技术特征:
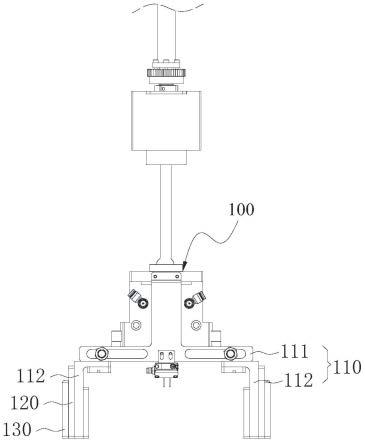
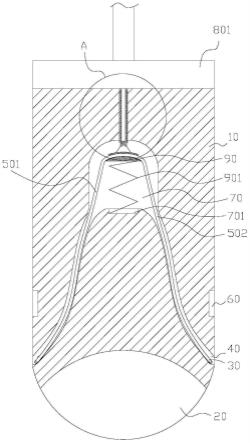
1.一种塔吊,包括塔体和转动设于所述塔体的顶端的转臂,其特征在于,还包括可升降地连接于所述转臂的端部的挂钩,所述挂钩包括能绕垂直于放置面的轴线转动的夹爪;所述夹爪包括主体和两个设于所述主体上且用于抓取物料的夹持部,两个所述夹持部能相对打开和夹紧;所述挂钩还包括两个滑动连接部,各所述滑动连接部能沿对应的所述夹持部的长度方向滑动,各所述滑动连接部的端部上均设置有用于承托所述物料的承托部,各所述承托部能相对对应的所述滑动连接部翻转。2.如权利要求1所述的塔吊,其特征在于,所述塔吊还包括:第一距离传感模块,用于检测所述夹持部的端部与放置面之间的距离是否为第一间距或第二距离;第一控制模块,用于控制夹爪的升降、转动和取放;第二控制模块,用于控制各滑动连接部相对对应的所述夹持部滑动;第二距离传感模块,用于检测所述夹爪是否能抓取所述物料;第三距离传感模块,用于检测所述夹爪是否位于所述物料在长度方向上的中间位置;第三控制模块,用于控制各承托部相对对应的所述滑动连接部翻转;其中,所述第一距离传感模块设于所述承托部上,第二距离传感模块设于所述夹持部上,所述第一控制模块设于所述主体上,所述第二控制模块设于所述滑动连接部上,所述第三控制模块所述承托部上。3.一种实现塔吊挂钩的自动抓取方法,其特征在于,应用于如权利要求2所述的塔吊,所述抓取方法包括下述步骤:通过第一距离传感模块检测到夹持部的端部与放置面之间具有第一间距时,通过第二距离传感模块检测夹爪是否能抓取物料;通过所述第二距离传感模块检测到所述夹爪无法抓取所述物料时,通过第一控制模块控制所述夹爪转动,以更换所述物料的抓取方位,以使所述夹爪能抓取所述物料;通过所述第一控制模块控制所述夹爪下降,以使部分所述物料能置于两个所述夹持部之间;通过第三距离传感模块检测到所述夹爪偏离所述物料的长度方向上的中间位置时,通过所述第一控制模块控制所述夹爪移动至所述物料在长度方向上的中间位置;通过所述第一控制模块控制两个所述夹持部夹持于所述物料并使所述夹爪上升,使所述夹持部的端部与所述放置面之间具有第二间距;通过所述第一距离传感模块检测到所述夹持部的端部与所述放置面之间具有所述第二间距时,通过第二控制模块控制滑动连接部滑动以及通过第三控制模块控制承托部翻转,以使所述承托部能承托于所述物料的底部。4.如权利要求3所述的抓取方法,其特征在于,所述通过第一距离传感模块检测到夹持部的端部与放置面之间具有第一间距时,通过第二距离传感模块检测夹爪是否能抓取物料的步骤具体包括:通过所述第二距离传感模块检测两个所述夹持部对应的所述物料的两个被夹持面之间的间距;判断两个所述被夹持面之间的间距是否小于两个所述夹持部之间的最大间距。
5.如权利要求3所述的抓取方法,其特征在于,所述通过所述第二距离传感模块检测到所述夹爪无法抓取所述物料时,通过第一控制模块控制所述夹爪转动,以更换所述物料的抓取方位,以使所述夹爪能抓取所述物料的步骤具体包括:通过所述第二距离传感模块检测两个所述夹持部之间的最大间距小于所述物料的两个被夹持面之间的间距时,通过第一控制模块控制所述夹爪转动,以更换所述物料的两个所述被夹持面,以使两个所述夹持部之间的最大间距大于更换后的两个所述被夹持面之间的间距。6.如权利要求3所述的抓取方法,其特征在于,所述通过所述第一控制模块控制所述夹爪下降,以使部分所述物料能置于两个所述夹持部之间的步骤具体包括:通过所述第一控制模块控制所述夹爪以第一速度下降,以使所述物料的顶部与所述主体相抵接,且部分所述物料位于两个所述夹持部之间。7.如权利要求3所述的抓取方法,其特征在于,所述通过第三距离传感模块检测到所述夹爪偏离所述物料的长度方向上的中间位置时,通过所述第一控制模块控制所述夹爪移动至所述物料在长度方向上的中间位置的步骤具体包括:根据所述物料的长度l计算所述物料在长度方向上的中间位置的范围值;通过第三距离传感模块检测到所述夹爪位于所述物料的长度方向上的位置;判断所述夹爪位于所述物料的长度方向上的位置是否处于所述物料在长度方向上的中间位置的范围值内;若所述夹爪位于所述物料的长度方向上的位置不处于所述物料在长度方向上的中间位置的范围值内,通过所述第一控制模块控制所述夹爪移动至所述物料在长度方向上的中间位置的范围值内。8.如权利要求7所述的抓取方法,其特征在于,所述根据所述物料的长度l计算所述物料在长度方向上的中间位置的范围值的步骤具体包括:所述中间位置的范围值的计算公式为:(l/2)
±
l*20%其中,l为物料的长度。9.如权利要求3所述的抓取方法,其特征在于,所述通过所述第一控制模块控制两个所述夹持部夹持于所述物料并使所述夹爪上升,以使所述夹持部的端部与所述放置面之间具有第二间距的步骤具体包括:通过所述第一控制模块控制两个所述夹持部夹紧,以使所述夹爪抓取所述物料;通过所述第一控制模块控制所述夹爪以第二速度上升,使所述夹持部的端部与所述放置面之间具有所述第二间距。10.如权利要求3所述的抓取方法,其特征在于,通过所述第一距离传感模块检测到所述夹持部的端部与所述放置面之间具有所述第二间距时,通过第二控制模块控制滑动连接部滑动以及通过第三控制模块控制承托部翻转,以使所述承托部能承托于所述物料的底部的步骤具体包括:通过所述第二控制模块控制所述滑动连接部滑动,以使所述滑动连接部的端部朝向所述物料的底部伸出;通过所述第三控制模块控制各所述承托部相对对应的所述滑动连接部翻转,以使所述
承托部翻至所述物料的底部下方,且两个所述承托部与所述物料的底部之间均具有间隙;通过所述第二控制模块控制各所述滑动连接部相对对应的所述夹持部滑动,以使两个所述承托部均与所述物料的底部接触,且所述承托部对所述物料作用有预设力度的承托力。11.如权利要求3所述的抓取方法,其特征在于,在通过所述第一距离传感模块检测到所述夹持部的端部与所述放置面之间具有所述第二间距时,通过第二控制模块控制滑动连接部滑动以及通过第三控制模块控制承托部翻转,以使所述承托部能承托于所述物料的底部之后,还包括:控制所述夹爪以第三速度上升,以使所述物料远离所述放置面。12.如权利要求11所述的抓取方法,其特征在于,所述控制所述夹爪以所述第三速度上升,以使所述物料远离所述放置面的步骤具体包括:在抓取有所述物料的所述夹爪以第三速度上升的过程中,检测到所述物料的底部与两个所述承托部之间存在相对位移,根据所述相对位移增大两个所述承托部承托所述物料的力度,直至所述物料与两个所述承托部之间相对位移消除。
技术总结
本发明适用于塔吊抓取技术领域,提供了一种塔吊及实现塔吊挂钩的自动抓取方法。种塔吊包括塔体、转臂和挂钩,挂钩包括能绕垂直于放置面的轴线转动的夹爪;夹爪包括主体和两个夹持部,两个夹持部能相对打开和夹紧;挂钩还包括两个滑动连接部,各滑动连接部能沿对应的夹持部的长度方向滑动,各滑动连接部的端部上均设置有承托部,各承托部能相对对应的滑动连接部翻转。本发明提供的塔吊及实现塔吊挂钩的自动抓取方法,能有效杜绝在吊运过程中,因物料体积较大、重量较大而从挂钩上滑落下来的安全隐患,提高了塔吊工作的安全性;并且,能使挂钩的承托机构根据不同物料的体积、重量对物料起到承托作用,提高了挂钩抓取物料的精准度与效率。率。率。
技术研发人员:陈德木 蒋云 赵晓东 陆建江 陈曦
受保护的技术使用者:杭州大杰智能传动科技有限公司
技术研发日:2022.01.24
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。