1.本发明属于排放测试领域,具体涉及一种基于卷积受限玻尔兹曼机的二维重建方法。
背景技术:
2.可调谐激光吸收光谱技术(tdlas)是一种成熟的气体测量技术,特别是用于温度和浓度的测量。但其本质上是视线,限制了其在空间不均匀的气体测量中的应用。随着医学扫描断层成像技术的发展,扫描系统和图像重建得到了快速发展。为了测量复杂燃烧流场的二维分布情况,美国华盛顿大学的p.j.emmerman首次提出将计算机断层成像(computed tomography,ct)技术与tdlas技术相结合,测量了甲烷浓度的二维分布。这项技术经过发展目前已广泛应用到燃烧诊断领域,同时也有许多重建算法被研究人员应用到重建过程中:常用的有以代数迭代重建算法(art)为基础的一系列改进算法;以radon变换为基础的滤波反投影算法;tiknonov正则化算法;模拟退火(sa)算法等。应用这些算法在重建过程中,要想得到高质量的重建图像,需要通过增加光线的投影数目实现,不仅使得系统的复杂性和成本进一步升高,还将导致重建时间的增加,难以实现在线测量。同时对于模拟退火(sa)算法这种全局优化算法,虽然其保持了较高的重建精度,但也因为计算效率较低而无法实现实时测量。
3.基于能量模型的受限玻尔兹曼机rbm(restricted boltzmann machine)以其简单的人工神经网络形式和快速的学习算法,已经广泛应用于数据降维、语音识别和图像处理等多个机器学习领域,其中rbm具有两层结构,即隐藏层和可视层,它用隐藏层单元对可视层单元的分布进行建模,层内无连接,层间全连接。honglak lee等人提出了一种卷积受限玻尔兹曼机crbm(convolutional restricted boltzmann machine)模型。crbm是一种将cnn模型与rbm模型相结合的具有平移不变性的层次化生成模型,支持自顶向下和自底向上的概率推理,并且采用概率最大池进行降维和正则化操作,其模型的设计考虑了图像的二维结构,并且有效地使用卷积核。crbm在医学图像处理领域已表现出十分优秀的性能。
技术实现要素:
4.本发明其中一个发明目的在于提供一种基于卷积受限玻尔兹曼机的二维重建方法,以解决现有方法重建精度对于投影光线数目的依赖,同时在保持较高重建精度的同时提高计算效率,减少重建时间。
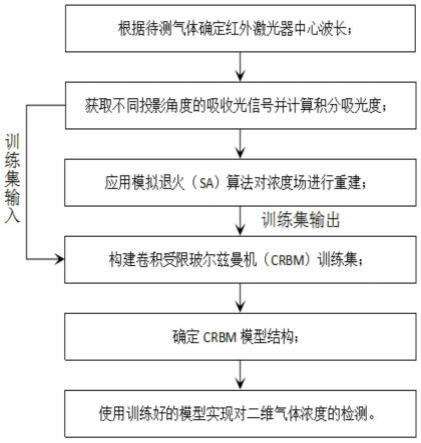
5.为实现上述目的,本发明采用以下技术方案,一种基于卷积受限玻尔兹曼机的二维重建方法方法,包括以下步骤:
6.步骤1,根据目标探测气体进行谱线遴选确定红外激光器中心波长;利用hitran数据库,针对待测气体,选取4条符合条件的吸收谱线。其中选取多条谱线是为了便于使用模拟退火算法构建目标优化函数。
7.步骤2,获取不同投影角度的红外激光吸收信号并计算得到积分吸光度;将待测区
域离散成m
×
n个测量网络,并由m
×
n条正交布置的红外激光光路均匀穿过待测区域进行测量。由于采用了时分复用技术,正交光路中每束红外激光都包含步骤1所选4种波长红外激光的光谱吸收率信息。计算积分吸光度时采用voigt线型函数。
8.步骤3,应用模拟退火(sa)算法对浓度场进行重建;将测量得到的积分吸光度分布定义为pm(lj,λi),根据假设的气体浓度分布计算得到的值定义为pc(lj,λi),定义理想化的目标优化函数为式中i,j分别为波长和光束序号。加入平滑度用来改善目标病态问题的求解,定义平滑度定义平滑系数为γ
t
,γ
p
,待优化目标函数可表述为f(t,p)=da(tx) γ
trt
(t) γ
prp
(p)。完成目标函数构建进而重建出浓度场。
9.步骤4,构建卷积受限玻尔兹曼机(crbm)训练集;通过改变待测气体浓度分布,可得到不同的积分吸光度,重复以上工作,得到若干组数据,根据生成的数据作为训练集训练神经网络。步骤2计算得到的积分吸光度作为训练集的输入x,以模拟退火算法重建结果作为训练集的输出y,共采用15000组样本进行网络训练,根据网络的输出结果对网络进行参数调整;
10.步骤5,确定crbm模型结构;卷积受限玻尔兹曼机crbm模型在结构上只有两层,即输入层v和隐层h,隐层可以有多个卷积核。crbm模型是概率生成模型。通过模型的能量函数得到模型所表达的数据的联合概率分布,能够从模型中生成符合该分布的样本。定义能量函数
11.其中是模型参数。
12.用定义的符号表示能量函数为:
13.得到模型的联合概率分布:
14.由联合概率分布可以得到条件概率分布:由联合概率分布可以得到条件概率分布:其中为sigmoid函数。
15.进一步的crbm模型通过训练确定模型的参数θ,以拟合给定的训练样本,即由该参数确定的crbm模型表达训练样本的概率分布,crbm的训练方法采用对比散度算法对crbm进行训练,以训练集中的样本作为模型的初始值。记训练集样本x={x0,x1,...,xm},模型初始值记为v0,用训练样本初始化模型可视层单元的状态,即令v0=x0,执行多步gibbis采样。首先是上采样,根据公式计算隐层单元的激活概率,确定隐单元
的状态,即由p(h|v)求得h;然后由上采样得到的h,根据公式进行下采样,重构可视层单元的状态,即由p(v|h)求得v1。不断重复上述的上采样、下采样,如此经过k步采样,得到x0对应的采样结果vk。使用梯度下降法更新crbm模型参数θ,因此基于cd算法的参数θ的梯度更新公式为:k取值为1,即采用cd-1对crbm进行训练
16.步骤6,使用训练好的模型实现对二维气体浓度的检测。优化后的crbm有两个卷积层,分别具有8、16个卷积核,卷积核的大小为2
×
2,部长均为1;在第一个卷积层后连接一个下采样层,下采样层大小为2
×
2,步长为1;完全连接后输出浓度分布(m
×
n)
×
1的列,对其进行重排维数,可得到m
×
n的浓度矩阵。
17.本发明所述的基于卷积受限玻尔兹曼机和tdlas的二维重建方法具有以下有益效果:
18.1.本发明所使用的crbm模型对噪声不敏感,在噪声干扰下,依旧能够完整且准确地反演重建出二维浓度场。
19.2.本发明相比于原有的模拟退火算法,在完成网络训练后,能够迅速、准确的重建出火焰场的形貌结构,无需构建及改善目标优化函数。
20.3.本发明的训练集由实测数据经模拟退火算法重建获得,相较于通常作为训练集的高斯分布随机二维浓度场,本发明得到的重建结果更接近真实情况。
附图说明
21.图1为本发明的基于卷积受限玻尔兹曼机和tdlas的二维重建方法的流程框图。
22.图2为本发明的crbm结构示意图。
具体实施方式
23.下面结合附图与具体实施方式对本发明作进一步详细描述。
24.本实施例测量对象为平焰炉,针对h2o分子选取7185.6,7444.3,6807.8和7466.3cm-1这4条吸收谱线,采用时分复用使得每条测量光路都包含这4条吸收谱线信息。光路设置为8
×
8正交网格排布,共有两个方向的投影,分别为0
°
和90
°
,共有16次视线测量。测量数据经计算可得到4组积分吸光度a
λ1
,a
λ2
,a
λ3
,a
λ4
。应用模拟退火算法构建目标优化函数完成对h2o二维浓度场的重建,得到浓度场s为一个8
×
8的矩阵。
25.改变平焰炉的工作状态重复上述过程得到多组测量数据用以构建训练集。在没有路线测量的部分假设为真空状态,即积分吸光度为零,得到4个积分吸光度矩阵的维数为1
×
20。将4个矩阵合并作为训练集的输入x=[a
λ1
,a
λ2
,a
λ3
,a
λ4
]
t
,以模拟退火算法重建结果作为训练集的输出y=s。最终生成训练集包含用于网络训练的15000个样本。
[0026]
确定神经网络模型。用得到的训练集进行训练,通过调参改进重建效果,最后用跨度较大的测试集进行测试,再进行评价和调参,直至重建误差满足要求,从而确定神经网络
模型如图2所示。优化后的crbm有两个卷积层,分别具有8、16个卷积核,卷积核的大小为2
×
2,部长均为1;在第一个卷积层后连接一个下采样层,下采样层大小为2
×
2,步长为1;在第二个卷积层后是全连接层,完全连接后输出浓度分布(8
×
8)
×
1的列,对其进行重排维数,可得到8
×
8的浓度矩阵。
[0027]
完成crbn的训练后将不再需要sa重建过程,只需对光谱吸收信号进行采集,将采集到的16个方向的投影数据输入crbm即可得到浓度场的监测结果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。