技术特征:
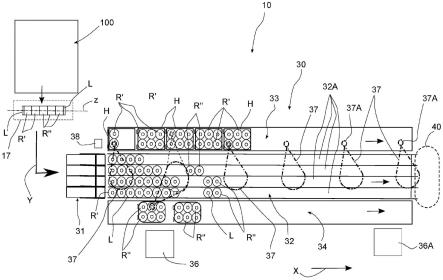
1.一种用于包装纸产品的包装机,包括:至少一个载体输送器,待包装的薄纸产品布置到所述至少一个载体输送器上;在载体输送器的旁边的至少一个侧区域,所述薄纸产品在所述至少一个侧区域处包装;至少一个机器人,其适于从所述至少一个载体输送器拾取薄纸产品并将薄纸产品放在所述至少一个侧区域中。2.根据权利要求1所述的包装机,其中,所述至少一个机器人是并联机器人,即,斯图尔特平台类型的机器人。3.根据权利要求1或2所述的包装机,包括多个所述机器人,其布置在所述至少一个载体输送器上方。4.根据前述权利要求中的一项或多项所述的包装机,其中,由所述包装机处理的产品为以下中的一种或多种:卫生纸卷、厨房用纸卷、餐巾纸、手帕纸、纸巾、卫生纸卷包装、或厨房用纸卷包装、或餐巾纸包装、手帕纸包装、或纸巾包装。5.根据前述权利要求中的一项或多项所述的包装机,其中,所述至少一个载体输送器具有平行于供给方向并适于接收平行的成行的产品的多个道。6.根据权利要求5所述的包装机,其中,所述至少一个载体输送器由多个输送器组成,所述多个输送器彼此邻近布置以限定所述道。7.根据前述权利要求中的一项或多项所述的包装机,其中,所述至少一个载体输送器适于传送纸卷形式的产品,并且限定了用于所述卷的平坦的面的搁置表面,即,所述卷布置成其中心轴线正交于所述载体输送器。8.根据前述权利要求中的一项或多项所述的包装机,其中,所述至少一个载体输送器适于传送纸卷形式的产品,并且包括用于设置卷直立使得所述卷的轴线处于竖向位置的装置,所述装置被布置在所述至少一个载体输送器的入口处。9.根据前述权利要求中的一项或多项所述的包装机,其中,所述至少一个侧包装区域包括平行于所述至少一个载体输送器的传送带。10.根据权利要求9所述的包装机,其中,所述传送带传送多个箱,所述至少一个机器人将所述纸产品放入所述多个箱中。11.根据前述权利要求中的一项或多项所述的包装机,其中,提供两个单独的侧包装区域,设置在所述至少一个载体输送器的相对两侧处。12.根据权利要求11所述的包装机,其中,所述两个单独的侧包装区域中的每一个都包括平行于所述至少一个载体输送器的传送带。13.根据权利要求12所述的包装机,其中,所述传送带传送多个箱,所述至少一个机器人将所述纸产品放入所述多个箱中。14.根据前述权利要求中的一项或多项所述的包装机,其中,所述至少一个包装区域的所述至少一个载体输送器和所述至少一个传送带能在相同的方向上或在相反的方向上运动。15.根据前述权利要求中的一项或多项所述的包装机,其中,所述至少一个侧包装区域包括用于多个箱的位置,所述至少一个机器人将所述纸产品放入所述用于多个箱中。16.根据前述权利要求中的一项或多项所述的包装机,其中,两个所述载体输送器平行
布置,在其之间提供所述至少一个侧包装区域。17.根据权利要求16所述的包装机,其中,所述至少一个侧包装区域包括布置在所述两个载体输送器之间并平行于所述两个载体输送器的传送带。18.根据前述权利要求中的一项或多项所述的包装机,其中,所述至少一个侧包装区域包括用于用包装膜包裹所述产品的至少一个包裹站点,或使用折叠以形成管的膜的类型的包装站点,或装袋站点。19.根据前述权利要求中的一项或多项所述的包装机,其中,产品聚集在所述至少一个侧包装区域中,所述产品一旦分组则朝向包装站点输送。20.根据前述权利要求中的一项或多项所述的包装机,适于在所述至少一个侧包装区域上形成成组的产品并处理所述成组的产品,以围绕所述组进行包装;通过将由所述至少一个机器人处理的产品定位在所述至少一个包装区域上或通过在所述至少一个包装区域上工作的至少一个分组装置来直接制造所述组。21.根据前述权利要求中的一项或多项所述的包装机,包括识别装置和管理电子程序,所述识别装置用于识别在所述至少一个载体输送器上移动的产品,适于识别和/或辨认产品在所述至少一个载体输送器上的位置,所述管理电子程序适于使用于所述机器人的控制器与由所述辨认装置识别的产品相关联,所述机器人用于拾取产品并使产品移向一个所述侧包装区域和/或在不合格产品和/或边料的情况下移向排出区域。22.根据权利要求21所述的包装机,其中,所述至少一个载体输送器适于传送不同类型的多种纸产品;其中,所述管理电子程序控制所述至少一个机器人,使得其将给定的多个不同产品放入所述至少一个包装区域,以制造由至少部分地彼此不同的纸产品形成的包装。23.根据前述权利要求中的一项或多项所述的包装机,其中,设置一个所述载体输送器,适于将待包装的产品传送到箱中,并且在其两侧处设置两条传送带,所述两条传送带相对于所述载体输送器在相反的方向上运动并且适于传送用于包装所述产品的箱,所述识别装置设置用于识别在所述载体输送器上运动的产品,适于识别和/或辨认产品在所述至少一个载体输送器上的位置,以及提供管理电子程序,适于将用于一个所述机器人的控制器与由所述识别装置识别的产品相关联,所述机器人用于拾取产品并使产品移向设置在所述传送带之一上的箱。24.根据前述权利要求中的一项或多项所述的包装机,包括辨认机构,用于辨认所述至少一个包装区域上的所述至少一个传送带上的所述箱,适于识别和/或辨认箱在所述至少一个传送带上的位置,并且通过电子程序以向所述机器人指示将所取产品放置在何处。25.根据前述权利要求中的一项或多项所述的包装机,其中,传送纸产品的所述至少一个载体输送器终止于另一包装区域,使得所述纸产品被连续地供给到所述至少一个载体输送器,即,没有被所述至少一个机器人放在所述侧包装区域,到所述至少一个另一包装区域上,优选的类型是包括包裹站点、和/或装袋站点、和/或形成塑料膜或纸膜的连续管的类型的包装站点,其中成组的产品进入,使得在管部分的端部处制造封闭接头,以形成袋。26.根据前述权利要求中的一项或多项所述的包装机,包括用于排出不合格产品和/或边料的排出区域。27.根据权利要求26所述的包装机,其中,用于排出所述不合格产品和/或边料的所述排出区域设置在所述至少一个载体输送器的端部处,使得所述不合格产品和/或边料由所
述至少一个机器人拾取并由所述载体输送器带向所述排出区域。28.根据权利要求21至26中的一项或多项所述的包装机,其中,所述识别装置包括至少一个摄像机,优选地布置在所述载体输送器上方,优选地对应于产品进入所述至少一个载体输送器的区域。29.根据权利要求21至27中的一项或多项所述的包装机,其中,所述识别装置包括光电池或光学传感器,所述光电池或光学传感器沿着所述至少一个载体输送器布置,并且适于验证卷的存在,使得通过所述至少一个机器人拾取所述卷。30.根据前述权利要求中的一项或多项所述的包装机,其中,所述至少一个机器人包括用于拾取和释放产品的操作构件。31.根据权利要求30所述的包装机,其中,用于拾取和释放产品的所述操作构件是具有钳口的铗钳,产品被保持在钳口之间,或者,如果产品是卷的形式,则所述操作构件是扩张类型的,适于插入卷的没有材料的中心孔内侧,并扩张而压抵孔的壁。32.根据权利要求30所述的包装机,其中,所述操作构件是吸盘类型的。33.一种用于将卷绕成母卷筒的纸层加工成纸产品的加工生产线,所述生产线包括前述权利要求中的一项或多项所述的包装机。34.根据权利要求33所述的加工生产线,包括用于加工不同薄纸产品的两个或更多个分支,其终止于共用的包装机,使得在所述包装机上能有不同类型的纸产品。35.根据权利要求33或34所述的加工生产线,包括用于通过加工卷绕成母卷筒的纸层来生产纸卷的分支,所述分支包括:拆卷机,其用于解绕至少一个母卷筒,纸层卷绕成所述至少一个母卷筒,复卷机,其适于通过卷绕从所述至少一个母卷筒解绕的至少一个纸层来生产副卷筒,所述副卷筒的直径基本等于待生产的卷的直径,一个或多个冲切机,其适于将所述副卷筒切割成纸卷。36.一种用于纸产品的包装的方法,包括以下步骤:从母卷筒开始,通过用于加工纸层的至少一个加工生产线生产纸产品,将最终甚至部分地预包装的所述产品移到至少一个载体输送器上,通过机器人将所述产品从所述至少一个载体输送器移到布置在所述载体输送器的旁边的所述至少一个侧包装区域;在所述至少一个包装区域上制作包含多个所述产品的包装。37.根据权利要求36所述的方法,其中,如果所述产品是纸卷,则所述产品在进入所述载体输送器之前,通过将其轴线从水平位置带到竖向位置而将其直立设置。38.根据权利要求36或37所述的方法,其中,所述机器人是并联机器人,优选为斯图尔特平台,或为开链型机器人,优选为scara机器人。39.根据权利要求36或38中的一项或多项所述的方法,识别沿着所述至少一个载体输送器移动的产品,并且使特定的识别的产品移到特定的包装区域。40.根据权利要求36至39中的一项或多项所述的方法,识别沿着所述至少一个载体输送器移动的至少两种类型的产品,并且使特定的识别的产品移到特定的包装区域,以便在同一包装机上制造:包含不同产品的相同包装,或
不同的包装,每个包装包含相同的产品,或包含相同产品的相同包装。41.根据权利要求36至40中的一项或多项所述的方法,沿着所述至少一个载体输送器传送且也由所述至少一个载体输送器的上游的生产产生的纸废料,并且将所述废料移到所述至少一个排出区域;优选地,如果产品是卷,则废料是副卷的边料,待包装的卷由所述副卷生产。42.根据权利要求41所述的方法,其中,所述废料沿着所述至少一个载体输送器移动直到其端部,由此在输送器的端部处优选地通过重力落入排出区域中。43.根据权利要求36至43中的一项或多项所述的方法,其中,在所述至少一个侧包装区域上提供至少一个顶部开口的箱,多个所述产品通过一个或多个所述机器人插入所述箱中;所述箱优选地适于平行于所述至少一个载体输送器运动。44.根据权利要求43所述的方法,其中,所述箱在一侧倾斜,使得产品能够通过重力朝向箱的一侧滑动。45.根据权利要求36至44中的一项或多项所述的方法,其中,所述至少一个侧包装区域被限定在平行于所述至少一个载体输送器运动的至少一个传送带上。46.根据权利要求36至45中的一项或多项所述的方法,其中,所述至少一个传送带相对于所述至少一个载体输送器的运动方向在相同的方向上或在相反的方向上运动。47.根据权利要求36至46中的一项或多项所述的方法,其中,在所述至少一个侧包装区域上,来自所述至少一个载体输送器的多个产品被一个或多个所述机器人包裹在膜中,从而制成卷包装。48.根据权利要求36至47中的一项或多项所述的方法,其中,特定的产品在所述至少一个侧包装区域上分组,然后被包装。49.根据权利要求36至48中的一项或多项所述的方法,其中,多个所述产品在所述至少一个侧包装区域上被装袋。50.根据权利要求36至49中的一项或多项所述的方法,其中,在一个所述载体输送器的两侧处提供两个侧包装区域。51.根据权利要求36至50中的一项或多项所述的方法,其中,提供两个载体输送器,并在其之间设置侧包装区域。52.根据权利要求45至51中的一项或多项所述的方法,其中,传送纸产品的所述至少一个载体输送器终止于另一包装区域,使得纸产品被连续地供给到所述至少一个载体输送器,到所述至少一个另一包装区域上,优选包括包裹站点、和/或装袋站点、和/或形成塑料膜或纸膜的连续管的类型的包装站点,成组的产品在该处进入,使得在管部分的端部处制作封闭接头以形成袋;优选地,提供在载体输送器上的第一纸产品由所述至少一个机器人拾取并放在至少一个传送带上,而留下第二纸产品在所述至少一个载体输送器上移向设置在所述至少一个载体输送器的端部处的另一包装站点,或者所述第二纸产品由所述至少一个机器人操作,以便方便地在所述至少一个载体输送器上分组,以供给到所述另一包装站点;优选能够根据具体需要选择是通过仅供应所述至少一个侧传送带,还是通过仅供应布置在所述至少一个载体输送器的端部处的另一包装站点来进行包装。
技术总结
用于纸卷的加工生产线,包括至少一个加工设备,其适于将卷绕成母卷筒的纸层加工成卷,包装机,其又包括:载体输送器,来自所述加工设备的卷布置在载体输送器上;在所述载体输送器的旁边的至少一个侧区域,所述卷在该处被包装;至少一个机器人,其适于从所述至少一个传送带拾取卷并将卷放入所述至少一个侧区域中。送带拾取卷并将卷放入所述至少一个侧区域中。送带拾取卷并将卷放入所述至少一个侧区域中。
技术研发人员:D
受保护的技术使用者:科尔伯纸巾股份公司
技术研发日:2020.09.17
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。