技术特征:
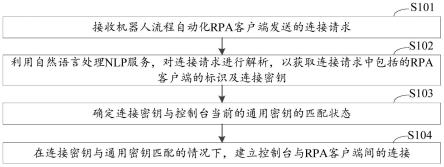
1.一种结合rpa和ai的无人值守机器人的部署方法,其特征在于,包括:接收机器人流程自动化rpa客户端发送的连接请求;利用自然语言处理nlp服务,对所述连接请求进行解析,以获取所述连接请求中包括的所述rpa客户端的标识及连接密钥;确定所述连接密钥与控制台当前的通用密钥的匹配状态;在所述连接密钥与所述通用密钥匹配的情况下,建立所述控制台与所述rpa客户端间的连接。2.如权利要求1所述的方法,其特征在于,在所述建立所述控制台与所述rpa客户端间的连接之后,还包括:利用所述rpa客户端的标识更新所述控制台中的客户端列表,其中,所述客户端列表中包括由所述控制台控制的各个rpa客户端标识。3.如权利要求1所述的方法,其特征在于,在所述确定所述连接密钥与控制台当前的通用密钥的匹配状态之后,还包括:在所述连接密钥与所述通用密钥未匹配的情况下,获取与所述rpa客户端的标识对应的私有密钥;在所述连接密钥与所述私有密钥匹配的情况下,向所述rpa客户端返回与所述rpa客户端的标识对应的历史运行数据。4.如权利要求3所述的方法,其特征在于,在所述获取与所述rpa客户端的标识对应的私有密钥之前,还包括:响应于与所述rpa客户端的标识关联的私有密钥创建控件被触发,生成与所述rpa客户端的标识对应的私有密钥。5.如权利要求1-4任一所述的方法,其特征在于,还包括:响应于到达预设的更新周期,对所述通用密钥进行更新;或者,响应于收到通用密钥更新请求,对所述通用密钥进行更新。6.如权利要求1-4任一所述的方法,其特征在于,在所述建立所述控制台与所述rpa客户端间的连接之后,还包括:接收所述rpa客户端发送的rpa机器人同步请求,其中,所述同步请求中包括至少一个rpa机器人标识;将所述至少一个rpa机器人标识与所述rpa客户端进行关联存储。7.一种结合rpa和ai的无人值守机器人的部署装置,其特征在于,包括:接收模块,用于接收机器人流程自动化rpa客户端发送的连接请求;解析模块,用于利用自然语言处理nlp服务,对所述连接请求进行解析,以获取所述连接请求中包括的所述rpa客户端的标识及连接密钥;确定模块,用于确定所述连接密钥与控制台当前的通用密钥的匹配状态;连接模块,用于在所述连接密钥与所述通用密钥匹配的情况下,建立所述控制台与所述rpa客户端间的连接。8.如权利要求7所述的装置,其特征在于,还包括:更新模块,用于利用所述rpa客户端的标识更新所述控制台中的客户端列表,其中,所述客户端列表中包括由所述控制台控制的各个rpa客户端标识。
9.如权利要求7所述的装置,其特征在于,还包括:获取模块,用于在所述连接密钥与所述通用密钥未匹配的情况下,获取与所述rpa客户端的标识对应的私有密钥;发送模块,用于在所述连接密钥与所述私有密钥匹配的情况下,向所述rpa客户端返回与所述rpa客户端的标识对应的历史运行数据。10.如权利要求9所述的装置,其特征在于,还包括:生成模块,用于响应于与所述rpa客户端的标识关联的私有密钥创建控件被触发,生成与所述rpa客户端的标识对应的私有密钥。11.如权利要求7-10任一所述的装置,其特征在于,所述更新模块,还用于:响应于到达预设的更新周期,对所述通用密钥进行更新;或者,响应于收到通用密钥更新请求,对所述通用密钥进行更新。12.如权利要求7-10任一所述的装置,其特征在于,所述接收模块,还用于:接收所述rpa客户端发送的rpa机器人同步请求,其中,所述同步请求中包括至少一个rpa机器人标识;所述装置,还包括:存储模块,用于将所述至少一个rpa机器人标识与所述rpa客户端进行关联存储。13.一种计算机设备,其特征在于,包括:处理器和存储器,所述存储器中存储指令,所述指令由处理器加载并执行,以实现如权利要求1至6任一项所述的方法。14.一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-6中任一项所述的方法。
技术总结
本公开提出一种结合RPA和AI的无人值守机器人的部署方法。其中,该方法包括:在接收机器人流程自动化RPA客户端发送的连接请求后,可以利用自然语言处理NLP服务,对连接请求进行解析,以获取连接请求中包括的RPA客户端的标识及连接密钥,并确定连接密钥与控制台当前的通用密钥的匹配状态,在连接密钥与通用密钥匹配的情况下,可以建立控制台与RPA客户端间的连接。由此,通过利用控制台的通用密钥,即可建立设备与控制台的连接,从而省去了每个RPA机器人部署过程中的设备配置及密钥生成过程,节省了部署大规模无人值守机器人的时间,提高了部署大规模无人值守机器人的效率。部署大规模无人值守机器人的效率。部署大规模无人值守机器人的效率。
技术研发人员:宋贲宇 王瑞丰
受保护的技术使用者:来也科技(北京)有限公司
技术研发日:2022.02.25
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。