双重相机
1.相关申请案
2.本技术为申请号202080001266.1(pct申请号为 pct/ib2020/050002)、申请日2020年01月01日、发明名称“多光圈相机,具有至少一个两种状态变焦的相机”的分案申请。
技术领域
3.本文公开的实施例总体上涉及多种数字相机,并且更具体地涉及具有一折叠变焦镜头的双光圈变焦数字相机。
背景技术:
4.小型的多光圈(尤其是双光圈,也称为“双镜头”或“双重相机”) 的数字相机是已知的。微型化技术允许将这种相机结合在诸如平板电脑和行动电话的小型便携式电子设备中(后者在下文中统称为“智慧型电话”),它们在其中提供了诸如变焦的高级成像能力,例如参见共同拥有的pct专利申请pct/ib2015/056004号,其全部内容通过引用合并在此。这种相机和/或在此公开的相机是具有严格的高度限制的相机,通常小于1公分,越薄越好。
5.已知多种双光圈变焦相机,其中一个相机具有较广的(wide)视野 fovw(称为“广角相机(wide camera)”),另一个具有较窄的“望远 (telophoto)”视野fovt(称为“望远相机(tele camera)”)。望远相机需要具有尽可能小的尺寸,以合适于相机所安装的装置的厚度(最好不从装置外壳突出),同时合适于与常用的影像传感器一起使用。当使用具有一长的(tele)有效焦距(long effective focal length,efl) 的望远镜头来获得一相对较高的变焦效果时,此问题甚至更为关键。众所周知,应用于镜头的术语“efl”是指从后主平面(rearprincipal plane)到近轴焦平面(paraxial focal plane)的距离。后主平面是通过从无限远处追踪一轴上旁基底光线(on-axis parabasalray)来计算的,并使用旁基底的影像空间边缘光线角度(parabasal'simage space marginal ray angle)来确定。
6.还已知多种双光圈变焦相机包括一直立式广角相机和折叠式望远相机,例如参见共同拥有的美国专利9,392,188号。广角相机是“直立式”相机,包括一广角影像传感器(或简称为“传感器”)和一广角镜头模块,所述模块包括一具有广角镜头对称轴线的一广角定焦镜头元件(或简称为“镜头”)。折叠式望远相机机包括一望远影像传感器和一望远镜头模块,所述望远镜头模块包括一具有望远镜头对称轴线的一望远定焦镜头。双光圈变焦相机还包括一反射元件(也称为光路折叠元件(optical path folding element)或“opfe”),所述反射元件将来自物体或场景沿着第一光路的光线折叠到朝向望远影像传感器的第二光路。第一和第二光路彼此垂直。广角镜头对称轴线沿(平行于) 所述第一光路,望远镜头对称轴线沿第二光路。反射元件具有相对于广角镜对称轴线和望远镜头对称轴均倾斜45度的反射元件对称轴,并且可操作以在物体和望远影像传感器之间提供折叠的光路。
7.广角镜头具有一宽广的视野(fovw),望远镜头的望远视野(fovt) 比fovw窄。在一示例中,与广角相机相比,望远相机提供了x5缩放效果。
8.还已知具有多个镜头元件的小型折叠相机,所述镜头元件包括分为两组或更多组
的多个镜头元件,其中一或多(“组”)镜头元件可相对于另一镜头元件或一组镜头元件移动。用于相对运动的多个致动器 (多个马达)包括带螺钉的步进马达(step motors)或压电致动器 (piezoelectric actuators)。但是这种相机的一普遍问题是它们的结构要求f值(f#)大于或等于3,并且f#随变焦倍数增加。它们的致动器慢且嘈杂(压电)或笨重(步进马达),存在可靠性问题且价格昂贵。对于在这样的相机中获得的两个极限变焦状态,已知的光学设计也需要较大的镜头元件高度以用于一给定的f#。
技术实现要素:
9.在一示例性实施例中,提供一种双重相机,包括:一广角相机,包括一广角镜头,所述广角镜头具有一广角有效焦距eflw;以及一折叠式望远相机,包括具有一光轴和一有效焦距efl
t
的一望远镜头,以及一光路折叠组件opfe,其中所述望远镜头从一物侧到一像侧包括一第一镜头元件组g1、一第二镜头元件组g2和一第三镜头元件组g3;其中所述第二镜头元件组g2可沿所述光轴相对于所述第一镜头元件组g1 和所述第三镜头元件组g3移动,以将所述望远镜头置于两个变焦状态,所述两个变焦状态为一第一变焦状态和一第二变焦状态;其中所述有效焦距efl
t
从所述第一变焦状态下的一efl
tmin
值转变为所述第二变焦状态下的一efl
tmax
值;其中efl
tmin
》1.5x eflw,并且其中efl
tmax
》1.5xefl
tmin
。
10.在一些示例性实施例中,efl
tmin
在10毫米至20毫米的范围内,而 efl
tmax
在20毫米至40毫米的范围内。
11.在一些示例性实施例中,efl
tmin
=15毫米,efl
tmax
=30毫米。
12.在一些示例性实施例中,efl
tmin
=13毫米,efl
tmax
=26毫米。
13.在一些示例性实施例中,efl
tmin
比eflw大2倍或更多倍。
14.在一些示例性实施例中,用于所述镜头元件组g2的移动的致动是在闭环控制中执行。
15.在一些示例性实施例中,用于所述镜头元件组g1和所述镜头元件组g3的移动的致动在开环控制中执行。
16.在一些示例性实施例中,所述第一镜头元件组g1、所述第二镜头元件组g2和所述第三镜头元件组g3的移动是使用多个音圈马达机构产生。
17.在一些示例性实施例中,所述第一镜头元件组g1、所述第二镜头元件组g2和所述第三镜头元件组g3的移动由产生一线性轨道的一球体引导机构沿着所述光轴所引导。
18.在一些示例性实施例中,所述球体引导机构包括:一镜头元件组 g2镜架上的至少一沟槽、一镜头元件组g1 g3镜架上的至少一沟槽以及多个球体,所述球体位于所述镜头元件组g2镜架和所述镜头元件组 g1 g3镜架上的所述至少一沟槽之间。
19.在一些示例性实施例中,efl
tmax
/efl
tmin
》1.9。
附图说明
20.下面参考在此段落之后列出的附图来描述本文公开的实施例的非限制性示例。出现在多个附图中的相同结构、元件或零件通常在所有出现的附图中均标有相同的数字。如果显示相同的元件,但仅在一个图中编号,则假定它们在所有出现的图中均具有相同的编号。附图和说明意旨在解释和阐明本文公开的实施例,并且不应以任何方式被认为是限制
性的。在图中:
21.图1a示意性地显示双重相机的总体立体图,所述双重相机包括一直立式相机和变焦折叠相机;
22.图1b在一分解图中显示图1a的双重相机;
23.图2a显示图1a和图1b中的变焦折叠相机,具有处于第一变焦状态的第一镜头光学设计并且具有光线轨迹;
24.图2b显示图1a和图1b中的变焦折叠相机,具有处于第二变焦状态的第一镜头光学设计并且具有光线轨迹;
25.图2c显示处于第一变焦状态的第一光学设计的镜头元件的细节;
26.图2d显示处于第二变焦状态的第一光学设计的镜头元件的细节;
27.图3a显示处于第一变焦状态的第二光学设计的镜头元件的细节;
28.图3b显示处于第二变焦状态的第二光学设计的镜头元件的细节;
29.图4a显示处于第一变焦状态的第三光学设计的镜头元件的细节;
30.图4b显示处于第二变焦状态的第三光学设计的镜头元件的细节;
31.图4c显示处于第一变焦状态的第四光学设计的镜头元件的细节;
32.图4d显示处于第二变焦状态的第四光学设计的镜头元件的细节。
33.图4e显示处于第一变焦状态的第五光学设计的镜头元件的细节;
34.图4f显示处于第二变焦状态的第五光学设计的镜头元件的细节。
35.图4g显示处于第一变焦状态的第六光学设计的镜头元件的细节。
36.图4h显示处于第二变焦状态的第六光学设计的镜头元件的细节;
37.图5a从顶部透视图示意性地显示望远镜头和传感器模块,具有第二示例的光学设计的镜头,其处于efl
tmin
状态;
38.图5b另一顶部透视图示意性地显示图5a的望远镜头和传感器模块;
39.图5c从顶部透视图示意性地显示望远镜头和传感器模块,具有第二示例的光学设计的镜头,其处于efl
tmax
状态;
40.图5d另一顶部透视图示意性地显示图5c的望远镜头和传感器模块;
41.图5e显示图5a和图5d的望远镜头和传感器模块的分解图;
42.图6a从一角度显示在图5a和图5b中处于efl
tmin
状态的望远镜头和传感器模块的顶部和底部致动子组件的底视图;
43.图6b从另一角度显示在图5c和图5d中处于efl
tmax
状态的望远镜头和传感器模块的顶部和底部致动子组件的底视图;
44.图6c从一底视图显示顶部致动子组件;
45.图7显示图5a的望远镜头和传感器模块中的固定轨道的细节;
46.图8显示图5a的望远镜头和传感器模块中的电子子组件;
47.图9a显示具有轴向对称性的镜头元件;
48.图9b显示具有两个切口的切口镜头元件;
49.图10以流程图显示用于操作本文公开的变焦折叠相机的示例性方法;
50.图11a是根据本公开主题的一些示例,撞击在镜头元件的凸面上的光线的冲击点的示意图,以及这些冲击点在平面p上的正交投影的示意图;
51.图11b是根据本公开主题的一些示例,撞击在镜头元件的凹面上的光线的冲击点的示意图,以及这些冲击点在平面p上的正交投影的示意图;
52.图12是根据本发明的一些示例,冲击点在平面p上的正交投影以及净高度值(clear height value,ch)的示意图;
53.图13是根据本公开主题的一些示例,冲击点在平面p上的正交投影以及净光圈的示意图;
54.图14以框图示意性地显示本文公开的系统的实施例;
55.图15a至图15c示意性地显示包括折叠和非折叠镜头设计的双光圈相机和三光圈相机的设计。
具体实施方式
56.图1a示意性地显示标号为100的双重相机的实施例的总体立体图,所述双重相机包括一直立的广角相机102以及一折叠式望远相机 103,所述折叠式望远相机103包括一opfe 104(例如棱镜)以及一变焦折叠式望远相机镜头和传感器模块(或简称为“模块”)106。广角镜相机包括具有一固定有效焦距eflw的一广角镜头110。例如eflw可以是2 至5毫米。在望远相机103中,opfe 104被保持在棱镜支架108中。模块 106包括一遮片107。遮片107可以覆盖模块106或相机103的一些或全部元件。图1b显示移除遮片107并具有更多细节的双重相机100。模块106 还包括望远镜头114,其具有望远镜头光轴116、望远传感器118以及可选地玻璃窗130(参见例如图2a)。玻璃窗130可用于过滤红外(ir)波长的光,用于传感器118的机械防护和/或用于传感器118的防尘保护。为简单起见,此后可能会省略针对相机、镜头或影像传感器所使用的“望远(tele)”一词。在一些实施例中,镜头和影像传感器模块是分开的,使得望远传感器具有其自己的模块,而下面描述的其他功能和部件(特别是图5a至图5e的镜头致动器结构502)仅保留在望远相机镜头模块中。下面的整个描述也涉及这样的实施例。在其他实施例中,本文描述的系统可以包括一或多个附加相机,例如形成一个三重相机系统。除了广角和望远相机外,三相机还可以包括超广角相机,其中超广角相机的efl为efl
uw
《0.7x eflw。
57.双重相机100还包括或耦合至一控制器(未显示),所述控制器控制各种相机功能,包括以下描述的多个镜头组和元件的运动。
58.所述镜头114包括三组的镜头元件g1、g2和g3,其分别容纳在第一组(g1)镜头壳体(或支架)120、第二组(g2)镜头壳体122和第三组 (g3)镜头壳体124中。下面参考图2a至图2d至图4a至图4h三种不同的镜头设计的细节提供用于镜头元件组g1、g2和g3。在接下来详细描述的各种实施例中,至少一镜头元件组相对于另一镜头元件组沿镜头光轴 116移动,以提供至少两个望远镜头有效焦距efl
t
:最小efl
tmin
和最大 efl
tmax
。例如efl
tmin
可以是10至20毫米,而efl
tmax
可以是20至40毫米。这样可在两个大型efl之间提供变焦功能,同时保持较小的望摄镜头f 值(f#
t
)。另外,efl
tmin
比eflw大2倍或更多倍,使得双重镜头100可以在eflw和efl
tmax
之间提供光学变焦。除efl外,对于每个变焦状态,望远镜头总光道长度(tele lens total track length,ttl
t
)定义为当镜头聚焦在无限远处时,沿着光轴从第一镜头元件朝向物侧的第一表面(s1请参见下文)到影像传感器的距离,其包括所有镜头元件和玻璃窗。对于第一变焦状态定义为ttl
tmin
,对于第二变焦状态定义为ttl
tmax
。 ttl
tmin
和ttl
tmax
例如在图2c、图2d、图3a和图3b,但是这些定义适用于本技术中的所有实施例。
59.图2a显示一变焦折叠望远相机103'如同相机103,具有opfe 104(例如棱镜)、一镜头114'如同镜头114,以及传感器118',具有第一示例性光学设计并且具有光线轨迹,其中望远镜头处于一第一变焦状态,即efl=efl
tmin
。另外,玻璃窗130可以位于所有镜头元件和影像传感器118之间。图2b显示处于一第二变焦状态的折叠式望远相机 103’,即efl=efl
tmax
。图2c显示处于第一变焦状态的第一光学设计的镜头114'的细节,图2d显示处于第二变焦状态的镜头114'的细节。
60.镜头114'具有第一示例性光学设计,由表1至表4所表示,并且包括标记为l1至l8的八个镜头元件,其从在面对棱镜的物侧(“物体侧”)的l1开始,在朝向影像传感器的像侧的l8结束。表1提供了光学镜头设计中每个表面的光学数据。表1中省略了opfe的光学数据(棱镜或反射镜),因为在物体和s1之间可以使用许多本领域已知的opfe设计。这样的opfe的非限制性示例包括:由玻璃或塑料制成的棱镜,使得所述棱镜的折射率可以改变(例如,在1-3的范围内);限制杂散光的 opfe(例如参见在共同拥有的国际专利申请pct/ib2018/054928中公开的内容);低剖面棱镜(例如参见共同拥有的美国临时专利申请 62/657,003);扫描式opfe(例如参见共同拥有的国际专利申请 pct/ib2018/050885和pct/ib2017/);具有ois机制的opfe(例如共同拥有的美国专利号9927600);和一面镜子。
61.表2提供了变焦数据,它是表1中曲面之间距离的附加数据,以及各种变焦位置的更变参数。表3提供了非球面数据,这是表1中非球面的多个表面的其他光学数据。表4提供了以毫米(mm)为单位的镜头元件和镜头元件组的焦距。对于第二示例性光学设计(表5-8),第三示例性光学设计(表9-12),第四示例性光学设计(表13-16)和第五示例性光学设计(表17-20)在下方存在相似的表。
62.在下面的各个示例性实施例中公开的镜头包括镜头元件的几个镜头组(g1、g2、g3等),每个组包括多个标记为li的镜头元件。每个镜头元件li具有相应的前表面s2i-1和相应的后表面s2i,其中“i”是 1至n之间的整数。如本文所使用的,各个镜头元件的术语“前表面”是指一镜头元件靠近镜头入口(镜头物侧)的表面,术语“后表面”是指一镜头元件靠近影像传感器(镜头像侧)的表面。前表面和/或后表面在某些情况下可以是非球面的。前表面和/或后表面在某些情况下可以是球面的。但是这些选项不是限制性的。镜头元件l1至ln可以由各种材料制成,例如塑料或玻璃。一些镜头元件可以由与其他镜头元件不同的材料制成。在几个图中作为示例显示符号“gi”、“li”、“si”(对于“gi”符号参见图2c、图2d;对于“li”符号参见图2b;对于“si”符号参见图4a),但是这些符号适用于本技术中的所有实施例。
63.在本说明书中,零件、元件或零件或元件组的“高度(height)”被定义为在第一光轴方向(示例性坐标系中的y方向)零件/元素/组的最低点和零件/元素/组的最高点之间的距离。术语“上部”或“顶部”是指相对于同一零件/元件或组的其他部分,所述任何零件/元件/ 组沿y轴方向更靠近并面向一被成像的(被拍摄的)物体的部分。术语“下部”或“底部”是指相对于同一零件/组件或组的其他部分,所述任何零件/元件/组沿y轴方向更远且背离一被成像的物体的部分。
64.在表1(以及表5和9)中,r是表面的曲率半径,t是从表面到平行于光轴的下一个表面的距离。由于某些镜头之间的距离随变焦和聚焦而变化,因此表2、表6和表10中给出了各
种变焦和聚焦位置的附加厚度数据。请注意,当将表2、表6和表10中的附加数据用于无限远的物体时,ttlt是从s1到影像传感器的所有t值的总和。d是表面的光学直径。d/2表示“半直径”或直径的一半。r、t和d的单位是毫米(mm)。 nd和vd分别是位于表面和下一表面之间的镜头元件材料的折射率和阿贝数(abbe number)。
65.表1、表5和表9中定义了表面类型,表3、表7和表11中定义了表面系数:
[0066]-平面-具有无限的曲率半径;
[0067]-使用等式eq.1所定义的非球面(even-aspherical surface, evas)及其详细信息如表3、7和11所示:
[0068]
(eq.1)
[0069]
其中r是光学表面上某个点与相关光轴(第一轴或第二轴)的距离 (且垂直于所述轴),k是圆锥曲线常数(conic parameter),c=1/r,α是表3、7和11中给出的多个系数。注意对于任何非球面,r的最大值 (“max r”)是相应表面的半直径(d/2)。
[0070]-使用等式eq.2和下面的子方程式定义qt1曲面:
[0071]
(eq.2)
[0072][0073][0074][0075][0076][0077][0078]
其中{z,r}是标准圆柱极坐标(standard cyl indrical polarcoordinates),c是表面的近轴曲率(paraxial curvature),k是圆锥曲线常数(conic parameter),nr是标准半径(norm radius),an是镜头数据表中所示的多项式系数(polynomial coefficients)。
[0079]
一“光阑表面(stop surface)”(表2、6、10、14、18和22):在公开的实施例中,当从第一变焦状态转变为第二变焦状态时,一镜头光圈光阑表面(aperture stop surface,或孔径光阑表面)的位置可以改变。在这种情况下,所述光阑决定整个镜头模块的f#。例如,在一些实施例中,在第一变焦状态下,到达影像平面以形成中心视场的影像的光量是由物侧l1的第一镜头附近的光圈光阑所决定,而在第二变焦状态下到达影像平面以形成中心视场的影像的光量是由另一镜头元件附近的光圈光阑所决定,例如镜头元件l4附近。在其他实施例中,当从第一变焦状态转变为第二变焦状态时,一镜头光圈光阑表面的位置可以不改变。棱镜的反射面,通常也称为“镜子”。
[0080]
下表中显示的影像传感器直径d是指影像传感器对角线的可能尺寸。
[0081]
表1:
[0082][0083][0084]
表2:
[0085][0086]
表3:
[0087][0088][0089]
表4:
[0090][0091]
在第一示例(“示例1”)中,镜头元件l1-l8被分为三组:包括镜头元件l1和l2的第一组g1,包括镜头元件l3和l4的第二组g2和包括镜头元件l5至l8的第三组。注意,表4中列出的镜头或组焦距具有正或负值,其指示副镜头元件或组的相应正或负屈光力。因此在表4中,l1、 l3、l5和l8具有正屈光力,而l2、l4、l6和l7具有负屈光力,类似地 g1和g2具有正屈
光力,而g3具有负屈光力。这也适用于表8和表12。
[0092]
在示例1中,通过使组g1和g3相对于影像传感器118移动,同时组 g2相对于影像传感器118保持静止而使相机进入两个变焦状态。然后g3 还可以移动以在每个变焦状态下进行对焦。表2列出了确切的距离和相对位置。在示例1中,g1和g3相对于g2(和影像传感器)移动,以使相机进入图2a和图2c中所示的第一变焦状态,其中efl
t
=efl
tmin
=15毫米, f#=f#
tmin
=2.8并且ttl
t
=ttl
tmin
=16.309毫米,并且进入图2b和图2d 中所示的第二变焦状态,其中eflt=efl
tmax
=30毫米,f#=f#
tmax
= 4且ttl
t
=ttl
tmin
=27.581毫米。移动范围可以是例如5至10毫米。在第一状态下,g1与g2隔开距离d4(对于efl为15毫米的情况,表2中s4和s5之间的距离,即0.131毫米),g2与g3隔开距离d8(对于efl为15毫米的情况,表2中s8和s9之间的距离,即5.080至5.364毫米,取决于焦距);g3与窗口130的距离为d16(对于efl为15毫米的情况,表2中s16 和s17之间的距离,即1.094至0.810毫米,取决于焦距)。在第二状态下,g1与g2隔开距离d4'(对于efl为30毫米的情况,表2中s4和s5之间的距离,即11.403毫米),g2与g3隔开距离d8'(对于efl为30毫米的情况,表2中s8和s9之间的距离,即0.060至0.434毫米,取决于聚焦距离); g3与窗口130的距离为d16'(对于efl为30毫米的情况,表2中s
16
和s
17
之间的距离,即6.114至5.740毫米,取决于焦距)。
[0093]
图3a显示处于第一变焦状态中,如相机103的一折叠式望远相机中的示例性光学设计的第二实施例的镜头元件的细节,图3b显示处于第二变焦状态中第二光学设计的镜头元件的细节。这些图显示镜头 114”,影像传感器118和可选的窗口130。第二种光学设计由表5至表8 表示,包括八个标记为l1至l8的镜头元件,从面向棱镜的物侧上的l1 开始并结束于朝影像传感器的影像侧的l8。表5提供了光学数据,表6 提供了变焦数据,表7提供了非球面数据,表8提供了以毫米为单位的镜头或组焦距。
[0094]
在第二示例(“示例2”)中,在镜头114”中,镜头元件l1-l8被分为三组:包括镜头元件l1和l2的第一组g1、包括镜头元件l3至l5的第二组g2和包括镜头元件l6至l8的第三组。
[0095]
在示例2中,通过使组g1和g3相对于影像传感器在一给定范围r
1,3
中一起移动,同时使组g2相对于影像传感器在小于r
1,3
的一范围r2中移动,而使得相机进入两个变焦状态。在示例2中,r
1,3
=7.509毫米,而r2=1.574毫米。组g2在相对于影像传感器的任何变焦状态下还可以在一范围r
af
中移动,以将相机106的焦距从无穷远改变到1米。r
af
可能高达550微米(um),具体取决于变焦状态。图3a显示处于第一变焦状态的示例2,其中efl
t
=efl
tmin
=15毫米,f#=f#
tmin
=并且ttl
t
=ttl
tmin
=17.373毫米,以及图3b显示处于第二变焦状态的示例2,其中efl
t
=efl
tmax
=30毫米,f#=f#
tmax
=4,并且ttl
t
=ttl
tmax
=24.881毫米。
[0096]
在示例2,满足以下条件:
[0097]r1,3
和r2小于0.6x(efl
tmax
–
efl
tmin
),当然小于0.75 x(efl
tmax
–
efl
tmin
)。f#
tmin
小于1.0x f#
tmax x efl
tmin
/efl
tmax
,小于1.2 x f#
tmax x efl
tmin
/efl
tmax
,小于1.5x f#
tmax x efl
tmin
/efl
tmax
,小于 1.8x f#
tmax x efl
tmin
/efl
tmax
。
[0098]
在第一状态下,g1与g2隔开距离d4(对于efl为15毫米的情况,表 6中s4和s5之间的距离,即1.246至1.012毫米,取决于焦距),g2与g3 隔开距离d10(对于efl为15毫米的情况,表6中s
10
和s
11
之间的距离,即6.136至6.370毫米,取决于焦距);g3与窗口130的距离为d16(对于 efl为15毫米的情况,表6中s
16
和
s17
之间的距离,即0.229毫米)。在第二状态下,g1与g2隔开距离d4'(对于efl为30毫米的情况,表6中s4和 s5之间的距离,即7.181至6.658毫米,
取决于焦离),g2与g3隔开距离 d10'(对于efl为30毫米的情况,表6中s
10
和s
11
之间的距离,即0.2至 0.725毫米,取决于焦距);g3与窗口130的距离为d16'(对于efl为30 毫米的情况,表6中s
16
和s
17
之间的距离,即7.738毫米)。
[0099]
表5:
[0100][0101][0102]
表6:
[0103][0104]
表7:
[0105][0106][0107]
表8:
[0108][0109]
图4a显示处于第一变焦状态中,如相机103的一折叠式望远相机中的示例性光学设计的第三实施例的镜头元件的细节,图4b显示处于第二变焦状态中第三光学设计的镜头元件的细节。这些图显示镜头 114”',影像传感器118和可选的窗口130。第三种光学设计由表9至表 12表示,包括八个标记为l1至l8的镜头元件,从面向棱镜的物侧上的 l1开始并结束于朝影像传感器的影像侧的l8。表9提供了光学数据,表 10提供了变焦数据,表11提供了非球面数据,表12提供了以毫米为单位的镜头或组焦距。
[0110]
在镜头114”'中,镜头元件l1至l8被分为三组:包括镜头元件l1 和l2的第一组g1、包括镜头元件l3和l4的第二组g2和包括镜头元件l5 至l8的第三组。
[0111]
在第三示例性用途("示例3")中,通过使组g1和g3相对于影像传感器在一给定范围中移动,同时保持组g2静止,而使相机进入两个变焦状态。移动范围例如可以是5至10毫米。g1可进一步移动以进行对焦。在示例3中,g1和g3相对于g2(和影像传感器)移动,以使相机进入图4a 所示的第一变焦状态,其中efl
t
=efl
tmin
=15毫米,f#=f#
tmin
=2.74 并且ttl
t
=ttl
tmin
=16.78毫米,以及图4b所示的第二变焦状态,其中 efl
t
=efl
tmax
=30毫米,f#=f#
tmax
=4,并且ttl
t
=ttl
tmax
=26.958毫米。在第一状态下,g1与g2隔开距离d4(对于efl为15毫米的情况,表10中 s4和s5之间的距离,即0.199至0.870毫米,取决于焦距),g2与g3隔开距离d8(对于efl为15毫米的情况,表10中s8和s9之间的距离,即6.050 毫米);g3与窗口130的距离为d16(对于efl为15毫米的情况,表10中s
16
和s
17
之间的距离,即0.650毫米)。在第二状态下,g1与g2隔开距离 d4(对于efl为30毫米的情况,表10中s4和s5之间的距离,即10.377至 11.031毫米,取决于焦距),g2与g3隔开距离d8(对于efl为30毫米的情况,表10中s8和s9之间的距离,即0.06毫米);g3与窗口130的距离为 d16(对于efl为30毫米的情况,表10中s
16
和s
17
之间的距离,即6.64毫米)。
[0112]
表9:
[0113][0114][0115]
表10:
[0116][0117]
表11:
[0118][0119][0120]
表12:
[0121][0122]
图4c显示处于第一变焦状态中,如相机103的一折叠式望远相机中的示例性光学设计的第四实施例的镜头元件的细节,图4d显示处于第二变焦状态中第四光学设计的镜头元件的细节。这些图显示镜头 114
””
,影像传感器118和可选的窗口130。第四种光学设计由表13 至表16表示,包括八个标记为l1至l8的镜头元件,从面向棱镜的物侧上的l1开始并结束于朝影像传感器的影像侧的l8。表13提供了光学数据,表14提供了变焦数据,表15提供了非球面数据,表16提供了以毫米为单位的镜头或组焦距。
[0123]
在一第四示例中("示例4"),在镜头114
””
中,镜头元件l1至l8 被分为三组:包括镜头元件l1和l2的第一组g1、包括镜头元件l3和l5 的第二组g2和包括镜头元件l6至l8的第三组。
[0124]
在示例4中,通过使组g1和g3(作为一单元)相对于影像传感器在一给定范围r
1,3
中移动,同时在所述变焦过程中相对于影像传感器保持组g2静止,而使相机进入两个变焦状态。在示例5中,r
1,3
=7.065毫米。虽然当改变变焦状态时组g2不移动,然而组g2相对于影像传感器以及组g1和g3可在任何变焦状态下在一范围r
af
内移动,以将相机106的焦距从无穷远改变到1米。r
af
可能高达730微米,具体取决于变焦状态。图4c显示处于第一变焦状态的示例4,其中efl
t
=efl
tmin
=15毫米,f# =f#
tmin
=2.74并且ttl
t
=ttl
tmin
=17.865毫米,以及图4d显示处于第二变焦状态的示例4,其中efl
t
=efl
tmax
=30毫米,f#=f#
tmax
=4,并且ttl
t
=ttl
tmax
=24.93毫米。
[0125]
在第一状态下,g1与g2隔开距离d4(对于efl为15毫米的情况,表 14中s4和s5之间的距离),g2与g3隔开距离d10(对于efl为15毫米的情况,表14中s
10
和s
11
之间的距离);g3与窗口130的距离为d16(对于efl 为15毫米的情况,表14中s
16
和s
17
之间的距离)。在第二状态下,g1与 g2隔开距离d4'(对于efl为30毫米的情况,表14中s4和s5之间的距离), g2与g3隔开距离d10'(对于efl为30毫米的情况,表14中s
10
和s
11
之间的距离);g3与窗口130的距离为d16'(对于efl为30毫米的情况,表14中 s
16
和s
17
之间的距离)。
[0126]
表13:
[0127][0128]
表14:
[0129][0130]
表15:
[0131][0132]
表16:
[0133][0134]
[0135]
图4e显示处于第一变焦状态中,如相机103的一折叠式望远相机中的示例性光学设计的第五实施例的镜头元件的细节,图4f显示处于第二变焦状态中第五光学设计的镜头元件的细节。这些图显示镜头 114
””
',影像传感器118和可选的窗口130。第五种光学设计由表17 至表20表示,包括八个标记为l1至l8的镜头元件,从面向棱镜的物侧上的l1开始并结束于朝影像传感器的影像侧的l8。表17提供了光学数据,表18提供了变焦数据,表19提供了非球面数据,表20提供了以毫米为单位的镜头或组焦距。
[0136]
在一第五示例中("示例5"),在镜头114
””
'中,镜头元件l1至 l8被分为三组:包括镜头元件l1和l2的第一组g1、包括镜头元件l3和 l5的第二组g2和包括镜头元件l6至l8的第三组。
[0137]
在示例5中,通过使组g1和g3(作为一单元)相对于影像传感器在一给定范围r
1,3
中移动,同时相对于影像传感器保持组g2静止,而使相机进入两个变焦状态。在示例5中,r
1,3
=7.697毫米。组g1 g3还可以相对于影像传感器和组g2在一范围r
af
中一起移动,以将相机106的焦距从无穷远改变到1米。r
af
可能高达1.8毫米,具体取决于变焦状态。图 4e显示处于第一变焦状态的示例5,其中efl
t
=efl
tmin
=15毫米,f#=f#
tmin
=2并且ttl
t
=ttl
tmin
=18.1毫米,以及图4f显示处于第二变焦状态的示例5,其中efl
t
=efl
tmax
=30毫米,f#=f#
tmax
=4,并且ttl
t
= ttl
tmax
=25.8毫米。
[0138]
在第一状态下,g1与g2隔开距离d4(对于efl为15毫米的情况,表 18中s4和s5之间的距离),g2与g3隔开距离d10(对于efl为15毫米的情况,表18中s
10
和s
11
之间的距离);g3与窗口130的距离为d16(对于efl 为15毫米的情况,表18中s
16
和s
17
之间的距离)。在第二状态下,g1与 g2隔开距离d4'(对于efl为30毫米的情况,表18中s4和s5之间的距离), g2与g3隔开距离d10'(对于efl为30毫米的情况,表18中s
10
和s
11
之间的距离);g3与窗口130的距离为d16'(对于efl为30毫米的情况,表17中 s
16
和s
17
之间的距离)。
[0139]
表17:
[0140][0141][0142]
表18:
[0143][0144]
表19:
[0145][0146][0147]
表20:
[0148][0149]
图4g显示处于第一变焦状态中,如相机103的一折叠式望远相机中的示例性光学设计的第六实施例的镜头元件的细节,图4h显示处于第二变焦状态中第六光学设计的镜头元件的细节。这些图显示镜头 114
”””
,影像传感器118和可选的窗口130。第六种光学设计由表21 至表24表示,包括八个标记为l1至l8的镜头元件,从面向棱镜的物侧上的l1开始并结束于朝影像传感器的影像侧的l8。表21提供了光学数据,表22提供了变焦数据,表23提供了非球面数据,表24提供了以毫米为单位的镜头或组焦距。
[0150]
在镜头114
”””
中,镜头元件l1至l8被分为三组:包括镜头元件 l1、l2和l3的第一组g1、包括镜头元件l4、l5和l6的第二组g2和包括镜头元件l7和l8的第三组。
[0151]
在示例6中,通过使组g1和g3(作为一单元)相对于影像传感器在一给定范围r
1,3
中一起移动,同时组g2相对于影像传感器在一范围r2中移动,其中r2《r
1,3
,而使相机进入两个变焦状态。在示例6中,r
1,3
=5.641 毫米,以及r2=0.718。组g1 g2 g3还可以相对于影像传感器在一范围 r
af
中一起移动,以将相机106的焦距从无穷远改变到1米或2米。r
af
可能高达0.4毫米,具体取决于变焦状态。
[0152]
图4g显示处于第一变焦状态的示例6,其中efl
t
=efl
tmin
=13毫米, f#=f#
tmin
=1.8并且ttl
t
=ttl
tmin
=19.84毫米,以及图4h显示处于第二变焦状态的示例6,其中efl
t
=efl
tmax
=26毫米,f#=f#
tmax
=2.88,并且ttl
t
=ttl
tmax
=25.85毫米。
[0153]
在第一状态下,g1与g2隔开距离d7(对于efl为13毫米的情况,表 22中s7和s8之间的距离),g2与g3隔开距离d13(对于efl为13毫米的情况,表22中s
14
和s
22
之间的距离);g3与窗口130的距离为d17(对于efl 为13毫米的情况,表22中s
17
和s
18
之间的距离)。在第二状态下,g1与 g2隔开距离d7'(对于efl为26毫米的情况,表22中s7和s8之间的距离), g2与g3隔开距离d13'(对于efl为26毫米的情况,表22中s
13
和s
14
之间的距离);g3与窗口130的距离为d17'(对于efl为26毫米的情况,表21中 s
17
和s
18
之间的距离)。
[0154]
表21:
[0155][0156][0157]
表22:
[0158][0159][0160]
表23:
[0161][0162]
表24:
[0163]
[0164][0165]
图5a至图5e示意性地显示编号为500的望远镜头和传感器模块(或简称为“模块”)的示例。附图的描述继续参考图5a至图5e以及许多其他图中所示的坐标系xyz。在示例中,模块500具有第二示例的光学设计。在模块500中,提供了在镜头114'、114”和114”'的变焦状态和聚焦状态之间改变所需的致动方法的示例。图5a示意性地从一顶部透视图显示处于efl
tmin
状态的模块500。图5b从另一顶部透视图示意性地显示处于efl
tmin
状态的模块500。图5c从一顶部透视图示意性地显示处于efl
tmax
状态的模块500。图5d从另一顶部透视图示意性地显示处于 efl
tmax
状态的模块500。图5e显示模块500的分解图。模块500包括一 g1 g3镜头子组件502、g2镜头子组件504、传感器子组件506、电磁(em) 子组件508、底座子组件510、第一磁体512、第一线圈514、第二磁体 516、第一组(示例性为4个)球体520和第二组(示例性为4个)球体522。镜头子组件502和504共享镜头光轴116。
[0166]
第一线圈514紧邻第一磁体512定位,并且刚性地耦合至基座子组件510(相对于基座子组件510不移动)。第一线圈514可以被焊接至一 pcb,诸如pcb 822(图8),或者被布线至电路外部(未显示),其允许向第一线圈514发送输入和输出电流,所述电流携带操作所需的功率和电子讯号。线圈514示例性地为矩形,并且典型地包括几十个线圈绕组(即在50至250个的一非限制性范围内),典型的电阻为10至30欧姆。第一磁体512是分裂磁体,使得中间的分隔线512a将其分成两侧:在分隔线512a的一侧,磁体512具有面向正x方向的北磁极,而在分离线512a的另一侧,磁体512具有面向正x方向的南磁极。在驱动第一线圈514中的电流时,在第一磁体512上产生一第一洛伦兹力(lorentz force)。在示例中,沿顺时针方向流过第一线圈514的电流将在第一磁体512上沿正z方向引起一第一洛伦兹力,而沿逆时针方向流过第一线圈512的电流将在第一磁体512上沿负z方向引起一洛伦兹力。在一示例中,第一洛伦兹力可用于使底部致动子组件560在一开环控制中从“第一致动”状态转换到“第二致动”状态,反之亦然,即从止动件720a-b和 722a-b之间的底部致动子组件560致动(参见下文)。
[0167]
图6a和图6b提供了模块500的致动部件的两个底部透视图,显示处于efl
tmin
状态的顶部致动子组件550和底部致动子组件560。图6c从底部透视图显示顶部致动子组件550。顶部致动子组件550包括g2镜头子组件504、第二磁体516和多个步进磁体626。底部致动子组件560包括 g1 g3镜头子组件502、第一磁体512、步进磁体628和四个轭602a-b(图 6b)和604a-b(图6a)。图7显示底座子组件510的细节,所述底座子组件 510包括导轨710a和710b以及止动磁体702a-b和704a-b。注意,在图7 中,出于说明的目的,止动磁体702a-b和704a-b与止动件720a-b和 722a-b分开。箭头显示止挡磁体702a-b和704a-b在止动件720a-b和 722a-b中的粘合位置。轭602a-b被拉到止动磁体702a-b上,而轭604a-b 被拉到止动磁体704a-b上。每个导轨710a-b包括相应的沟槽712a-b。基座子组件510还包括两个机械止动件706和708,其示例性地连接到导轨710b。机械止动件706和708限制了顶部致动子组件550的
行程。图8 显示在pcb 822上em子组件508的细节。
[0168]
在一示例中,模块500允许镜头子组件502和504在沿着镜头光轴 116的方向上的相对运动。模块500具有在3至40毫米范围内的示例性长度/宽度/高度尺寸,即模块500可以装在尺寸为3x3x3毫米3至40x40x40 毫米3的盒子中。在示例中,模块500具有高度(沿y轴),所述高度由镜头元件l1
…
ln的最大净光圈,加上各个镜头子组件502和504的塑料厚度(例如在范围为0.5至1.5毫米),加上遮片107的厚度(例如遮片厚度在0.1至0.3毫米的范围内),再加上相应的镜头子组件502和504与遮片 107之间的两个气隙(airgaps)的厚度(各个气隙厚度例如在0.05至 0.15毫米的范围内)所限定。镜头元件l1
…
ln的净光圈可以是一圆形或切口镜头的净光圈,如下所述。
[0169]
在模块500中,三个镜头组(g1、g2和g3)被保持在两个镜头子组件中:镜头子组件502夹持镜头组g1 g3,以及镜头子组件504夹持镜头组g2的。镜头子组件502和504通常由塑料制成。在一些实施例中,镜头子组件502和镜头组g1 g3可以是一单一部分(并且类似地,镜头子组件504和g2可以是一单一部分)。在一些实施例中,它们可以是分开的部分。镜头子组件502和504例如可以通过塑料模制或替代地通过其他方法来制造。第一和第二磁体512和516分别从横跨镜头光轴116的两个相对侧(x方向)固定地附接到(例如胶粘)到镜头子组件502和504。
[0170]
镜头子组件502包括多个沟槽,这些沟槽定义了一机械的球体引导机构,从而允许在一线性导轨中进行致动以实现变焦需求。在所述示例中,描述了六个沟槽,但是可以使用其他数量的沟槽:两个沟槽 542a-b(图5e)沿着z方向在镜头子组件502的顶面上,以及四个沟槽 624a-d(图6a)也沿着z方向在镜头子组件502的底表面上。镜头子组件504包括若干沟槽,其与镜头子组件502的一些沟槽配合。在所示的实施例中,镜头子组件504包括四个沟槽642a-d,在图6c中仅显示三个。沟槽642a-d彼此平行,并且沿着z轴(光轴),并且用于沿着z方向引导顶部致动子组件550。
[0171]
顶部致动子组件550定位在底部致动子组件560的顶部,使得沟槽 642a-b(642c-d)在沟槽542a(542b)的正上方并平行于沟槽 542a(542b)。
[0172]
在所示的实施例中,四个球体520被定位在沟槽542a-b的顶部上 (两个球体在各个沟槽的顶部上)并且在沟槽642a-d的下方(图6c),使得球体520将镜头子组件502和镜头子组件50分开4并防止两个零件相互接触。在其他实施例中,模块500在镜头子组件502和504之间可以具有四个以上的球体,例如每侧最多7个球体,或者总共最多14个球体。球体520可以由氧化铝或另一种陶瓷材料、金属或塑料材料制成。典型的球体直径可以在0.3至1毫米的非限制性范围内。诸如在共同拥有的国际pct专利申请pct/ib2017/052383中标题为“旋转式球体引导式音圈马达”的其他球体尺寸和定位考量。
[0173]
由于镜头子组件502和504示例性地是塑料模制的,所以零件尺寸上存在一定的公差,对于每个尺寸通常为几十微米或更小。所述公差可能导致相邻(面对)的沟槽542a-b和642a-d之间的位置未对准。为了更好地对准沟槽,一些沟槽(例如542a-b和642c-d)可以是v形的,即具有v形横截面形状以确保球体定位,而沟槽642a-b可以具有更宽的梯形横截面。沟槽542b和642c-d在组装期间对准,而由于后者沟槽的梯形截面,沟槽542a和642a-b的对准而具有小的间隙。梯形沟槽的横截面仅是示例性的,并且可以使用其他沟槽的横截面形状(例如,矩形、平坦等),使得一对沟槽通过所述沟槽形状很好地对准,而另一对沟槽的对
准具有间隙。
[0174]
本文提出的设计可以允许三个镜头元件组的精确对准。g1和g3彼此很好地对齐,因为它们机械固定在同一零件上,并且可以在产品生命周期中保持对齐。在一些实施例中,镜头子组件504被模制为一个部件,并且g1至g3的对准是根据塑料模制公差。在一些实施例中,镜头子组件504被模制成几个零件,这些零件在工厂中使用主动或被动对准程序被胶粘。g2使用一单一沟槽对(542b和642c和/或642d)以与g1和g3 对准,即镜头子组件502和504彼此对准而没有中间部件。
[0175]
四个球体522位于沟槽712a-b的顶部(两个滚珠在每个沟槽的顶部)和沟槽624a-d的下方,以使球体522将镜头子组件502与底座子组件 510分开,并防止这两个部分彼此接触。在其他实施例中,模块500可以具有4个以上的球体,例如每侧最多7个球体或总共14个球体。关于球体522的尺寸、材料和其他考量与球体520类似。关于沟槽712a-b和 624a-d的其他考量与如上所述的沟槽542a-b和642a-d类似。
[0176]
模块500还包括多个铁磁轭716(图7),其牢固地附接(例如胶合) 到底座子组件510,使得各个轭定位在三个步进磁体626和628的下方 (沿y方向)。铁磁轭716可以是遮片107的一固定部分。在其他实施例中,遮片107本身可以由铁磁材料制成,或者遮片107的底部可以由铁磁材料制成,使得铁磁轭是是遮片的一部分。每个铁磁轭716在负y方向上通过磁力拉动一些步进磁体626或628,因此所有铁磁轭均防止顶部致动子组件550和底部致动子组件560彼此分离以及与底座510和遮片107 分离。球体520防止顶部致动子组件550接触底部致动子组件560,球体 522防止底部致动子组件560接触底作子组件510。因此顶部致动子组件 550和底部致动子组件560沿y轴被限制并且不沿y方向移动。沟槽和球体结构进一步限制了顶部致动子组件550和底部致动子组件560,使其仅沿镜头光轴116(z轴)移动。
[0177]
图7示模块500中的底座子组件510和固定导轨的细节。沿着z方向,顶部致动子组件550被限制为在机械止动件706和708之间移动,在其之间的距离等于g2所需的行程(大约1至3毫米)。而且沿着z方向,底部致动子组件560被限制为在机械止动件720a-b和722a-b和/或止动磁体 702a-b和704a-b之间移动。
[0178]
图8显示模块500中em子组件508的细节。em子组件508包括第二线圈818,两个霍尔棒元件("霍尔传感器",hall bar elements,hallsensors)834a和834b以及pcb822。第二线圈818和霍尔棒元件834a-b 可以被焊接(各个单独地)到pcb822。第二线圈818示例性地具有矩形形状,并且典型地包括几十个线圈绕组(例如在50至250个的一非限制范围内),典型电阻为10至40欧姆。pcb 822允许将输入和输出电流发送到第二线圈818和霍尔棒元件834a-b,所述电流携带操作所需的功率和电子信号。pcb 822可以通过走线(未显示)电性连接到外部相机。在示例(图5e)中,em子组件508位于紧邻第二磁体516。第二磁体516是分裂磁体,使得中间的分隔线516a将其分成两侧:在分隔线516a的一侧,磁体516具有面向正x方向的北磁极,而在分离线516a的另一侧,磁体 516具有面向正x方向的南磁极。在驱动第二线圈818中的电流时,在第二磁体516上产生一洛伦兹力(lorentz force)。在示例中,沿顺时针方向流过第二线圈818的电流将在第二磁体516上沿正z方向引起一洛伦兹力,而沿逆时针方向流过第二线圈818的电流将在第二磁体516上沿负z方向引起一洛伦兹力。
[0179]
霍尔棒元件834a-b被设计成测量每个霍尔棒元件的中心在x方向上的磁场(强度和符号)。霍尔棒元件834a-b可以感测第二磁体516的磁场强度和方向。在一示例中,霍尔棒
元件834a在pcb 822上的定位为:
[0180]
1.在x方向上,两个霍尔棒元件834a和834b与磁体516隔开一定距离(例如0.1至0.5毫米),在磁体516因变焦或聚焦需求而移动时,所述距离是恒定的。
[0181]
2.当系统处于第一变焦状态(eflt=15毫米)时,霍尔棒元件834a 沿z方向靠近分隔线516a。例如对于在第一状态变焦中的所有焦点位置 (连续地无限远到1米),霍尔棒元件834a沿着z方向与分隔线516a相距达r
af
。
[0182]
3.当系统处于第二缩放状态(eflt=30毫米)时,霍尔棒元件834b 沿z方向靠近分隔线516a。例如对于在第一状态变焦中的所有焦点位置 (连续地无限远到1米),霍尔元件834a沿着z方向与分隔线516a相距达 r
af
。
[0183]
在这样的定位方案中,当系统处于第一变焦状态时,霍尔棒元件 834a可以沿z方向测量第二磁体516的相应位置,因为在第一变焦状态下,在无穷远至1米焦点的焦点位置之间沿raf的834a轨迹的霍尔棒上,x方向磁场在具有可测量的梯度,并且x方向磁场可能与位置相关。另外,当系统处于第二变焦状态时,霍尔棒元件834b可以沿着z方向测量第二磁体516的相应位置,因为在第二缩放状态下,x方向磁场在沿着raf的霍尔棒834b轨迹上具有可测量的梯度。在无限远至1米焦点的焦点位置之间,x方向的磁场可能与位置相关。可以在集成电路(ic) 中实现控制电路(未显示),以在闭环中在多个变焦状态下运作时,以及在开环中在变焦状态之间的行进中(参见图10和以下描述),控制第二磁体516相对于em子组件508(以及相对于em子组件508所刚性连接的的底座子组件510)的位置。在一些例子中,ic可以与一个或两个霍尔元件834a-b组合。在其他情况下,ic可以是单独的晶片,其可以位于模块500的外部或内部(未显示)。在示例性实施例中,模块500所需的所有电性连接都连接到em子组件508,em子组件508相对于底作子组件 510和外部世界是固定的。这样不需要将电流传递到任何移动的部件。
[0184]
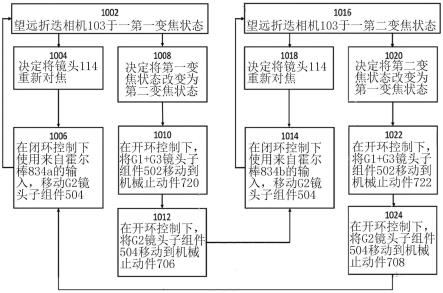
模块500的磁电设计允许以下操作方法来操作折叠式望远相机 103。图10以一流程图显示这种示例性方法。在步骤1002中,将望远相机103定位以与镜头114处于一(例如第一)变焦状态。在步骤1004中(由使用者或算法)决定将望远镜头114重新对焦,并在步骤1006中,在闭环控制下(由控制器
–
未显示),使用来自霍尔棒元件834a的输入,移动g2镜头子组件504,而将望远相机103置于第一变焦状态下的另一聚焦位置。在步骤1008中(由使用者或演算法)决定将相机103的镜头114 的变焦状态改变为另一(例如第二)变焦状态,并且在步骤1010中,在开环控制下,将g1 g3镜头子组件502移动到机械止动件720,随后在步骤1012中,在开环控制下将g2镜头子组件504移动到机械止动件706。然后在步骤1014中,在闭环控制下,使用来自霍尔棒元件834b的输入,移动g2镜头子组件504,以在步骤1016中将望远折叠相机103置于第二变焦状态下的一另一聚焦位置。在步骤1018中决定将镜头114重新对焦。在闭环控制下,通过使用来自霍尔棒元件834b的输入,移动g2镜头子组件,而在第二变焦状态下执行镜头114的重新对焦。在步骤1020 中(由使用者或演算法)决定将相机103的镜头114的第二变焦状态改变为第一变焦状态,并且在步骤1022中,在开环控制下,将g1 g3镜头子组件502移动到机械止动件722,随后在步骤1024中,在开环控制下,将g2镜头子组件504移到机械止动件708。
[0185]
在一些实施例中,任何镜头元件li的两个表面s2i-1,s2i可以具有包括两个切口(cuts,小平面facets)的两个光圈(aperture,或孔径)。在这种情况下,镜头元件li被称为“切口镜头元件”。切口使得镜头元件可以更低和/或更短。在一示例中,图9a显示具有轴向对称和高度h902的镜头元件902,并且图9b显示具有两个切口906和908并且具有高度h904的切口镜头元件904。镜头元件902和904具有相同的直径d。显然h904<h902。在所示的示例中,前两个镜头元件(l1和l2)是切口镜头元件。
[0186]
如下所解释,可以为每个表面sk定义1≤k≤2n的净高度值ch(sk),为每个表面sk定义1≤k≤2n的净光圈值ca(sk)。ca(sk)和ch(sk)定义每个镜头元件的每个表面sk的光学特性。
[0187]
如图11a、图11b和图12所示,每条穿过表面sk(对于1≤k≤2n)的光线都入射在所述表面的冲击点ip(impact point)上。光线从表面s1 进入镜头模块(例如114'、114”、114”'),并连续穿过表面s2至s2n。一些光线可以撞击在任何表面sk上,但不能/将不会到达影像传感器 118。对于一给定的表面sk,仅认为可以在影像传感器118上形成影像的光线形成了多个撞击点ip。ch(sk)定义为两条最可能的平行线之间的距离(参见图12中的线1200和1202,它们位于与镜头元件的光轴正交的平面p上(在图11a和图11b中,平面p平行于平面xy并垂直于光轴 116),因此所有冲击点ip在平面p上的正交投影iporth位于两条平行线之间。可以为每个表面sk定义ch(sk)(前后表面,1≤k≤2n)。
[0188]
ch(sk)的定义不取决于当前成像的对象,因为它是指“可以”在影像传感器上形成影像的光线。因此即使当前成像的对象位于不产生光的黑色背景中,所述定义也不是指所述黑色背景,因为它是指“可以”到达影像传感器以形成影像的任何光线(对于与黑色背景相反的一背景所发出的示例性光线)。
[0189]
例如图11a显示在与光轴116正交的平面p上的两个冲击点ip1和 ip2的正交投影ip
orth,1
,ip
orth,2
。如图11a所示,表面sk是凸的。
[0190]
图11b显示平面p上的两个冲击点ip3和ip4的正交投影ip
orth,3
, ip
orth,4
。在图3b中,表面sk是凹的。
[0191]
在图12中,平面p上的表面sk的所有冲击点ip的正交投影iporth 位于平行线1200和1202之间。因此ch(sk)是线1200和1202之间的距离。
[0192]
注意图13。根据当前公开的主题,对于各个给定表面sk(对于 1≤k≤2n)定义了一净光圈ca(sk),作为圆的直径,其中所述圆是位于平面p上,垂直于光轴116并围绕所有冲击点在平面p上所有正交投影 ip
orth
。如上所述,对于ch(sk),注意到ca(sk)的定义也不取决于当前被成像的对象。
[0193]
在图13中所示,所有冲击点ip在平面p上的外接正交投影iporth 为圆1300。所述圆1300的直径定义为ca(sk)。
[0194]
综上所述,本文公开的变焦相机旨在克服以下某些光学难题:
[0195]-efl
tmax
》1.8x efl
tmin
或efl
tmax
》1.5x efl
tmin
的镜头设计可确保对机械变焦产生显著的使用者体验效果。
[0196]-在一些实施例中(例如示例1),ttl
tmax
<efl
tmax
。在一些实施例中 (例如实施例2和3),ttl
tmax
<0.9
×
efl
tmax
。这样的镜头设计可以减少相机的长度(沿z轴)。
[0197]-在一些实施例中(示例1至3),第一镜头元件的净光圈(s1的直径) 大于所有其他镜头元件的净光圈。在一些实施例中(模块500),第一镜头具有为一切口镜头元件的第一镜头,参见第9图。有利地,这种镜头设计有助于实现小的相机高度。
[0198]-变焦状态的变化是由不超过两个实际的镜头组移动量所引起的。即为了改变变焦状态,一些镜头元件组在第一移动范围内一起移动,然后其余一些镜头元件组在第二移动范围内一起移动,而所有其他镜头元件组不移动。由于仅需要移动和控制两个机械元件,因此简化了制动器的控制和设计。
[0199]-在某些示例中,f#
tmin
《1.5xf#
tmax x efl
tmin
/efl
tmax
。在一些示例中,f#
tmin
<1.2
×
f#
tmax
×
efl
tmin
/efl
max
。这样的镜头设计可以针对第一状态实现低f#。
[0200]-在某些示例中,对于任何镜头元件组,从第一变焦状态到第二变焦状态的移动的进程均小于0.75x(efl
tmax
–
efl
tmin
)。在一些示例中,对于任何镜头元件组,从第一变焦状态到第二变焦状态的移动的进程均小于0.6倍(efl
tmax
–
efl
tmin
)。这样的镜头设计可以限制镜头元件的移动和/或简化致动。
[0201]-可以通过一起移动以用于改变变焦状态的镜头元件组之一者的进一步移动来进行对焦,从而简化致动器设计并改善控制。
[0202]
就本文公开的镜头的性能而言:
[0203]-具有3个镜头组的镜头设计可最大程度地减少镜头复杂度。
[0204]-具有(从物体侧开始)正、正和负光焦度的镜头组的镜头设计可以有助于较小的镜头组移动以进行变焦状态改变。
[0205]-在改变变焦状态的过程的一个示例(示例1)中,第一镜头元件组 g1移动第一量,并且第三镜头元件组g3移动第二量,而第二镜头元件组g2不移动。g3的进一步移动可用于进行对焦。
[0206]-在改变变焦状态的过程的另一示例(示例2)中,g1与g3一起移动第一量,并且g2移动第二量。g2的进一步移动可用于进行对焦。
[0207]-在改变变焦状态的过程的又一示例(示例3)中,g1移动第一量, g3移动第二量,并且g2不移动。第一g1的进一步移动可以用于进行对焦。
[0208]-在改变变焦状态的过程的又一示例(例子4)中,g1和g3一起移动,而g2不移动。第一g2的进一步移动可以用于进行对焦。
[0209]-在改变变焦状态的过程的又一示例(示例5)中,g1与g3一起移动,而g2不移动。g1和g3的进一步移动可用于进行对焦。
[0210]-在改变变焦状态的处理的又一示例(示例6)中,g1与g3一起移动第一量,并且g2移动第二量。所有三个镜头组一起进一步移动,因此 g1和g2和g3一起移动可用于进行对焦。
[0211]
表25总结了每个示例中的移动,并举例说明了移动范围:
[0212]
表25:
[0213]
[0214][0215]
在表25中提出的示例,其中多个镜头组被指示为移动以进行对焦,可以参考表中定义的镜头组作为一聚焦单元一起移动的设计。在一些实施例中(例如示例5和6),可以通过刚性地连接各个镜头组来将多个镜头组一起移动。
[0216]
g1范围,g2范围和g3范围中给出的值是指镜头组相对于影像传感器的总体移动的最大范围。
[0217]“af最大范围”行中给出的值是指镜头组相对于在“将组移动以进行对焦”行中所定义的影像传感器,在无限远和1米或2米之间进行对焦的最大移动范围,根据表2、6、10、14、18、22的相应相关表格,请参见上文。在大多数实施例中,af最大范围由较高变焦状态(即具有 efl
tmax
的状态)的镜头组移动所给出。
[0218]
在一些实施例中,g1和g3可以处于静止状态,即g1和g3不移动,而g2可以被移动以便改变变焦状态。
[0219]
图14示意性地显示编号为1400的电子装置的实施例,所述电子装置包括具有本文公开的至少一多变焦状态相机的多光圈相机。电子装置1400包括第一相机模块1410和第一镜头模块1414,第一相机模块 1410包括opfe 1412,第一镜头模块1414形成由第一影像传感器1416 记录的第一影像。第一镜头致动器1418可以移动镜头模块1414以用于进行对焦和/或光学影像稳定(ois)和/或在两个不同的变焦状态之间切换。在一些实施例中,电子装置1400可以进一步包括应用处理器 (ap)1440。在一些实施例中,第一校准数据可以被存储在例如相机模块的第一存储器1422中。在eeprom(electrically erasableprogrammable read only memory,电性可擦除可编程唯读存储器)中。在其他实施例中,第一校准数据可以被存储在第三存储器1450中,诸如电子设备1400的nvm(non-volatile memory,非易失性存储器)。第一校准数据可以包括校准数据的一或多个子集,例如一第一子集,包括在第一变焦状态下的广角相机和望远相机的传感器之间的校准数据,和/或一第二子集,包括在第二变焦状态下的广角相机和望远相机的传感器之间的校准数据,和/或一第三子集,包括处于第一变焦状态的望远相机的传感器和处于第二变焦状态的同一传感器之间的校准数据。电子装置1400还包括第二相机模块1430,其包括第二镜头模块 1432,其形成由第二影像传感器1434所记录的影像。第二镜头致动器 1436可以移动镜头模块1432以用于进行对焦和/或ois和/或在两个不同的变焦状态之间。在一些实施例中,第二校准数据可以存储在相机模块的第二存储器1438中。在其他实施例中,第二校准数据可以被存储在电子装置1400的
第三存储器1450中。第二校准数据可以包括校准数据的一或多个子集,例如上所述。
[0220]
在使用中,诸如ap 1440的处理单元可以从相机模块1410和1430 接收相应的第一影像数据和第二影像数据,并将相机控制信号提供给相机模块1410和1430。在一些实施例中,ap 1440可以从第三存储器1450接收校准数据。在其他实施例中,ap 1440可以接收分别存储在位于相机模块1410上的第一存储器和位于相机模块1430上的第二存储器中的校准数据。在又一实施例中,ap 1440可以从电子装置1400的第三存储器1450接收分别存储在位于相机模块1410上的第一存储器和位于相机模块1430上的第二存储器中的校准数据。在一些实施例中,类似装置1400的电子装置可以包括一个以上相机模块,所述相机模块是由折叠镜头设计和opfe实现。在其他实施例中,可以实现两个或更多个相机模块而无需opfe并且不具有折叠镜头设计结构,而是具有另一镜头设计结构。ap1440可以获得存储在第三存储器1450中的数据。所述数据可以包括第三校准数据。影像生成器1444可以是一处理器,被配置为根据校准数据和影像数据输出影像。影像生成器1444可以处理校准数据和影像数据以便输出输出影像。
[0221]
相机校准数据可能包括:
[0222]
相机模块1410和1430之间的立体(stereo)校准数据,特别是不同镜头和不同镜头变焦状态的所有可能组合,例如望远相机的两个不同的变焦状态。立体校准数据可以包括6个自由度,例如俯仰角(pitch)、偏航角(yaw)和横滚角(roll)、以及在x,y和z轴上的偏心(decenter)。
[0223]
相机模块1410和1430之间的立体校准数据,特别是不同变焦状态的所有可能组合,例如相机的两个不同变焦状态。这些数据可以包括6 个自由度。
[0224]
固有的相机参数,例如每个相机模块和每个不同缩放状态的焦距和畸变曲线,例如相机的两个不同的变焦状态。
[0225]
霍尔传感器位置值可对应于每个不同变焦状态(例如,无限远、1 公尺和最接近的焦点)中的不同焦点位置。
[0226]
对于每个不同的变焦状态,镜头模块的镜头阴影轮廓。
[0227]
图15a在立体图和截面立体图中示意性地显示具有自动对焦af并且编号为1500的双光圈变焦相机的实施例。相机1500包括标记为1502 和1504的两个子相机,每个子相机具有其自己的光学器件。因此,子相机1502包括具有光圈1508的光学组件1506和光学镜头模块1510以及传感器1512。类似地,子相机1504包括具有光圈1516的光学组件1514 和光学镜头模块1518。每个光学镜头模块可以包括几个镜头元件以及红外线(ir)滤光器1522a和1522b。可选地,属于不同光圈的一些或全部镜头元件可以形成在同一基板上。两个子相机彼此相邻放置,基线 1524位于两个光圈1508和1516的中心之间。各个子相机可以进一步包括af机构和/或光学影像稳定(ois)机构,分别为1526和1528,由控制器(未显示)控制。
[0228]
图15b以与xyz坐标系有关的立体剖视图示意性地显示具有折叠望远镜头的变焦和自动对焦双光圈相机1530的实施例。相机1530包括两个子相机,广角子相机1532和望远子相机1534。广角相机1532包括具有各自的光圈1538的广角光学组件和具有对称轴(和光轴)1542的镜头模块1540。望远相机1534包括具有相应光圈1548的望远光学组件和具有望远镜头对称轴(和光轴)1552a的光学镜头模块1550,以及一望远传感器1554。相机1530进一步包括opfe1556。望远光路从物体(未显示) 通过望远镜头延伸到望远传感器,并由箭头
1552b和1552a标记。如这里所示,可以将各种照相机元件安装在基板1562上,例如印刷电路板 (pcb)或在不同的基板(未显示)上。
[0229]
图15c示意性地显示具有一折叠的望远子相机1534的变焦和自动对焦三光圈相机1570的一般立体图的实施例。相机1570包括例如相机 1530的元件和功能。也就是说,相机1570包括相机1530的广角子相机 1532以及具有opfe 1556的望远子相机1534。相机1570进一步包括第三子相机1572,所述第三子相机1572可以是具有超广角镜头1574和影像传感器1578的超广角相机。在实施例中,第三子相机1572可以具有eflm和fovm,所述eflm和fovm在广角子相机和望远子相机的中间。第三子相机的对称轴(和光轴)1576与子相机1532的轴1542基本平行。请注意,虽然第一和第三子相机以特定排列显示(第三子相机1572更接近望远子相机1534),则可以更改此顺序,以使广角子相机和超广角子相机可以交换位置。
[0230]
尽管本公开描述了有限数量的实施例,但是应当理解,可以对这些实施例进行许多变化、修改和其他应用。一般而言,应将本揭示理解为不限于本文描述的特定实施例,而是仅由所附权利要求的范围限制。
[0231]
在本说明书中提及的所有参考文献均通过引用以其整体并入本文,其程度与每个单独的参考文献均被具体地和单独地指示以通过引用并入本文的程度相同。另外,在本技术中对任何参考文献的引用或标识均不应解释为承认所述参考文献可作为本技术的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
