示意图;
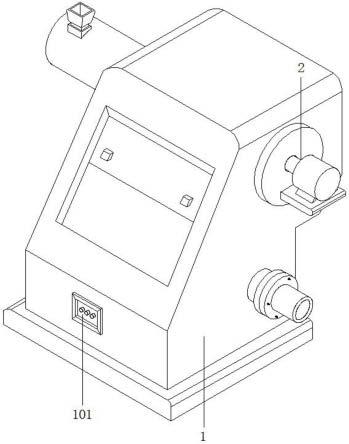
35.图9为本实用新型外形整体的结构示意图;
36.图中,1:表面硬胶去除机构,1-1:晶圆安装架a,1-2:刮刀组件a,1-3:滑轨a,1-4:刮刀a,2:侧面硬胶去除机构,2-1:滑轨b,2-2:刮刀组件b,2-3:晶圆安装盘b,2-4:刮刀b,3:清洗机构,3-1:晶圆安装盘c,3-2:导轨c,3-3:导轨d,3-4:海绵擦拭组件,3-5:清洗液喷嘴,3-6:喷气嘴,3-7:无尘布擦拭组件,4:视觉检测机构,4-1:晶圆安装盘d,4-2:导轨f,4-3:导轨e,4-4:视觉检测器。
具体实施方式
37.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
38.实施例1:请参阅图1-9,本实用新型提供一种技术方案:一种晶圆表面硬胶清洁自动化设备,包括安装架、进料储物盒、表面硬胶去除机构1、侧面硬胶去除机构2、用于清洗晶圆片的清洗机构3、用于检测晶圆片的视觉检测机构4、成品储物盒、机械手;
39.所述机械手安装于安装架的安装平台上;所述进料储物盒、表面硬胶去除机构1、侧面硬胶去除机构2、清洗机构3、视觉检测机构4、成品储物盒依次环绕所述机械手布局;
40.所述表面硬胶去除机构1包括刮刀组件a1-2、滑轨a1-3、晶圆安装架a1-1、驱动电机a;所述滑轨a1-3垂直安装于安装平台上,所述刮刀组件a1-2安装于所述滑轨a1-3上并可沿其轨道做上下滑移式运动;所述晶圆安装架a1-1安装于安装平台上,晶圆安装架a1-1的上表面安装有用于固定晶圆片的盘面a,且所述刮刀组件a1-2与盘面a成上下相对式布设;所述刮刀组件a1-2的底盘下表面安装有若干刮刀a1-4,且若干刮刀a1-4沿刮刀组件a1-2底盘下表面的中心均匀布设;所述驱动电机a安装于晶圆安装架a1-1的内部,且所述驱动电机a的驱动轴与盘面a的中心连接并可带动所述盘面a做水平转动式运动;待清洁晶圆片通过吸附的方式固定于所述盘面a;
41.所述侧面硬胶去除机构2包括刮刀组件b2-2、滑轨b2-1、晶圆安装盘b2-3、驱动电
机b;所述滑轨b2-1水平安装于安装平台上,所述刮刀组件b2-2安装于所述滑轨b2-1上并可沿其轨道做水平滑移式运动;所述晶圆安装盘b2-3安装于安装平台上,晶圆安装盘b2-3的上表面安装有用于固定晶圆片的盘面b,且所述刮刀组件b2-2布设于所述盘面b侧周;所述驱动电机b安装于晶圆安装盘b2-3的内部,且所述驱动电机b的驱动轴与盘面b的中心连接并可带动所述盘面b做水平转动式运动;待清洁晶圆片通过吸附的方式固定于所述盘面b上。其中,所述刮刀组件b2-2包括安装壳b和若干刮刀b2-4;所述安装壳b靠近所述晶圆安装盘b2-3的一侧为内凹的弧形,刮刀b2-4均匀布设于该弧面上,且所述刮刀b2-4的刀口正对于晶圆片的侧周面;
42.所述清洗机构3包括晶圆安装盘c3-1、导轨c3-2、导轨d3-3、安装壳c、清洗液储存槽、清洗液喷嘴3-5、可向下喷气的喷气嘴3-6、海绵擦拭组件3-4、无尘布擦拭组件3-7;所述晶圆安装盘c3-1安装于安装平台上;所述导轨c3-2安装于安装平台上;所述导轨d3-3的一端通过连杆安装于所述导轨c3-2上,且所述导轨c3-2和导轨d3-3呈垂直布设;所述安装壳c安装于所述导轨d3-3上,且所述安装壳c可沿导轨d3-3滑动式移动;所述清洗液储存槽安装于所述安装壳c内;所述清洗液喷嘴3-5的一端通过管路连接入所述清洗液储存槽内,所述清洗液喷嘴3-5的另一端向下并位于所述晶圆安装盘c3-1的上方;所述安装壳c内安装有两个气缸;所述海绵擦拭组件3-4、无尘布擦拭组件3-7分别安装于气缸的活塞端头上;所述喷气嘴3-6安装于安装壳c内,且与所述清洗液喷嘴3-5相邻;待清洁晶圆片通过吸附的方式固定于晶圆安装盘c3-1上;所述海绵擦拭组件3-4可以选用条状海绵,所述无尘布擦拭组件3-7可以选用多层无尘布;
43.所述视觉检测机构包括晶圆安装盘d4-1、导轨e4-3、导轨f4-2、视觉检测器4-4、次品储存盒;所述晶圆安装盘d4-1安装于安装平台上,所述导轨e4-3安装于安装架的顶面,所述导轨f4-2可滑动式安装于所述导轨e4-3上,所述导轨e4-3和导轨f4-2呈垂直布设;所述视觉检测器4-4通过连杆可滑动式安装于所述导轨f4-2上,且所述视觉检测器4-4正对于所述晶圆安装盘d4-1的正上方;所述次品储存盒安装于所述晶圆安装盘d4-1内,且邻近所述机械手的一侧为开口状;待清洁晶圆片通过吸附的方式固定于晶圆安装盘d4-1上;所述视觉检测器4-4可选用ccd检测相机;
44.所述机械手可携带晶圆片依次经过表面硬胶去除机构1、侧面硬胶去除机构2、清洗机构3、视觉检测机构4,并将处理后的晶圆片输送至储物盒内;
45.各部件的运作通过中控系统进行控制。
46.此外,所述刮刀b2-4的个数为3-6个,在刮除硬胶的同时,不会对晶圆片的运转产生较大的阻力,可得到较佳的刮除效果。
47.工作原理:
48.(1)操作人员将多片待清洁的晶圆片放置于进料储物盒中;
49.(2)启动该设备;
50.(3)机械手从进料储物盒中拿取晶圆片并放置于表面硬胶去除机构1中,表面硬胶去除机构1的清洁流程为:
51.①
晶圆片被吸附并固定于盘面a上;
52.②
驱动电机a带动盘面a做转动式运动;
53.③
刮刀组件a1-2沿着滑轨a1-3向下运动,并到达指定位置后,刮刀a1-4对晶圆片
表面的硬胶进行清理;
54.④
清理完毕后,驱动电机a停止运作、刮刀组件a1-2沿着滑轨a1-3向上运动并远离晶圆片,吸附力消失,晶圆片处于待移动状态;
55.(4)机械手从盘面a上拿取晶圆片并放置于侧面硬胶去除机构2上,侧面硬胶去除机构2的清洁流程为:
56.①
晶圆片被吸附并固定于盘面b上;
57.②
驱动电机b带动盘面b做转动式运动;
58.③
刮刀组件b2-2沿着滑轨b2-1向前运动,并到达指定位置后,刮刀b2-4对晶圆片侧面的硬胶进行清理;
59.④
清理完毕后,驱动电机b停止运作、刮刀组件b2-2沿着滑轨b2-1向后运动并远离晶圆片,吸附力消失,晶圆片处于待移动状态;
60.(5)机械手从盘面b拿取晶圆片并放置于清洗机构3上,清洗机构3的清洁流程为:
61.①
晶圆片被吸附并固定于清洗机构3上;
62.②
导轨c3-2和导轨d3-3运作;同时,清洗液喷嘴3-5按照一定的流量喷出清洗液、喷气嘴3-6喷出气体(可快速分散清洗液,使得清洗液快速、均匀的布设于晶圆片上);
63.③
海绵擦拭组件3-4在气缸的驱动下运动至擦拭位后,对喷洒了清洗液的晶圆片进行擦拭;
64.④
无尘布擦拭组件3-7在气缸的驱动下运动至擦拭位后,对海绵擦拭组件3-4擦拭后的晶圆片进行再次擦拭;
65.(6)机械手从清洗机构3上拿取晶圆片并放置于视觉检测机构4上,视觉检测机构4的清洁流程为:
66.①
晶圆片被吸附并固定于视觉检测机构4上;
67.②
导轨e4-3和导轨f4-2运作;同时,视觉检测器4-4对清洗后的晶圆片进行检查;
68.(7)如果晶圆片清洗后无异常,则机械手将其存放于成品储物盒内,否则,将其存放于次品储存盒内。
69.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下,可对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。