1.本实用新型涉及一种含有并联机构的微调机械手,尤其是涉及一种自动化砌墙机器人,属于自动化设备技术领域。
背景技术:
2.目前,随着社会进步,建筑行业蓬勃发展,在工程实际中砌墙工人是不可或缺的,为改善劳动工人的劳动环境,保障工人自身安全,降低能源损耗,创新发明设计一种具备高效率、高灵活性、高灵敏度的自动化砌砖作业机器人智能化装备,以此解放生产力,提高工作效率,降低企业生产成本。
3.现如今市面上的砌墙机器人基本上都是串联六自由度机械臂配合末端机械手来完成砌砖作业,会出现与实际工作环境不适用或放砖出现倾斜现象等问题,亟需一款能满足各种工作环境和砖块姿态调整的砌墙机器人,而并联机构恰恰具备姿态调整高精度性,高刚度,高稳定性等优点,在此模式下,砌墙机器人应运而生,并联微调机构辅以六自由度机械臂能有效解决现有砌墙机器人实际砌砖工作中砖块的调姿问题。
技术实现要素:
4.本实用新型的目的在于提供一种具有高环境适用性,能够实现精准送砖、末端精准调姿的砌墙机器人,实现此技术的核心内容是联合一种三自由度3ups-up的并联机构,结合六自由度机械臂和末端机械手,以及履带行走机构实现解决实际工作环境不适用或砌砖出现倾斜现象等问题。
5.本实用新型采用如下的技术方式实现:
6.一种用于砌砖作业的并联微调机械手,其特征在于:包括3ups-up并联微调机构和末端机械手两部分,所述3ups-up并联微调机构与末端机械手串联,服役工作时并联微调机构用于末端机械手精准调姿。
7.进一步的,所述3ups-up并联微调机构包括上静平台、下动平台、一条up被动支链和三条结构对称、各向同性的ups驱动支链,其中间up被动支链连接上下动静平台,上端与静平台采用虎克铰连接,下端与动平台采用移动滑轨连接,三条结构相同的ups驱动支链运动副铰点在上下平台呈等边三角形均匀分布,上端用虎克铰与静平台连接,下端用球窝式球面副与动平台连接。
8.所述三条结构对称、各向同性的ups驱动支链,包括虎克铰、驱动套筒、推杆、伺服驱动单元和球窝式球面副,虎克铰两个相交的轴线互相垂直,与静平台相连接的虎克铰轴线平行于静平台,虎克铰与驱动套筒相连接,套筒与推杆相互嵌套形成移动副,推杆与其下的球窝式球面副相连接,驱动源由伺服电机提供,构成ups驱动支链。
9.所述中间up被动支链,包括虎克铰、套筒、导轨、滑块和推杆,虎克铰两个相交的轴线互相垂直,与静平台相连接的虎克铰轴线平行于静平台,与之相接的虎克铰另一轴线平行于动平台,其下的移动副移动路线始终垂直于动平台。
10.所述末端机械手包括第一、第二、第三连杆,固定螺栓、抓持式夹板、滚珠丝杠、螺母副和驱动电机,两块抓持式夹板相互平行,滚珠丝杠一端与其中一块抓持式夹板用轴承连接,另一端穿过第二块抓持式夹板,抓持式夹板的中间开孔,且与滚珠丝杠形成螺旋副,滚珠丝杠伸出一侧通过联轴器与驱动电机相连,驱动电机上端与第三连杆固定,第一和第二连杆两侧末端开有滑槽,在两块抓持式夹板上部分第一、第二连杆中间呈x型连接,第三连杆只有一侧有滑槽,与抓持式夹板平面垂直连接,每条连杆都与抓持式夹板用固定螺栓连接。
11.本实用新型专利与现有技术相比,具有如下有益效果:(1)末端采用并联微调机构,使得砌墙机器人具有并联机构所具有的高精度、高响应速度、稳定性强、刚度大等特性;(2)采用三自由度并联微淘机构的优点在于配合六自由度机械臂能够实现高灵活度、大转角、强姿态能力、大工作空间等优势,能够适用于各种复杂工况砌砖作业。
附图说明
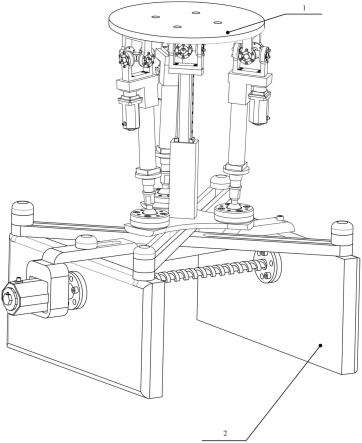
12.图1为本实用新型专利提供的一种用于砌砖作业的并联微调机械手整体结构示意图;
13.图2为本实用新型专利一种用于砌砖作业的并联微调机械手的3ups-up并联微调机构结构示意图;
14.图3为本实用新型专利一种用于砌砖作业的并联微调机械手的ups驱动支链结构示意图;
15.图4为本实用新型专利一种用于砌砖作业的并联微调机械手的up被动支链结构示意图;
16.图5为本实用新型专利一种用于砌砖作业的并联微调机械手的末端机械手结构示意图。
17.其中:
18.图1中:1.3ups-up并联微调机构;2.末端机械手;
19.图2中:10.上静平台;20.下动平台;30.ups驱动支链;40.up被动支链;
20.图3中:301.虎克铰;302.驱动套筒;303.推杆;304.伺服驱动单元;305.球窝式球面副;
21.图4中:401.虎克铰;402.套筒;403.推杆;
22.图5中:201.第一连杆;202.第二连杆;203.第三连杆;204.抓持式夹板;205.滚珠丝杠;206.驱动电机; 207.固定螺栓;
23.图6中:1.3ups-up并联微调机构;2.末端机械手;3.六自由度机械臂;4.履带行走机构。
具体实施方式
24.为进一步了解本实用新型专利提供的一种用于砌砖作业的并联微调机械手,下面结合附图和详细实施例对本实用新型进行具体阐述,本实用新型的内容不局限于实施例。
25.图1为本实用新型提供的一种应用于砌砖作业的并联微调机械手整体结构示意图,其包括3ups-up 并联微调机构1和末端机械手2两部分,所述3ups-up并联微调机构与末
端机械手串联,服役工作时并联微调机构用于末端机械手精准调姿。
26.图2为本实用新型提供的一种用于砌砖作业的并联微调机械手3ups-up并联微调机构,其包括上静平台10、下动平台20、一条up被动支链40和三条结构对称、各向同性的ups驱动支链30,中间up被动支链连接上下动静平台,上端与静平台采用虎克铰401连接,下端与动平台采用移动滑轨连接,三条结构相同的ups驱动支链30运动副铰点在上下平台呈等边三角形均匀分布,上端用虎克铰301与静平台10 连接,下端用球窝式球面副305与动平台20连接。
27.图3为一种用于砌砖作业的并联微调机械手ups驱动支链,其包括三条结构对称、各向同性的ups 驱动支链,包括虎克铰301、驱动套筒302、推杆303、伺服驱动单元304和球窝式球面副305,虎克铰301 两个相交的轴线互相垂直,与静平台相连接的虎克铰轴线平行于静平台,虎克铰与驱动套筒相连接,套筒与推杆相互嵌套形成移动副,推杆与其下的球窝式球面副相连接,驱动源由伺服电机提供,构成ups驱动支链。
28.图4为一种用于砌砖作业的并联微调机械手并联微调机构,其中间up被动支链,包括虎克铰401、套筒402、导轨、滑块和推杆403,虎克铰两个相交的轴线互相垂直,与静平台相连接的虎克铰轴线平行于静平台,与之相接的虎克铰另一轴线平行于动平台,其下的移动副移动路线始终垂直于动平台。
29.图5为一种用于砌砖作业的并联微调机械手的末端机械手,其包括第一201、第二202、第三连杆203,固定螺栓207、抓持式夹板204、滚珠丝杠205、螺母副和驱动电机206,两块抓持式夹板相互平行,滚珠丝杠一端与其中一块抓持式夹板用轴承连接,另一端穿过第二块抓持式夹板,抓持式夹板的中间开孔,且与滚珠丝杠形成螺旋副,滚珠丝杠伸出一侧通过联轴器与驱动电机相连,驱动电机上端与第三连杆固定,第一和第二连杆两侧末端开有滑槽,在两块抓持式夹板上部分第一、第二连杆中间呈x型连接,第三连杆只有一侧有滑槽,与抓持式夹板平面垂直连接,每条连杆都与抓持式夹板用固定螺栓连接。
30.图6为所述的本实用新型的具体实施例,包括3ups-up并联微调机构2、末端机械手1、六自由度机械臂3、履带行走机构4,并联微调机构静平台与六自由度机械臂末端用机械接口处的连接法兰相接,机械臂底座连接履带行走机构的承重台上,在实际工作当中,履带行走机构扩展了砌砖机器人的可工作环境范围,六自由度机械臂能够实现大范围位姿调整,而并联机构能够实现局部精细微动调整,实现精准放砖工作。
31.本实用新型专利所述的一种应用于砌砖作业的并联微调机械手的实施方式不局限于以上实施例所描述的实施例形式,根据本实用新型专利公开的内容,所属技术领域的技术人员还可以采取其他的具体方式进行实施,因此,实施例不能理解为本实用新型专利仅可以实施的具体实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。