1.本发明涉及库德光路调试技术领域,具体涉及一种高功率激光库德光路调试方法。
背景技术:
2.随着半导体激光器输出功率不断提高,带动了高能激光发射装备的研制浪潮,该装备具有工作距离远,输出能量高,跟瞄和发射共光路的特点,系统中激光往往通过库德光路系统传输到发射镜头内,通过库德光路旋转实现水平360
°
,俯仰0
°
到90
°
扫描,传统库德光路装调用于成像系统,只能保证转台转动过程中光轴角度不发生变化,光束位置会发生平移,在高能激光系统中望远子系统扩束倍率一般较大,当通过库德光路传输的激光束位置发生偏移时,主镜上光斑位置偏移量按照扩束倍率等比例放大,将导致高能激光超出主镜反射面,对系统造成损坏,因转台转动导致的激光光斑位置变化情况如图1(a)和图1(b)所示。其中图1(a)为装置旋转到某一位置时激光出射位置情况,图1(b)为装置旋转到另一位置时激光出射位置情况,可以看出激光出射位置在此过程中发生了上移,传统的调试方法不能排除这类问题。
技术实现要素:
3.本发明的一个目的是解决现有技术中的库德光路调试方法不能避免转台旋转过程中激光光斑位置发生变化的缺陷。
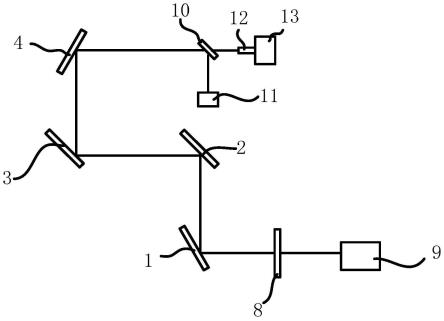
4.根据本发明的第一方面,提供了一种高功率激光库德光路调试方法,所述库德光路从入口至出口依次包括第一库德反射镜、第二库德反射镜、第三库德反射镜以及第四库德反射镜;所述方法包括:将基准镜安装于库德光路入口位置,使基准镜中心十字与高功率激光入射轴位置重合,且基准镜镜面与高功率激光光轴垂直;沿出射光路依次设置分光镜、定焦镜头和第一探测器,在分光镜的反射光路上设置第二探测器;用内调焦望远镜对准基准镜,内调焦望远镜光轴与基准镜平面自准直,中心与基准镜十字中心重合;将转台俯仰轴固定,转动水平轴,观察第一探测器和第二探测器接收到的十字位置变化量,通过调整第一库德反射镜和第二库德反射镜,使转动转台水平轴时第一探测器和第二探测器中接收到的十字位置变化量分别小于第一预设值和第二预设值;将转台水平轴固定,转动俯仰轴,观察第一探测器和第二探测器中接收到的十字位置变化量,通过调整第三库德反射镜和第四库德反射镜,使转动转台俯仰轴时第一探测器和第二探测器中接收到的十字位置变化量分别小于第三预设值和第四预设值。
5.优选地,所述定焦镜头的焦距为100mm。
6.优选地,所述第一预设值为1个像素,所述第二预设值为10个像素。
7.本发明的一个技术效果是:1.既保证光束经过库德光路传输后光轴角度不变,同时还可以保证光轴位置不发生改变,减小了系统发射口径,并使系统转台在大角度扫描过程中光轴角度不变,提高系统的瞄准精度的同时提高了系统的安全性。2.通过内调焦望远
镜对准激光发射入口基准镜,通过两路探测器对库德光路光轴角度和光轴位置同时监测,并通过调整库德光路中镜片角度使光轴与转台转轴重合,调试完成后水平轴360
°
转动过程中光轴角度变化小于25微弧度,光束位置变化小于0.025毫米,提高了系统的跟瞄精度,减少了光斑在主镜的跳动量,从而减小了系统的发射口径,提高了高功率激光系统安全性。
8.通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
9.被结合在说明书中并构成说明书的一部分的附图示出了本发明的实施例,并且连同其说明一起用于解释本发明的原理。
10.图1为现有技术的库德光路调试方法产生激光光斑位置变化的示意图;其中图1(a)为转台处于某一旋转角度时光束位置的示意图,图1(b)为转台处于另一旋转角度时光束位置发生变化的示意图;
11.图2为库德光路与转台的水平旋转轴、俯仰旋转轴的位置关系示意图;其中a为水平平台的旋转轴,b为俯仰旋转轴;
12.图3为步骤s1~步骤s3完成后系统所处的状态示意图;
13.图4为步骤s4中转动水平轴以进行调试的示意图;
14.图5为步骤s5中转动俯仰轴以进行调试的示意图。
15.附图标记说明:
16.1-第一库德反射镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2第二库德反射镜
17.3-第三库德反射镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4-第四库德反射镜
18.5-次镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6-主镜
19.7-高能激光光束
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8-基准镜
20.9-内调焦望远镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10-分光镜
21.11-第二探测器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12-定焦镜头
22.13-第一探测器
具体实施方式
23.现在将参照附图来详细描述本发明的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。
24.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
25.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
26.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
27.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
28.本发明提供一种高功率激光库德光路调试方法,库德光路如图1(a)所示,从入口至出口依次包括第一库德反射镜1、第二库德反射镜2、第三库德反射镜3以及第四库德反射镜4,还包括主镜6和次镜5,7为高能激光光束。图2示出了转轴的位置及旋转方向,其中第一库德反射镜1和第二库德反射镜2间光束的光轴与转台的水平轴a基本重合,第四库德反射镜出射光束的光轴与俯仰轴b基本重合。基本重合的含义是:装置已经进行过粗调整,转轴与相应光轴在粗调整的精度范围内是重合的,但是仍需精度更高的精细调整使光斑位置的变化量更小。即本发明的最终目的是在基本重合的前提下再次通过调整各个库德反射镜的位置以实现精细调整。
29.本发明的方法具体包括:
30.步骤s1:将基准镜8安装于库德光路入口位置,使基准镜8中心十字与高功率激光入射轴位置重合,且基准镜8镜面与高功率激光光轴垂直。“高功率激光”根据技术领域的一般定义,是指功率不小于10kw或脉冲能量不小于500j的激光。高功率激光入射轴是指图3中进入库德光路并且经过第一库德反射镜1反射的入射激光的光轴。
31.步骤s2:沿出射光路依次设置分光镜10、定焦镜头12和第一探测器13,在分光镜10的反射光路上设置第二探测器11。
32.步骤s3:用内调焦望远镜9对准基准镜8,内调焦望远镜9光轴与基准镜8平面自准直,中心与基准镜8十字中心重合。步骤s1至步骤s3完成后,即为图3所示出的状态,为调试前的一个初始状态。
33.步骤s4:将转台俯仰轴固定,转动水平轴,观察第一探测器13和第二探测器11接收到的十字位置变化量,通过调整第一库德反射镜1和第二库德反射镜2,使转动转台水平轴时第一探测器13和第二探测器11中接收到的十字位置变化量分别小于第一预设值和第二预设值。本步骤的示意图如图4所示,即通过旋转水平台的转轴,使装置由图3变为图4状态。在一个实施例中,第一探测器13和第二探测器11的像素尺寸均为2.5微米,当第一探测器13中接收到的十字图像随转台转动一周位置变化1个像素,表示高能激光光轴与该转轴角度偏差为25微弧度;第二探测器11中接收到的十字图像随转台转动一周位置变化1个像素,表示高能激光光轴与该转轴位置偏差为2.5微米。需要说明的是,转动水平轴是指转动完整的一周,即旋转完成后仍回到图3所示的位置,并且变化量是指此过程中偏差量的最大值。
34.步骤s5:将转台水平轴固定,转动俯仰轴,观察第一探测器13和第二探测器11中接收到的十字位置变化量,通过调整第三库德反射镜3和第四库德反射镜4,使转动转台俯仰轴时第一探测器13和第二探测器11中接收到的十字位置变化量分别小于第三预设值和第四预设值。本步骤的示意图如图5所示,即通过旋转俯仰轴,使装置由图3变为图5状态。转动俯仰轴是指转动完整的一周,即旋转完成后仍回到图3所示的位置,并且变化量是指此过程中偏差量的最大值。
35.第一预设值、第二预设值、第三预设值、第四预设值可以设置为不同的值,代表不同维度的精度要求。上述预设值的单位可以为像素。在一个具体的实施例中,第一预设值和第三预设值为1个像素,代表第一探测器13在两个维度的旋转过程中光斑位置变化量均不能大于1个像素,即高能激光光轴与该转轴角度偏差需要小于25微弧度。第二预设值和第四预设值为10像素,代表第二探测器11在两个维度的旋转过程中光斑位置变化量均不能大于10个像素,即高能激光光轴与该转轴的位置偏差需要小于25微米。
36.由此可见,本发明的方法克服了传统库德光路无法控制扫描过程中高能激光束位置变化的不足,提供了一种基于内调焦望远镜和分光探测镜组的高精度调试方法,可通过对库德光路光轴角度和光轴位置同时监测,在调试过程中通过调整第一库德反射镜和第二库德反射镜的角度使光轴与转台水平轴重合,通过调整第三库德反射镜和第四库德反射镜的角度使光轴与俯仰轴重合。最终实现在转台转动时光轴角度不发生变化,光束位置不发生变动。
37.虽然已经通过例子对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改。本发明的范围由所附权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
