1.本发明提供了一种基于纵横向快速解耦控制和最优机动突防策略的高马赫飞行器机动突防策略设计方法,属于航空航天技术领域。
背景技术:
2.近年来,随着各军事大国不断发展升级拦截系统并逐渐建立起完备且多层次的导弹防御系统,防御体系逐渐趋于体系化、全球化、智能化,传统飞行器将很难实现对既定目标的突防打击。当前,作战空域包括末段高低层、中段大气层外甚至助推段等,拦截方式包括动能碰撞式、破片杀伤式和定向能等多种方式,拦截目标包括传统弹道导弹、巡航导弹等。高马赫飞行器一般指飞行速度大于5马赫,采用滑翔或者以吸气式发动机为动力等方式的新型飞行器。高马赫飞行器由于自身速度较高以及采用机动后不容易被弹道预报,具有突破当今世界上已知的反导拦截系统的潜力,已经成为世界各国的研究热点。
3.高马赫飞行器一般在临近空间中高速飞行,由于临近空间飞行环境较为恶劣,为了保证飞行器的稳定安全,需要严格保证热流密度、过载和动压等满足约束条件。同时,为了应对日益发展完备的导弹防御体系在攻防对抗中实现机动突防,还需要在满足约束的条件下实时生成能够满足脱靶量最大等性能指标的机动突防制导指令。因此,需要研究适合高马赫飞行器的机动突防策略以提升突防能力。
4.何磊等人针对突防中新的难题,基于虚拟滑动目标的自适应比例导引设计了高马赫飞行器螺旋俯冲机动突防策略。李静琳等人针对高马赫飞行器末段突防和精确打击问题,提出一种基于伪谱法并考虑拦截弹模型的机动突防轨迹优化方法。王亚帆等人基于拦截弹高阶线性制导系统的状态空间模型的脱靶量级数解析解公式研究了目标最优机动策略及影响因素。 tetsuya takehira等人与zarchan p等人分别研究了摆动式机动突防策略对拦截器的突防效果。 fumiaki imado等人研究了二拦一的问题,提出一种目标在突防两枚导弹时脱靶量最大的最优控制问题的求解方法,说明了弹目距离与规避机动次数的关系。不过高马赫飞行器机动突防策略的设计需要综合考虑机动过载、动力、气动等多种因素,上面的研究缺少更精细的模型,难以满足实际需要。
技术实现要素:
5.针对高马赫飞行器机动突防问题,本发明基于纵横向解耦的反馈线性化控制与基于线性制导系统模型的最优机动策略设计了可以满足高马赫飞行器高度、速度、过载、航程等多种要求的机动突防策略,相比传统突防方式,可以显著提升突防效能。
6.本发明为一种高马赫飞行器机动突防策略设计方法,其特征在于:它包括以下几个步骤:
7.步骤一:高马赫飞行器动力学和运动学建模:
8.因为机动突防策略只需要关注飞行器的弹道特性,所以忽略地球选择模型和飞行器自身控制系统动态特性以简化设计过程。因此高马赫飞行器在平面大地假设下的三自由
度质点动力学运动学模型如下:
[0009][0010][0011][0012][0013][0014][0015]
其中,x,y,z为平面大地位置坐标,x轴方向指向北,y轴方向指向上,z轴方向由右手法则决定,v为高马赫飞行器相对地球的速度,γ为相对速度与平面大地之间的航迹角,ψ为相对速度与正北方位之间的航向角,α为飞行器的攻角,σ为飞行器的侧倾角,g=μ/r2是重力加速度,μ为地球重力加速度常数,t为推力,升力l和阻力d的计算公式如下:
[0016][0017][0018]
其中,q=ρv2/2是飞行过程中的动压,c
l
是升力系数,cd是阻力系数,s
ref
是飞行器的参考面积,m为飞行器质量,ρ为大气密度,大气密度通过标准大气模型给定。
[0019]
步骤二:运用反馈线性化控制方法求解纵向制导指令:
[0020]
纵向制导律设计的目的为使飞行器在动力作用下,能够起飞、降落并维持等高等速的飞行状态,下面将分别对等弹道倾角、等高与等速飞行设计相应的制导律,保证飞行器能够稳定的保持等高等速飞行状态。
[0021]
从式(2),高度的动力学方程只与速度和弹道倾角有关,与控制量(推力、攻角和倾侧角)无关,而高度取二次导数后会出现控制量,因此假设巡航高度为rr并且将高度误差的变化规律设计为二阶环节,将速度与弹道倾角的动力学方程(4)、(5)带入到式(2)的二阶导数表达式,然后结合误差动力学方程就可以得到如下所示的反馈形式的控制律
[0022][0023]
其中,r为飞行高度,rr为期望巡航飞行高度,ξ为典型的阻尼系数,一般选取为0.707 具有较好的动态品质,为高度误差的2阶环节的自然振动频率,直接影响到高度变化的动态品质。如果控制量能满足上述关系,那么飞行器在高度方向上的误差将呈指数形式递减,最后收敛到零,从而保持等高飞行。
[0024]
从式(4),与高度不同,速度的动力学方程与控制量(推力、攻角和倾侧角)有关,因此假设巡航速度为vr并且将速度误差累计项的变化规律设计为二阶环节,将速度的动力学
方程(4)带入速度误差累计项动力学方程就可以得到如下所示的反馈制导律
[0025][0026]
其中,v为飞行速度,vr为期望巡航飞行速度,ξ同样为典型的阻尼系数,选取为0.707,ωn为速度误差的2阶环节的自然振动频率,直接影响到速度变化的动态品质。如果控制量能满足上述关系,那么飞行器在速度上的误差将逐渐收敛到零,从而保持等速飞行。
[0027]
从式(5),与速度相同,弹道倾角的动力学方程也与控制量(推力、攻角和倾侧角)相关,因此假设需要的弹道倾角为γr并且将弹道倾角误差累计项的变化规律设计为二阶环节,将弹道倾角的动力学方程(5)带入弹道倾角误差累计项动力学方程就可以得到如下所示的反馈制导律
[0028][0029]
其中,γ为弹道倾角,γr为期望弹道倾角,ξ同样为典型的阻尼系数,一般选取为0.707,ω
γ
为弹道倾角误差的2阶环节的自然振动频率,直接影响到弹道倾角变化的动态品质。当所作用的控制量满足上式关系,则飞行器的弹道倾角将跟踪上所需的弹道倾角,保持等弹道倾角的飞行状态,从而实现稳定的爬升与降落。
[0030]
步骤三:纵横向快速解耦解算飞行控制量:
[0031]
飞行器在保证等高等速飞行的同时,横向平面也存在过载指令,横向加速度主要由倾侧角产生。当存在倾侧角时,升力就会在横向平面产生分量,从而实现横向加速度。通过设计巡航轨迹获得所需的横向过载后,就可以通过下式表示为控制量(推力、攻角和倾侧角)的表示形式。
[0032][0033]
其中n是需要的过载,综合以上情况,高度控制、速度控制和横向过载控制组成了一组方程,由于方程较长,可以简化成
[0034][0035]
其中a1,a2,a3,c1,c2,c3为公式记号,代表的内容如下所示,将式(14)代入式(13),即为控制方程:
[0036][0037]
通过观察发现,倾侧角只与式(13)中第一个方程和第三个方程有关。因此,将式(13) 中第一个方程和第三个方程联立求解,获得倾侧角的解析求解公式
[0038][0039]
由于控制量推力t在两个方程中都只出现过一次,可以消除t,从而得到只有一个参数的非线性方程,采用牛顿法就可以快速的获得所需的攻角值。其方程如下:
[0040]
f(α)=a1cosσ(c
2-a2d(α))tanα-(c
1-l(α)a1cosσ)a2=0
ꢀꢀꢀ
(16)
[0041]
因为攻角的变化范围比较小且主要集中在零度附近,那么推力大小将通过如下公式获得
[0042][0043]
步骤四:飞行器机动突防策略设计:
[0044]
高马赫飞行器保持一定的速度和高度接近目标和防御阵地一定距离后,先采取0.5g~1g 的机动过载进行长时间的蛇形机动或者方波机动,尽可能在拦截系统模型在进入末制导阶段前进行突防。如果拦截系统模型对高马赫飞行器的拦截过程进入了末制导,此时时间较短,飞行器就采用尽可能大的过载机动突防,但是由步骤三可知,推力作为控制量的调节范围是有限的,最大推力情况下能够实现的过载可以通过求解步骤三中的方程获得。因为不能无限大的增加机动过载,所以就需要对机动突防策略进行设计,以提高突防能力。
[0045]
对高马赫飞行器采用步骤一所述模型进行建模,并采用步骤二三所述方法进行解耦并解算制导指令,那么由高马赫飞行器自身推力和气动系数等就可以决定进行机动时的过载指令的大小,最优机动突防策略需要设计的就是飞行器机动的方向。
[0046]
因此对于目标最优机动突防问题的求解,可以转换为一个时变、末段状态自由、控制受约束、性能指标为末值型的最优控制问题,并能够采取极值原理求解。
[0047]
对于拦截弹的高阶线性制导系统可以表示为如下的状态空间形式
[0048]
[0049]
y(t)=c(t)x(t)
ꢀꢀꢀ
(19)
[0050]
x(0)=0,t∈[0,tf]
ꢀꢀꢀ
(20)
[0051]
式中,x(t)是状态向量;u(t)是控制输入变量;y(t)是输出变量;a(t)、b(t)和c(t)是线性系统的系数矩阵,tf为终止时刻。
[0052]
当输入为脉冲函数时,式(18)所示系统的伴随系统可以等价于如下线性系统
[0053][0054][0055]
w(t)=zu(t)
ꢀꢀꢀ
(23)
[0056]
其中,z(t)和zu(t)时伴随系统的状态变量;w(t)是伴随系统的输出变量。
[0057]
对于上面的拦截弹末段高阶线性系统模型,为了让拦截弹脱靶量最大,性能泛函j取为
[0058]
minj=-y(tf)=-c(tf)x(tf)
ꢀꢀꢀ
(24)
[0059]
且满足约束
[0060][0061]
|u(t)|≤1
ꢀꢀꢀ
(26)
[0062]
由极值原理,最优机动控制的形式为
[0063][0064]
其中sgn()为符号函数,w(t)是伴随系统的输出变量,而伴随系统的输出变量就是系统的脱靶量。即对于高阶线性制导系统,最优机动突防控制切换函数的表达式正是目标阶跃机动的脱靶量导数的符号的相反数,求解脱靶量导数的符号,就可以直接确定最优机动加速度的控制符号,并获取最优控制切换时刻。而对于确定的高阶线性制导系统,通过伴随法容易求出其脱靶量随剩余飞行时间的变化趋势,从而获得突防目标能够使拦截弹脱靶量最大的机动突防方式。
[0065]
通过上述四个步骤,本发明设计了一种可以满足高马赫飞行器高度、速度、机动过载等多种要求的机动突防策略及其制导控制方法。
[0066]
本发明的优点在于:
[0067]
(1)利用反馈线性化控制实现高马赫飞行器等高等速运动并且通过纵横向解耦快速计算指定约束下的控制指令,可以实现制导指令的在线快速生成;
[0068]
(2)通过对拦截系统制导模型的伴随分析获取高马赫飞行器最优机动突防方向的切换时刻,再使对拦截系统脱靶量最大的同时减少切换次数和最大过载机动时间,可以有效节约燃料,保证航程。
附图说明
[0069]
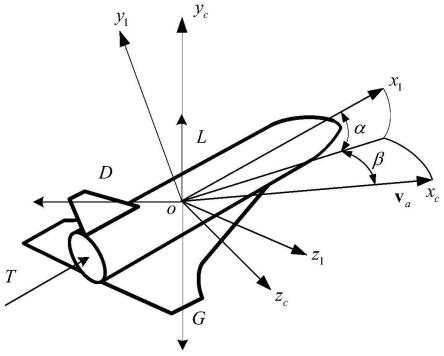
图1是高马赫飞行器动力学和运动学建模示意图。
[0070]
图2是制导控制系统示意图。
[0071]
图3是无横向机动的全程仿真飞行轨迹。
[0072]
图4是存在返程并有横向机动的全程仿真飞行轨迹。
[0073]
图5是高马赫飞行器全程机动突防策略示意图。
[0074]
图6是五阶制导系统脱靶量伴随分析仿真结果。
[0075]
图7是不同机动策略脱靶量幅值伴随分析仿真结果。
具体实施方式
[0076]
下面将结合附图和实施案例对本发明作进一步的详细说明。
[0077]
本发明为一种高马赫飞行器机动突防策略设计方法,能够实现对高马赫飞行器的建模和制导控制,并能在与拦截系统的对抗中脱靶量最大,具体实施包括以下几个步骤:
[0078]
步骤一:高马赫飞行器动力学和运动学建模:
[0079]
研究高马赫飞行器的突防策略,首先要描述其动力学和运动学系统。不考虑阻力的情况下,高马赫飞行器所受到的外力主要是气动力、推力和重力,其中气动力主要表示在速度坐标系中,推力表示在本体坐标系中,重力表示在地面坐标系中。然后对外力进行坐标系转换并且将动力学微分方程建立在弹道坐标系中、运动学微分方程建立在地面坐标系下,就可以描述高马赫飞行器的运动学和动力学模型。因为机动突防策略只需要关注飞行器的弹道特性,所以忽略地球选择模型和飞行器自身控制系统动态特性以简化设计过程。因此高马赫飞行器在平面大地假设下的三自由度质点动力学运动学模型如下:
[0080][0081][0082][0083][0084][0085][0086]
建模示意图如图1所示,其中,所有的微分方程都是对时间的导数,x,y,z为平面大地位置坐标,x轴方向指向北,y轴方向指向上,z轴方向由右手法则决定,ox1y1z1为飞行器本体坐标系,oxcyczc为飞行器速度坐标系,v为高马赫飞行器相对地球的速度,γ为相对速度与平面大地之间的航迹角也称弹道倾角,ψ为相对速度与正北方位之间的航向角也称弹道偏角,α为飞行器的攻角,σ表示飞行器沿速度方向旋转的角度称为飞行器的侧倾角,g=μ/r2是重力加速度,μ为地球重力加速度常数,t为推力,升力l和阻力d的计算公式如下:
[0087][0088][0089]
其中,q=ρv2/2是飞行过程中的动压,c
l
是升力系数,cd是阻力系数,s
ref
是飞行器的参考面积,m为飞行器质量,ρ为大气密度,大气密度通过标准大气模型给定。
[0090]
步骤二:运用反馈线性化控制方法求解纵向制导指令:
[0091]
高马赫飞行器的飞行状态包括巡航飞行和起飞降落飞行。巡航飞行指飞行器在推
力的作用下以稳定的高度和速度长时间飞行,同时纵向制导律需要保证飞行器在存在一定的干扰的情况下,维持巡航飞行状态。起飞飞行需要在推力的作用下保持指定的弹道倾角上升到一定的高度,而降落飞行是推力为0的情况下保持指定的弹道倾角下降。
[0092]
纵向制导律设计的目的为使飞行器在动力作用下,能够起飞、降落并维持等高等速的飞行状态,下面将分别对等弹道倾角、等高与等速飞行设计相应的制导律,保证飞行器能够稳定的保持等高等速飞行状态以及起飞降落。
[0093]
首先是等高飞行的控制方案设计,从运动学微分方程(2)可以看出,高度的动力学方程只与速度和弹道倾角有关,与控制量(推力、攻角和倾侧角)无关,而高度的二次导数则与控制量直接相关,因此,可以设计基于高度误差的反馈控制律,保证飞行器跟踪上标准的巡航高度。假设,巡航高度为rr,其导数与二次导数如下式所述。
[0094][0095]
飞行器的实际高度r、高度的导数以及二次导数可以获得如下的关系式。
[0096][0097]
将速度与弹道倾角的动力学方程带入到上式中就可以获得如下的关系式
[0098][0099]
之后就可以建立关于高度误差的动力学关系式,因为是等高度飞行,误差关系式(12) 的第一项与第二项只与飞行器本身的飞行状态有关。
[0100][0101]
其中er指当前高度和期望巡航高度的误差,式(12)中的第一项动力学方程包含控制量 (推力、攻角和倾侧角),因此,可以建立关于高度误差动力学的反馈控制律,使误差的变化规律近似于一个典型的二阶环节,误差快速的收敛到零,二阶环节如下所示
[0102][0103]
其中,ξ为典型的阻尼系数,一般选取为0.707具有较好的动态品质,,为高度误差的 2阶环节的自然振动频率,直接影响到高度变化的动态品质。将误差动力学方程(12)带入式(13) 如下就可以获得反馈形式的控制律,
[0104]
[0105]
如果控制量能使误差动力学满足上式关系,那么飞行器在高度方向上的误差将呈指数形式递减,最后收敛到零,从而保持等高飞行。
[0106]
然后是等速飞行的控制方案设计,与高度的控制方案不同,速度的动力学方程已经包含了三个控制量,不能对其进行二次导数的求取,因此,直接采用高度控制的方案将不可行,下面将针对速度动力学的特点,设计关于速度误差的pid控制器,使飞行器的速度保持在恒定的飞行状态下。假设需要飞行器保持巡航速度vr进行飞行,则巡航速度以及巡航速度的导数如下所示
[0107][0108]
飞行器在当前状态的速度以及速度的导数根据动力学仿真如下所示
[0109][0110]
则可以建立起关于速度误差的动力学方程,公式(17)第一项为速度误差的导数项,由于等速飞行,至于飞行器的当前状态有关,第二项为速度误差项,值得注意的是第三项为关于速度误差到当前时刻的积分项,用于表述误差的积累情况,该项能够通过积分器实时获得。
[0111][0112]
其中ev指当前速度和期望巡航速度的误差,因此,可以建立起关于误差积累项的反馈控制律,使飞行器的积累误差按照指数收敛的性质收敛到零,下面为关于速度误差积累项的二阶环节。
[0113][0114]
其中,ξ同样为典型的阻尼系数,一般选取为0.707,ωn为速度误差的2阶环节的自然振动频率,直接影响到速度变化的动态品质。将速度的误差动力学方程(17)带入到式(18) 中就可以将反馈制导律表述为如下的形式
[0115][0116]
当所作用的控制量满足上式关系,则飞行器的速度将跟踪上所需的巡航速度,并且当误差存在时,误差将按照上式的关系式所具有的动态性质逐渐收敛到零,从而维持等速飞行。
[0117]
最后是等弹道倾角飞行的控制方案设计,除了在纵向平面巡航段需要保持等高等速飞行以外,在飞行器爬升段和返航段,飞行器还需要维持一定的弹道倾角上升和下降。为了保证高度和速度平稳上升或者下降,还需要设计等弹道倾角的控制方案,控制飞行器在爬升段和返航段以特定的弹道倾角指令飞行,从而实现高度和速度的调整。
[0118]
与等速控制类似,设计关于弹道倾角误差的pid控制器,使飞行器的弹道倾角保持
在恒定的飞行状态下。假设需要飞行器保持等弹道倾角γr进行飞行,则弹道倾角以及弹道倾角的导数如下所示
[0119][0120]
飞行器在当前状态纵向平面的弹道倾角以及弹道倾角的导数根据动力学仿真如下所示
[0121][0122]
则可以建立起关于弹道倾角误差的动力学方程如公式(22)所示,第一项为弹道倾角误差的导数项,由于等弹道倾角飞行,只与飞行器的当前状态有关,第二项为弹道倾角误差项,值得注意的是第三项为关于弹道倾角误差到当前时刻的积分项,用于表述误差的积累情况,该项能够通过积分器实时获得。
[0123][0124]
其中e
γ
指当前弹道倾角和期望弹道倾角的误差,因此,可以建立起关于误差积累项的反馈控制律,使飞行器的积累误差按照指数收敛的性质收敛到零,下面为关于弹道倾角误差积累项的二阶环节。
[0125][0126]
其中,ξ同样为典型的阻尼系数,一般选取为0.707,ω
γ
为弹道倾角误差的2阶环节的自然振动频率,直接影响到弹道倾角变化的动态品质。将弹道倾角的误差动力学方程(22)带入到式(23)中就可以将反馈制导律表述为如下的形式
[0127][0128]
当所作用的控制量满足上式关系,则飞行器的弹道倾角将跟踪上所需的弹道倾角,并且当误差存在时,误差将按照上式的关系式所具有的动态性质逐渐收敛到零,飞行器就能保持等弹道倾角的飞行状态,从而实现稳定的爬升与降落。
[0129]
步骤三:纵横向快速解耦解算飞行控制量:
[0130]
由步骤二,高马赫飞行器在纵向平面的高度、速度以及弹道倾角都可以控制在指定的数值上,同时,在横向方向,制导律还需要保证飞行器能够实现指定的过载指令。
[0131]
飞行器在保证等高等速飞行的同时,横向平面也存在过载指令,横向加速度主要由倾侧角产生。当存在倾侧角时,升力就会在横向平面产生分量,从而实现横向加速度。通过设计巡航轨迹获得所需的横向过载后,就可以通过下式表示为控制量(推力、攻角和倾侧角)的表示形式。
[0132]
[0133]
其中n为过载指令大小,当控制量满足上式时,飞行器横向的瞬时加速度就是横向过载指令。
[0134]
综合以上情况,高度控制、速度控制和横向过载控制组成了一组方程,这组方程的解就是高马赫飞行器在等高等速巡航飞行状态下实现指定机动的控制量,方程如下所示
[0135][0136]
通过观察发现,式(26)中第一个方程的第一项部分可以用第二个方程来表示,因此,将式(26)中的第二个方程带入到第一个方程的第一项中可以获得如下形式的公式
[0137][0138]
于是,三个方程就可以表示为上面的形式,为了方便求解,将方程中的常数部分采用统一的符号进行表示,则可以写成如下的形式
[0139][0140]
其中a1,a2,a3,c1,c2,c3为公式记号,代表的内容如下所示,将式(29)代入式(28),即为控制方程(27):
[0141][0142]
通过观察发现,倾侧角只与式(13)中第一个方程和第三个方程有关。因此,将式(13) 中第一个方程和第三个方程联立求解,获得倾侧角的解析求解公式
[0143][0144]
于是,就只剩下如下两个方程,其中包含两个未知量
[0145][0146]
对于含有2个未知量的非线性方程组,通过牛顿法可以找到其解,但是在工程应用中,弹载计算机的能力十分有限,通常需要快速的获得控制量。下面将给出一种将上式含有2个未知量的非线性方程组转化为只需要求解1个未知量的非线性方程求解的问题,这将大大提高求解的效率。
[0147]
由于控制量t在两个方程中都只出现过一次,可以消除t,从而得到只有一个参数的非线性方程。其方程如下:
[0148]
f(α)=a1cosσ(c
2-a2d(α))tanα-(c
1-l(α)a1cosσ)a2=0
ꢀꢀꢀ
(32)
[0149]
因此采用牛顿法就可以快速的获得所需的攻角值,牛顿法的计算公式如式(33)所示,其中αk为迭代运算中第k次计算得到的攻角,α
k 1
为第k 1次计算得到的攻角,f(αk)为方程(32)左端代入αk的值,f'(αk)为方程(32)左端求导后代入αk的值。
[0150][0151]
因为攻角的变化范围比较小,主要集中在零度附近,那么推力大小将通过如下公式获得
[0152][0153]
高马赫飞行器纵横向解耦快速计算等高等速飞行状态下实现指定机动过载指令
的控制量的计算流程如图2所示。
[0154]
通过步骤一、二和三建立高马赫飞行器的动力学运动学模型和制导控制方法并根据爬升段、巡航段和返航段的气动数据、动力系统数据等完成全段仿真,设置巡航高度为30km,巡航速度为6ma,无横向机动的全程仿真飞行弹道如图3所示,仿真结果如表1所示
[0155]
表1无横向机动仿真结果
[0156][0157]
然后高马赫飞行器完成飞行任务后需要返程,返回过程需要保证一定的横向加速度,飞行仿真的结果如下表所示,飞行弹道如图4所示
[0158]
表2存在返航的仿真结果
[0159][0160]
从上面的仿真可以看出,由步骤一、二和三建立的高马赫飞行器仿真模型可以实现起飞和降落以及6ma的巡航速度30km巡航高度的巡航飞行状态,单方向飞行时航程可以达到 7000km,但当存在返航过程时,由于需要产生横向机动,损失能量,因此总航程只有5600 公里左右。
[0161]
步骤四:飞行器机动突防策略设计:
[0162]
高马赫飞行器巡航飞行过程很长,本身也有燃油消耗限制,再加上气动和推力等因素,不可能长时间保持较大的过载机动突防。而且,一般拦截系统的拦截过程都分为初制导、中制导和末制导。对于时间比较长的初制导和中制导,高马赫飞行器作为突防方,只需要保持较低的过载并采取有一定突防效果的突防策略,而到了末制导段因为交战时间比较短高马赫飞行器可以提升自身的过载增加突防能力。但是由步骤三可知,推力作为控制量的调节范围是有限的,最大推力情况下能够实现的过载可以通过求解步骤三中的方程获得。因为不能无限大的增加机动过载,所以就需要对机动突防策略进行设计,以提高脱靶量增加突防能力。
[0163]
高马赫飞行器保持一定的速度和高度接近目标和防御阵地一定距离后,先采取0.5g~1g 的机动过载进行长时间的蛇形机动或者方波机动,尽可能在拦截弹在进入末制导阶段前进行突防。如果拦截弹对高马赫飞行器的拦截过程进入了末制导,飞行器就采用尽可能大的过载机动突防。由于拦截系统普遍采取比例导引制导律,在末制导段可以针对比例导引设计最优机动策略,让拦截弹制导过程最终的脱靶量数值最大。高马赫飞行器的
全程机动突防策略实施过程如图5所示。
[0164]
对高马赫飞行器采用步骤一所述模型进行建模,并采用步骤二三所述方法进行解耦并解算制导指令,那么由高马赫飞行器自身推力和气动系数等就可以决定进行机动时的过载指令的大小,最优机动突防策略需要设计的就是飞行器机动的方向。
[0165]
对于目标最优机动突防问题的求解,可以转换为一个时变、末段状态自由、控制受约束、性能对于拦截弹的高阶线性制导系统可以表示为如下的状态空间形式
[0166][0167]
y(t)=c(t)x(t)
ꢀꢀꢀ
(36)
[0168]
x(0)=0,t∈[0,tf]
ꢀꢀꢀ
(37)
[0169]
式中,x(t)是状态向量;u(t)是控制输入变量;y(t)是输出变量;a(t)、b(t)和c(t)是线性系统的系数矩阵,tf为终止时刻。
[0170]
此时当输入为脉冲函数时,伴随系统可以等价于如下线性系统
[0171][0172][0173]
w(t)=zu(t)
ꢀꢀꢀ
(40)
[0174]
其中,z(t)和zu(t)时伴随系统的状态变量;w(t)是伴随系统的输出变量。
[0175]
对于上面的拦截弹末段高阶线性系统模型,为了让拦截弹脱靶量最大,性能泛函j取为
[0176]
minj=-y(tf)=-c(tf)x(tf)
ꢀꢀꢀ
(41)
[0177]
且满足约束
[0178][0179]
|u(t)|≤1
ꢀꢀꢀ
(43)
[0180]
设λ(t)为协态变量,则相应的哈密顿函数h(x,λ,u,t)为
[0181]
h(x,λ,u,t)=λ
t
(t)(a(t)x(t) b(t)u(t))
ꢀꢀꢀ
(44)
[0182]
其中x,λ,u,t分别代表状态变量、协态变量、控制输入变量、时间,由协态方程和横截条件可以得到
[0183][0184][0185]
由于哈密顿函数h(x,λ,u,t)关于控制变量是线性的,其系数记为
[0186]
s(t)=λ
t
(t)b(t)=b
t
(t)λ(t)
ꢀꢀꢀ
(47)
[0187]
要使哈密顿函数取得最小值,则最优控制取决于s(t)的符号,只要两者的乘积始终小于0就可以使哈密顿函数取得最小值,即
[0188][0189]
由上可以看出,最优控制的形式是bang-bang控制。同时通过比较协态方程和上面
的伴随方程可以得到
[0190]
λ(t)=z(t
f-t)
ꢀꢀꢀ
(49)
[0191]
即最优机动突防中的协态变量就是目标阶跃机动导致的伴随系统的状态变量在时间线上的反向变换。则伴随系统(38)、(39)的输出变量w(t)的导数为
[0192][0193]
与式(47)比较,可以得到
[0194][0195]
因此最优机动控制的形式为
[0196][0197]
其中t
go
为剩余飞行时间等于t
f-t,即对于高阶线性制导系统,最优机动突防控制切换函数的表达式正是目标阶跃机动的脱靶量导数的符号的相反数,求解脱靶量导数的符号,就可以直接确定最优机动加速度的控制符号,并获取最优控制切换时刻。
[0198]
上面的最优机动策略是针对一般的线性制导系统的制导模型,但是实际的导弹的制导系统是非常复杂的非线性系统,在本项目中用来评估的拦截弹模型也是非线性的,但是根据研究同等情况下非线性和线性的仿真中最终脱靶量和切换时刻相差很小,可以做一定的近似。因此可以采用比较复杂的五阶线性系统来代替本拦截模型的制导控制系统来进行机动突防控制指令的切换时刻的求解。
[0199]
五阶线性系统并带有一个二阶多项式环节的传递函数为
[0200][0201]
通过伴随法仿真得到脱靶量随时间变化的曲线如图6所示,由图脱靶量在t/t为2和5 附近分别存在一个极值点,此时脱靶量导数为0,按照上面的最优机动策略,这两个时刻就是控制指令反转的时刻。通过控制机动过载方向,就能让末制导阶段拦截弹的脱靶量处于一直增加的状态,此时的脱靶量随时间的变化曲线如图7所示。从图7可以看出,采用最优机动突防策略,脱靶量会一直处于增加状态,而阶跃机动突防只在最开始的一段与最优机动的脱靶量变化规律相似,正弦机动的脱靶量变化规律波动很大,但是正弦机动脱靶量最大处也不如最优机动策略。
[0202]
最后通过攻防对抗仿真验证本发明提出的机动突防策略对突防性能提升的效果,拦截模型采用六自由度的sm-6拦截系统模型,将高马赫飞行器的rcs设置为0.1m2,进行了如下两种情况对不同机动策略的仿真,仿真次数设置为100次:
[0203]
情况1:高马赫飞行器模型巡航飞行采用1g过载蛇形机动,拦截弹发射距离140km,拦截系统模型进入末制导后高马赫飞行器模型分别进行无机动、1.7g阶跃机动和1.7g最优机动。
[0204]
情况2:高马赫飞行器模型巡航飞行采用0.5g过载蛇形机动,拦截弹发射距离130km,拦截系统模型进入末制导后高马赫飞行器模型分别进行无机动、1.5g阶跃机动和1.5g最优机动。
[0205]
攻防对抗仿真结果如下表所示:
[0206]
表3机动策略攻防对抗仿真结果(突防概率)
[0207][0208]
从上表可以看出,在这两种情况下,拦截仿真结果与图7所示脱靶量变化规律相似,最优机动的突防效果大于正弦机动,正弦机动的突防效果在某些情况下会比阶跃机动更好。因此采用本发明的机动策略可以显著提升高马赫飞行器面对拦截系统的机动突防能力,提升突防概率。
[0209]
综上所述,通过上述步骤,本发明实现了高马赫飞行器的运动学动力学建模以及在指定机动过载下等高等速巡航飞行的制导控制指令快速解耦解算并在此基础上设计了机动突防策略,可以完成高马赫飞行器的全段飞行控制,对比仿真结果也显示相比传统突防策略可以大大提升突防性能,具有实际应用的价值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。