1.本发明涉及基于水边线高频次观测的多时相遥感海岸线检测与潮滩检测方法,可解决因潮汐导致的水边线变化、云与地形阴影对海岸线、潮滩遥感检测造成的大量干扰,从而显著提高海岸线与潮滩遥感检测的准确度、自动化程度,属于环境遥感领域,它适用海岸线、潮滩变化监测。
背景技术:
2.根据《地球科学辞典》,海岸线一般指海边在多年的大潮时高潮所到达的界线,潮滩指在潮间带出露的沙泥滩。海陆水边线由于受潮汐作用以及风暴潮等影响,时刻处于变化之中,单次与低频次卫星遥感过境只能观测到瞬时水边线位置,无法获得海岸线位置,更无法获得潮滩位置。而且,低频次遥感数据在利用水体光谱指数提取水边线时,会因受云阴影的干扰降低数据处理的自动化程度。综上原因,低频次卫星遥感难以有效检测海岸线与潮滩,无法满足海岸带环境监测的需求。
3.在当前遥感卫星数量大幅度增加与遥感大数据技术快速发展的背景下,充分利用多源、多时相遥感观测技术,发挥水边线高频次动态观测的优势,既可通过观测高、低潮位时的水边线来达到岸线、潮滩检测的目的,又可克服云阴影的干扰,显著提高信息提取的自动化程度,满足大范围岸线、潮滩快速检测的应用需求。
技术实现要素:
4.1、目的:本发明的目的是,提出基于水边线高频次观测的多时相遥感海岸线与潮滩检测方法,发挥水边线高频次遥感动态观测的优势,不仅解决了低频次卫星遥感难以有效检测海岸线与潮滩问题,也可克服云阴影的干扰,同时通过加入数字高程数据(dem)克服地形阴影影响,显著提高信息提取的自动化程度。
5.2、需解决的技术问题
6.首要问题是如何利用多时相数据,准确检测高潮位与低潮位水边线;其次因云与地形阴影在水体识别中极易与水体混淆,从而影响水边线识别的效果,因此另一问题是如何克服水边线检测中云与地形阴影的干扰。
7.3、技术方案
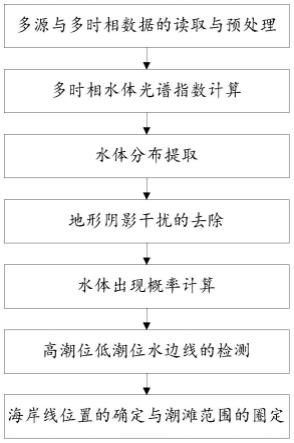
8.本发明针对上述需要解决的技术问题,提出了相应的解决方案。整体解决方案见附图1。本发明是基于水边线高频次动态观测的多时相遥感海岸线检测与潮滩方法,该方法具体步如下:
9.步骤一:多源与多时相数据的读取与预处理
10.选择并读取满足要求的遥感数据源。需选择具有绿光波段(550nm左右)、短波红外波段(1600nm左右)的遥感数据。根据读入数据的空间分辨率、坐标系、投影情况,运用遥感数据处理中常规的投影转换、空间重采样方法,将所有数据处理成为统一地理坐标系、投影、空间分辨率的遥感数据。
11.步骤二:多时相水体光谱指数计算
12.运用归一化水体光谱指数对步骤一输出的数据进行处理。归一化水体光谱指数的公式为,
13.ndwi=[r
(green)-r
(swir)
]/[r
(green)
r
(green)
]
[0014]
其中,ndwi为归一化水体光谱指数,r
(green)
为绿光波段(550nm左右)遥感反射率影像,r
(swir)
为短波红外波段(1600nm左右)遥感反射率影像。
[0015]
步骤三:水体分布提取
[0016]
以0为阈值,将ndwi图像上大于阈值的区域分割出来,即为水体分布。
[0017]
步骤四:地形阴影干扰的去除
[0018]
基于dem数据,计算地形坡度。以-20~20米为高程阈值、-10~10度坡度阈值,将小于阈值的区域分割出来(无地形阴影区),去除大于阈值的区域(含地形阴影区)。利用分割出的区域,对步骤三的水体分布数据进行掩模,保留“无地形阴影区”内的水体分布数据,去除“含地形阴影区”的水体分布。
[0019]
步骤五:水体出现概率计算
[0020]
逐像素计算每个像素在多时相观测中被分割为水体的次数占总观测次数之比,即为水体出现概率。
[0021]
步骤六:高潮位低潮位水边线的检测
[0022]
在水体出现概率图像上,低潮位水位线与大海间水体出现概率最高,潮滩内水体出现概率较低,位置越接近高潮位水位线水体出现概率越低。分析水体出现概率图像特征,设定合适的高潮位低潮位水边线水体出现概率阈值,进行图像二值化分割,并将栅格图像转化为矢量图像,即可得到高潮位低潮位水边线的矢量分布数据。由于区域内各像元出现云阴影的概率可以认为相同或很接近,某像素部分时相出现的云阴影不影响水体出现概率值的空间分布变化特征,因此不影响高潮位低潮位水边线的位置检测。
[0023]
步骤七:海岸线位置的确定与潮滩范围的圈定
[0024]
对高潮位水位线进行编辑修改,去除养殖塘等人工水体水边线,即为海岸线位置。根据高潮位水位线与海岸线位置,圈定二者直接的区域,即为潮滩范围。
[0025]
4、优点与功效
[0026]
本发明基于水边线高频次动态观测的多时相遥感海岸线检测与潮滩方法,其优点是:(1)发挥水边线高频次遥感动态观测的优势,显著提高海岸线位置、潮滩范围检测的准确度;(2)有效克服水边线检测中云与地形阴影的干扰,提高了自动化程度。
附图说明
[0027]
图1为本发明基于水边线高频次观测的多时相遥感海岸线与潮滩检测方法的实现流程图。
[0028]
图2-4为具体实施例过程与效果图。
具体实施方式
[0029]
为了更好的说明基于水边线高频次观测的多时相遥感海岸线与潮滩检测方法,在黄河三角洲作了2020年海岸线与潮滩检测实施示例。具体步骤如下:
[0030]
步骤一:多源与多时相数据的读取与预处理
[0031]
获取黄河三角洲2020年landsat-8、sentinel-2遥感数据共计652景。landsat-8、sentinel-2数据下载网址分别为
[0032]
https://earthexplorer.usgs.gov、https://scihub.copernicus.eu。分别选用二者为b3(green)与b6(swir)、b3(green)与b11(swir)波段。green为绿光波段(550nm左右),swir为短波红外波段(1600nm左右)。
[0033]
landsat-8数据空间分辨率为30m,sentinel-2数据b3与b11波段空间分辨率分别为10m、20m,需对sentinel-2进行空间重采样,使其与landsat-8一致。空间重采样采用envi遥感图像处理软件试用版的“resize data”工具完成,其中空间重采样目标分辨率设定为30m。两种数据投影一致,免做投影变换处理。处理后的数据为包含绿光波段、短波红外波段的遥感反射率数据。投影系为utm-wgs84、空间分辨率为30m、波段数为2。
[0034]
步骤二:多时相水体光谱指数计算
[0035]
运用归一化水体光谱指数对步骤一输出的数据进行处理。归一化水体光谱指数的公式为,
[0036]
ndwi=[r
(green)-r
(swir)
]/[r
(green)
r
(green)
]
[0037]
其中,ndwi为归一化水体光谱指数,r
(green)
为绿光波段(550nm左右)遥感反射率影像,r
(swir)
为短波红外波段(1600nm左右)遥感反射率影像。
[0038]
应用“归一化水体光谱指数公式”实现“多时相水体光谱指数计算”,采用的是envi遥感图像处理软件试用版的“band math”工具,将归一化水体光谱指数计算公式输入“band math”工具,并设定r
(green)、r(swir)
对应的波段编号来完成归一化水体光谱指数计算。
[0039]
步骤三:水体分布提取
[0040]
ndwi图像上海面等水体分布区域的数值比陆地大,一般水体的指数为正值,陆面的指数为负值。所以以0为阈值,将ndwi图像上大于阈值的区域分割出来,即为水体分布。
[0041]
步骤四:地形阴影干扰的去除
[0042]
基于dem数据,计算地形坡度。以-20~20米为高程阈值、-10~10度坡度阈值,将小于阈值的区域分割出来(无地形阴影区),去除大于阈值的区域(含地形阴影区)。利用分割出的区域,对步骤三的水体分布数据进行掩模,保留“无地形阴影区”内的水体分布数据,去除“含地形阴影区”的水体分布。掩模采用envi遥感图像处理软件试用版的“masking-apply mask”工具,设定高程阈值范围、坡度阈值范围后,将不满足阈值范围的ndwi像素值归零,仅保留满足阈值范围的ndwi像素值。
[0043]
步骤五:水体出现概率计算
[0044]
逐像素计算每个像素在多时相观测中被分割为水体的次数占总观测次数之比,即为水体出现概率(如图2所示)。计算采用envi遥感图像处理软件试用版“statistics-sum data bands”工具,对步骤四得到的“水体分布数据”,得到“水体次数”图像,对652景数据进行处理,得到“总观测次数”图像。最后利用envi遥感图像处理软件试用版“band math”工具,设定“水体次数”图像除以“总观测次数”图像,得到水体出现概率图像。
[0045]
步骤六:高潮位低潮位水边线的检测
[0046]
设定0.1、0.85为高潮位低潮位水边线水体出现概率阈值,进行图像二值化分割,得到高潮位与低潮位水体分布栅格数据(如图3所示),并将栅格数据转化为“表示高潮位与
低潮位水边线位置的”矢量数据,得到了高潮位与低潮位水边线的矢量分布数据。
[0047]
图像二值化分割采用envi遥感图像处理软件试用版“masking-build mask”工具,设置“0.1-1.0”为二值化阈值范围,对步骤五算得的“水体出现概率图像”进行分割,得到高潮位水体分布栅格数据,设置“0.85-1.0”为二值化阈值范围,对步骤五算得的“水体出现概率图像”进行分割,得到低潮位水体分布栅格数据。
[0048]
利用qgis软件的“栅格转矢量”工具,分别对高潮位水体分布栅格数据、低潮位水体分布栅格数据进行矢量化,得到“表示高潮位与低潮位水边线位置的”的矢量数据。
[0049]
步骤七:海岸线位置的确定与潮滩范围的圈定
[0050]
对低潮位水位线进行编辑修改,去除养殖池塘等人工水体水边线,即为海岸线位置。根据高潮位水位线与海岸线位置,采用qgis软件的“数字化工具”圈定介于二者之间的区域,形成表示“高潮位水位线与海岸线位置之间区域”的矢量数据,即为潮滩范围(如图4所示)。低潮位水位线进行编辑修改采用qgis软件的“矢量编辑”工具完成,养殖池塘根据“水体出现概率图像”上人工水体规则外形(如长方形)进行判识。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。